Изобретение относится к области размещения вооружения на подвижном носителе и может быть использовано для запуска ракет с наземного, морского или воздушного подвижного носителя, например вертолета.
Известно устройство для запуска ракеты с вертолета [1], включающее прицел стрелка-оператора с датчиками углов и угловой скорости линии визирования в двух взаимно ортогональных плоскостях, подключенный к датчикам блок формирования сигнала разрешения пуска ракеты, включатель сигнала «Пуск», коммутатор цепи пуска ракеты, соединенный с включателем сигнала «Пуск» и выходом блока формирования сигнала разрешения пуска ракеты, сигнализатор разрешения пуска ракеты стрелка-оператора, соединенный с выходом блока формирования сигнала разрешения пуска ракеты, и индикатор углового отклонения линии визирования прицела стрелка-оператора для пилота, соединенный со вторым и третьим выходами блока формирования сигнала разрешения пуска ракеты.
Это устройство позволяет производить запуск ракет с неподвижной пусковой установки, жестко ориентированной относительно продольной оси подвижного носителя, при отсутствии прямой видимости цели водителем подвижного носителя, например, пилотом летательного аппарата.
Сигнал разрешения пуска ракеты формируется в нем при условии:
где αгор, βверт - угловые отклонения линии визирования (ЛВ) прицела стрелка-оператора в двух взаимно ортогональных плоскостях (в горизонтальной и вертикальной плоскостях соответственно) относительно "нулевого" направления ЛВ, при котором сигналы с датчиков ее углового положения равны нулю (в частности, относительно продольной оси подвижного носителя, если "нулевое" направление ЛВ совпадает с направлением его продольной оси);
ωгор, ωверт - угловые скорости перемещения ЛВ в двух взаимно ортогональных плоскостях (горизонтальной и вертикальной плоскостях соответственно);
Δtну - время неуправляемого полета ракеты - время полета ракеты с момента старта до момента начала формирования ее бортовой системой управления команд управления рулевым органом по сигналам рассогласования между ракетой и ЛВ. Сигналы рассогласования формируются бортовой системой управления ракеты по сигналам, поступающим с устройства ее наведения (оптического пеленгатора с устройством передачи сигналов наведения на борт ракеты, лазерной или радиолокационной систем наведения);
φ, ψ - максимальные допустимые угловые значения, в пределах которых обеспечивается заданная минимальная дальность боевого применения комплекса управляемого ракетного вооружения, размещенного на подвижном носителе.
Входящий в состав данного устройства блок формирования сигнала разрешения пуска ракеты, соединенный с коммутатором цепи пуска ракеты и индикатором разрешения пуска ракеты стрелка-оператора, правильней было бы назвать блоком формирования сигнала разрешения пуска ракеты по угловому положению ЛВ прицела стрелка-оператора. Он действительно формирует сигнал разрешения пуска ракеты, но лишь по одному признаку - по признаку нахождения ЛВ прицела стрелка-оператора в разрешенной для пуска ракеты угловой зоне, задаваемой формулами (1). При этом подразумевается, что на пусковой установке (ПУ) находится ракета и готово к работе (исправно) устройство наведения ракеты. Однако первое из этих условий - наличие ракеты на выбранной ПУ - не всегда выполняется автоматически.
Дело в том, что на подвижном носителе, как правило, размещаются несколько ПУ (как вариант, одна ПУ с несколькими направляющими для установки ракет). При этом в различных вариантах боевой загрузки подвижного носителя, который может быть оснащен и другими видами вооружения кроме управляемых ракет, ракеты могут быть установлены не на всех из них, а лишь на некоторых. Кроме того, в боевых условиях часть из изначально установленных ракет или даже все ракеты могут быть израсходованы ранее - до момента принятия стрелком-оператором решения на применение ракеты для поражения конкретной выбранной цели.
Второе условие также может не выполняться, поскольку устройство наведения ракеты (например, оптический пеленгатор с устройством передачи сигналов наведения на ракету, лазерная или радиолокационная система наведения) может выйти из строя к моменту принятия стрелком-оператором решения на применение ракеты, в частности - в результате боевого повреждения аппаратуры, носителя или последствий этого повреждения.
Поэтому рациональнее выдавать на индикатор стрелка-оператора совокупную или интегральную информацию о разрешении пуска ракеты, учитывающую выполнение трех этих условий (нахождение ЛВ прицела стрелка-оператора в разрешенной для пуска ракеты угловой зоне, наличие ракеты на выбранной ПУ и исправность устройства наведения ракеты). Нет смысла выдавать на индикатор стрелка-оператора информацию о разрешении пуска ракеты, если на выбранной ПУ ракеты нет. Эта, в данном случае ложная, информация лишь введет в заблуждение стрелка-оператора, который безрезультатно будет пытаться осуществить пуск ракеты, инициируя включатель сигнала "Пуск", что, очевидно, будет снижать скорострельность, а, стало быть, и эффективность комплекса управляемого ракетного вооружения, установленного на подвижном носителе. Пуск же ракеты при неисправном устройстве наведения ракеты приведет к потере ракеты и невыполнению боевой задачи.
Использование других индикаторов для предоставления стрелку-оператору информации о наличии ракеты на ПУ и готовности к работе (исправности) устройства наведения ракеты усложняет работу стрелка-оператора, который при подготовке к пуску ракеты в боевой обстановке должен принимать во внимание информацию с трех индикаторов, отвлекаясь от наблюдения за полем боя и слежения за уже выбранной целью, и также будет снижать скорострельность комплекса управляемого ракетного вооружения, установленного на подвижном носителе. Ввести же, например, в визир оптического прицела информацию с трех индикаторов, которая не затеняла бы часть изображения местности, не ухудшала бы качество видимости местности и в то же время могла бы различаться и восприниматься периферийным зрением оператора без затруднений, практически невозможно.
К недостаткам данного устройства, выбранного в качестве прототипа, также можно отнести то, что в нем не учитывается удаленность ПУ от устройства наведения ракеты (до 3-4 м), определяемая компоновкой комплекса управляемого ракетного вооружения на конкретных типах подвижных носителей. Обычно пусковые установки располагаются по бортам подвижного носителя, т.е. справа и слева от прицела стрелка-оператора и устройства наведения ракеты, размещающихся либо на продольной оси подвижного носителя, либо на пренебрежительно малом расстоянии от нее. Такое расположение ПУ относительно устройства наведения ракеты, поле зрения которого имеет небольшой угловой размер, приводит к возрастанию дальности вывода ракет на линию визирования цели. В результате это ведет к снижению точности стрельбы по близко расположенным целям, а, стало быть, и эффективности комплекса управляемого ракетного вооружения, установленного на подвижном носителе. В некоторых случаях стартовавшая ракета может не попасть в поле зрения устройства ее наведения, ориентированного в направлении ЛВ прицела стрелка-оператора. Поэтому при значительном разнесении ПУ и устройства наведения ракеты целесообразно разворачивать поле зрения устройства наведения ракеты (например, плоскопараллельные следящие пластины пеленгатора), нормально ориентированное в направлении ЛВ прицела стрелка-оператора, в сторону ПУ на определенный угол для обеспечения попадания ракет в поле зрения устройства наведения. Указанный разворот может осуществляться по сигналу с датчика идентификации борта подвижного носителя (правого или левого), на котором расположена ПУ. При появлении ракеты в поле зрения устройства наведения оно переходит в режим слежения за ракетой и формирования сигналов наведения ракеты по ее угловым рассогласованиям с направлением ЛВ прицела стрелка-оператора.
Целью изобретения является повышение эффективности комплекса управляемого ракетного вооружения, установленного на подвижном носителе, за счет предотвращения потери ракет при значительном разнесении ПУ и устройства наведения ракеты.
Для достижения технического результата предлагается устройство для запуска ракеты с подвижного носителя, включающее прицел с датчиками углов и угловой скорости линии визирования в двух взаимно ортогональных плоскостях, подключенный к датчикам блок формирования сигнала разрешения пуска ракеты по угловому положению линии визирования прицела, соединенный с индикатором углового положения линии визирования прицела, пусковую установку с датчиком наличия ракеты, устройство наведения ракеты, блок формирования интегрального сигнала разрешения пуска ракеты, входы которого подключены к блоку формирования сигнала разрешения пуска ракеты по угловому положению линии визирования прицела, датчику наличия ракеты пусковой установки и устройству наведения ракеты соответственно, последовательно соединенные включатель сигнала «Пуск» и блок формирования сигнала пуска ракеты, второй вход которого подключен к выходу блока формирования интегрального сигнала разрешения пуска ракеты, индикатор разрешения пуска ракеты, подключенный к выходу блока формирования интегрального сигнала разрешения пуска ракеты, и датчик идентификации борта, подключенный к устройству наведения ракеты.
На фиг.1 приведена функциональная схема заявляемого устройства.
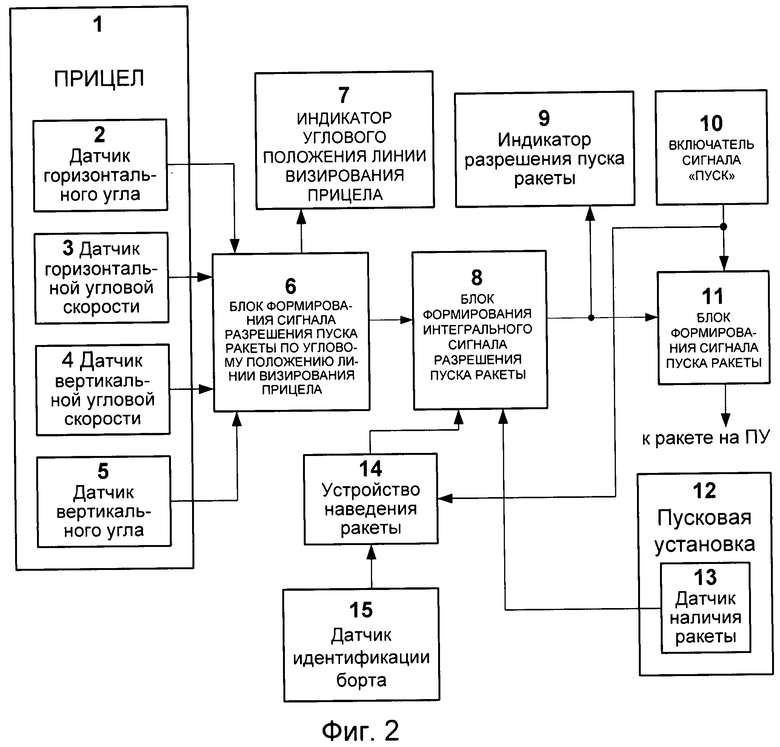
На фиг.2 приведена функциональная схема заявляемого устройства при осуществлении разворота поля зрения устройства наведения ракеты по сигналу с включателя сигнала «Пуск».
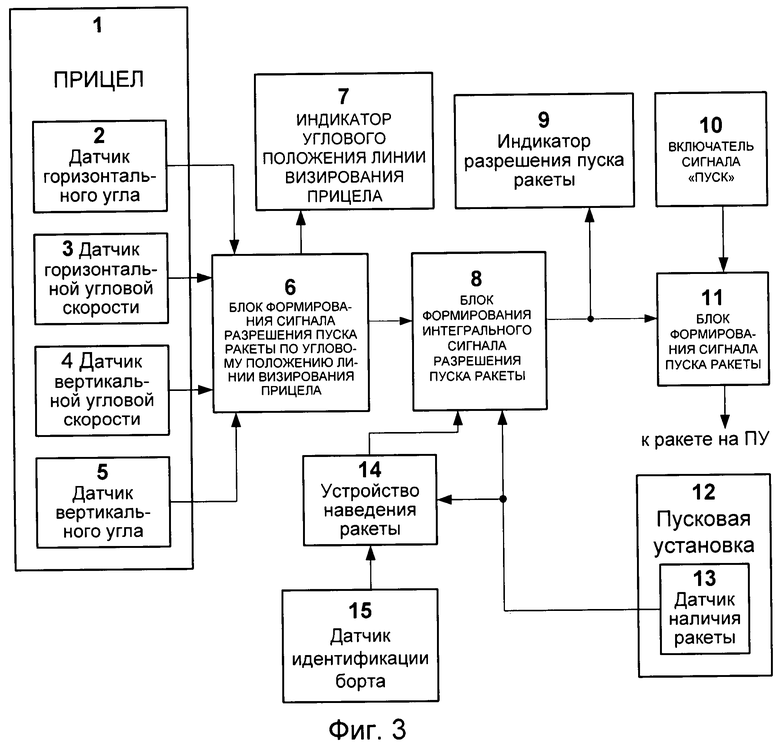
На фиг.3 приведена функциональная схема заявляемого устройства при осуществлении разворота поля зрения устройства наведения ракеты по сигналу с датчика наличия ракеты пусковой установки (по старту ракеты).
На каждой из фиг.1, 2, 3 представлены прицел 1 с датчиками углов 2, 5 и угловой скорости 3, 4 линии визирования в двух взаимно ортогональных плоскостях, блок формирования сигнала разрешения пуска ракеты по угловому положению линии визирования прицела 6, индикатор углового положения линии визирования прицела 7, блок формирования интегрального сигнала разрешения пуска ракеты 8, индикатор разрешения пуска ракеты 9, включатель сигнала «Пуск» 10, блок формирования сигнала пуска ракеты 11, пусковая установка 12 с датчиком наличия ракеты 13, устройство наведения ракеты 14 и датчик идентификации борта 15.
Устройство функционирует следующим образом. Сигналы с датчиков углового положения 2, 5 и угловой скорости 3, 4 ЛВ в каждой из двух взаимно ортогональных плоскостей поступают в блок формирования сигнала разрешения пуска ракеты по угловому положению линии визирования прицела 6. С выхода блока формирования сигнала разрешения пуска ракеты по угловому положению линии визирования прицела 6 сигналы угловых отклонений ЛВ в двух взаимно ортогональных плоскостях с поправками на упреждение, в случае наличия угловых скоростей ЛВ в этих плоскостях, поступают на вход индикатора углового положения линии визирования прицела 7, обеспечивая водителя подвижного носителя необходимой визуальной информацией для совмещения направления движения подвижного носителя с направлением ЛВ (т.е. с направлением на выбранную стрелком-оператором цель) с требуемой точностью. Когда ЛВ прицела 1 окажется в разрешенной для пуска ракеты угловой зоне, на выходе блока формирования сигнала разрешения пуска ракеты по угловому положению линии визирования прицела 6 будет сформирован сигнал разрешения пуска ракеты по данному признаку, поступающий далее на вход блока формирования интегрального сигнала разрешения пуска ракеты 8. На два других входа блока формирования интегрального сигнала разрешения пуска ракеты 8 поступают сигнал с датчика наличия ракеты 13 пусковой установки 12 и сигнал готовности к работе (исправности) устройства наведения ракеты 14 соответственно. При условии готовности к работе (исправности) устройства наведения ракеты 14, наличия ракеты на выбранной стрелком-оператором пусковой установке 12 и нахождении ЛВ прицела в разрешенной для пуска ракеты угловой зоне на выходе блока формирования интегрального сигнала разрешения пуска ракеты 8 формируется интегральный сигнал разрешения пуска ракеты, поступающий далее на вход блока формирования сигнала пуска ракеты 11, обеспечивая возможность формирования этим блоком запальных импульсов для запуска ракеты по нажатию стрелком-оператором включателя сигнала «Пуск» 10, и на индикатор разрешения пуска ракеты 9. При появлении на индикаторе разрешения пуска ракеты 9 символа разрешения пуска стрелок-оператор производит пуск ракеты нажатием включателя сигнала «Пуск» 10.
По сигналам, поступающим с датчика идентификации борта 15, поле зрения устройства наведения ракеты 14 разворачивается от направления ЛВ вправо или влево в сторону борта, на котором расположена ПУ, на определенный угол. Поскольку период времени между моментом выбора борта, с которого предполагается произвести пуск ракеты, и собственно пуском может оказаться довольно продолжительным, с целью экономии ресурса следящей системы устройства наведения ракеты изменение ориентации поля зрения (разворот) можно осуществлять по сигналу пуска ракеты с включателя сигнала «Пуск» 10 или по старту ракеты, информация о котором поступает с датчика наличия ракеты 13 пусковой установки 12. Сигналы идентификации борта, пуска и старта ракеты могут поступать в устройство наведения ракеты 14 с датчика идентификации борта 15, включателя сигнала «Пуск» 10 и датчика наличия ракеты 13, как в аналоговом, так и в цифровом виде, в частности в цифровом последовательном коде.
При появлении ракеты в поле зрения устройства наведения 14 (например, светового пятна бортового инфракрасного маяка ракеты на фотоприемнике оптического пеленгатора) следящая система устройства наведения ракеты переходит в режим слежения за ракетой и формирования сигналов наведения ракеты по ее угловым рассогласованиям с направлением ЛВ прицела 1.
В качестве прицела 1 или в соответствии с используемой в настоящее время терминологией обзорно-прицельной системы (поскольку представляет собой не просто оптическое визирное устройство, а сложную систему, включающую в себя, например, стабилизатор, дальномер, обзорную систему, имеющую в своем составе до трех обзорных каналов (телевизионный, тепловизионный, оптический), частично (оптический пеленгатор) или полностью (лазерная система наведения) устройство наведения ракеты) может быть использован, например, оптический прицел с гиростабилизированным головным зеркалом.
В качестве датчиков углового положения ЛВ 2, 5 могут быть использованы, например, трансформаторные датчики типа СКТ225Д.
В качестве датчиков угловой скорости ЛВ 3, 4 могут быть использованы, например, потенциометры рукояток пульта наведения прицела, задающие скорость перемещения гиростабилизированного головного зеркала прицела, т.е. оптической оси или линии визирования.
Блок формирования сигнала разрешения пуска ракеты по угловому положению линии визирования прицела 6 может быть выполнен, например, в соответствии с функциональной схемой блока формирования сигнала разрешения пуска ракеты, приведенной в описании устройства [1], с дополнительным включением в ее состав аналого-цифрового преобразователя и контроллера для передачи информации об угловых отклонениях ЛВ прицела в двух взаимно ортогональных плоскостях на вход индикатора углового положения линии визирования прицела 7 в цифровом последовательном коде.
В качестве индикатора углового положения линии визирования прицела 7 может быть использован, например, телевизионный индикатор водителя подвижного носителя, на котором индицируется, например, в виде прямоугольника, угловая зона разрешенного пуска ракет. Положение ЛВ маркируется определенным символом, например, перекрестием, перемещающимся по экрану телевизионного индикатора в зависимости от изменения углового положения ЛВ.
Блок формирования интегрального сигнала разрешения пуска ракеты 8 может включать в себя, например, контроллер и логическую схему «И». Сигнал готовности устройства наведения ракеты 14 к работе (исправности) в цифровом последовательном коде поступает с информационного выхода устройства наведения ракеты 14 в контроллер и далее в виде сигнала логического уровня на один из входов схемы «И». На два других входа схемы «И» поступают соответственно сигналы с блока формирования сигнала разрешения пуска ракеты по угловому положению линии визирования прицела 6 и с датчика наличия ракеты 13 пусковой установки 12. При этом интегральный сигнал разрешения пуска ракеты будет формироваться на выходе блока 8 только при выполнении всех трех условий - при нахождении ЛВ прицела в пределах разрешенной для пуска ракеты угловой зоны, наличии ракеты на пусковой установке 12 и готовности к работе (исправности) устройства наведения ракеты 14.
В качестве индикатора разрешения пуска ракеты 9 может быть использован, например, светодиод, введенный в окуляр прицела. Излучение светодиода фиксируется периферийным зрением стрелка-оператора.
Включатель сигнала «Пуск» 10 может быть реализован, например, в виде пусковой кнопки.
Блок формирования сигнала пуска ракеты 11 может быть выполнен, например, в виде последовательно соединенных коммутатора и формирователя импульса (импульсов) нормированной длительности для инициирования запальных цепей ракеты. При этом сигнальный вход коммутатора соединен с включателем сигнала «Пуск», а его управляющий вход - с выходом блока формирования интегрального сигнала разрешения пуска ракеты.
В качестве пусковой установки 12 с датчиком наличия ракеты 13 может быть использована, например, штатная авиационная пусковая установка АПУ-4/4 с четырьмя направляющими для установки ракет. При установке ракеты на направляющую происходит замыкание одного из контактов пускового разъема направляющей на корпус АПУ-4/4, связанный с корпусом подвижного носителя, с которым, в свою очередь, связаны корпуса всех блоков радиоэлектронной аппаратуры, установленной на подвижном носителе. При выборе стрелком-оператором той или иной направляющей сигнал «Корпус», поступающий с этого контакта в блок формирования интегрального сигнала разрешения пуска ракеты, будет являться информационным, указывающим на наличие ракеты на данной направляющей. При старте ракеты с направляющей контакт размыкается, прерывая поступление сигнала «Корпус» в блок формирования интегрального сигнала разрешения пуска ракеты 8, что свидетельствует об отсутствии ракеты на данной направляющей.
В качестве устройства наведения ракеты 14 может быть использован, например, оптический пеленгатор маяка инфракрасного спектрального диапазона, установленного на ракете, с радиолинией связи. Пеленгатор определяет угловые отклонения маяка ракеты относительно собственной оптической оси, выверенной с направлением ЛВ, преобразуемые далее в соответствии с выбранным законом управления в сигналы наведения ракеты. Радиолиния связи транслирует сформированные сигналы наведения на борт ракеты. В ней сигналы наведения подвергаются время-импульсной модуляции и в виде мощных радиоимпульсов сверхвысокой частоты излучаются антенной радиолинии в направлении ЛВ.
По сигналам, поступающим с датчика идентификации борта 15 в аналоговом или цифровом виде, плоскопараллельные следящие пластины пеленгатора разворачивают поле зрения пеленгатора в сторону выбранного борта на определенный угол, например, максимально возможный, определяемый предельным углом поворота следящих пластин пеленгатора. При появлении светового пятна бортового инфракрасного маяка ракеты на фотоприемнике оптического пеленгатора последний переходит в режим слежения за ракетой и формирования сигналов наведения ракеты по угловым рассогласованиям ее бортового инфракрасного маяка с направлением ЛВ прицела стрелка-оператора 1 (сигналами угловых рассогласований являются сигналы с датчиков углового отклонения плоскопараллельных следящих пластин пеленгатора относительно исходного направления поля зрения пеленгатора, совпадающего с направлением ЛВ). С целью экономии ресурса следящей системы пеленгатора (двигателей и редукторов следящих пластин) разворот плоскопараллельных следящих пластин может осуществляться по сигналу пуска ракеты с включателя сигнала «Пуск» 10, либо по старту ракеты, информация о котором поступает с датчика наличия ракеты 13 пусковой установки 12.
В качестве датчика идентификации борта 15 может быть использован, например, коммутирующий двухпозиционный переключатель, подключенный к источнику опорного напряжения и к общему проводу этого источника (к корпусу). При этом в одном положении переключателя в устройство наведения ракеты 14 поступает опорное напряжение с источника, а в другом - нулевой сигнал «Корпус», идентифицируемые устройством наведения как признаки борта (правого или левого), на котором расположена ПУ.
Источники информации
1. Патент России №2087831, 1995, МПК F41G 3/22, В64D 7/08.
Изобретение относится к области размещения ракетного вооружения на подвижных носителях и может быть использовано, например, при запуске ракет с летательного аппарата. Технический результат - расширение функциональных возможностей. Для достижения данного результата устройство содержит прицел с датчиками углов и угловой скорости линии визирования в двух взаимно ортогональных плоскостях, подключенный к датчикам блок формирования сигнала разрешения пуска ракеты по угловому положению линии визирования прицела, соединенный с индикатором углового положения линии визирования прицела, пусковую установку с датчиком наличия ракеты, устройство наведения ракеты, блок формирования интегрального сигнала разрешения пуска ракеты, входы которого подключены к блоку формирования сигнала разрешения пуска ракеты по угловому положению линии визирования прицела, датчику наличия ракеты пусковой установки и устройству наведения ракеты соответственно, последовательно соединенные включатель сигнала «Пуск» и блок формирования сигнала пуска ракеты. 2 з.п. ф-лы, 3 ил.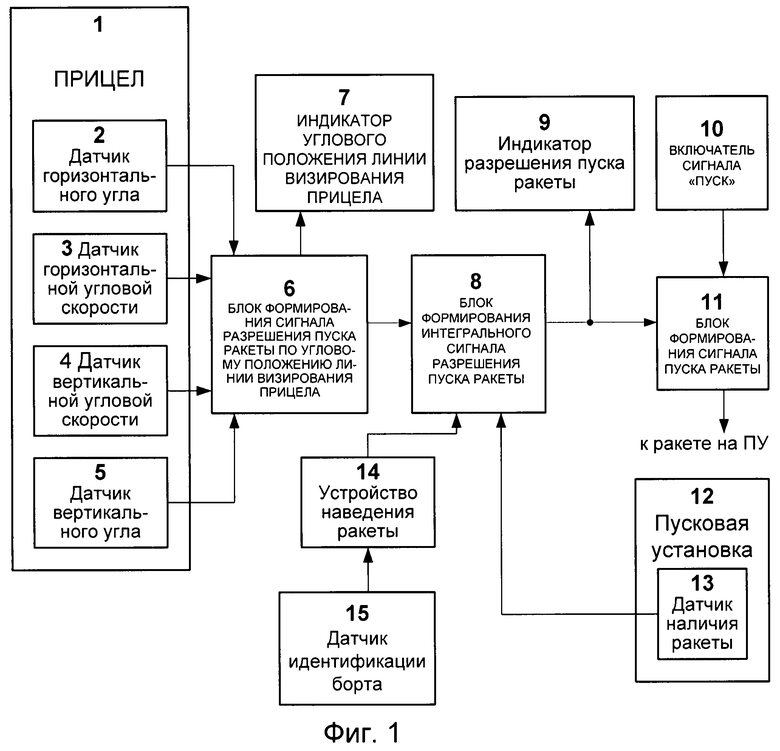
1. Устройство для запуска ракеты с подвижного носителя, включающее прицел с датчиками углов и угловой скорости линии визирования в двух взаимно ортогональных плоскостях, подключенный к датчикам блок формирования сигнала разрешения пуска ракеты по угловому положению линии визирования прицела, соединенный с индикатором углового положения линии визирования прицела, пусковую установку с датчиком наличия ракеты, устройство наведения ракеты, блок формирования интегрального сигнала разрешения пуска ракеты, входы которого подключены к блоку формирования сигнала разрешения пуска ракеты по угловому положению линии визирования прицела, датчику наличия ракеты пусковой установки и устройству наведения ракеты соответственно, последовательно соединенные включатель сигнала «Пуск» и блок формирования сигнала пуска ракеты, второй вход которого подключен к выходу блока формирования интегрального сигнала разрешения пуска ракеты, и индикатор разрешения пуска ракеты, подключенный к выходу блока формирования интегрального сигнала разрешения пуска ракеты, и датчик идентификации борта, подключенный к устройству наведения ракеты.
2. Устройство по п.1, отличающееся тем, что устройство наведения ракеты подключено к включателю сигнала «Пуск».
3. Устройство по п.1, отличающееся тем, что устройство наведения ракеты подключено к датчику наличия ракеты пусковой установки.
| УСТРОЙСТВО ДЛЯ ЗАПУСКА РАКЕТЫ С ВЕРТОЛЕТА | 1995 |
|
RU2087831C1 |
| СПОСОБ ВЫРАЩИВАНИЯ СЪЕДОБНЫХ ГРИБОВ LENTINUS EDODES | 2003 |
|
RU2239983C1 |
| US 4173785 A1, 06.11.1979 | |||
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2241195C1 |
| Приспособление для предупреждения преждевременного спадания монет с весового коромысла автоматов | 1930 |
|
SU22991A1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ АППАРАТУРЫ УПРАВЛЯЕМОЙ РАКЕТЫ И АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2289781C1 |
| СПОСОБ ВВОДА РАКЕТЫ В ЗОНУ ЛУЧА И КОМПЛЕКС ТЕЛЕУПРАВЛЯЕМОЙ В ЛУЧЕ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2257522C1 |

