Изобретение относится к оборонной технике и, в частности, к комплексным средствам контроля параметров управляемых ракет, например телеориентируемых в луче.
В настоящее время из-за высокого быстродействия и высокой степени доверия к полученным результатам контроля автоматизированные системы контроля заменяют обычную контрольно-проверочную аппаратуру ручного управления.
Известны способ контроля параметров управляемой ракеты, вращающейся по крену, и автоматизированная система контроля для его осуществления [Патент РФ №2243494 от 27.12.04 г, МПК7 F 42 B 15/00]. Способ контроля параметров управляемой ракеты, вращающейся по крену, включающий задачу имитирующих команд, сравнение текущих величин команд управления на рулевом приводе с предварительно заданными имитирующими значениями, оценку по результатам сравнения соответствия контролируемого параметра заданному значению, при этом одновременно с заданием имитирующих команд формируют имитирующий сигнал вращения ракеты по углу крена и подают его на датчик крена ракеты, при этом изменяют частоту имитирующего сигнала вращения ракеты по крену прямо пропорционально имитирующей скорости полета ракеты, в качестве имитирующих команд используют командные сообщения, которые модулируют, преобразовывают в электромагнитное излучение и подают на вход приемного тракта ракеты, причем командные значения задают в виде функции, имитирующей изменение положения ракеты относительно точки прицеливания.
Известная автоматизированная система контроля параметров управляемой ракеты, вращающейся по крену, состоящая из последовательно включенных приемника, аппаратуры разделения каналов и декодирования, преобразователя команд с датчиком крена и рулевым приводом, содержит блок контроля и имитатор командных сообщений, она снабжена имитатором сигнала вращения ракеты, а датчик крена выполнен в виде N оптронных пар светодиод - фотодиод, где N=1, ..., n, первые выводы светодиодов и фотодиодов соединены с корпусом, а вторые выводы через соответствующие резисторы соединены с источником питания, при этом вторые выводы N фотодиодов соединены соответственно с N входами блока контроля, (N+1)-й вход которого подключен ко входу рулевого привода, а (N+2)-й вход - к первому выходу имитатора командных сообщений, второй выход которого связан со входом приемника. При этом в состав блока контроля входит индикатор.
Таким образом, в известном техническом решении (патент РФ №2243494) декодируют текущие величины команд управления, т.е. релейный сигнал, поступающий на обмотки управления рулевого привода ракеты, который затем сравнивают с предварительно заданными имитирующими значениями команд.
Недостатком известного способа контроля параметров управляемой ракеты, вращающейся по углу крена, и автоматизированной системы контроля для его осуществления является наличие ошибок измерения, обусловленных точностью формирования имитирующих сигналов управления и точностью декодирования релейного сигнала.
Задачей настоящего изобретения является повышение точности контроля параметров за счет исключения влияния точности формирования имитирующих сигналов управления и точности декодирования релейного сигнала.
Поставленная задача решается за счет того, что в способе контроля параметров аппаратуры управляемой ракеты, при котором подают имитирующие сигналы управления на аппаратуру управляемой ракеты, а также одновременно синхронно подают имитирующие сигналы управления на блок формирования команд и сравнивают текущие значения величин команд управления с выходов аппаратуры управляемой ракеты и блока формирования команд соответственно по курсу и тангажу, при значениях команд управления на выходе блока формирования команд, равных заданым, и отличии их от соответствующих значений на выходе аппаратуры управляемой ракеты на величину, не превышающую величину допуска, принимают решение о работоспособности аппаратуры.
Автоматизированная система контроля параметров аппаратуры управляемой ракеты, содержащая индикатор и последовательно включенные имитатор сигналов управления и аппаратуру управляемой ракеты; в нее введены последовательно соединенные блок формирования команд и блок сравнения, при этом выход аппаратуры управляемой ракеты соединен со вторым входом блока сравнения, выход имитатора сигналов управления подключен к сигнальному входу блока формирования команд, а выход блока сравнения соединен со входом индикатора.
Дополнительно в автоматизированной системе контроля параметров аппаратуры управляемой ракеты второй выход аппаратуры управляемой ракеты соединен с тактовым входом блока формирования команд.
Заявленный способ реализуется следующим образом. Имитирующие сигналы управления, т.е. командные сообщения (сигналы), имитирующие наведение ракеты на цель по курсу и тангажу, а также, например, сигналы, имитирующие вращение ракеты по углу крена (в случае вращения ракеты по крену), подают на аппаратуру управляемой ракеты. Одновременно синхронно подают эти же имитирующие сигналы управления на блок формирования команд. Сравнивают текущие (изменяемые) значения команд управления с выходов аппаратуры управляемой ракеты и блока формирования команд по их величине, соответственно по курсу и тангажу, при этом при значениях команд управления на выходе блока формирования команд, равных заданным, и отличии их от соответствующих значений на выходе аппаратуры управляемой ракеты на величину, не превышающую величину допуска, принимается решение о работоспособности аппаратуры. Величина допуска может, например, устанавливаться разной для разного вида испытаний.
Таким образом, командные сообщения по курсу и тангажу, например сигналы с ВИМ, поступают одновременно и синхронно как на аппаратуру управляемой ракеты, так и на блок формирования команд, где из них формируют команды управления, которые без декодирования, например в виде релейного широтно-импульсного модулированного (ШИМ) сигнала, сравниваются, при этом ошибки ВИМ имеют одинаковую величину и одинаково сказываются на форме (скважности) релейного сигнала, тем самым они не оказывают влияния на точность измерения, т.к. взаимно компенсируются.
Предлагаемое изобретение поясняется чертежами (фиг.1, 2 и 3). На фиг.1 приведена структурная электрическая схема автоматизированной системы контроля параметров аппаратуры управляемой ракеты, где 1 - имитатор сигналов управления (ИСУ), 2 - аппаратура управляемой ракеты (АУР), 3 - блок формирования команд управления (БФК), 4 - блок сравнения (БС), 5 - индикатор (И).
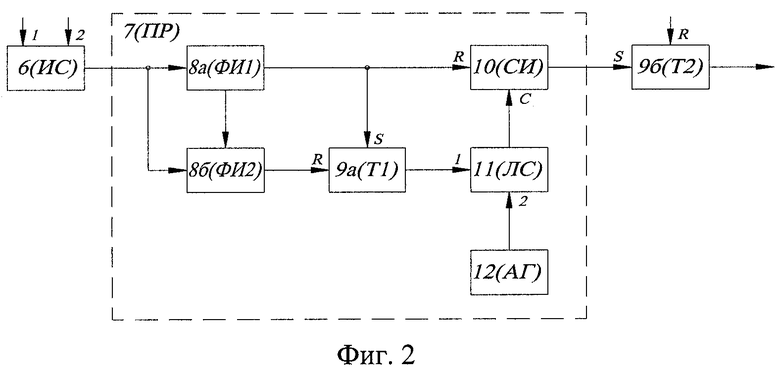
На фиг.2 приведена в качестве примера выполнения структурная электрическая схема блока сравнения 4, где 6 - логическая схема «исключающее ИЛИ» (ИС), 7 - преобразователь ″длительность - код″ (ПР), 8а и 8б - первый и второй формирователи импульсов соответственно (ФИ1 и ФИ2), 9а и 9б - первый и второй ″RS″-триггеры соответственно (Т1 и Т2), 10 - счетчик импульсов (СИ), 11 - логическая схема «ИЛИ» (ЛС), 12 - автогенератор (АГ).
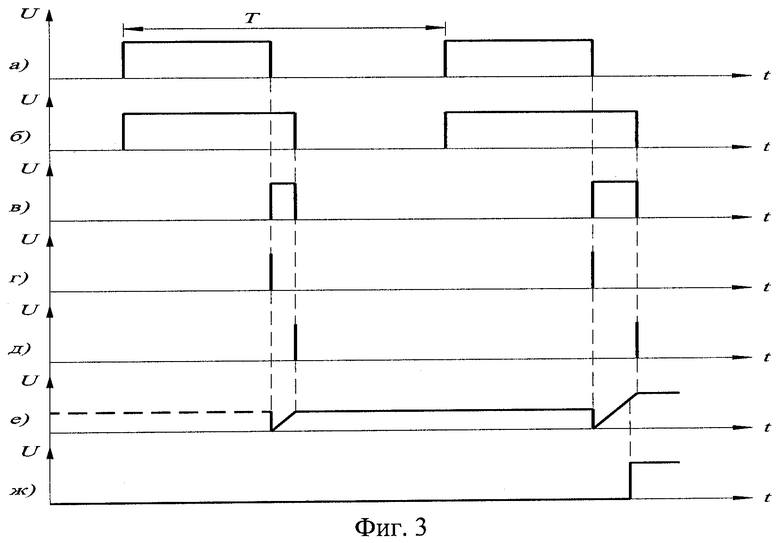
На фиг.3 приведены эпюры сигналов, где ″а″ - сигнал на первом входе блока сравнения 4, т.е. на первом входе логической схемы «исключающее ИЛИ» 6, "б" - сигнал на втором входе блока сравнения 4, т.е. на втором входе логической схемы «исключающее ИЛИ» 6, ″в″ - сигнал на выходе логической схемы «исключающее ИЛИ» 6, ″г″ - сигнал на выходе первого формирователя импульсов 8а, ″д″ - сигнал на выходе второго формирователя импульсов 8б, ″е″ - сигнал (в аналоговом виде) на выходе счетчика импульсов 10, "ж" - сигналы на выходе второго ″RS″-триггера 9б.
В автоматизированной системе контроля параметров аппаратуры управляемой ракеты последовательно включены имитатор сигналов управления 1, аппаратура управляемой ракеты 2 и блок сравнения 4. Сигнальный вход блока формирования команд 3 соединен с выходом имитатора сигнала управления 1, а выход блока формирования команд 3 подключен к первому входу блока сравнения 4, выход которого соединен со входом индикатора 5. Дополнительно тактовый вход блока формирования команд 3 может быть соединен с тактовым выходом аппаратуры управляемой ракеты 2 (на фиг.1 изображено пунктиром).
Имитатор сигналов управления 1 можно выполнить, например, как имитатор сигнала командных сообщений и сигнала вращения ракеты в прототипе (вместе). Аппаратура управляемой ракеты 2 может состоять из последовательно включенных приемника, аппаратуры разделения каналов и декодирования, преобразователя команд с датчиком крена и рулевым приводом и быть выполненной, как в прототипе. Блок формирования команд управления 3 может быть выполнен аналогично как аппаратура управляемой ракеты 2, при этом для уменьшения ошибок, обусловленных несинхронностью работы аппаратуры управляемой ракеты 2 и блока формирования команд 3, их работу можно полностью синхронизировать, для чего используют общий тактовый стабилизированный по частоте автогенератор импульсов, расположенный в аппаратуре управляемой ракеты 2, который можно использовать, например, в аппаратуре разделения каналов и декодирования, а также при формировании ШИМ релейного сигнала. Индикатор 5, например - светодиод.
Пример выполнения блока сравнения 4 приведен на фиг.2. Логическая схема «исключающее ИЛИ» 6, первый 9а и второй 9б ″RS″-триггеры, счетчик импульсов 10, логическая схема «И» - обычные цифровые микросхемы, например серии 564. Первый 8а и второй 8б формирователи импульсов, например ждущие мультивибраторы, автогенератор 12 - генератор стабилизированных по частоте импульсов.
Заявленная автоматизированная система контроля параметров аппаратуры управляемой ракеты работает следующим образом. В исходном состоянии, например, с помощью дифференцирующей цепочки в момент включения источника питания формируется разовый импульс, который по входу «R» устанавливает нулевой логический уровень на выходе второго ″RS″-триггера 9б (эпюра ″ж″ на фиг.3).
При формировании имитатором сигнала управления 1, например сигналов вращения ракеты по углу крена и подачи их на входы аппаратуры управляемой ракеты 2 и блока формирования команд 3, на них в один и тот же момент времени формируется сигнал начала работы аппаратуры управляемой ракеты 2 и блока формирования команд 3 за счет фиксации момента вращения [Патент РФ №2242698 МПК 4 F 41 G 7/24, F 41 B 15/00].
При подаче с имитатора сигналов управления 1 сигнала командных сообщений на входы аппаратуры управляемой ракеты 2 и блока формирования команд 3 на их выходах формируются релейные ШИМ сигналы (команды управления), аналогично как в прототипе [Патент РФ №2243494], которые приведены соответственно на эпюрах ″а″ и ″б″ фиг.3. Эти сигналы поступают на первый и второй входы логической схемы «исключающее ИЛИ» 6, на выходе которой формируются разностные импульсы (эпюра "в" на фиг.3). Длительности разностных импульсов равны разности длительностей входных сигналов, а их величина прямо пропорциональна величине ошибки в течение периода Т.
Разностные импульсы с выхода логической схемы «исключающее ИЛИ» 6 поступают на вход преобразователя ″длительность - код″ 7, т.е. на первый и второй формирователи импульсов соответственно 8а и 8б. Первый формирователь импульсов 8а формирует из переднего фронта импульс (эпюра ″г″ на фиг.3), который поступает на «R» вход счетчика импульсов 10 и устанавливает на его выходе (на всех разрядах) нулевой логически уровень (эпюра "е" на фиг.3, где изображен аналоговый сигнал). Одновременно импульс с выхода первого формирователя импульсов 8а поступает на «S» вход первого ″RS″-триггера 9а и устанавливает на его выходе единичный логический уровень, который поступает на первый вход логической схемы «И» 11 и разрешает прохождение импульсов с выхода автогенератора 12 на счетный вход «С» счетчика импульсов 10.
Счетчик импульсов 10 начинает счет количества импульсов, поступающих на его вход «С». Второй формирователь импульсов 8б формирует из заднего фронта входного импульса (эпюра "в" на фиг.3) импульс (эпюра ″д″ на фиг.3), который поступает на «R» вход первого "RS"-триггера 9а и устанавливает на его выходе нулевой логический уровень, который запрещает прохождение импульсов с выхода автогенератора 12 на счетный вход «С» счетчика импульсов 10. Счетчик импульсов 10 останавливает счет и хранит свое состояние до момента прихода следующего импульса, приведенного на эпюре ″г″ фиг.3, после чего весь процесс повторяется вновь.
Ранее был установлен по «R» входу на выходе второго "RS"-триггера 9б нулевой логический уровень. При появлении на выходе счетчика импульсов 10, например на его втором разряде единичного логического уровня (даже кратковременно), он поступит на «S» вход второго ″RS″-тригера 9б и установит на его выходе единичный логический уровень (эпюра "ж" на фиг.3), который поступит на индикатор 5 и включит его до конца процесса контроля параметров, что будет соответствовать браку.
Поскольку появление на выходном втором разряде счетчика импульсов 10 единичного логического уровня соответствует по длительности четырем периодам повторения импульсов на входе счетчика импульсов 10, то данная величина будет являться величиной допуска. Для исключения ошибки, обусловленной исходной фазой сигнала с выхода автогенератора 12, вместо него можно применить импульсный сигнал с тактового выхода аппаратуры управляемой ракеты 2.
Как следует из изложенного выше, для нормального функционирования заявленного технического решения требуется для подтверждения соответствия команд управления заданным значениям подвергать блок формирования команд 3 периодическим проверкам, например один раз в год. Эти разовые проверки можно проводить, например, обычными средствами контроля при весьма значительных затратах времени либо проверками в составе контура управления полетом ракеты на физико-математической модели при оценке характеристик (параметров) блока формирования команд 3 и т.д.
Таким образом, заявленная группа изобретений повышает точность контроля параметров управляемой ракеты.
Изобретение относится к оборонной технике и, в частности, к комплексным средствам контроля параметров управляемых ракет, например телеориентируемых в луче. Техническим результатом является повышение точности контроля параметров за счет исключения влияния точности декодирования релейного сигнала и точности формирования имитирующих сигналов управления. Предложен способ контроля параметров аппаратуры управляемой ракеты, в котором одновременно синхронно подают имитирующие сигналы управления на блок формирования команд и сравнивают текущие значения величин команд управления с выходов аппаратуры управляемой ракеты и блока формирования команд соответственно по курсу и тангажу, при значениях команд управления на выходе блока формирования команд, равных заданным, и отличии их соответствующих значений на выходе аппаратуры управляемой ракеты на величину, не превышающую величину допуска, принимают решение о работоспособности аппаратуры. Введение в автоматизированную систему контроля параметров аппаратуры управляемой ракеты последовательно соединенных блока формирования команд и блока сравнения повысило точность контроля параметров. 2 н. и 1 з.п. ф-лы, 3 ил.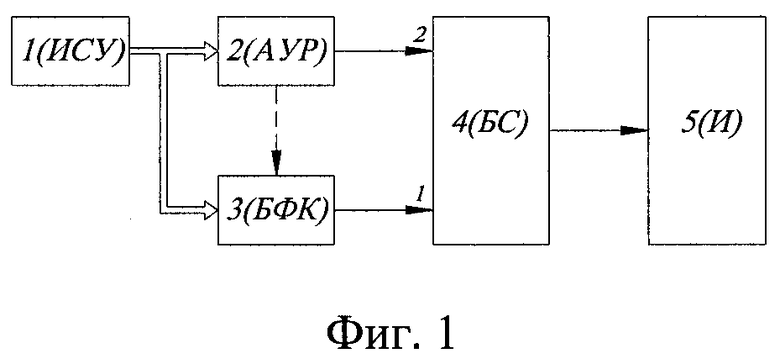
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ УПРАВЛЯЕМОЙ РАКЕТЫ, ВРАЩАЮЩЕЙСЯ ПО КРЕНУ, И АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2243494C2 |
| Система управления фрикционными гидромуфтами двухпоточной коробки передач транспортного средства | 1988 |
|
SU1532344A1 |
| СПОСОБ ГИБРИДНОЙ ЛАЗЕРНО-ДУГОВОЙ СВАРКИ ДЕТАЛЕЙ ИЗ АЛИТИРОВАННОЙ СТАЛИ С ПРОВОЛОКОЙ, СОДЕРЖАЩЕЙ ОБРАЗУЮЩИЕ ГАММУ-ФАЗУ ЭЛЕМЕНТЫ, И ГАЗОМ, СОДЕРЖАЩИМ МЕНЕЕ 10% АЗОТА ИЛИ КИСЛОРОДА | 2011 |
|
RU2588978C2 |
| DE 3310403 А1, 20.09.1984 | |||
| FR 2064386 А, 23.07.1971. | |||

