Изобретение относится к магнитному курсоуказанию и навигации и может быть использовано на летательных аппаратах для определения коэффициентов девиации, описывающих изменения напряженности результирующего магнитного поля земли (МПЗ), вносимые летательным аппаратом (ЛА) непосредственно в полете, и компенсации этих изменений при вычислении магнитного курса ψм.
В связи с тем, что характер груза подвесного или несъемного, включаемого под ток оборудования ЛА, а значит, и коэффициенты девиации могут меняться на каждом вылете, может возникать необходимость компенсации девиации магнитометрических датчиков на каждом вылете.
Трехкомпонентный магнитометрический датчик измеряет составляющие вектора напряженности МПЗ, поэтому правомерно понимать девиацию датчика как искажение трех его сигналов под воздействием железа ЛА, что и описывают уравнения Пуассона, приведенные ниже.
Уравнения Пуассона:
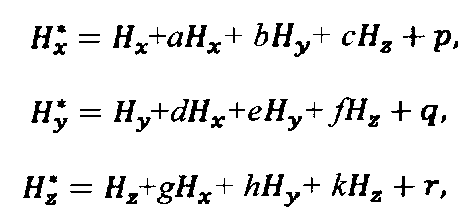
где:



Hx, Hy, Hz - составляющие вектора напряженности МПЗ;
а, b, с, d, е, f, g, h, k, p, q, r - коэффициенты, называемые параметрами Пуассона.
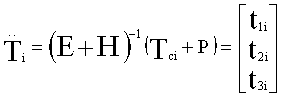
Или в матричном виде

где:
Тс - вектор измерений магнитометра;
Е - единичная матрица;
Н - матрица с коэффициентами влияния «мягкого» железа на измерения магнитометра;
Tn - вектор проекций напряженности магнитного поля Земли на оси инерциальной системы координат;
Р - вектор влияния «твердого» железо ЛА на измерения магнитометра.
При этом:

Компенсацией девиации магнитометра является исправление его сигналов в целях определения истинного МПЗ. При этом девиация как ошибка определения магнитного курса является следствием девиации магнитометра. Для повышения точности определения девиации магнитометра необходимо учитывать влияние индуктивного магнитного поля ЛА, то есть удерживать в расчетах все или часть параметров Пуассона a, b, c, d, e, f, g, h, k. Так как идентификация всех этих параметров представляется чрезмерно сложной, целесообразно выделить наиболее значимые коэффициенты. Поэтому предлагается использовать приведенную ниже модель, которая учитывает влияние постоянного магнитного поля в вертикальном, продольном и поперечном направлениях. То есть из девяти параметров Пуассона удерживаются коэффициенты a, b, d, e, и, кроме того, полагается b=d. Такая модель является упрощенной, однако она позволяет учесть влияние второй по значимости четвертной девиации на ошибку определения магнитного курса.
Как показывают расчеты, модель содержит шесть параметров Пуассона, которые устойчиво определяются по ограниченному объему полетных данных. Допущение о равенстве b=d является пренебрежением влияния индуктивного магнитного поля ЛА на постоянное смещение оценки магнитного курса, которое обычно мало меняется и устраняется поворотом датчика.
Запишем упрощенные уравнения в следующем виде:

где:

Коэффициенты р, q, r учитывают влияние магнетизма твердого в магнитном отношении железа, образующего постоянное магнитное поле ЛА и сохраняющего свой магнетизм за счет большой коэрцитивной силы. Они являются проекциями напряженности постоянного магнитного поля ЛА на его строительные оси, не зависят от магнитной широты и при данном магнитном состоянии ЛА остаются практически постоянными, пока не произойдет перемещение железных масс.
Коэффициенты а, b, d, е учитывают влияние магнитного поля мягкого в магнитном отношении железа ЛА, образующего переменное магнитное поле, зависящее от курса, не сохраняющего свой магнетизм за счет малой коэрцитивной силы и вызывающего переменное индуктивное магнитное поле ЛА. Параметры Пуассона зависят от магнитной широты, но эти изменения незначительны и ими обычно пренебрегают. Таким образом, коэффициенты а, b, d, е, p, r, q в уравнениях Пуассона (1) можно полагать постоянными.
Известны способ цифровой компенсации электромагнитной девиации для магнитного электронного компаса и устройство для его осуществления, описанные в патенте RU 2210060 С2, МПК7 G01C 17/38, опубл. 10.08.2003.
Недостатком данного способа является необходимость иметь размагничивающее устройство и невозможность реализации его на борту ЛА для определения девиации в полете.
Наиболее близким по технической сущности к заявляемому изобретению и принятым за прототип является «Способ определения девиации курсоуказателя подвижного объекта», представленный в авторском свидетельстве SU 1633930 А1, МПК6 G01C 17/38, опубл. 10.12.1995.
Согласно описанию изобретения, данный способ основан на предстартовом нахождении коэффициентов Пуассона и компонент постоянного магнитного поля и использовании разработанных зависимостей определения магнитного курса в процессе движения объекта.
Устройство, реализующее данный способ, содержит, в частности, блок из трех ортогональных жестко закрепленных на корпусе объекта магнитометров для измерения проекций продольной, поперечной и нормальной составляющих вектора напряженности результирующего магнитного поля объекта на оси связанной системы координат OXYZ, вычислитель для определения в процессе предстартовой подготовки коэффициентов Пуассона и компонент магнитного поля объекта и вычислитель для определения угла магнитного курса подвижного объекта.
К недостаткам известных способа и устройства можно отнести большой объем работ по измерению составляющих вектора напряженности результирующего магнитного поля объекта на разных курсах в период подготовки ЛА к вылету и невозможность реализации на борту для определения девиации в полете.
Цель изобретения - обеспечение возможности определения и компенсации девиации магнитометрических датчиков в полете при каждом вылете, используя плановые маневры ЛА на маршруте полета или специальные маневры в полете, и сокращение тем самым трудозатрат и сроков подготовки ЛА к вылету.
Поставленная цель достигается за счет того, что согласно способу для определения и компенсации девиации магнитометрических датчиков, основанному на нахождении коэффициентов Пуассона, измерении компонент магнитного поля объекта и обработке результатов измерений, в качестве измеряемых компонент магнитного поля используют проекции продольной, поперечной и нормальной составляющих вектора результирующего магнитного поля на строительные оси ЛА при выполнении маневра ЛА непосредственно в полете, измерения и обработку результатов измерений производят многократно, используя метод итерации, причем обработку результатов измерений осуществляют путем определения модулей результирующих МПЗ, формирования функций чувствительности и автоматического определения на их основе приращений магнитной девиации магнитометрических датчиков.
Заявляемый способ может быть реализован с помощью устройства для определения и компенсации девиации магнитометрических датчиков, содержащего трехкомпонентный магнитометрический датчик и вычислитель магнитного курса, первый и второй входы которого являются входами угла крена и тангажа ЛА, в которое дополнительно введены блок оценки модуля МПЗ, блок формирования функций чувствительности и блок определения вектора приращений коэффициентов магнитной девиации, причем первый, второй и третий входы блока оценки модуля МПЗ соединены с соответствующими выходами трехкомпонентного магнитометрического датчика по сигналам продольной, поперечной и нормальной составляющих вектора напряженности МПЗ, четвертый, пятый, шестой, седьмой, восьмой и девятый входы являются входами начальных значений соответствующих коэффициентов девиации, десятый вход является входом единичного сигнала, первый, второй и третий выходы блока оценки модуля МПЗ подключены соответственно к третьему, четвертому и пятому входам вычислителя магнитного курса по сигналам измерений магнитометрического датчика, скорректированных с учетом компенсации девиации, четвертый выход блока оценки модуля МПЗ по сигналу, соответствующему модулю МПЗ, подключен к входу блока формирования функций чувствительности, выходы которого по сигналу вектора разностей между оценкой модуля МПЗ, усредненной по всему отрезку наблюдения, и оценками, усредненными на частных интервалах, и по сигналу функции чувствительности подключены к соответствующим входам блока определения вектора приращений коэффициентов магнитной девиации, выход которого по сигналу вектора приращений коэффициентов девиации подключен к одиннадцатому входу блока оценки модуля МПЗ.
Сущность изобретения поясняется чертежом, на котором представлена структурная схема устройства для определения и компенсации девиации магнитометрических датчиков.
Устройство содержит трехкомпонентный магнитометрический датчик 1, вычислитель 2 магнитного курса, блок 3 оценки модуля МПЗ, блок 4 формирования функций чувствительности и блок 5 определения вектора приращений коэффициентов магнитной девиации.
Блок 3 производит оценку модуля МПЗ на основании обработки сигналов



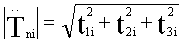

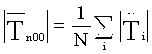
В результате на выходе блока 3 формируются сигналы t1, t2, t3, соответствующие измерениям магнитометрического датчика 1, скорректированным с учетом компенсации девиации, и поступающие на входы вычислителя 2 магнитного курса, а также сигнал Tn, соответствующий модулю МПЗ и поступающий на вход блока 4 формирования функций чувствительности. В блоке 4 формируются сигналы, соответствующие вектору В разностей между оценкой модуля МПЗ, усредненной по всему отрезку наблюдения, и оценками, усредненными на частных интервалах 

и функции чувствительности 

Блок 5 определения вектора приращений коэффициентов магнитной девиации, входы которого соединены с выходами блока 4, а выход подключен к входу блока 3, осуществляет определение приращений коэффициентов девиации â=(ATA)-1ATB, αT=[Δp Δr Δq Δa Δe Δb].
В результате на выходе вычислителя 2 магнитного курса, на вход которого поступают исправленные на величину коэффициентов девиации сигналы t1, t2, t3 с выходов блока 3 и сигналы углов крена γ и тангажа ϑ, поступающие, например, из системы курсовертикали, формируется сигнал, соответствующий исправленному на величину девиации магнитному курсу

где: 
Задача определения и компенсации девиации магнитометрических датчиков в данном случае, как об этом говорилось ранее, решается методом итерации. Рассмотрим работу устройства пошагово.
Шаг 1.
Задание начальных условий.
N - число обрабатываемых отсчетов сигналов магнитометра (1300);
J - число интервалов, на которые разбивается весь отрезок времени наблюдения (99); 

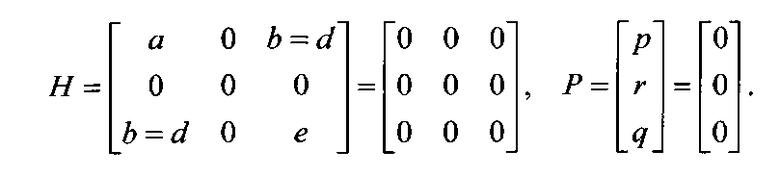
Н=0 - матрица начальных значений параметров Пуассона, в которых удерживаются коэффициенты a, e, b=d; Р=0 - вектор начальных значений коэффициентов p, q, r.
С учетом направления связанных осей ЛА матрица и вектор принимают вид
Шаг 2.
Начало цикла итераций.
Число итераций принято фиксированным. k - номер итерации, 
Шаг 3.
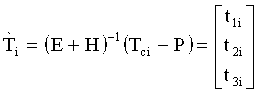
Оценка модуля МПЗ 
1. 
2. 
3. 
4. 
Шаг 4.
Оценка средних значений модуля МПЗ 

1. 

n1j=n(j-1)+1 - номер первого отсчета на j-том интервале;
n2j=n(j-1)+n - номер последнего отсчета на j-том интервале;
2. 

3. 


4. 


5. 
6. Запоминание вектора частных оценок модуля МПЗ.
Вектор 
Шаг 5.
Формирование вектора В разностей между оценкой модуля МПЗ, усредненной по всему отрезку наблюдения, и оценками, усредненными на частных интервалах (блок 4).
1. 
2. 
Шаг 6.
Вычисление функций чувствительности измерений модуля МПЗ к вариациям искомых коэффициентов (блок 4).
Всего определяются 6 функций чувствительности по числу искомых коэффициентов.
δ=0.001 - величина вариации, одинаковая для всех коэффициентов.
Шаг 6.1.
Функция чувствительности φp по коэффициенту р в векторе Р.
1. Вариация коэффициента р, р=р+δ.
2. Выполнение пунктов 3, 4, 5 шага 4 с учетом измененного значения коэффициента, а именно:
2.1. 
2.2 
2.3 
3. Формирование вектора значений функции чувствительности по коэффициенту р.

4. Восстановление значения коэффициента, р=р-δ.
Шаг 6.2.
Функция чувствительности φr по коэффициенту r в векторе Р.
1. Вариация коэффициента r, r=r+δ.
2. Выполнение пунктов 3, 4, 5 шага 4 с учетом вариации коэффициента, а именно:
2.1. 
2.2. 
2.3 
3. Формирование вектора значений функции чувствительности по коэффициенту r.
4. Восстановление значения коэффициента, r=r-δ.
Шаг 6.3.
Функция чувствительности φq по коэффициенту q в векторе Р.
Вычисляется аналогично шагам 6.1 и 6.2, но с учетом вариации коэффициента q=q+δ.
Шаг 6.4.
Функция чувствительности φa по параметру а в матрице H.
Вычисляется аналогично шагам 6.1 и 6.2, но с учетом вариации а=а+δ.
Шаг 6.5.
Функция чувствительности φe по коэффициенту е в матрице H.
Вычисляется аналогично шагам 6.1 и 6.2, но с учетом вариации е=е+δ.
Шаг 6.6.
Функция чувствительности φbd по коэффициентам b, d в матрице H.
Внимание! Вычисляется аналогично шагам 6.1 и 6.2, но с учетом вариации сразу двух коэффициентов b=b+δ и d=d+δ.
Шаг 7.
Вычисление приращений оценок коэффициентов (блок 3).
Формируется система линейных алгебраических уравнений.
Аα=В
Здесь А - матрица функций чувствительности размерностью (J,6)
В - вектор, размерностью J, сформированный на шаге 5.
α - вектор приращений
αT=[Δp Δr Δq Δa Δe Δb]
Решение определяется в блоке -3.
â=(ATA)-1ATB.
Шаг 8.
Уточнение оценок коэффициентов (блок 3).
Выполняется прибавлением найденных приращений к оценкам коэффициентов на начало итерации.
Pk+1=Pk+γΔp, rk+1=rk+γΔr, qk+1=qk+γΔq,
ak+1=ak+γΔa, ek+1=ek+γΔe, bk+1=bk+γΔb, dk+1=dk+γΔd,
Δd=Δb. γ=0.75
k - номер итерации.
Контроль сходимости итераций.
При правильном решении приращения Δр Δr Δq Δа Δе Δb по мере выполнения итераций стремятся к нулю. Итерационный процесс полагаем успешным, если на последней итерации выполняется условие:

Шаг 9.
Замыкание итераций.
При k<K выполняется переход к шагу 2. При k=K и выполнении условий контроля на шагах 7 и 8 полученные оценки коэффициентов полагаются правильными.
Текущее значение магнитного курса (блок 2) изделия вычисляется с помощью соотношений:
1. 
2. 
Техническим результатом использования изобретения является упрощение определения и компенсации коэффициентов девиации, сокращение сроков подготовки ЛА к вылету и возможность определения коэффициентов и их компенсации при каждом вылете автоматически, используя плановые маневры ЛА на маршруте полета, или путем использования специальных маневров в полете.
Заявляемые способ и устройство являются реализуемыми и могут быть использованы на всех типах ЛА. В качестве магнитометрического датчика могут быть использованы магниторезистивные сенсоры. В качестве входных сигналов вычислителя магнитного курса могут быть использованы выходные сигналы бортовых курсовертикалей или БИНС, при этом вычислитель магнитного курса и блоки оценки модуля МПЗ, формирования функций чувствительности и определения вектора приращений коэффициентов магнитной девиации могут быть реализованы на стандартных элементах вычислительной техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| Способ определения углов пространственной ориентации | 2016 |
|
RU2713078C1 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления | 2015 |
|
RU2607305C1 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2022 |
|
RU2796372C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НА БОРТУ ДВИЖУЩЕГОСЯ ФЕРРОМАГНИТНОГО НОСИТЕЛЯ КОМПОНЕНТ МАГНИТНОГО ПОЛЯ ЗЕМЛИ И СОСТАВЛЯЮЩИХ ЕГО СОБСТВЕННОГО МАГНИТНОГО ПОЛЯ | 1994 |
|
RU2073891C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОЙ МАГНИТНОЙ АНОМАЛИИ | 2007 |
|
RU2411550C2 |
Изобретение относится к магнитному курсоуказанию и навигации и может быть использовано на летательных аппаратах для определения коэффициентов девиации, описывающих изменения напряженности магнитного поля земли (МПЗ), вносимые летательным аппаратом (ЛА) непосредственно в полете, и компенсации этих изменений при вычислении магнитного курса ψм. Способ основан на нахождении коэффициентов Пуассона, измерении компонент магнитного поля объекта и обработке результатов измерений. В качестве измеряемых компонент магнитного поля используют проекции продольной, поперечной и нормальной составляющих вектора результирующего магнитного поля на строительные оси ЛА при выполнении маневра ЛА в полете. Измерения и обработку результатов измерений производят многократно, используя метод итерации, причем обработку результатов измерений осуществляют путем определения модулей результирующих МПЗ, формирования функций чувствительности и автоматического определения на их основе приращений магнитной девиации магнитометрических датчиков. Устройство для осуществления способа содержит трехкомпонентный магнитометрический датчик 1, вычислитель 2 магнитного курса, блок 3 оценки модуля МПЗ, блок 4 формирования функций чувствительности и блок 5 определения вектора приращений коэффициентов магнитной девиации. Технический результат - упрощение определения и компенсации коэффициентов девиации, сокращение сроков подготовки ЛА к вылету, автоматическое определение коэффициентов и их компенсации при каждом вылете. 2 н.п. ф-лы, 1 ил.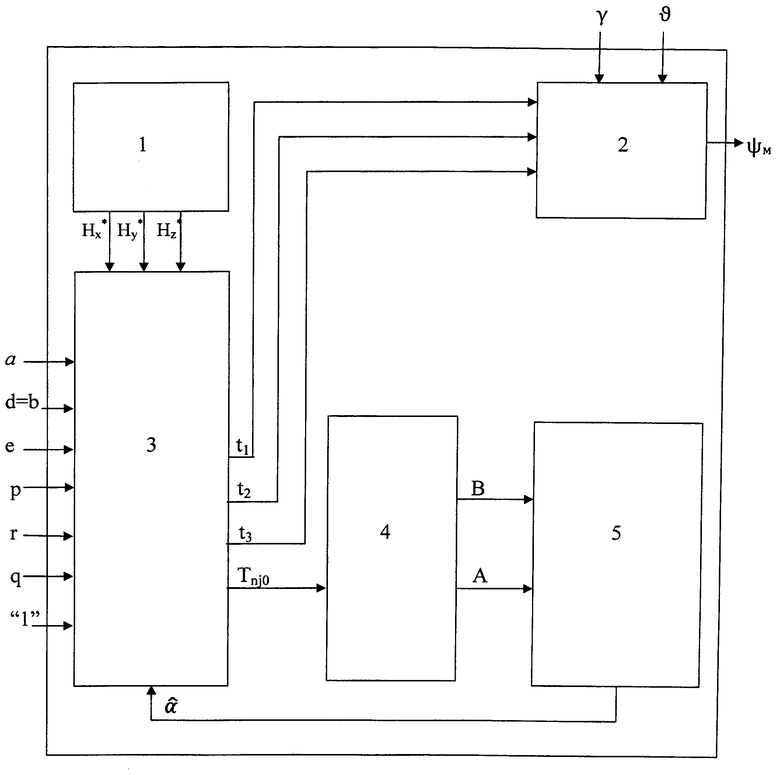
1. Способ для определения и компенсации девиации магнитометрических датчиков, основанный на нахождении коэффициентов Пуассона, измерении компонент магнитного поля объекта и обработке результатов измерений, отличающийся тем, что в качестве измеряемых компонент магнитного поля используют проекции продольной, поперечной и нормальной составляющих вектора результирующего магнитного поля на строительные оси ЛА при выполнении маневра ЛА непосредственно в полете, измерения и обработку результатов измерений производят многократно, используя метод итерации, причем обработку результатов измерений осуществляют путем определения модулей результирующих МПЗ, формирования функций чувствительности и автоматического определения на их основе приращений магнитной девиации магнитометрических датчиков.
2. Устройство для определения и компенсации девиации магнитометрических датчиков, содержащее трехкомпонентный магнитометрический датчик и вычислитель магнитного курса, первый и второй входы которого являются входами угла крена и тангажа ЛА, отличающееся тем, что в него дополнительно введены блок оценки модуля МПЗ, блок формирования функций чувствительности и блок определения вектора приращений коэффициентов магнитной девиации, причем первый, второй и третий входы блока оценки модуля МПЗ соединены с соответствующими выходами трехкомпонентного магнитометрического датчика по сигналам продольной, поперечной и нормальной составляющих вектора напряженности МПЗ, четвертый, пятый, шестой, седьмой, восьмой и девятый входы являются входами начальных значений соответствующих коэффициентов девиации, десятый вход является входом единичного сигнала, первый, второй и третий выходы блока оценки модуля МПЗ подключены соответственно к третьему, четвертому и пятому входам вычислителя магнитного курса по сигналам измерений магнитометрического датчика, скорректированных с учетом компенсации девиации, четвертый выход блока оценки модуля МПЗ по сигналу, соответствующему модулю МПЗ, подключен к входу блока формирования функций чувствительности, выходы которого по сигналу вектора разностей между оценкой модуля МПЗ, усредненной по всему отрезку наблюдения, и оценками, усредненными на частных интервалах, и по сигналу функции чувствительности подключены к соответствующим входам блока определения вектора приращений коэффициентов магнитной девиации, выход которого по сигналу вектора приращений коэффициентов девиации подключен к одиннадцатому входу блока оценки модуля МПЗ.
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕВИАЦИИ КУРСОУКАЗАТЕЛЯ ПОДВИЖНОГО ОБЪЕКТА | 1989 |
|
SU1633930A1 |
| РАЗНОСТНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ДЕВИАЦИИ МАГНИТНЫХ КОМПАСОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1971 |
|
SU368813A1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2427799C1 |
| US 20130245984 A1, 19.09.2013; | |||
| US 20020100178 A1, 01.08.2002 | |||

