Предлагаемый способ наведения управляемой ракеты и система наведения для его реализации относятся к области разработки систем управления ракетами и могут быть использованы в противотанковых ракетных комплексах (ПТРК).
Наиболее близким к предлагаемому является способ наведения противотанковой ракеты, реализованный в ПТРК 9К114 “Конкурс” и взятый в качестве прототипа [1], включающий формирование широкого и узкого полей управления, запуск ракеты, наведение ракеты в течение времени t1 в широком поле управления в соответствии с угловым положением полезного источника излучения относительно линии визирования цели (ЛВЦ) и наведение ракеты в узком поле управления.
В данном способе наведения противотанковой ракеты реализуется командная полуавтоматическая система телеуправления. Оптико-механический пеленгатор (ОМП) определяет угловое отклонение ракеты относительно ЛВЦ по бортовому источнику излучения и на основе данного рассогласования наземная аппаратура управления (НАУ) формирует команду, передающуюся на борт управляемой ракеты по проводной линии связи (ПЛС). Управляемая ракета в момент старта имеет максимальные флуктуации относительно ЛВЦ и для обеспечения ее захвата в первые секунды полета и предотвращения срыва управления изначально в ОМП устанавливают широкое поле управления. По истечении времени t1, когда большинство переходных процессов в системе управления стабилизировались или приняли мало изменяющийся характер, в ОМП устанавливается узкое поле управления.
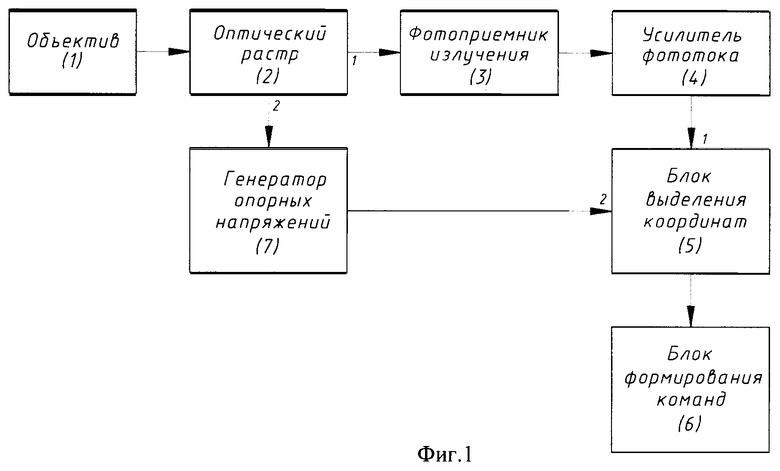
Наиболее близкой к предлагаемой является система наведения ракеты, реализующая известный способ наведения противотанковой ракеты и применяемая в ПТРК 9К114 “Конкурс” [2]. Эта система наведения содержит последовательно соединенные объектив, принимающий сигнал от бортового источника излучения, оптический растр, фотоприемник излучения, усилитель фототока, блок выделения координат и блок формирования команд, а также генератор опорных напряжений, подключенный между оптическим растром и блоком выделения координат.
Функциональная схема системы наведения ракеты, реализующей известный способ наведения противотанковой ракеты, приведена на фиг.1.
Система наведения ракеты работает следующим образом. Входным воздействием для системы наведения ракеты является угловое отклонение ракеты от линии прицеливания. Объектив (1), фокусирует изображение источника излучения на оптическом растре (2), который имеет прозрачные и непрозрачные сектора, расположенные радиально, и совершает плоскопараллельное перемещение (сканирование), что обеспечивает частотную модуляцию и пространственную селекцию светового потока бортового источника излучения. Частотно-модулированный световой поток воспринимается фотоприемником излучения (3) и преобразуется в соответствующие электрические сигналы. Частотно-модулированный сигнал с фотоприемника поступает в усилитель фототока (4), где усиливается до необходимого значения. Выходной сигнал с усилителя фототока содержит информацию об угловых отклонениях ракеты от линии прицеливания, которая поступает в блок выделения координат (5). После преобразования сигнала усилителя фототока блок выделения координат вырабатывает напряжения, соответствующие линейным отклонениям ракеты от линии прицеливания. В качестве опорных напряжений при фазовом детектировании используются сигналы с генератора опорных напряжений (7). Напряжения, пропорциональные отклонениям ракеты от линии прицеливания по курсу и тангажу, с выхода блока выделения координат поступают на блок формирования команд (6), где преобразуются в сигналы управления, предназначенные для передачи по ПЛС на ракету.
Известный способ наведения управляемой ракеты и система наведения, его реализующая, обладают рядом недостатков. В первую очередь сюда следует отнести необходимость обеспечения достаточно широкого начального поля управления ракетой, обусловленного максимальными флуктуациями управляемой ракеты относительно ЛВЦ. При этом необходимо обеспечить достаточно широкую полосу пропускания высокочастотного тракта, определяемую девиацией частотно-модулированного сигнала в условиях больших фоновых засветок и малого соотношения сигнал/шум, что существенно снижает точность выделения координат ракеты, при этом ухудшается помехозащищенность и уменьшается чувствительность всей системы управления.
Задачей предлагаемого изобретения является разработка такого способа наведения управляемой ракеты и системы наведения для его реализации, которые позволили бы повысить качество наведения ракеты в широком поле управления без изменения конструкции самой ракеты, а также обеспечили хорошую помехозащищенность всей системы управления без ее существенного усложнения.
Поставленная задача решается тем, что в способе наведения управляемой ракеты, включающем формирование широкого и узкого полей управления, запуск управляемой ракеты, наведение управляемой ракеты в течение времени t1 в широком поле управления в соответствии с угловым положением источника излучения относительно линии визирования, наведение ракеты в узком поле управления в соответствии с угловым положением источника излучения относительно линии визирования, до запуска управляемой ракеты определяют моменты времени tФ, tД1, tД2, tД3, при наведении управляемой ракеты в широком поле управления при достижении момента времени tФ ограничивают полосу пропускания усилителя фототока, при достижении момента времени tД1 осуществляют уменьшение телесного угла засветки фотоприемного элемента, при наведении ракеты в узком поле управления в моменты времени tД2 и tД3 также уменьшают телесный угол засветки фотоприемного элемента.
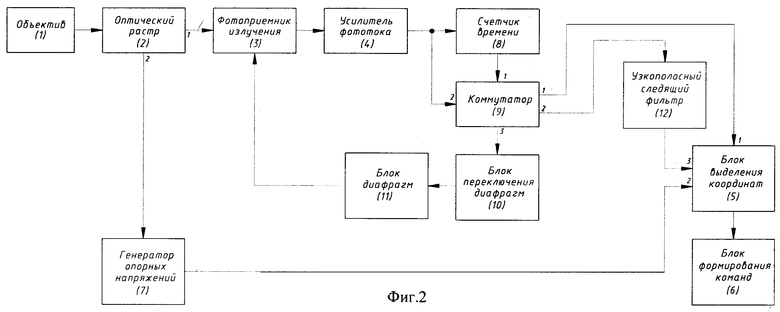
Поставленная задача решается также тем, что в системе наведения управляемой ракеты, содержащей последовательно соединенные объектив, оптический растр, фотоприемник излучения, усилитель фототока, последовательно соединенные блок выделения координат и блок формирования команд, а также генератор опорных напряжений, вход которого соединен со вторым выходом оптического растра, а выход - со вторым входом блока выделения координат, дополнительно введены счетчик времени, коммутатор, блок переключения диафрагм, блок диафрагм и узкополосный следящий фильтр, при этом выход усилителя фототока соединен со входом счетчика времени и вторым входом коммутатора, выход счетчика времени соединен с первым входом коммутатора, первый выход которого соединен с первым входом блока выделения координат, второй выход - со входом узкополосного следящего фильтра, третий выход - со входом блока переключения диафрагм, выход которого соединен со входом блока диафрагм, выход которого соединен с фотоприемником излучения, выход узкополосного следящего фильтра соединен с третьим входом блока выделения координат.
Сущность предлагаемого способа наведения заключается в следующем. Световой поток Р, падающий на входной зрачок оптической системы (ОС) в спектральном диапазоне ее работы, равен

где Ω – телесный угол  , под которым виден входной зрачок ОС из точки, в которой находится источник излучения;
, под которым виден входной зрачок ОС из точки, в которой находится источник излучения;
Kосл - приведенный коэффициент ослабления излучения бортового источника, характеризующий потери излучения бортового источника при пропускании ОС, атмосферы, а также учитывающий спектральную чувствительность фотоприемника излучения;
I(λ) - спектральная плотность силы излучения бортового источника излучения, Вт/ср·мкм;
D - расстояние до бортового источника излучения, м;
dвх - диаметр входного зрачка ОС, м.
Данный световой поток вызывает генерацию Nе электронов в фотоприемнике излучения
где Екв(λ) - энергия кванта, Вт
Соотношение количества электронов полезного сигнала Nе к количеству шумовых электронов фотоприемника излучения ΔNШ, обусловленных внутренними шумами фотоприемника излучения, в идеальном случае соотношение сигнал/шум всей ОС

где N - энергетический запас ОС в идеальном случае.
Но помимо полезного сигнала в телесный угол Ω попадает излучение фона, которое вызывает генерацию дополнительного числа шумовых электронов ΔNф
КФ - приведенный коэффициент ослабления излучения фона, характеризующий потери излучения фона при пропускании ОС, атмосферы, а также учитывающий спектральную чувствительность фотоприемника излучения;
IФ(λ) - приведенная спектральная плотность силы излучения фона, Вт/ср·мкм.
Таким образом, в реальных условиях управления ракетой текущее значение соотношения сигнал/шум ОС определяется из выражения
где Np - соотношение сигнал/шум ОС в зависимости от текущих параметров полета управляемой ракеты и уровня фоновых засветок.
В процессе полета управляемой ракеты световой поток от бортового источника излучения, падающий на входной зрачок ОС, уменьшается обратно пропорционально квадрату дальности до ракеты, тогда как уровень засветки фоном входного зрачка ОС и уровень внутренних шумов фотоприемника излучения практически не зависят от дальности полета управляемой ракеты. Таким образом, текущее значение соотношения сигнал/шум ОС Np постоянно уменьшается и, если не принять специальных мер, то может достичь критического значения, при котором возможен срыв управления ракетой.
В предлагаемом способе наведения предусмотрены механическая и электрическая корректировки уровня засветки фоном входного зрачка ОС. Введение в ОС диафрагм позволяет механически уменьшать телесный угол распространения излучения фона, что в свою очередь снижает общее количество шумовых электронов.
Применение узкополосного следящего фильтра, резонансная частота которого совпадает с частотой модуляции бортового источника излучения оптическим растром, позволяет производить частотную фильтрацию бортового источника. За счет нее обеспечивается селекция бортового источника излучения управляемой ракеты на фоне паразитных источников излучения, которые могут находиться в поле зрения ОС. Причем в процессе наведения ракеты на цель блок выделения координат постоянно корректирует резонансную частоту узкополосного следящего фильтра.
Моменты времени tФ, tД1, tД2, tД3 определяются эмпирическим способом и могут изменяться в зависимости от условий применения управляемой ракеты.
Функциональная схема системы наведения управляемой ракеты, реализующей предлагаемый способ наведения управляемой ракеты, приведена на фиг.2.
Система наведения управляемой ракеты работает следующим образом. Входным воздействием для нее является угловое отклонение ракеты относительно ЛВЦ. Объектив (1) фокусирует изображение источника излучения на оптическом растре (2), который имеет прозрачные и непрозрачные сектора, расположенные радиально, и совершает плоскопараллельное перемещение (сканирование), что обеспечивает частотную модуляцию и пространственную селекцию светового потока бортового источника излучения. Частотно-модулированный световой поток воспринимается фотоприемником излучения (3) и преобразуется в соответствующие электрические сигналы. Частотно-модулированный сигнал с фотоприемника излучения поступает в усилитель фототока (4), где усиливается до определенного значения. После того, как полетное время управляемой ракеты достигло определенной величины tФ, счетчик времени (8) через коммутатор (9) подключает к выходу усилителя фототока узкополосный следящий фильтр (12), средняя частота настройки которого соответствует мгновенному значению частоты частотно-модулированного сигнала при достаточно узкой полосе пропускания устройства наведения. Узкополосный фильтр обеспечивает электрическое сужение полосы пропускания всей системы наведения управляемой ракеты. Выходной сигнал с узкополосного фильтра содержит информацию об угловых отклонениях ракеты от линии прицеливания, которая поступает в блок выделения координат (5). После преобразования блок выделения координат вырабатывает напряжения, соответствующие линейным отклонениям ракеты от линии прицеливания. В качестве опорных напряжений при фазовом детектировании используются сигналы с генератора опорных напряжений (7). Напряжения, пропорциональные отклонению ракеты от линии прицеливания по курсу и тангажу, с выхода блока выделения координат поступают на блок формирования команд (6), где преобразуются в сигналы управления ракетой, предназначенные для передачи по ПЛС. Блок выделения координат вырабатывает также напряжение, которое подается на узкополосный фильтр для изменения его резонансной частоты, с частотой сканирования оптического растра. Для увеличения помехозащищенности и корректировки поля управления счетчик времени по прошествии времени соответственно tД1, tД2, tД3 после старта управляемой ракеты через коммутатор обеспечивает подключение блока переключения диафрагм (10), который, управляя блоком диафрагм (11), обеспечивает механическую корректировку поля управления и телесного угла засветки фоном излучения фотоприемного элемента последовательным вводом диафрагм определенной конструкции.
В предлагаемом устройстве наведения управляемой ракеты объектив, оптический растр, фотоприемник излучения, усилитель фототока, блок выделения координат, блок формирования команд, генератор опорных напряжений могут быть выполнены, как в прототипе. Коммутатор и блок переключения диафрагм могут быть выполнены на основе релейных устройств, а счетчик времени - на основе реле времени. Диафрагмы могут быть изготовлены из кольцевидных механических пластин различного диаметра, а узкополосный следящий фильтр может быть изготовлен с помощью элементов схемотехники или как в источнике [2].
Предлагаемый способ наведения управляемой ракеты и система наведения для его реализации по сравнению с прототипами позволяют достичь:
- обеспечения широкого поле зрения только на небольшой период времени, что позволяет избежать влияния фоновых засветок;
- применения минимального количества дополнительных блоков для обеспечения последовательного сужения поля управления;
- обеспечения высокой точности наведения ракеты без существенного усложнения аппаратуры управления;
- повышения помехозащищенности системы управления в целом.
Способ наведения управляемой ракеты проверен с большой эффективностью управляемыми пусками ПТРК "Метис-М".
Источники литературы
1. Пусковая установка 9П135. Техническое описание и инструкция по эксплуатации. - М.: Военное издательство, 1974 г. - прототип.
2. В.Д. Дудка, Ю.Л. Парфенов, М.В. Пальцев. Направление улучшения характеристик управляемого вооружения. Военный парад. Июль-август 2000 г., стр.44-46.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277690C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2290593C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2258887C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2282128C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277688C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2290592C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2282127C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277689C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2260161C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2539728C1 |
Изобретение относится к области разработки систем управления ракетами и может быть использовано в противотанковых ракетных комплексах (ПТРК). Технический результат - повышение качества наведения ракеты в широком поле управления без изменения конструкции самой ракеты, а также обеспечение помехозащищенности всей системы управления без ее существенного усложнения. В способе наведения управляемой ракеты, включающем формирование широкого и узкого полей управления, запуск управляемой ракеты, наведение управляемой ракеты в течение времени t1 в широком поле управления в соответствии с угловым положением источника излучения относительно линии визирования, наведение ракеты в узком поле управления в соответствии с угловым положением источника излучения относительно линии визирования, до запуска управляемой ракеты определяют моменты времени tФ, tД1, tД2, tД3. При наведении управляемой ракеты в широком поле управления при достижении момента времени tФ ограничивают полосу пропускания усилителя фототока, при достижении момента времени tД1 осуществляют уменьшение телесного угла засветки фотоприемного элемента, при наведении ракеты в узком поле управления в моменты времени tД2 и tД3 также уменьшают телесный угол засветки фотоприемного элемента. В системе наведения управляемой ракеты, содержащей последовательно соединенные объектив, оптический растр, фотоприемник излучения, усилитель фототока, последовательно соединенные блок выделения координат и блок формирования команд, а также генератор опорных напряжений, вход которого соединен со вторым выходом оптического растра, а выход - со вторым входом блока выделения координат, дополнительно введены счетчик времени, коммутатор, блок переключения диафрагм, блок диафрагм и узкополосный следящий фильтр, при этом выход усилителя фототока соединен со входом счетчика времени и вторым входом коммутатора. Выход счетчика времени соединен с первым входом коммутатора, первый выход которого соединен с первым входом блока выделения координат, второй выход - со входом узкополосного следящего фильтра, третий выход - со входом блока переключения диафрагм, выход которого соединен со входом блока диафрагм, установленных с возможностью механической корректировки телесного угла засветки фотоприемника излучения, выход узкополосного следящего фильтра соединен с третьим входом блока выделения координат. 2 н.п. ф-лы, 2 ил.
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| - М.: Военное издательство, 1975, с.11-13, 68-70 | |||
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2192605C2 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ И РАКЕТНЫЙ КОМПЛЕКС | 1997 |
|
RU2124177C1 |
| УСТРОЙСТВО ДЛЯ ИНДИКАЦИИ | 0 |
|
SU329523A1 |
| СПОСОБ ПОЛУЧЕНИЯ КОМПОЗИЦИОННЫХ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ НА ОСНОВЕ НИТРИДА КРЕМНИЯ | 2017 |
|
RU2647540C1 |
