Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано при разработке ракетных комплексов с лучевыми системами теленаведения, в которых траектория полета ракеты, например, близка и параллельна поверхности земли либо водной поверхности.
Известен способ ввода ракеты в зону луча и комплекс управляемой ракеты, его реализующий. Известный способ ввода ракеты в зону луча [1] заключается в том, что применяют на стартовом участке комбинацию "широкого" и "узкого" луча, а ввод ракеты производят по истечении определенного времени с момента старта и при заданных начальных условиях, т.е. командах по курсу и тангажу, которые вводят ракету в зону луча, после чего управляют системой теленаведения. Комплекс управляемой ракеты [1] содержит ракету (например, телеориентируемую в луче), в которую входят элементы электромеханической стыковки ракеты, автопилот и последовательно включенные приемник и блок выделения координат, а также пункт управления, в который входят устройство управления стартом и последовательно соединенные аппаратура кодирования по курсу и тангажу и передатчик, а также пусковое устройство (пусковую установку), в которую входит устройство электромеханической стыковки, при этом устройство управления стартом электрически связано через устройство электромеханической стыковки пусковой установки с элементами электромеханической стыковки ракеты (до момента старта), а с момента ввода ракеты в зону луча приемник связан электромагнитным излучением с передатчиком. При этом блок выделения координат и входная часть автопилота представляют собой бортовую аппаратуру ракеты системы радиотеленаведения по лучу, а элементы и устройство электромеханической стыковки представляют собой электромеханические цепи [1].
Начальные условия ввода ракеты в луч определяются ошибками прицеливания, в том числе линейным отклонение ракеты от равносигнальной зоны в момент перехода к теленаведению, при этом ошибки прицеливания приводят к возникновению переходного процесса при вводе ракеты в зону луча. Длительность переходного процесса и длина стартового участка в "широком" луче определяют величину минимально допустимой дальности наведения.
Следовательно, недостатком известных способа и устройства является большая величина минимально допустимой дальности наведения из-за стартового участка в "широком" луче и ошибками, обусловленными линейным отклонением ракеты от равносигнальной зоны по курсу и тангажу в момент перехода к теленаведению.
Задачей настоящего изобретения является уменьшение минимально допустимой дальности наведения за счет оптимизации начальных условий, приводящих к минимизации ошибок наведения, что не требует применения на стартовом участке комбинации "широкого" и "узкого" луча.
Поставленная задача решается в способе ввода ракеты в зону луча за счет того, что на ракете с момента старта формируют программно изменяемую команду управления по тангажу, а при вводе ракеты в зону луча управляют системой теленаведения, при этом в горизонтальной плоскости совмещают направления линии старта ракеты и луча с нулевыми значениями командных сообщений, в вертикальной плоскости выставляют направление линии старта ракеты по углу выше направления луча с нулевыми значениями командных сообщений, а управляют системой теленаведения с момента попадания ракеты в зону луча с нулевыми значениями командных сообщений в вертикальной плоскости, при этом ракету закручивают по углу крена.
Комплекс управляемой ракеты, основанный на этом способе (первый вариант), содержит ракету, в которую входят элементы электромеханической стыковки ракеты, автопилот и последовательно включенные приемник и блок выделения координат, а также пункт управления, в который входят прицел-прибор наведения и устройство управления стартом, которое подключено через устройство электромеханической стыковки пусковой установки к элементам электромеханической стыковки ракеты, при этом приемник связан электромагнитным излучением с прицелом-прибором наведения; на ракете введены блок задержки и последовательно включенные формирователь стартового импульса, формирователь изменяемой команды и сумматор, при этом выходы по курсу и тангажу блока выделения координат соединены соответственно с первым и вторым входами блока задержки, выход блока задержки по курсу соединен с первым входом автопилота, выход блока задержки по тангажу подключен ко второму входу сумматора, выход сумматора подключен ко второму входу автопилота, а третий вход блока задержки соединен с выходом формирователя стартового импульса, вход которого подключен к элементам электромеханической стыковки ракеты.
Комплекс телеуправляемой в луче ракеты, основанный на этом способе (второй вариант), содержит ракету, в которую входят элементы электромеханической стыковки ракеты, автопилот, приемник и блок выделения координат, выход по курсу которого соединен с первым входом автопилота, пункт управления, в который входят прицел-прибор наведения и устройство управления стартом, которое электрически связано через устройство электромеханической стыковки пусковой установки с элементами электромеханической стыковки ракеты, при этом приемник связан электромагнитным излучением с прицелом-прибором наведения; на ракете введены блок задержки и последовательно включенные формирователь стартового импульса, формирователь изменяемой команды и сумматор, при этом выход приемника подключен к первому входу блока задержки, выход которого соединен со входом блока выделения координат, выход по тангажу блока выделения координат подключен ко второму входу сумматора, выход которого соединен со вторым входом автопилота, второй вход блока задержки соединен с выходом формирователя стартового импульса, вход которого подключен к элементам электромеханической стыковки ракеты.
Заявленный способ реализуется следующим образом. В горизонтальной плоскости совмещают направления линии старта ракеты и луча с нулевыми значениями командных сообщений, формируемых в пространстве электромагнитным излучением с пункта управления.
Поскольку луч, например, сканируют относительно цели в вертикальном и горизонтальном направлениях и, соответственно, изменяют величину командного сообщения от максимального значения до минимального, то вдоль прямой линии, соединяющей прицел-прибор наведения и цель, командные сообщения по курсу “Z” и тангажу “Y” равны нулю, т.е. эта линия является по сути равносигнальной зоной при радиотеленаведении, а само определение "луч с нулевыми значениями командных сообщений" является по сравнению с определением "равносигнальная зона" более полным, поскольку включает в себя как вращение луча вокруг оси ("равносигнальная зона"), так и сканирование луча в вертикальном и горизонтальном направлениях.
Совмещение значений командных сообщений в горизонтальной плоскости направлений линии старта ракеты и луча с нулевыми осуществляют конструктивно, например, выполнением пусковой установки, на которой крепится ракета, и пункта управления в виде единого агрегата, что легко осуществимо, например, при использовании оптического сигнала связи, т.е. оптического поля управления, формируемого на пункте управления, при этом команду ввода ракеты в луч по курсу “Z” формировать не требуется.
В вертикальной плоскости выставляют направление линии старта ракеты по углу выше направления луча с нулевыми значениями командных сообщений с учетом величины программно изменяемой команды управления по тангажу “Y”. Поскольку ракета совершает полет над поверхностью земли, то на нее действует сила земного притяжения, направленная по вертикали вниз, что вызывает отклонение ракеты от своего первоначального направления. Таким образом, превышение угла старта ракеты и программно изменяемую команду управления ракетой по тангажу, компенсирующие земное притяжение, выбирают такими, чтобы они обеспечили ввод ракеты в зону луча сверху на минимальной дальности ракеты от места старта.
После ввода ракеты сверху в зону луча управление системой теленаведения начинают с момента попадания ракеты в луч с нулевыми значениями командных сообщений в вертикальной плоскости, при этом за момент попадания принимают, например, момент нахождения центра тяжести ракеты в луче с нулевыми значениями командных сообщений по тангажу “Y”, что конкретно определяется из динамических параметров ракеты и траектории вхождения ее сверху в луч. Положение ракеты (ее центра тяжести) определяется, например, местом расположения приемника на ракете и величиной координаты по тангажу “Y” на выходе блока выделения координат, с учетом угла наклона ракеты при вхождении ее в зону луча.
Для уменьшения ошибок ввода в луч, обусловленных ракетой, ракету с момента старта, например, уже в контейнере закручивают по углу крена. Кроме того, например, до момента начала управления системой теленаведения, после пуска ракеты пространственное положение луча не изменяют.
Таким образом, величина ошибки ввода ракеты в луч в момент начала управления системой теленаведения в горизонтальной плоскости (по курсу) практически сведена к нулю, а в вертикальной плоскости (по тангажу) ее можно выполнить достаточно малой, например, путем контроля величины координаты по тангажу, что отмечалось выше.
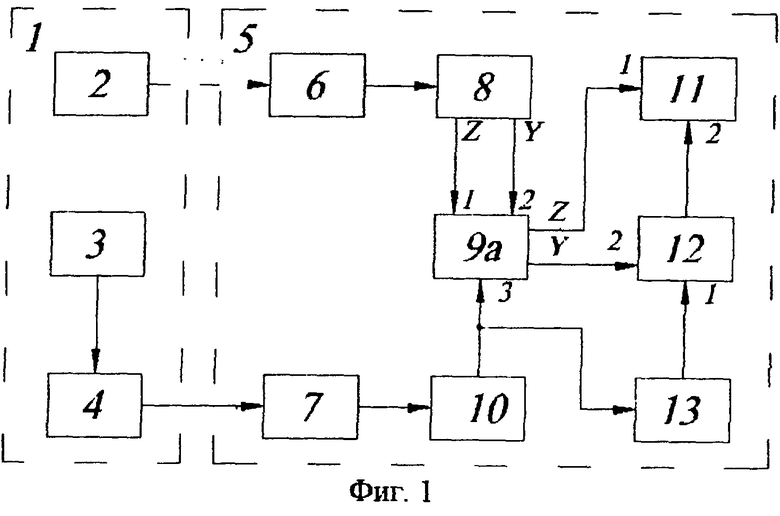
Предлагаемое изобретение поясняется чертежами (фиг.1, 2, 3, 4, 5 и 6). На фиг.1, 2 изображены соответственно первый и второй варианты электрических структурных схем комплексов телеуправляемых в луче ракет, где 1 - пункт управления, 2 - прицел-прибор наведения, 3 - устройство управления стартом, 4 - устройство электромеханической стыковки пусковой установки, 5 - ракета, 6 - приемник, 7 - элементы электромеханической стыковки ракеты, 8 - блок выделения координат, 9а и 9б - блоки задержки, 10 - формирователь стартового импульса, 11 - автопилот, 12 - сумматор, 13 - формирователь изменяемой команды.
На фиг.3 изображена электрическая схема блока задержки 9а (пример выполнения для первого варианта устройства), где 14 и 16 - компараторы, 15 и 17 - RS-триггеры, 18 - мультиплексор, Eпор1 и Епор2 - величины напряжений порогов срабатывания.
На фиг.4 изображена электрическая схема блока задержки 9б (пример выполнения для второго варианта устройства), где 19 - RS-триггер, 20 - счетчик импульсов, 21 - генератор импульсов, 22 - логическая схема “И”.
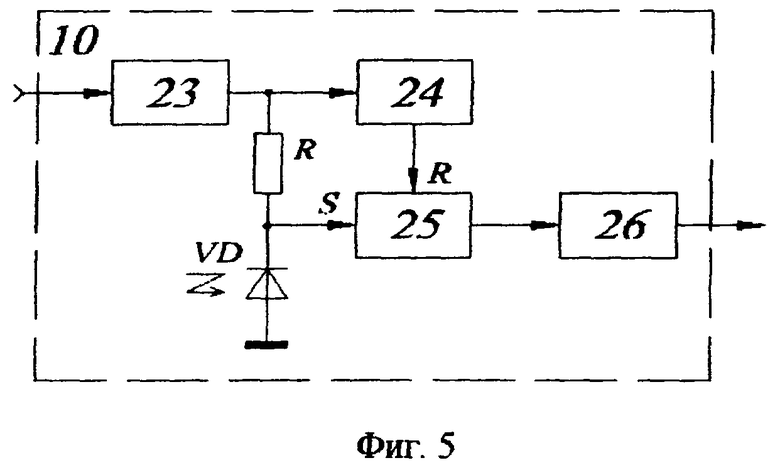
На фиг.5 изображена электрическая схема формирователя стартового импульса 10 (пример выполнения), где 23 - бортовой источник питания, 24 - формирователь импульсов, 25 - RS-тригтер, 26 - ждущий мультивибратор, R - резистор, VD - фотодиод.
На фиг.6 приведен пример ввода ракеты в луч по тангажу “Y” и соответствующие ему эпюры сигналов, где на а) стрелками изображена траектория движения ракеты, а заштрихованная область - луч системы теленаведения, центральная линия которого (пунктир) соответствует нулевым значениям командных сообщений, б) - сигнал на входах "R" RS-триггеров 15 и 17, в) - сигнал на выходе компаратора 14, г) - сигнал на выходе RS-триггера 15, д) - сигнал на выходе компаратора 16, е) - сигнал на выходе RS-триггера 17.
Заявленный комплекс телеуправляемой в луче ракеты (первый вариант) содержит ракету 5, в которой последовательно включены приемник 6 и блок выделения координат 8. На пункте управления 1 устройство управления стартом 3 подключено через устройство электромеханической стыковки пусковой установки 4 к элементам электромеханической стыковки ракеты 7. Приемник 6 связан электромагнитным излучением с прицелом-прибором наведения 2. На ракете 5 последовательно включены формирователь стартового импульса 10, формирователь изменяемой команды 13 и сумматор 12. Выходы по курсу “Z” и тангажу “Y” блока выделения координат 8 соединены соответственно с первым и вторым выходами блока задержки 9а. Выход блока задержки 9а по курсу “Z” соединен с первым входом автопилота 11. Выход блока задержки 9а по тангажу “Y” подключен ко второму входу сумматора 12. Выход сумматора 12 подключен ко второму входу автопилота 11, третий вход блока задержки 9а соединен с выходом формирователя стартового импульса 10, вход которого подключен (например, относительно корпуса) к элементам электромеханической стыковки ракеты 7.
Заявленный комплекс телеуправляемой в луче ракеты (второй вариант) содержит ракету 5, в которой выход по курсу “Z” блока выделения координат 8 соединен с первым входом автопилота 11. Устройство управления стартом 3 на пункте управления 1 электрически связано через устройство электромеханической стыковки пусковой установки 4 с элементами электромеханической стыковки ракеты 7. Приемник 6 связан электромагнитным излучением с прицелом-прибором наведения 2. На ракете 5 последовательно включены формирователь стартового импульса 10, формирователь изменяемой команды 13 и сумматор 12. Выход приемника 6 подключен к первому входу блока задержки 9б, выход которого соединен со входом блока выделения координат 8. Выход по тангажу “Y” блока выделения координат 8 подключен ко второму входу сумматора 12, выход которого соединен со вторым входом автопилота 11.
Второй вход блока задержки 9б соединен с выходом формирователя стартового импульса 10, вход которого подключен к элементам электромеханической стыковки ракеты 7.
Прицел-прибор наведения 2 в лучевой системе теленаведения, например, с оптическим каналом связи выполняет ту же функцию, что и радиовизир с управляющим прибором в известном устройстве и может быть выполнен в виде передающего прибора, формирующего пространственную структуру электромагнитного поля, параметры которого функционально связаны с координатами соответствующих точек в системе декартовых координат “Z0Y”, где “Z” - величина координаты по курсу, “Y” - величина координаты по тангажу, “0” - начало координат (эквивалентно равносигнальной зоне в известном устройстве) и является точкой прицеливания.
Таким образом, прицельную марку (прицел) оптически юстируют с началом координат, т.е. с “0”. Формирование поля управления осуществляют поочередным сканированием диаграммы направленности луча в двух взаимно перпендикулярных направлениях по “Z” и “Y”, при этом пропорционально углу сканирования относительно “0” изменяют знак и величину команд. Изменение величин команд производят, например, по закону времяимпульсной модуляции (ВИМ), причем проекция диаграммы направленности луча на картинную плоскость при сканировании ее по горизонтали (канал курса “Z”) вытянута в виде тонкой полоски по вертикали, а при сканировании по вертикали (канал тангажа “Y”) - по горизонтали. При этом передающий тракт можно выполнить как передающий тракт радиолинии с ВИМ без амплитудной модуляции (AM) [1].
Устройство управления стартом 3 можно выполнить, например, в виде ключа "Старт", при нажатии которого подается напряжение с источника питания пункта управления 1. Устройство электромеханической стыковки пусковой установки 4 и элементы электромеханической стыковки ракеты 7 можно выполнить в виде разрывного разъема.
Приемник 6, блок выделения координат 8 можно выполнить как приемный тракт радиолинии [1] без AM. Автопилот 11 можно выполнить как обычный автопилот [1] с учетом вращения ракеты по крену [2].
Формирователь изменяемой команды 13 может быть выполнен (в цифровом виде) на программно-запоминающем устройстве, в котором предварительно записаны N значений величин команд, каждое из которых соответствует своему входному числу, величину которого определяет текущее время, т.е. его можно выполнить в виде последовательно включенных таймера и микросхемы, например, 556РТ7, при этом таймер может быть выполнен как последовательно включенные генератор импульсов 21 и счетчик импульсов 20, аналогично как в блок задержки 96 на фиг.4, с той лишь разницей, что сигнал на выходе счетчика импульсов 20 имеет не один разряд, а n, где 2n=N.
Примеры выполнения блоков задержки 9а и 9б, а также формирователя стартового импульса 10 приведены соответственно на фиг.3, 4 и 5, где компаратор 14 без стробирования, компаратор 16 со стробированием, например, микросхемы 521СА3, 521СА4, RS-триггеры 15, 17, 19 и 25 - микросхемы 564ТМ2, мультиплексор 18 - микросхема 564КП1 (двухканальная), счетчик импульсов 20 - микросхема 564ИЕ10. Генератор импульсов 21 выполнен как кварцованный по частоте генератор импульсов. Логическая схема “И” 22, например микросхема 564ЛА7. Бортовой источник питания 23, например батарея. Формирователь импульсов 24, например дифференцирующая RC-цепочка. Ждущий мультивибратор 26 - обычный (классический) ждущий мультивибратор.
Заявленное устройство, приведенное на фиг.1, работает следующим образом. В исходном положении ракета 5 расположена, например, на ферме пусковой установки и подключена через элементы электромеханической стыковки ракеты 7 и устройство электромеханической стыковки пусковой установки 4 к устройству управления стартом 3. Прицельная марка прицела-прибора наведения 2 наводится на цель оператором путем поворота пусковой установки, на которой механически закреплен прицел-прибор наведения 2 и ракета 5, при этом, как отмечалось ранее, в горизонтальной плоскости совмещены направления линии старта ракеты и луча с нулевыми значениями командных сообщений, формируемых прицелом-прибором наведения 2, а в вертикальной плоскости выставлено направление линии старта ракеты по углу выше направления луча с нулевыми значениями командных сообщений. При нажатии оператором ключа "Старт" на борт ракеты поступает электрическое напряжение с устройства управления стартом 3. С помощью этого напряжения в автопилоте 11 раскручивают ротор гироскопа, а затем разарретируют его рамки (на фиг.1 эта связь не приведена, т.к. она несущественна), и в формирователе стартового импульса 10 запускают бортовой источник питания 23, в момент выхода которого на рабочий режим формируют разовый импульс формирователем импульса 24. Этот импульс по входу "R" устанавливает в исходное (нулевое) состояние RS-триггер 25, после чего сигнал с устройства управления стартом 3 производит запуск двигательной установки и ракета сходит с пусковой установки, при этом уже с момента старта ракета начинает вращаться по крену и датчик крена, формирующий сигнал крена ψ·sinγ и ψ·cosγ [2] (выполненный в виде, например, оптронных пар светодиод-фотодиод, разделенных кодовым диском [3], ось которого закреплена на оси подвижной рамки гироскопа), начинает формировать креновые импульсы. Таким образом, ток, протекающий через фотодиод VD (фиг.5), начинает формировать импульсы напряжения на резисторе R, передний фронт первого из которых устанавливает по входу "S" RS-триггера 25 на его выходе единичный логический уровень. Переброс RS-тригтера из нулевого логического состояния в единичное запускает ждущий мультивибратор 26, который формирует импульс (эпюра б на фиг.6).
Поскольку момент начала вращения ракеты по крену совпадает с моментом старта ракеты, то формирователь стартового импульса 10 формирует одиночный разовый импульс в момент схода ракеты с пусковой установки. Импульс с выхода формирователя стартового импульса 10 поступает на третий вход блока задержки 9а и выставляет по входам "R" RS-триггеров 15 и 17 на их выходах нулевой логический уровень, который запрещает прохождение сигналов с выходов "Z" и "Y" блока выделения координат 8 через мультиплексор 18 на автопилот 11.
Таким образом, на автопилот 11 (его второй вход) поступает только команда по тангажу “Y” с формирователя изменяемой команды 13 (через сумматор 12). Запуск формирователя изменяемой команды 13 производится стартовым импульсом с выхода формирователя 10. Эта команда изменяется во времени с момента старта и обеспечивает оптимальный ввод ракеты 5 в зону луча сверху (фиг.6а).
Одновременно или с задержкой с момента нажатия ключа "Старт" включается прицел-прибор наведения 2. Ракета сверху входит (вводится) в зону луча (фиг, 6а), формируемого прицелом-прибором наведения 2, при этом приемник 6 преобразует электромагнитное излучение с прибора 2 в электрический сигнал, усиливает его и нормирует по амплитуде и длительности. Этот сигнал (ВИМ импульсы) поступает на блок выделения координат 8. Поскольку с момента старта и до момента ввода ракеты 5 в зону луча направления линии старта ракеты и луча совмещены в горизонтальной плоскости с нулевыми значениями командных сообщений, то величина координаты по курсу “Z” (напряжение ей соответствующее) равна нулю, а величина сигнала координаты по тангажу “Y”, прямо пропорциональная величине отклонения ракеты от нулевых значений командных сообщений в луче, уменьшается из-за ввода ракеты сверху.
Оба сигнала (по курсу “Z” и тангажу “Y”) с выхода блока выделения координат 8 поступают соответственно на первый и второй входы блока задержки 9а, при этом на вход компаратора 14 поступает сигнал по тангажу “Y”, который сравнивается с величиной порогового напряжения Eпор1. На траектории полета ракеты 0...А (фиг.6а) величина напряжения по тангажу “Y” на выходе блока выделения координат равна нулю. На интервале А...В она изменяется от максимального значения до нулевого. Поэтому величину Eпор1 выбирают такой, чтобы она равнялась величине напряжения на втором входе блока задержки 9а, соответствующего точке Б (фиг.6а). Таким образом, компаратор 14 сформирует разовый импульс, равный временному расстоянию между точками А и Б (эпюра в на фиг.6). Из этого импульса RS-триггер 15 формирует перепад напряжения из логического нуля в единицу (эпюра г на фиг.6), который поступает на вход стробирования компаратора 16 и разрешает ему сравнивать величину Епор2 с величиной сигнала на втором входе. При, например, Епор2=0 В и величине сигнала координаты “Y” на втором входе компаратора, соответствующего точке В, т.е. нулю, компаратор 16 срабатывает и формирует импульс, длительность которого определяется положением ракеты ниже нулевых значений командных сообщений (эпюра д на фиг.6). Из переднего фронта этого импульса RS-триггер 17 формирует разовый перепад напряжения из логического нуля в логическую единицу (эпюра е на фиг.6). Уровень напряжения с логической единицей с выхода RS-триггера 17 сохраняется до конца полета ракеты и разрешает прохождение сигналов по курсу “Z” и тангажу “Y” на выход мультиплексора 18 с блока выделения координат 8.
Сигнал по курсу “Z” с выхода блока задержки 9а поступает на первый вход автопилота 11, а сигнал по тангажу “Y” - на второй вход сумматора 12, где он суммируется с сигналом с формирователя изменяемой команды 13 и просуммированный поступает на второй вход автопилота 11.
Как следует из эпюры е на фиг.6, блок задержки 9а задерживает сигналы по курсу “Z” и тангажу “Y” с выхода блока выделения координат 8 на время tзад, обеспечивая тем самым оптимальный момент начала управления ракеты системой теленаведения, при этом величина tзад=var.
Комплекс телеуправляемой в луче ракеты (фиг.2, второй вариант выполнения) работает аналогично первому за исключением того, что сигнал с выхода приемника 6 поступает на вход блока выделения координат 8 через блок задержки 9б, который задает величину задержки включения управления tзад=const. Это требуется для обеспечения начала управления в момент вхождения ракеты в зону луча с нулевыми значениями командных сообщений и корректировки траектории полета по тангажу “Y”.
Следовательно, формирователь изменяемой команды 13 формирует программно изменяемую команду с момента старта ракеты, при этом величина этой команды определяется величиной скорости полета ракеты и ее массой, уменьшающейся из-за выгорания топлива. Величину скорости полета ракеты (υ) можно косвенно измерять по угловой скорости вращения ракеты по крену [4], например, как υ=p·(1/Т), где р - постоянный коэффициент, Т - период вращения по крену ракеты. Определяя текущее с начала старта ракеты время и измеряя температуру топлива, определяющую изменение скорости истечения продуктов горения из сопла двигательной установки, можно учитывать уменьшение массы ракеты, а по температуре топлива также изменение скорости полета ракеты υ.
Таким образом формирователь изменяемой команды 13 формирует поправочную команду в канале тангажа, которая изменяется во времени (как в первом варианте), а также эта команда изменяет свою величину в зависимости от скорости ракеты (при большой скорости полета она уменьшается, а при меньшей увеличивается).
В способе ввода ракеты в зону луча за счет того, что на ракете с момента старта формируют программно изменяемую команду управления по тангажу, а при вводе ракеты в зону луча управляют системой теленаведения, при этом в горизонтальной плоскости совмещают направления линии старта ракеты и луча с нулевыми значениями командных сообщений, в вертикальной плоскости выставляют направление линии старта ракеты по углу выше направления луча с нулевыми значениями командных сообщений, а управляют системой теленаведения с момента попадания ракеты в зону луча с нулевыми значениями командных сообщений в вертикальной плоскости, при этом ракету закручивают по углу крена, не требуется применения на стартовом участке комбинации "широкого" и "узкого" луча, что уменьшает минимально допустимую дальность наведения за счет оптимизации начальных условий.
Введение в комплексе телеуправляемой в луче ракеты на ракете блока задержки и последовательно включенных формирователя стартового импульса, формирователя изменяемой команды и сумматора, причем (первый вариант) выходы по курсу и тангажу блока выделения координат соединены соответственно с первым и вторым входами блока задержки, выход блока задержки по курсу соединен с первым входом автопилота, выход блока задержки по тангажу подключен ко второму входу сумматора, выход сумматора подключен ко второму входу автопилота, а третий вход блока задержки соединен с выходом формирователя стартового импульса, вход которого подключен к элементам электромеханической стыковки ракеты, либо (второй вариант) выход приемника подключен к первому входу блока задержки, выход которого соединен со входом блока выделения координат, выход по тангажу блока выделения координат подключен ко второму входу сумматора, выход которого соединен со вторым входом автопилота, второй вход блока задержки соединен с выходом формирователя стартового импульса, вход которого подключен к элементам электромеханической стыковки ракеты, уменьшило минимально допустимую дальность наведения за счет оптимизации начальных условий, приводящих к минимизации ошибок наведения.
Источники информации
1. "Основы радиоуправления" под ред. Вейцеля В.А. и Типугина В.Н. Москва, Сов. радио, 1973 г., стр.277-278, 30-31 рис.1.11, стр.276 рис.5.3, стр.247 рис.4.28, стр.49.
2. В.А.Павлов, С.А.Понырко, Ю.М.Хованский "Стабилизация летательных аппаратов и автопилоты". Высшая школа, Москва, 1964 г., стр.209 рис.6.11.
3. В.П.Демидов, Н.Ш.Кутыев "Управление зенитными ракетами", Москва, Военное издательство, 1989 г., стр.286-287 рис.10.4.
4. Патент России №2199715 от 27.02.03 г. МПК 7 F 42 B 15/01.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕОРИЕНТИРУЕМОЙ В ЛУЧЕ РАКЕТЫ И РАКЕТНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2266509C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241951C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241950C1 |
| СПОСОБ ВВОДА В ЗОНУ УПРАВЛЕНИЯ РАКЕТЫ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И РАКЕТНЫЙ КОМПЛЕКС | 2007 |
|
RU2362107C2 |
| СПОСОБ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ В ЛУЧЕ И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2421680C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2291384C1 |
| СПОСОБ ТЕЛЕНАВЕДЕНИЯ РАКЕТЫ ПО ЛУЧУ И СИСТЕМА ТЕЛЕНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2258888C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАРТОМ РАКЕТЫ И РАКЕТНЫЙ КОМПЛЕКС | 2005 |
|
RU2291382C1 |
| СПОСОБ КОРРЕКЦИИ КОМАНДНОГО СИГНАЛА НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2004 |
|
RU2280233C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2005 |
|
RU2289086C1 |




Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано при разработке ракетных комплексов с лучевыми системами теленаведения, в которых траектория полета ракеты, например, близка и параллельна поверхности земли либо водной поверхности. Технический результат - уменьшение минимально допустимой дальности наведения за счет оптимизации начальных условий, приводящих к минимизации ошибок наведения, что не требует применения на стартовом участке комбинации “широкого” и “узкого” луча. Согласно изобретению на ракете с момента старта формируют программно изменяемую команду управления по тангажу, а при вводе ракеты в зону луча управляют системой теленаведения. В горизонтальной плоскости совмещают направления линии старта ракеты и луча с нулевыми значениями командных сообщений. В вертикальной плоскости выставляют направление линии старта ракеты по углу выше направления луча с нулевыми значениями командных сообщений, а управляют системой теленаведения с момента попадания ракеты в зону луча с нулевыми значениями командных сообщений в вертикальной плоскости, при этом ракету закручивают по углу крена. Описаны два варианта комплекса телеуправляемой в луче ракеты. Первый вариант содержит ракету, в которую входят элементы электромеханической стыковки ракеты, автопилот и последовательно включенные приемник и блок выделения координат, а также пункт управления, в который входят прицел-прибор наведения и устройство управления стартом, которое подключено через устройство электромеханической стыковки пусковой установки к элементам электромеханической стыковки ракеты, при этом приемник связан электромагнитным излучением с прицелом-прибором наведения; на ракете установлены блок задержки и последовательно включенные формирователь стартового импульса, формирователь изменяемой команды и сумматор, при этом выходы по курсу и тангажу блока выделения координат соединены соответственно с первым и вторым входами блока задержки, выход блока задержки по курсу соединен с первым входом автопилота, выход блока задержки по тангажу подключен ко второму входу сумматора, выход сумматора подключен ко второму входу автопилота, а третий вход блока задержки соединен с выходом формирователя стартового импульса, вход которого подключен к элементам электромеханической стыковки ракеты. Второй вариант отличается от первого тем, что выход приемника подключен к первому входу блока задержки, выход которого соединен со входом блока выделения координат, выход по тангажу блока выделения координат подключен ко второму входу сумматора, выход которого соединен со вторым входом автопилота, второй вход блока задержки соединен с выходом формирователя стартового импульса, вход которого подключен к элементам электромеханической стыковки ракеты. 3 н.п. ф-лы, 6 ил.
| Основы радиоуправления | |||
| Под ред | |||
| ВЕЙЦЕЛЯ В.А | |||
| и ТИПУГИНА В.И | |||
| - М.: советское радио, 1973, с.30, 31, 276, 277 | |||
| СПОСОБ НАВЕДЕНИЯ | 1997 |
|
RU2118784C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |

