Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству измерения перемещения и к устройству измерения скорости, которые осуществляют бесконтактные измерения величины перемещения и скорости перемещения соответственно.
Предшествующий уровень техники
В качестве способа осуществления бесконтактной регистрации величины перемещения движущегося объекта известны следующие два способа. Один представляет собой способ облучения движущегося объекта когерентным светом для генерации спекл-структуры, обусловленной сложной интерференцией светового потока, полученного посредством отражения и расхождения света, для регистрации перемещения или скорости движущегося объекта на основании перемещения спекл-структуры в соответствии с перемещением движущегося объекта. Другой представляет собой способ облучения когерентными световыми пучками под углами падения, отличающимися друг от друга по отношению к движущемуся объекту, для получения скорости движущегося объекта на основании разности между доплеровскими сдвигами оптической частоты, которые принимаются во время отражения и расхождения. Однако вышеописанным способам свойственна проблема низкой надежности ЛД (лазерного диода) или VCSEL (лазера поверхностного излучения с вертикальным объемным резонатором), используемого в качестве источника когерентного света, высокой стоимости, связанной со сложной конфигурацией устройства, и т.п. Таким образом, в выложенной японской патентной заявке №58-113762 раскрыт способ использования источника некогерентного света для регистрации величины перемещения и скорости перемещения изображаемого объекта.
Однако в устройстве измерения скорости, раскрытом в выложенной японской патентной заявке №58-113762, изображение оптической картины на светопринимающем участке является нечетким, поскольку свет, отраженный от поверхности движущегося объекта, не проходит через систему формирования изображения. Таким образом, амплитуда сигнала, регистрируемого фотодиодной матрицей светопринимающего участка, низка, и отношение SN (сигнала к шуму), как целостность сигнала, снижается. В результате точность регистрации величины перемещения изображения оптической картины снижается и точность измерения скорости также снижается. С другой стороны, добавление в измерительное устройство системы формирования изображения, например линзы, для повышения четкости изображения оптической картины приводит к увеличению стоимости или препятствует уменьшению размера устройства по причине увеличения количества деталей.
Сущность изобретения
Задачей настоящего изобретения является обеспечение устройства измерения перемещения и устройство измерения скорости высокой точности.
Устройство измерения перемещения согласно одному аспекту настоящего изобретения измеряет величину перемещения движущегося объекта. Устройство измерения перемещения включает в себя источник света, выполненный с возможностью облучения движущегося объекта с использованием светового потока, излучаемого из светоизлучающей области; светопринимающий элемент, включающий в себя множество светопринимающих областей, расположенных в направлении перемещения движущегося объекта, причем светопринимающий элемент расположен так, что световой поток, излучаемый из светоизлучающей области, и световой поток, отражающийся от углублений в движущемся объекте, изображаются на светопринимающей поверхности светопринимающего элемента; и измерительный блок, выполненный с возможностью измерения величины перемещения движущегося объекта на основании величины перемещения изображения светоизлучающей области, которое формируется на светопринимающем элементе.
Устройство измерения скорости согласно другому аспекту настоящего изобретения включает в себя устройство измерения перемещения и скомпоновано для регистрации скорости движущегося объекта на основании величины перемещения движущегося объекта, определяемой устройством измерения перемещения в заранее определенное время.
Краткое описание чертежей
Признаки и аспекты настоящего изобретения следуют из нижеследующего описания вариантов осуществления, приведенного со ссылкой на прилагаемые чертежи, на которых:
Фиг.1 изображает схему конфигурации устройства измерения перемещения согласно варианту осуществления 1;
Фиг.2A - 2D изображают схемы, поясняющие принцип генерации изображения светоизлучающей области в устройстве измерения перемещения согласно варианту осуществления 1;
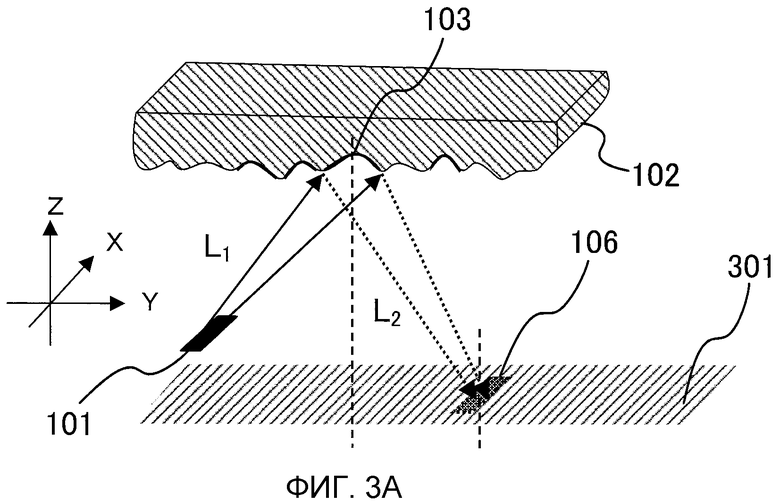
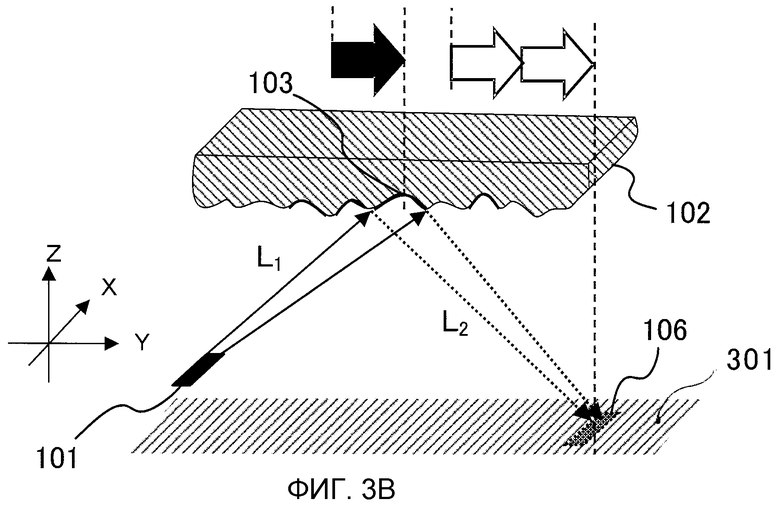
Фиг.3A и 3B изображают схемы, демонстрирующие соотношение между величиной перемещения движущегося объекта и величиной перемещения изображения светоизлучающей области согласно варианту осуществления 1;
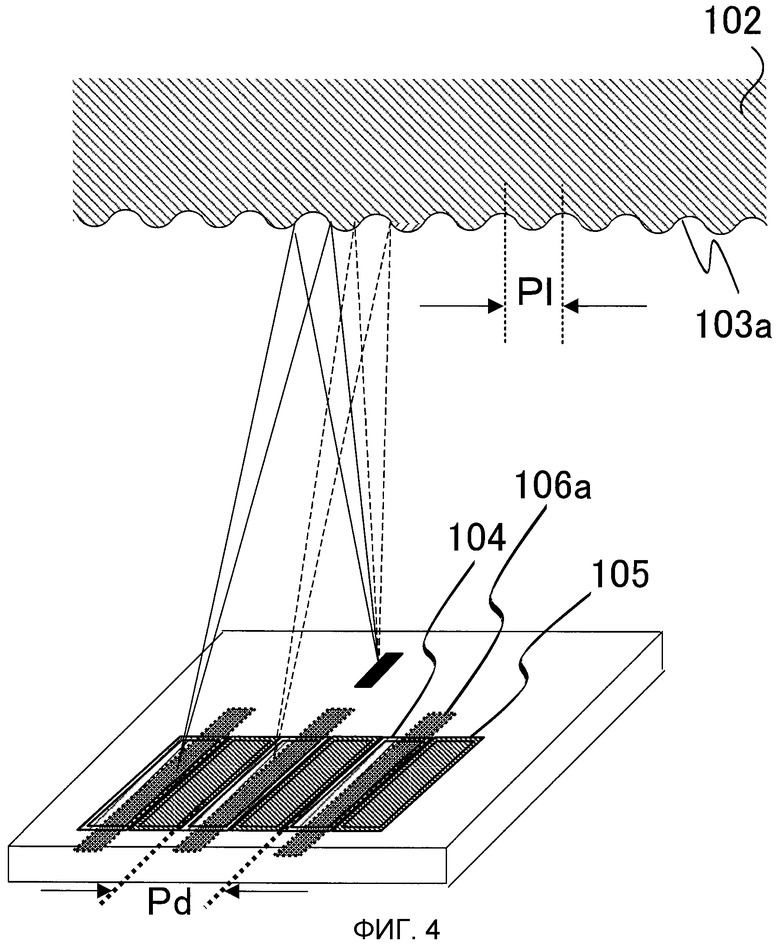
Фиг.4 изображает схему, демонстрирующую углубления, образующие периодическую структуру на поверхности движущегося объекта согласно варианту осуществления 1;
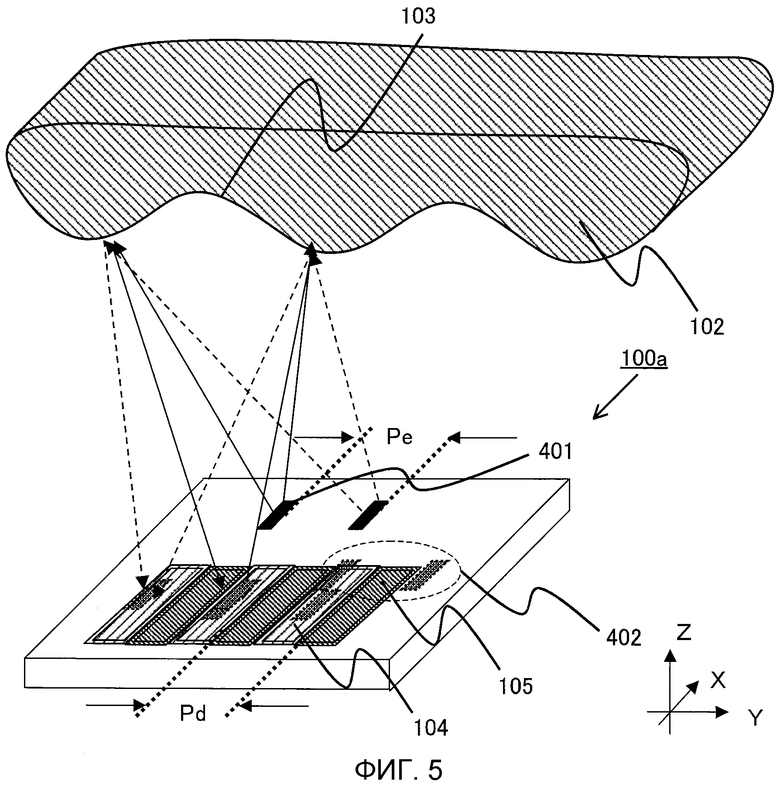
Фиг.5 изображает схему конфигурации устройства измерения перемещения согласно варианту осуществления 2;
Фиг.6 изображает схему конфигурации устройства измерения скорости согласно варианту осуществления 3;
Фиг.7 изображает блок-схему процесса, который обеспечивает данные с задержкой по времени согласно варианту осуществления 3;
Фиг.8 изображает схему конфигурации другого устройства 400a измерения скорости согласно варианту осуществления 3;
Фиг.9 изображает схему конфигурации другого устройства 400b измерения скорости согласно варианту осуществления 3.
Описание вариантов осуществления изобретения
Ниже описаны иллюстративные варианты осуществления настоящего изобретения со ссылкой на прилагаемые чертежи. На всех чертежах одинаковые элементы обозначены одинаковыми позициями.
Вариант 1 осуществления
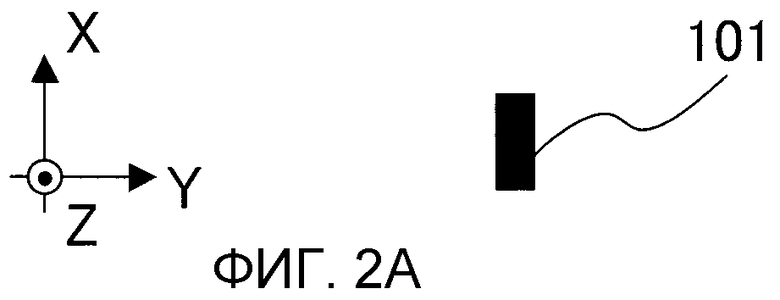
Прежде всего описано устройство измерения перемещения согласно варианту 1 осуществления настоящего изобретения. На Фиг.1 показана схема конфигурации устройства измерения перемещения в настоящем варианте осуществления. На Фиг.1 устройство 100 измерения перемещения измеряет величину перемещения движущегося объекта. Светоизлучающая область 101 источника света обеспечена в устройстве 100 измерения перемещения. Движущийся объект облучается с использованием светового потока, излучаемого из светоизлучающей области 101. Светоизлучающая область 101 указывает картину излучения света, сформированную маской, например отверстием, которое сформировано в электроде с покрытием на светоизлучающей поверхности бескорпусного кристалла СИД (светоизлучающего диода). Светоизлучающая область 101 также включает в себя светоизлучающую поверхность источника света с поверхностным излучением света, например VCSEL, или светоизлучающую поверхность LD от около 1 мкм до около 2 мкм.
Движущийся объект 102 является целью измерения величины перемещения, осуществляемого устройством 100 измерения перемещения. Движущийся объект 102 способен перемещаться в направлении оси Y и облучается расходящимся светом из светоизлучающей области 101 источника света. Расходящийся свет, облучающий движущийся объект 102, отражается и сходится на углублениях 103 движущегося объекта 102, формируя изображение 106 области источника света на фотодиодных матрицах 104 и 105 (светопринимающем элементе). Согласно Фиг.1 светопринимающий элемент включает в себя множество светопринимающих областей (например, множество фотодиодных матриц 104 и 105), размещенных в направлении перемещения (направлении оси Y) движущегося объекта 102, и формирует изображение светового потока, отражающегося от вогнутых углублений 103 движущегося объекта 102 для приема светового потока. Устройство 100 измерения перемещения включает в себя измерительный блок (не показан), который измеряет величину перемещения движущегося объекта 102 на основании величины перемещения изображения светоизлучающей области 106, сформированного на светопринимающем элементе путем формирования изображения светового потока, отражающегося от углублений 103.
Предпочтительно, чтобы углубления 103 были вогнутыми и имели фокусное расстояние F, которое отвечает следующему выражению (1), где L1 - длина оптического пути от светоизлучающей точки на светоизлучающей области 101 источника света до углубления 103, и L2 - длина оптического пути от углубления 103 до фотодиодных матриц 104 и 105.
-1/L1-1/L2=1/F (1)
Фотодиодные матрицы 104 и 105 размещены попеременно с шириной Pd/2 и шагом Pd (шириной периода) в направлении перемещения (направлении оси Y) движущегося объекта 102. Фотодиодные матрицы 104 и 105 имеют одинаковую конфигурацию и разнесены в пространстве друг от друга на ширину Pd/2 в направлении перемещения движущегося объекта 102. Ширина We светоизлучающей области 101 определяется связыванием ширины каждой из фотодиодных матриц 104 и 105. Подробное описание приведено ниже.
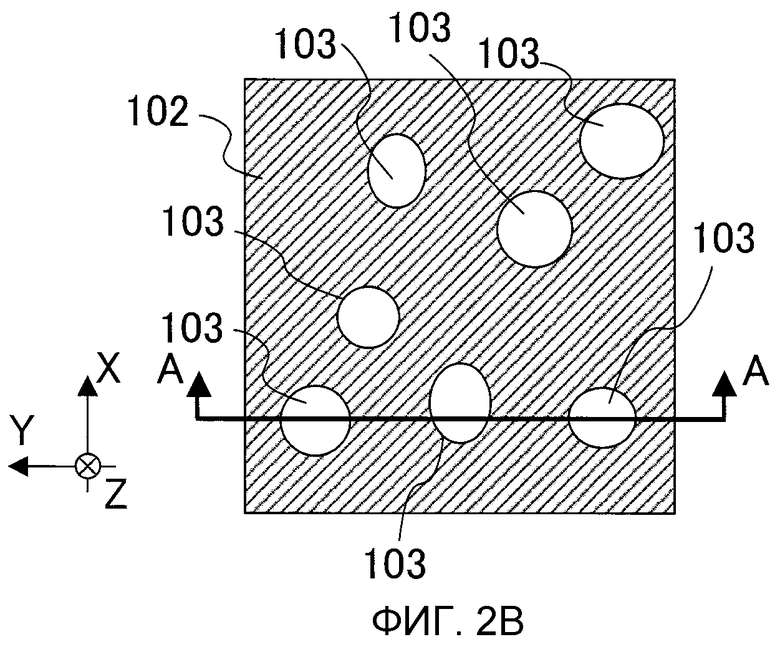
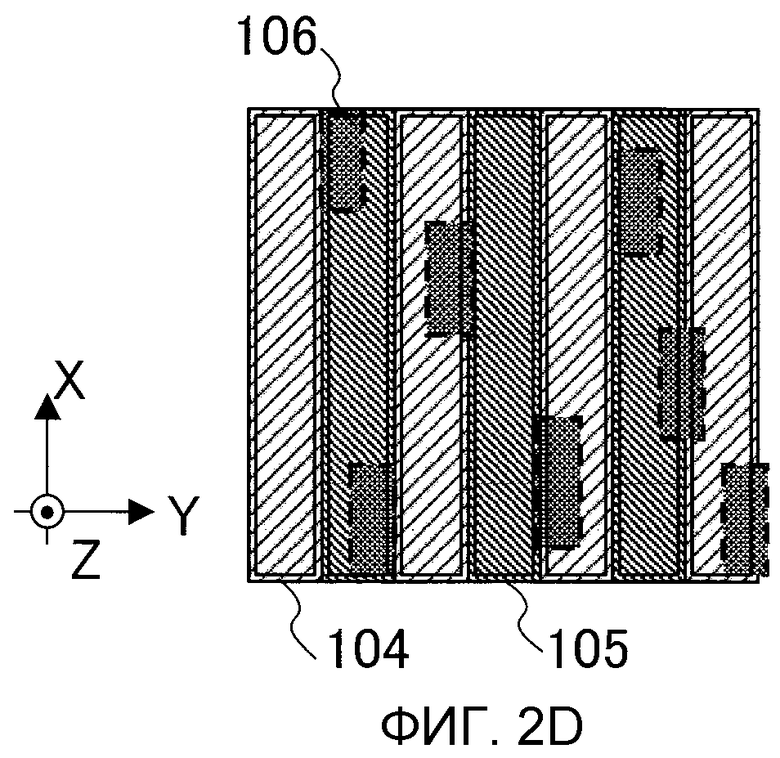
Ниже со ссылкой на Фиг.2A-2D описан принцип генерации изображения 106 светоизлучающей области в устройстве 100 измерения перемещения. Прежде всего описана позиция, где генерируется изображение 106 светоизлучающей области. Расходящийся свет, который излучается из источника света, включающего в себя светоизлучающую область 101, показанную на Фиг.2A, отражается и сходится на каждом из углублений 103 на поверхности движущегося объекта 102, показанного на Фиг.2B. Таким образом, как показано на Фиг.2D, изображение светоизлучающей области 106 источника света формируется на поверхностях фотодиодных матриц 104 и 105 с соотношением позиций, соответствующим позиции каждого из углублений 103 на поверхности движущегося объекта 102.
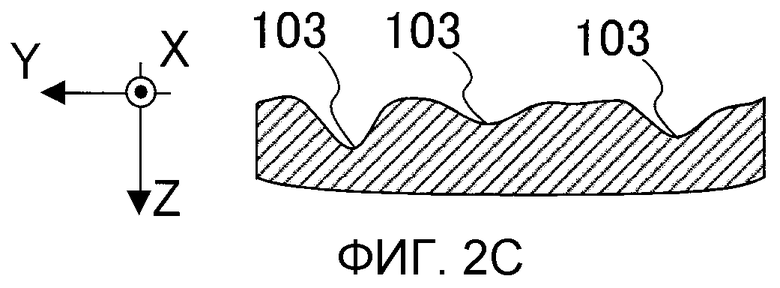
Ниже описана форма углубления 103 движущегося объекта 102 и принцип формирования изображения 106 светоизлучающей области. На поверхности обычного объекта, как показано на Фиг.2B, распределены углубления 103, имеющие разнообразные формы. Углубления 103 отличаются друг от друга шириной, как показано на Фиг.2C, которая является видом в разрезе по линии A-A на Фиг.2B. Таким образом, существуют углубления 103, имеющие различные формы. Однако, когда поверхность светопринимающего участка (фотодиодных матриц 104 и 105) располагается в оптимальной позиции наблюдения, которая определяется формой углубления 103 движущегося объекта 102, в ряде случаев формируется изображение 106 светоизлучающей области. Это случай, когда углубление 103 имеет фокусное расстояние F, которое отвечает вышеприведенному выражению (1).
Например, в области, где расстояние между устройством 100 измерения перемещения (поверхностью светопринимающего участка) и движущимся объектом 102 составляет от 1 до 3 мм, форма углубления 103, которое имеет диаметр около 100 мкм и глубину, меньшую или равную около 2 мкм, участвует в формировании изображения 106 светоизлучающей области. Дополнительно, в области, где расстояние между поверхностью светопринимающего участка и движущимся объектом 102 составляет от 4 до 6 мм, форма углубления 103, которое имеет диаметр около 200 мкм и глубину в несколько мкм, участвует в формировании изображения 106 светоизлучающей области. Таким образом, область в углублении 103, которое участвует в формировании изображения, различается в соответствии с позицией наблюдения. Таким образом, когда углубление 103 имеет сложную искривленную форму, как описано выше, изображение 106 светоизлучающей области формируется, даже если расстояние между поверхностью светопринимающего участка и движущимся объектом 102 до некоторой степени изменяется.
Ниже описан размер формируемого изображения 106 светоизлучающей области. Как описано выше, когда углубление 103 имеет фокусное расстояние F, которое отвечает выражению (1), изображение 106 светоизлучающей области формируется на фотодиодных матрицах 104 и 105. Однако углубление 103 не имеет идеальную искривленную поверхность и во многих случаях имеет множество сложных искривленных форм. В этом случае изображение 106 светоизлучающей области формируется путем перекрытия изображения светоизлучающей области, которое формируется на углублении 103, имеющем фокусное расстояние F, которое отвечает выражению (1), с множеством изображений светоизлучающих областей, которые расфокусируются множеством сложных искривленных форм. Вследствие такого явления изображение 106 светоизлучающей области, которое формируется на фотодиодных матрицах 104 и 105, имеет ширину, в полтора-два раза превышающую ширину светоизлучающей области 101, где идеально формируется изображение.
В принципе, если ширина изображения 106 светоизлучающей области равна ширине каждой из фотодиодных матриц 104 и 105, можно осуществлять регистрацию с высокой эффективностью использования света. Однако благодаря вышеописанному явлению сформированное изображение 106 светоизлучающей области пересекает ширину Pd/2 каждой из фотодиодных матриц 104 и 105, и изображение 106 светоизлучающей области перекрывается с соседними фотодиодными матрицами 104 и 105 или распространяется на них. Таким образом, согласно описанному ниже принципу регистрации сигнала амплитуда регистрируемого сигнала уменьшается и точность регистрации скорости снижается. Согласно варианту осуществления величина We определяется как ширина светоизлучающей области 101 источника света в направлении перемещения (направлении оси Y) движущегося объекта 102. Когда We/Pd, т.е. отношение ширины We светоизлучающей области источника света к шагу Pd фотодиодной матрицы, больше или равно 0,87, благодаря вышеописанному явлению размер изображения на светопринимающей поверхности в направлении перемещения больше или равен ширине шага фотодиодной матрицы. В результате, поскольку амплитуда сигнала регистрации по отношению к перемещению движущегося объекта снижается на десять или более процентов, существует проблема в том, что точность определения перемещения снижается. Соответственно, предпочтительно, чтобы We/Pd было меньше или равно 0,87.
Напротив, если светоизлучающая область 101 источника света слишком мала, изображение светоизлучающей области не перекрывается с соседней фотодиодной матрицей. Однако, когда значение We/Pd меньше 0.275, может возникать проблема, когда амплитуда регистрируемого сигнала уменьшается на десять или более процентов, что снижает точность определения величины перемещения движущегося объекта по причине снижения регистрируемой силы света, обусловленного сокращением светоизлучающей области. Соответственно, для получения точной регистрации перемещения предпочтительно, чтобы выполнялось условие, представленное следующим выражением (2).
0,275≤We/Pd≤0,87 (2)
Ниже со ссылкой на Фиг.3A и 3B описан принцип перемещения изображения 106 светоизлучающей области. На Фиг.3A и 3B указано соотношение между величиной перемещения движущегося объекта 102 и величиной перемещения изображения 106 светоизлучающей области на поверхности фотодиодной матрицы 301. На Фиг.3A показано позиционное отношение между движущимся объектом 102 и изображением 106 светоизлучающей области в момент времени T1, и на Фиг.3B показано позиционное отношение между движущимся объектом 102 и изображением 106 светоизлучающей области в момент времени T2. Черная стрелка на Фиг.3B указывает величину перемещения движущегося объекта 102 с разницей во времени T2-T1, и белая стрелка на Фиг.3B указывает величину перемещения изображения 106 светоизлучающей области на поверхности фотодиодной матрицы 301 с разницей во времени T2-T1.
Соотношение между величиной перемещения (т.е. перемещением) движущегося объекта 102 и величиной перемещения (т.е. перемещением) изображения 106 светоизлучающей области выражается следующим образом.
ДВИЖУЩИЙСЯ ОБЪЕКТ:
ИЗОБРАЖЕНИЕ СВЕТОИЗЛУЧАЮЩЕЙ ОБЛАСТИ = 1:(L1+L2)/L1
В настоящем варианте осуществления длина оптического пути L1 от светоизлучающей точки на светоизлучающей области 101 источника света до поверхности (углубления 103) движущегося объекта 102 и длина оптического пути L2 от поверхности движущегося объекта 102 до фотодиодной матрицы 104, которая является светопринимающим элементом, равны друг другу. Таким образом, соотношение между величиной перемещения движущегося объекта 102 и величиной перемещения изображения 106 светоизлучающей области выражается следующим образом.
ДВИЖУЩИЙСЯ ОБЪЕКТ: ИЗОБРАЖЕНИЕ СВЕТОИЗЛУЧАЮЩЕЙ ОБЛАСТИ = 1:2
На основании вышеозначенного принципа изображение 106 светоизлучающей области, сформированное на поверхности фотодиодной матрицы 301 перемещается в соответствии с перемещением движущегося объекта 102.
Ниже со ссылкой на Фиг.1 подробно описан способ регистрации величины перемещения движущегося объекта 102. Прежде всего описана конфигурация фотодиодной матрицы и способ регистрации сигнала. Изображение 106 светоизлучающей области формируется на фотодиодных матрицах 104 и 105 углублениями 103 движущегося объекта 102. Двухмерное изображение оптической картины, содержащее изображение 106 светоизлучающей области, генерируемое на фотодиодных матрицах 104 и 105, подвергается фотоэлектрическому преобразованию фотодиодными матрицами 104 и 105 для преобразования в значение напряжения, указывающее одномерную силу света. Затем получается сумма значений регистрируемого напряжения множества фотодиодов, образующих фотодиодную матрицу 104, и значение регистрируемого напряжения V1 фотодиодной матрицы 104 определяется совместно с функцией пространственного фильтра. Аналогично получается сумма значений регистрируемого напряжения множества фотодиодов, образующих фотодиодную матрицу 105, и значение регистрируемого напряжения V2 фотодиодной матрицы 105 определяется совместно с функцией пространственного фильтра. Затем устройство 100 измерения перемещения выводит разность V1-V2 значений регистрируемого напряжения двух фотодиодных матриц 104 и 105, т.е. дифференциал выходных сигналов фотодиодных матриц 104 и 105, в качестве значения напряжения в заранее определенное время.
Ниже описан способ регистрации величины перемещения движущегося объекта 102 на основании перемещений изображений оптической картины на фотодиодных матрицах 104 и 105, обусловленных перемещением движущегося объекта 102. Согласно варианту осуществления рассмотрим случай, когда значения регистрируемого напряжения V1 и V2 устройства 100 измерения перемещения равны Va и Vb соответственно, и разность V1-V2 значений регистрируемого напряжения равна Va-Vb, т.е. положительному напряжению (V1-V2=Va-Vb>0). В этом случае, когда изображение оптической картины перемещается на Pd/2, фаза распределения интенсивности обращается на 180 градусов и знак значения регистрируемого напряжения меняется на отрицательный. Иными словами, разность V1-V2 значений регистрируемого напряжения примерно равна Vb-Va (V1-V2≑Vb-Va<0).
Когда изображение оптической картины дополнительно перемещается на Pd/2, т.е. один период шагов фотодиодных матриц 104 и 105, знак значения регистрируемого напряжения меняется на положительный. Иными словами, выполняется соотношение V1-V2≑Vb-Va>0. Таким образом, когда изображение оптической картины перемещается на шаг Pd (величину перемещения) на фотодиодных матрицах 104 и 105, регистрируется однопериодная форма волны. Иными словами, в соответствии с перемещением движущегося объекта 102 число периодов изменений выходного напряжения, которые регистрируются устройством 100 измерения перемещения, отсчитывается для обеспечения возможности регистрации величины перемещения изображения оптической картины на фотодиодных матрицах 104 и 105. Таким образом, на основании вышеописанного соотношения между движущимся объектом 102 и изображением 106 светоизлучающей области и величиной перемещения регистрируемого изображения оптической картины, что описано согласно Фиг.3A и 3B, можно регистрировать величину перемещения движущегося объекта 102.
В настоящем варианте осуществления предусмотрена конфигурация фотодиодной матрицы дифференциальной регистрации для увеличения амплитуды регистрируемого сигнала, но конфигурация фотодиодной матрицы измерения перемещения этим не ограничивается. Например, с использованием фотодиодной матрицы величину перемещения также можно регистрировать на основании ситуации, когда одномерное распределение интенсивности изображения оптической картины смещается на матрице. Согласно варианту осуществления дифференциальное усиление не обязательно осуществлять с использованием дифференциальной фотодиодной матрицы 105.
Углубления 103 дискретно или непрерывно обеспечены на движущемся объекте 102 и предпочтительно имеют форму, включающую в себя радиус кривизны, который отвечает выражению (3), где R - радиус кривизны углубления 103.
R=(L1+L2)/2 (3)
Углубление 103, включенное в движущийся объект 102, не ограничивается только полусферической формой, но также может быть предусмотрена (полу)цилиндрическая поверхность. Кроме того, как показано на Фиг.4, вогнутую форму 103a можно намеренно обеспечивать периодически на движущемся объекте 102. В этом случае период матрицы Pl отвечает следующему выражению (4), где k - положительное целое число.
Pl=Pd/2×k (4)
Таким образом, величину перемещения движущегося объекта 102 также можно регистрировать с использованием периодического изображения 106a светоизлучающей области, которое формируется на фотодиодных матрицах 104 и 105.
Вариант 2 осуществления
Ниже описан вариант 2 осуществления настоящего изобретения. На Фиг.5 показана схема конфигурации устройства 100a измерения перемещения в настоящем варианте осуществления. Устройство 100a измерения перемещения согласно настоящему варианту осуществления отличается от устройства 100 измерения перемещения согласно варианту 1 осуществления тем, что множество светоизлучающих областей 401 (четные количества светоизлучающих областей) размещены в источнике света с шагом Pe. В настоящем варианте осуществления изменение изображения 402 светоизлучающей области и влияние на регистрируемый сигнал описывается обеспечением множества светоизлучающих областей 401.
Например, когда длина оптического пути L1 равна длине оптического пути L2 (L1=L2), изображение светоизлучающей области, которое формируется одним углублением 103, формируется с тем же увеличением, что и исходная светоизлучающая область 401, и формируется множество изображений 402 светоизлучающих областей, также имеющих шаг Pe. Таким образом можно обеспечить множество источников света для генерации изображений с заранее определенными шагами в случайном изображении оптической картины. Шаг Pe сформированных изображений 402 светоизлучающих областей выровнен с шагом Pd фотодиодных матриц 104 и 105 для эффективного получения эффекта пространственной фильтрации фотодиодных матриц 104 и 105, размещенных в пространстве с шагом. Иными словами, даже если углубления 103 имеют случайный период, изображения 402 светоизлучающих областей имеют периодичность светоизлучающих областей и имеют период, равный периоду фотодиодной матрицы регистрации изображения, что приводит к увеличению амплитуды регистрируемого сигнала и улучшению регистрации перемещения.
В соответствии с точностью монтажа источника света или фотодиодной матрицы в направлении оси Z увеличение при формировании изображения для множества изображений 402 светоизлучающих областей может изменяться для смещения шага изображений светоизлучающих областей множества изображений светоизлучающих 402 областей от заранее определенного шага Pe. В этом случае амплитуда сигнала уменьшается, и погрешность регистрации скорости увеличивается. Если величина перемещения велика, значения регистрируемого напряжения фотодиодных матриц 104 и 105 могут быть равны друг другу, и в некоторых случаях сигнал невозможно получить как дифференциал значения регистрируемого напряжения каждой фотодиодной матрицы. Таким образом, для получения сигнала эффективной регистрации перемещения предпочтительно, чтобы шаг Pe изображений 402 светоизлучающих областей и шаг Pd фотодиодных матриц 104 и 105 отвечали следующему выражению (5).

В выражении N является целым числом, большим или равным 2, которое указывает количество светоизлучающих областей. Настоящий вариант осуществления описывает вариант осуществления с двумя светоизлучающими областями, но это не является ограничением, пока выполняется неравенство (5). Дополнительно, для получения функции пространственного фильтра светоизлучающие области должны располагаться так, чтобы включать в себя период целочисленного множества шага Pe изображений 402 светоизлучающих областей, который отвечает выражению (5). Поскольку принцип регистрации величины перемещения аналогичен принципу варианта 1 осуществления, описание варианта осуществления опущено.
В настоящем варианте осуществления предусмотрена конфигурация фотодиодной матрицы дифференциальной регистрации для увеличения амплитуды регистрируемого сигнала, и аналогично варианту 1 осуществления конфигурация фотодиода измерения перемещения этим не ограничивается. Например, с использованием фотодиодной матрицы величину перемещения также можно регистрировать на основании ситуации, когда одномерное распределение интенсивности изображения оптической картины смещается на матрице. Согласно варианту осуществления дифференциальное усиление не обязательно осуществлять с использованием дифференциальной фотодиодной матрицы 105. Углубление 103 движущегося объекта 102 не ограничивается только полусферической формой, но также можно применять форму, в которой углубление имеет полуцилиндрическую отражающую поверхность и намеренно периодически сформировано, как показано на Фиг.4.
Вариант 3 осуществления
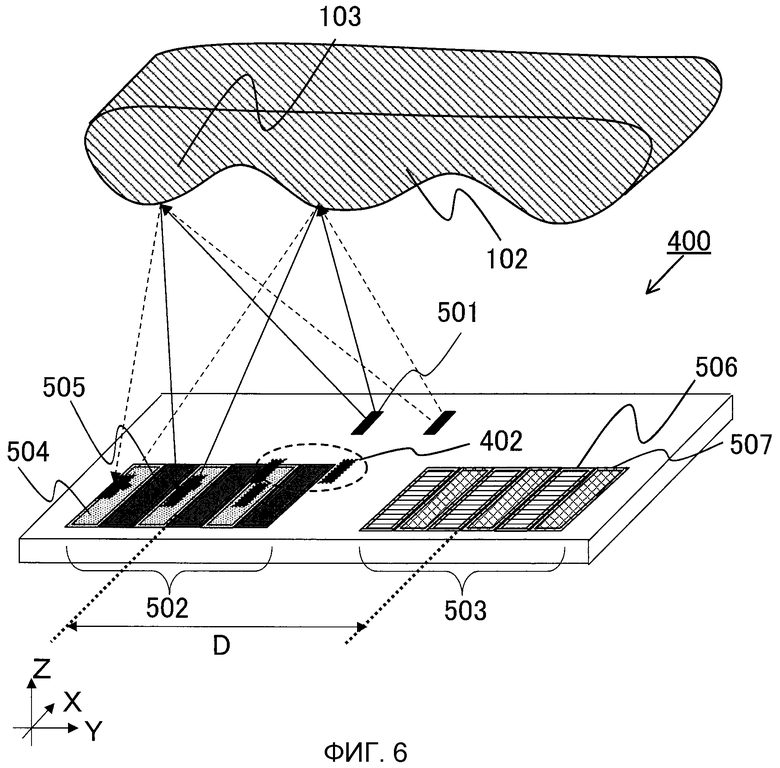
Ниже описан вариант 3 осуществления настоящего изобретения. В настоящем варианте осуществления будет описан способ измерения скорости движущегося объекта 102 с использованием устройства 100 измерения перемещения согласно варианту 1 осуществления или устройства 100a измерения перемещения согласно варианту 2 осуществления. На Фиг.6 показана схема конфигурации устройства 400 измерения скорости в настоящем варианте осуществления. Устройство 400 измерения скорости может регистрировать скорость движущегося объекта 102 на основании величины перемещения движущегося объекта 102 в заранее определенное время или время, необходимое движущемуся объекту для преодоления заранее определенного расстояния.
Устройство 400 измерения скорости включает в себя множество светоизлучающих областей 501 и группы 502 и 503 фотодиодных матриц. Группа 502 фотодиодных матриц включает в себя фотодиодную матрицу 504 и фотодиодную матрицу 505, которые используются для осуществления дифференциальной регистрации. Группа 503 фотодиодных матриц включает в себя фотодиодную матрицу 506 и фотодиодную матрицу 507, которые также используются для осуществления дифференциальной регистрации. Группы 502 и 503 фотодиодных матриц располагаются так, что их центры разнесены на расстояние D. Двухмерное изображение оптической картины, образованное множеством изображений светоизлучающих областей 402, которое генерируется на каждой группе фотодиодных матриц, подвергается фотоэлектрическому преобразованию фотодиодной матрицей, и одномерная сила света преобразуется в значение напряжения. Затем в качестве суммы значений регистрируемого напряжения множества фотодиодов, образующих фотодиодную матрицу 504, определяется значение регистрируемого напряжения V1 фотодиодной матрицы 504. Аналогично, в качестве суммы значений регистрируемого напряжения множества фотодиодов, образующих фотодиодную матрицу 505, определяется значение регистрируемого напряжения V2 фотодиодной матрицы 505. Затем группа 502 фотодиодных матриц выводит разность V1-V2 значений регистрируемого напряжения в качестве значения напряжения в заранее определенное время. Аналогично группа 503 фотодиодных матриц выводит значение напряжения в заранее определенное время.
Ниже описан способ регистрации скорости. Согласно варианту осуществления рассматривается случай, когда движущийся объект 102 перемещается в направлении оси Y. В этом случае сначала сигнал перемещения в соответствии с перемещением изображения оптической картины регистрируется группой 502 фотодиодных матриц. Затем в сигнал перемещения в соответствии с перемещением изображения оптической картины в той же позиции вносится задержка по времени, которая зависит от расстояния D между группами 502 и 503 фотодиодных матриц в направлении оси Y и скорости движущегося объекта 102, регистрируемой группой 503 фотодиодных матриц. Если разница во времени регистрации T одного и того же сигнала, регистрируемого каждой группой фотодиодных матриц, получена с высокой точностью, скорость движущегося объекта 102 можно вычислить, поскольку D известно (и скорость, конечно, равна расстоянию, деленному на время: D/T).
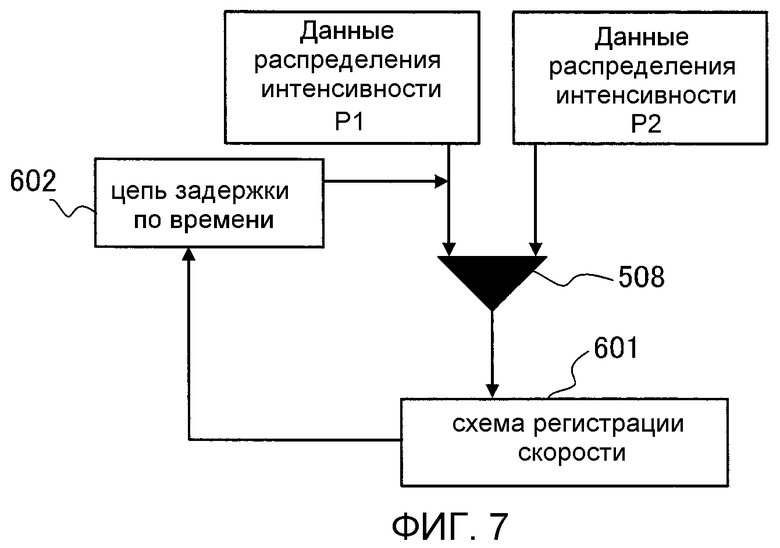
Ниже со ссылкой на Фиг.7 будет описан конкретный способ регистрации скорости. На Фиг.7 показана блок-схема процесса, который обеспечивает данные с задержкой по времени. Данные изменения (данные распределения интенсивности) регистрируемого выхода в соответствии с перемещением движущегося объекта 102 в заранее определенное время, которое точно регистрируется группой 502 фотодиодных матриц, задаются как P1. Аналогично, данные изменения (данные распределения интенсивности) регистрируемого выхода, которые регистрируются группой 503 фотодиодных матриц с задержкой в соответствии с перемещением движущегося объекта 102 в заранее определенное время, задаются как P2. Данные изменения P1 и P2 сравниваются компаратором 508, который сравнивает значения напряжения как функции времени.
Если оптимальная величина задержки по времени данных включается в данные изменения P1 как результат сравнения компаратором 508, данные изменения P1 и P2 соответствующих групп фотодиодных матриц совпадают друг с другом как функции времени. С другой стороны, если данные изменения P1 и P2 не совпадают друг с другом, схема 601 регистрации скорости обеспечивает цепь 602 задержки по времени со значением поправки по отношению к величине задержки по времени. Затем компаратор 508 снова осуществляет сравнение с использованием данных изменения P1, в которых предусмотрена скорректированная величина задержки по времени. В соответствии с циклом схема 601 регистрации скорости определяет разницу во времени T регистрации. Кроме того, на основании расстояния D между группами 502 и 503 фотодиодных матриц скорость V движущегося объекта 102 можно получить с использованием следующего выражения (6).

Настоящий вариант осуществления описывает пример, где устройство 400 измерения скорости построено на основе устройства 100a измерения перемещения согласно варианту осуществления 2. Однако настоящий вариант осуществления этим не ограничивается, и устройство 400 измерения скорости также может быть построено на основе устройства 100 измерения перемещения согласно варианту 1 осуществления. Что касается конфигурации фотодиодной матрицы, описанной согласно вариантам осуществления 1 и 2, она не ограничивается конфигурацией фотодиодной матрицы дифференциальной регистрации.
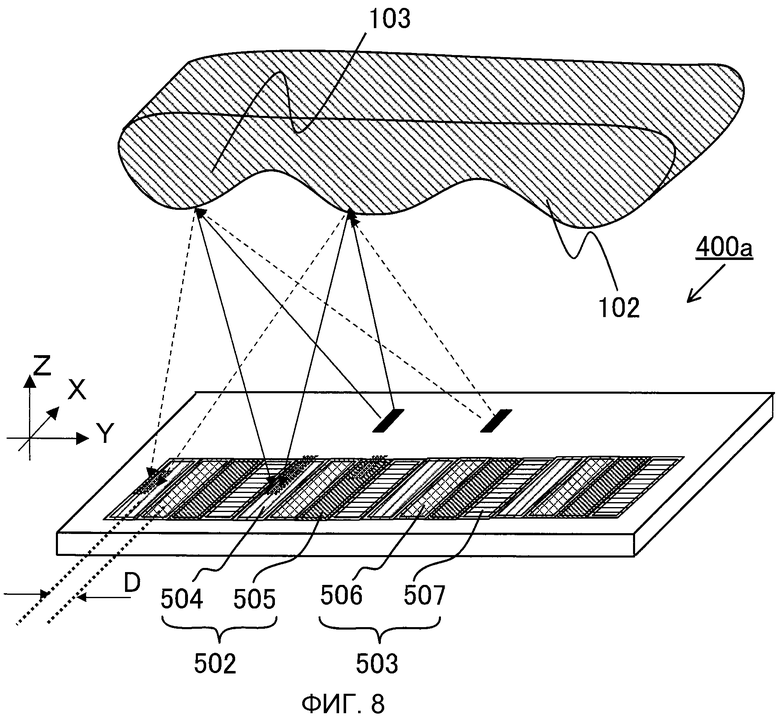
На Фиг.8 показана схема конфигурации другого устройства 400a измерения скорости в настоящем варианте осуществления. Согласно Фиг.8 устройство 400a измерения скорости приспособлено так, что группы 502 и 503 фотодиодных матриц утоплены. Расстояние D между группами 502 и 503 фотодиодных матриц сделано более коротким, чем длина каждой фотодиодной матрицы.
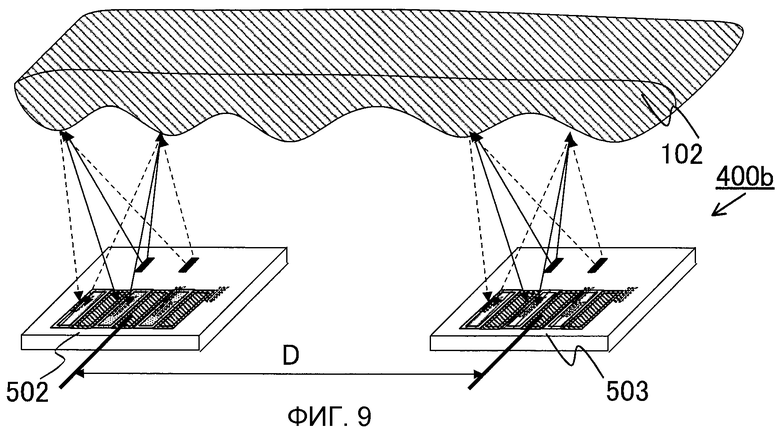
На Фиг.9 показана схема конфигурации другого устройства 400b измерения скорости в настоящем варианте осуществления. Согласно Фиг.9 группы 502 и 503 фотодиодных матриц не размещены на одной и той же подложке, и два устройства измерения перемещения, описанные согласно вариантам осуществления 1 и 2, также могут располагаться на заранее определенном расстоянии D друг от друга. В этом случае формула вычисления скорости получается согласно V=D/T на основании времени T, необходимого для прохождения расстояния D между центрами групп фотодиодов в устройстве измерения перемещения.
Согласно каждому из вышеприведенных вариантов осуществления с использованием изображения светоизлучающей области, которое формируется на поверхности светопринимающего элемента (на фотодиоде) углублением движущегося объекта, обеспечивается возможность получения отчетливого изображения оптической картины. Таким образом получается сигнал регистрации перемещения движущегося объекта, который имеет высокое отношение SN, выражающее целостность сигнала, что позволяет повысить точность регистрации величины и скорости перемещения. Поскольку система регистрации не использует систему формирования изображения, например линзу, можно уменьшить размер, вес и стоимость. Таким образом можно обеспечить высокоточное устройство измерения перемещения.
Хотя настоящее изобретение описано со ссылкой на иллюстративные варианты осуществления, следует понимать, что изобретение не ограничивается раскрытыми иллюстративными вариантами осуществления. Объем притязаний нижеследующей формулы изобретения следует рассматривать в наиболее широкой интерпретации, призванной охватывать все подобные модификации и эквивалентные структуры и функции.
Изобретение предназначено для бесконтактных измерений величин перемещения и скорости. Устройство 100 измерения перемещения движущегося объекта 102 включает в себя источник света, который облучает движущийся объект 102 с использованием светового потока, излучаемого из светоизлучающей области 101, фотодиодную матрицу 104, 105, которая включает в себя множество светопринимающих областей в направлении перемещения движущегося объекта 102 и которая формирует изображение светового потока, отражающегося на множества углублений 103 движущегося объекта 102 для приема света, и измерительный блок, который измеряет величину перемещения движущегося объекта 102 на основании величины перемещения изображения 106 светоизлучающей области, которое формируется на фотодиодной матрице 104, 105 путем формирования изображения светового потока. Изобретение позволяет повысить точность измерений. 2 н. и 3 з.п. ф-лы, 9 ил.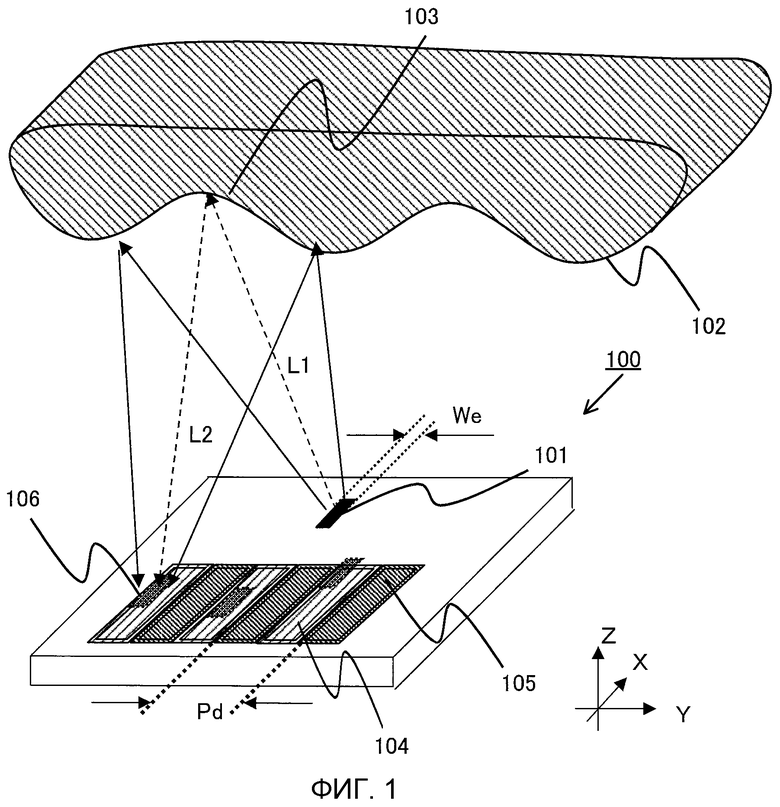
1. Устройство измерения перемещения для измерения величины перемещения движущегося объекта, содержащее:
источник света, выполненный с возможностью облучения движущегося объекта с использованием светового потока, излучаемого из светоизлучающей области,
светопринимающий элемент, включающий в себя множество светопринимающих областей, размещенных в направлении перемещения движущегося объекта, причем светопринимающий элемент размещен так, что световой поток, излучаемый из светоизлучающей области, и световой поток, отражающийся от углублений в движущемся объекте, изображаются на светопринимающей поверхности светопринимающего элемента, и
измерительный блок, выполненный с возможностью измерения величины перемещения движущегося объекта на основании величины перемещения изображения светоизлучающей области, которое формируется на светопринимающем элементе, при этом источник света включает в себя четное количество светоизлучающих областей, размещенных в направлении перемещения движущегося объекта, и
устройство измерения перемещения отвечает следующему условию, где: L1 - длина оптического пути от светоизлучающей точки источника света до одного из множества углублений движущегося объекта; L2 - длина оптического пути от одного и того же углубления движущегося объекта до светопринимающего элемента; Ре - шаг между светопринимающими областями, расположенными рядом друг с другом в направлении перемещения движущегося объекта; и N - количество светоизлучающих областей, которое является четным числом:

2. Устройство измерения перемещения по п.1, которое отвечает следующему условию, где: We - ширина светоизлучающей области в направлении перемещения движущегося объекта, и Pd - шаг между светопринимающими областями, соседствующими друг с другом в направлении перемещения движущегося объекта:
0,275≤We/Pd≤0,87.
3. Устройство измерения перемещения по п.1 или 2,
в котором углубления дискретно или непрерывно обеспечены на движущемся объекте и имеют форму, включающую в себя радиус кривизны, который отвечает следующему условию, где: R - радиус кривизны одного из множества углублений; L1 - длина оптического пути от светоизлучающей точки источника света до углубления движущегося объекта; и L2 - длина оптического пути от углубления движущегося объекта до светопринимающего элемента:
R=(L1+L2)/2.
4. Устройство измерения перемещения по п.1 или 2,
в котором углубления находятся в периодической матрице так, что отвечают следующему условию, где: P1 - период матрицы углублений; Pd - шаг между светопринимающими областями, размещенными рядом друг с другом в направлении перемещения движущегося объекта; и k - положительное целое число:
P1=Pd/2·k.
5. Устройство измерения скорости, включающее в себя устройство измерения перемещения по любому из пп.1-4,
в котором устройство измерения скорости размещено для регистрации скорости движущегося объекта на основании величины перемещения движущегося объекта, определенной устройством измерения перемещения в заранее определенное время.
| US 5886787 А, 23.03.1999 | |||
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| JP 59131167 А, 27.07.1984 | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Измеритель скорости | 1986 |
|
SU1418618A1 |
| ЕР 1865465 А1, 12.12.2007 | |||
| JP 3195971 А, 27.08.1989. | |||

