Изобретение относится к области поверки магнитоизмерительных систем, например, для поиска крупных и мелких ферромагнитных объектов (магнитных аномалий, подводных лодок, донных мин и т.д.)
В настоящее время поверку многодатчиковых магнитоизмерительных систем осуществляют стандартным способом с помощью воспроизведения однородного магнитного поля (МП) в специальной лаборатории с применением специальных технических средств. При этом, поверку (определение соответствующих погрешностей) проводят для каждого из магнитометров системы отдельно. Такая поверка имеет следующие недостатки:
- необходимо демонтировать с носителя поверяемые датчики;
- требуется специальная поверочная лаборатория, оборудованная для воспроизведения однородного МП;
- требуется значительное время на последовательное проведение поверки каждого датчика системы.
В то же время, МП искомого объекта неоднородно, т.е. зависимо от координат. Неоднородно и поле самого носителя системы, которое по-разному искажает результаты измерения штатными датчиками в разных местах носителя. В связи с этим, чрезвычайно актуально стоит задача поверки (определения соответствующих погрешностей) многодатчиковой магнитоизмерительной системы непосредственно на носителе системы с учетом погрешностей от носителя.
При магнитном поиске объект аппроксимируют точкой с магнитным моментом (ММ), неизвестными являются координаты точки приложения ММ и его компоненты. Принято различать операции обнаружения, пеленгации, локализации и классификации искомого объекта. При обнаружении фиксируют факт наличия неоднородного магнитного поля, или факт «где-то что-то есть». При пеленгации определяют неизвестное направление на искомый объект, т.е. определяют единичный вектор направления или направляющие косинусы углов относительно осей выбранной системы координат (СК) наблюдения. При локализации определяют неизвестные координаты искомого объекта в этой СК. При классификации определяют неизвестные компоненты ММ искомого объекта в той же СК. Многие специалисты под обнаружением понимают все, вплоть до классификации. Это приводит к путанице в оценках предельных расстояний. Например, обнаружить «где-то что-то» можно с какого-то предельного расстояния, а определить направление на искомый объект с минимально приемлемой погрешностью, например с погрешностью телесного угла π/2 (это размер октанта СК 4π/8), можно с существенно меньшего расстояния, не говоря уже о локализации или классификации объекта. В монографии [Специальная магнитометрия. Р.Б. Семевский и др. СПб Наука, 2002], посвященной магнитному поиску, приводятся оценки дальностей (и вероятностей) обнаружения, но нет оценок погрешностей пеленгации, локализации или классификации. С другой стороны, в статье [Ю.М. Иванов, В.Г. Семенов. Оценки погрешностей пеленгации и локализации источника магнитного поля дипольной модели. Измерительная техника №5, 2008] показано, что оценки этих погрешностей нарастают лавинообразно с увеличением расстояния до объекта поиска. Поэтому существующая практика переноса оценок обнаружения на пеленгацию, локализацию нарушает единство измерений.
Известен способ поверки измерительных приборов [Патент РФ №2428708], а также способ поверки магнитоизмерительных приборов [Патент РФ №2010257]. Последний выбран в качестве прототипа по совокупности общих признаков наиболее близких заявляемому способу.
Известный способ поверки включает воздействие полем дипольной меры на поверяемый прибор, расположенный на фиксированном расстоянии от меры.
Причиной, препятствующей достижению указанного ниже технического результата для известного способа является то, что известный способ посвящен поверке только одного демонтированного магнитоизмерительного прибора (магнитометра) в лабораторных условиях.
Задачей, на решение которой направлено заявляемое изобретение, заключается в обеспечении комплексной бездемонтажной поверки магнитометрических (многодатчиковых) систем поиска источников магнитного поля.
Технический результат, получаемый при осуществлении изобретения, состоит в определении погрешностей магнитометрической системы поиска с учетом погрешностей, вносимых ферромагнитным носителем средств поиска.
Указанный технический результат достигается тем, что заявляемый способ поверки магнитоизмерительных приборов с помощью дипольной меры магнитного момента, расположенной на фиксированном расстоянии от поверяемого объекта, отличается, тем, что датчиками магнитометров, размещенными на штатных местах системы поиска источников МП, измеряют приращения индукции магнитного поля относительно опорного датчика, а трехкомпонентную меру магнитного момента ориентируют вдоль осей системы координат поиска, затем стандартным средством измеряют радиус-вектор между центром системы координат и центром меры, воспроизводят мерой некоторый магнитный момент, по которому рассчитывают, а также измеряют соответствующие приращения индукции, по которым косвенно измеряют радиус-вектор к источнику и его магнитный момент, после чего определяют погрешности измерений как разности измеренных и заданных величин с учетом погрешностей, вносимых носителем, на котором расположены поверяемые приборы.
На Фиг.1 изображена схема реализации заявляемого способа, где 0, 1, 2, 3, 4, 5, 6 - датчики трехкомпонентных или модульных бортовых магнитометров, установленных на ферромагнитном носителе 7 аппратуры поиска источников магнитного поля, 8 - трехкомпонентная мера магнитного момента (ММ), расположенная вне носителя 7. Магнитометры 1, 2…6 включены по схеме измерения приращений относительно магнитометра 0, расположенного в центре СК носителя 7.
Заявляемый способ действует следующим образом. При поверке системы поиска на носителе 7 меру 8 устанавливают на некотором расстоянии от центра СК и ориентируют вдоль ее осей, измеряют компоненты радиус-вектора от центра 0 до центра меры 8. Ориентацию меры 8 и измерение радиус-вектора осуществляют с помощью страндартных средств измерения линейно-угловых величин. На Фиг.1 этот радиус-вектор обозначен символом R. Пропуская и измеряя токи через обмотки меры 8, воспроизводят заданные компоненты магнитного момента. На Фиг.1 он обозначен символом М.
Для разделения неоднородного и однородного полей искомого источника и Земли, используют непосредственно измерение приращений МП на той или другой известной базе (расстоянии). Для локализации используют не менее двух трехкомпонентных приращений. Т.е. используют не менее 6 чисел, для определения 6 неизвестных: 3 компонент радиус-вектора к искомому источнику и 3 компонент его магнитного момента. Датчиками 1, 2…6 измеряют относительно опорного датчика 0 приращения, индукции магнитного поля, заданные мерой 8: B10=B1-B0, …В60=B6-В0. По измеренным приращениям В10изм, …В60изм решают систему нелинейных уравнений относительно неизвестных радиус-вектора к источнику, и его магнитного момента. Другими словами, эти неизвестные определяют или косвенно измеряют. На Фиг.1 они обозначены как Rизм и Mизм. После чего находят погрешности всей поверяемой системы как разности (косвенно) измеренных и заданных R и М

а также погрешности измерения каждого приращения индукции

Заданные В10…В60 определяют с помощью известной формулы для индукции МП

где: R, n - размер и единичное направление радиус-вектора между точкой определения индукции В и центром меры 5;
M, m - размер и единичное направление магнитного момента меры 5;
φ=m·n.
Подставляя в (3) радиус-вектор Ri=R+ri, где ri - известный радиус-вектор из точки i=1, 2…6 носителя 7 к центру СК, вычисляют индукцию в i-той точке и приращения индукции между точками В10…В60. Радиус-вектор ri определяют по чертежу носителя 7.
С помощью (1) контролируют работоспособность всей системы поиска, с помощью (2) контролируют влияние носителя 7 на каждую компоненту каждого измерителя приращений 10, 20…60 и снижают это влияние для тех компонент, где оно превышает допустимый уровень.
Для проверки заявляемого способа проведены следующие расчеты в пакете «МатЛаб». Примем r1=(6 0 0) м; r2=(-6 0 0) м; r3=(0 6 0) м; r4=(0 -6 0) м; r5=(0 0 6) м; r6=(0 0 -6) м; радиус-вектор R=(-6 100 3) м; MM, воспроизводимый мерой 8: М=(2000 7000 6856) Ам2; СКО (на компоненту) собственных шумов феррозондовых датчиков в режиме приращения 0.02 нТл [Специальная магнитометрия 2002 г. С.12].
Допустим, что влияние ферромагнитного носителя на датчики устранено с остаточной систематической погрешностью:

где первый столбец для приращения 10, второй для 20 и т.д.
Расчет проведен с многократным повторением (100 раз), результаты усреднены, итоговые погрешности, представленные в терминах СКО и оценки среднего, приведены в таблице 1 в зависимости от размера (4): 0, а, 2а.
В таблице 2 приведены результаты расчета погрешности среднего для приращений индукции (2), вычисленных с помощью (3).
Как видно из данных таблицы 1, СКО меняется незначительно, но погрешность среднего меняется почти пропорционально а. Первый столбец данных показывает предельные значения погрешностей определения R и М, которые могут быть достигнуты при устранении влияния носителя на результаты измерения приращений индукции.
Данные таблицы 2 позволяют судить о том, какие компоненты измерителей приращений превышают допустимый уровень (например, 0.05 нТл) и нуждаются в первоочередной коррекции. В таблице они отмечены жирным шрифтом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ МАГНИТНОГО ДИПОЛЯ | 2010 |
|
RU2456642C2 |
| СПОСОБ ЛОКАЛИЗАЦИИ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ ДИПОЛЬНОЙ МОДЕЛИ | 2010 |
|
RU2433420C1 |
| Способ измерения приращения индукции магнитного поля дифференциальным магнитометром | 2021 |
|
RU2789143C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ТРЕХКОМПОНЕНТНОГО ДАТЧИКА МАГНИТОМЕТРА ОТНОСИТЕЛЬНО МЕРЫ МАГНИТНОГО МОМЕНТА | 2005 |
|
RU2290657C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИНДУКЦИИ ГЕОМАГНИТНОГО ПОЛЯ С ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2236029C1 |
| Способ калибровки трехкомпонентного магнитометра | 2017 |
|
RU2654073C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВНЕШНЕЙ ПОМЕХИ В ЦЕНТРЕ МЕРЫ МАГНИТНОЙ ИНДУКЦИИ | 2008 |
|
RU2394251C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ ДИПОЛЬНОЙ МОДЕЛИ | 2012 |
|
RU2521134C2 |
| СПОСОБ КАЛИБРОВКИ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2012 |
|
RU2497139C1 |
Изобретение относится к поверке магнитоизмерительных систем, в том числе предназначенных для поиска ферромагнитных объектов, без демонтажа входящих в систему магнитометрических средств. Трехкомпонентную меру магнитного момента ориентируют вдоль осей координат системы поиска, устанавливают на некотором расстоянии от системы и задают компоненты радиус-вектора от центра системы координат до центра меры. Затем воздействуют на систему полем заданного магнитного момента, воспроизводимого мерой, и по показаниям бортовых магнитометрических средств определяют (косвенно измеряют) координаты источника магнитного поля и компоненты его магнитного момента. После этого определяют погрешности всей системы как разности между измеренными и заданными величинами, а также определяют погрешности каждого магнитометрического средства. Техническим результатом заявленного способа является определение погрешностей системы поиска с учетом погрешностей, вносимых носителем этой системы. 1 ил., 2 табл.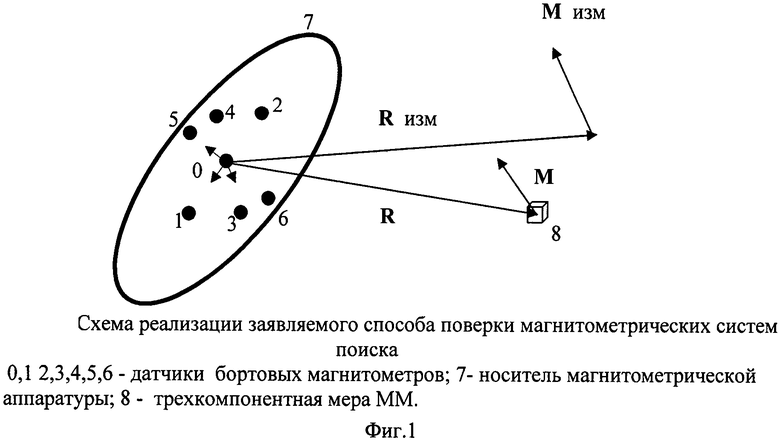
Способ поверки магнитоизмерительных приборов с помощью дипольной меры магнитного момента, расположенной на фиксированном расстоянии от поверяемого объекта, отличающийся, тем, что датчиками магнитометров, размещенными на штатных местах системы поиска источников магнитного поля, измеряют приращения индукции магнитного поля относительно опорного датчика, а трехкомпонентную меру магнитного момента ориентируют вдоль осей системы координат поиска, затем стандартным средством измеряют радиус-вектор между центром системы координат и центром меры, воспроизводят мерой некоторый магнитный момент, по которому рассчитывают, а также измеряют соответствующие приращения индукции, по которым косвенно измеряют радиус-вектор к источнику и его магнитный момент, после чего определяют погрешности измерений как разности измеренных и заданных величин с учетом погрешностей, вносимых носителем, на котором расположены поверяемые приборы.
| СПОСОБ ПОВЕРКИ МАГНИТОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 1990 |
|
RU2010257C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ПОВЕРКИ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 2006 |
|
RU2428708C2 |
| US 7382129 B2, 03.06.2008 | |||
| US 8280189 В2, 02.10.2012. | |||

