Область техники, к которой относится изобретение
Изобретение относится к оборудованию для бурения, подготовки, восстановительного ремонта и оценки скважин. Точнее, настоящее изобретение относится к способам и системам регулирования скорости блока на основании задач, подлежащих выполнению на скважине.
Уровень техники
После бурения отверстия через подземный пласт, определив, что пласт может вырабатывать достаточное с экономической точки зрения количество нефти или газа, бригада рабочих заканчивает скважину. По завершении в пласте могут произойти разного рода случаи, приводящие к необходимости «переделки» скважины и ее оборудования. С этой целью операции по техническому обслуживанию и «переделки» скважины используются в их самом широком смысле относительно всех мероприятий, выполняемых в скважине или для нее с целью ремонта или восстановления скважины, а также содержат мероприятия для закрытия или заглушивания скважины. Как правило, операции по переделке содержат такие операции, как замена изношенных или поврежденных частей (например, насосов, насосных штанг, систем труб и уплотнительных прокладок пакеров), применение таких вспомогательных или третичных средств восстановления, как химическая обработка или обработка скважины горячей нефтью, цементирование и каротаж ствола скважины, причем названы только некоторые из них.
Во время бурения скважины, вскрытия нефтяного пласта и ремонта скважины персонал в рабочем порядке вставляет в скважину и/или извлекает из скважины такое оборудование, как насосно-компрессорные трубы, системы труб, трубопроводы, насосные штанги, пустотелые цилиндры, обсадные колонны труб, забивные трубы, переходные муфты и воздуховоды. Например, обслуживающий персонал может использовать установку для ремонта скважин (в дальнейшем, буровая установка), которая адаптирована, среди всего прочего, для извлечения труб или штанг скважины, а также спуска труб или штанг обратно в скважину. Обычно эти передвижные буровые установки основываются на автотранспортном средстве и имеют выдвижную, самоподъемную буровую вышку, укомплектованную буровой лебедкой и блоком. Персонал может проверить извлекаемую трубу и оценить, одну или более секций этой трубы необходимо заменить из-за физического износа, утончения стенки трубы, химической коррозии, образования изъязвлений или других дефектов. Персонал обычно заменяет секции, в которых обнаружен недопустимый уровень износа и отмечает другие секции, требующие замены и последующей заявки на техническое обслуживание, в которых намечаются признаки износа.
Во время демонтажа трубы или штанги, оператор буровой установки обычно поднимает свечу труб (или штанг), которая затем крепится на место посредством клиновых захватов (или элеватора для штанг), в то время как свеча отделяется от оставшейся части трубы или колонны насосных штанг в скважине. Если свеча труб отделена от той, которая все еще находится в скважине, то свеча труб может быть помещена на площадку вышки для операций с насосно-компрессорными трубами. Во время обычно применяемого подъема оператор буровой установки имеет полный набор средств регулирования скорости, при которой трубы или штанги поднимаются из скважины. Благодаря этому операторы стремятся извлекать штанги, трубы или другое оборудование из скважины возможно быстрее, чтобы завершить работу своевременно. Однако при извлечении оборудования из скважины на слишком высокой скорости возможности повреждений оборудования скважины и количество рабочих около скважины резко возрастает.
Кроме этого, по мере поднятия свечей труб (или штанг) из скважины общая нагрузка на колонну уменьшается, и длина колонны уменьшается. Когда в скважине остается немного свечей труб, то извлечение труб при стандартной скорости может стать весьма рискованным, поскольку, если поднимаемая труба застревает или тормозится в элеваторе в скважине, тогда меньше полная упругость трубы в пределах ее оставшейся длины и, следовательно, меньше времени, чтобы среагировать на проблемы, вызванные ее застреванием в скважине. Это также может стать причиной опасных условий в области устья скважины.
Далее, во время исследований в скважине или когда оборудование, такое как трубы, проверяется в скважине, данные, полученные в результате проверки, могут быть обманчивыми, если каротажная аппаратура или трубы (если каротажная аппаратура является стационарной) извлекаются слишком быстро, из-за чего ограничивается полезность данных проверки.
Таким образом, в данной области техники существует необходимость создания системы и способа управления скоростью блока буровой установки во время операции извлечения или спуска и ограничения максимально допустимой скорости блока, тем самым ограничивая скорость оборудования, которое крепится к подъемному крюку буровой вышки. Более того, необходим способ и устройство для оценки работы, выполняемой буровой вышкой, и нагрузки на крюк и/или на буровую установку для определения того, должна ли скорость блока ограничиваться максимально допустимой скоростью. Кроме того, в данной области техники необходим способ оценки работы, совершаемой буровой установкой, и количества оборудования, остающегося в скважине, для определения того, должна ли скорость блока ограничиваться максимально допустимой скоростью. Помимо этого, необходимы система и способ выключения системы блокировки для коробки передач, приводящей в движение блок, если нагрузка на крюк невелика или только малая часть оборудования, такого как трубы, остается в скважине во время операции извлечения его из скважины.
Настоящее изобретение служит для решения этих, а также других подобных проблем в области обслуживания скважин.
Раскрытие изобретения
Способ регулирования скорости блока на основе выполняемой задачи, подлежащей выполнению, может содержать процесс приема входа задачи на установку подземного текущего ремонта скважин. Максимально допустимая скорость определяется на основании данной задачи. Датчик или другое устройство оценки скорости может обеспечить вход для текущей скорости блока при выполнении задачи. Следует оценивать положение дроссельной заслонки для двигателя, управляющего блоком, чтобы определить, должна ли скорость блока повышаться или понижаться. Когда положение дроссельной заслонки указывает на то, что оператор делает попытку повысить скорость блока, то текущая скорость блока сравнивается с максимально допустимой скоростью, если текущая скорость ниже максимально допустимой, но изменение будет увеличивать ее выше максимально допустимой скорости, то на двигатель подается управляемый сигнал, ограничивающий скорость блока до максимально допустимой скорости, при которой регулирование скорости блока оператором ограничивается до уменьшения скорости блока. Если текущая скорость ниже максимально допустимой скорости и изменение не будет повышать скорость блока выше максимально допустимой скорости, то оператору разрешено выполнять полное управление скоростью блока посредством дроссельного управления. Каждый вид работы может иметь множество максимально допустимых скоростей, которые изменяются в зависимости от заданных условий эксплуатации, таких как нагрузка на крюк, нагрузка на буровую установку или количество оборудования, оставшегося в скважине. Кроме того, когда нагрузка на крюк незначительна или в скважине осталось мало оборудования, то от блокировки для коробки передач можно освободиться, как и от регулирования скорости блока.
В соответствии с одним вариантом настоящего изобретения способ регулирования скорости блока на буровой установке может содержать процесс получения скорости блока из устройства анализа скорости. Принимаются входные данные текущего положения дроссельной заслонки, посредством которой оператор буровой установки регулирует скорость двигателя и соответственно скорость блока. Осуществляется оценка входных данных о дроссельной заслонке, чтобы определить, пытается ли оператор увеличить скорость блока выше максимально допустимой скорости; определяют, выполняется ли условие, что входные данные по дроссельной заслонке будут формировать изменение скорости блока, при котором скорость блока будет выше максимально допустимой скорости. Максимально допустимая скорость может вводиться оператором или сохраняться в компьютере, процессоре или устройстве анализа. Затем скорость блока может быть ограничена до максимально допустимой скорости, если входные данные для текущего положения дроссельной заслонки увеличили бы скорость блока выше максимально допустимой скорости.
В соответствии с другим вариантом настоящего изобретения способ регулирования скорости блока может содержать ввод задачи, подлежащей выполнению, в компьютер или процессор оценки скорости на буровой установке для ремонта скважин. Максимально допустимая скорость может определяться или вычисляться на основе полученной задачи в компьютере для оценки скорости. Входные данные о положении дроссельной заслонки и текущей скорости блока могут быть введены в компьютер для оценки скорости. Оценка входных данных дроссельной заслонки может быть произведена, чтобы определить, пытается ли оператор увеличить скорость блока выше максимально допустимой скорости; определяют, выполняется ли условие, что входные данные по дроссельной заслонке будут формировать изменение скорости блока, при котором скорость блока будет выше максимально допустимой скорости. Скорость блока затем может быть ограничена до максимально допустимой скорости, если входные данные о текущем положении дроссельной заслонки увеличили бы скорость блока выше максимально допустимой скорости.
В соответствии с еще одним вариантом настоящего изобретения способ регулирования скорости блока на буровой установке скважины может содержать ввод задачи, подлежащей выполнению, в компьютер для оценки скорости на буровой установке. Заданный вес груза на крюке может сохраняться или вводиться в компьютер для оценки скорости. Максимально допустимая скорость может определяться или вычисляться на основании полученной задачи и заданного веса нагрузки в компьютере для оценки скорости. Входные данные о положении дроссельной заслонки, текущая скорость блока и текущий вес нагрузки могут вводиться в компьютер для оценки скорости. Компьютер для оценки скорости или другой компьютер могут определить, является ли текущий вес нагрузки на крюке равным или ниже заданного веса нагрузки на крюке. На основании положительного решения, что текущий вес нагрузки крюка равен или ниже заданного веса нагрузки на крюке, компьютер для оценки скорости препятствует тому, чтобы входные данные по дроссельной заслонке приводили к увеличению скорости блока выше максимально допустимой величины.
В соответствии с другим вариантом настоящего изобретения система регулирования скорости блока на буровой установке может содержать датчик дроссельной заслонки, чтобы определить, пытается ли оператор увеличить или уменьшить скорость двигателя и, следовательно, скорость блока. Также система содержит датчик скорости блока для определения текущей скорости блока. Кроме того, система может содержать дисплей входа задачи для получения задачи, подлежащей выполнению на скважине. Система также может содержать электронный контроллер двигателя для получения сигнала из датчика дроссельной заслонки или устройства оценки скорости и преобразования его в увеличение или уменьшение скорости двигателя, а также блока соответственно. Еще система может содержать устройство оценки скорости, такое как компьютер или процессор, для получения информации о задаче, дроссельной заслонке и скорости блока и определения, достигла ли уже скорость блока максимально допустимого значения или выходит за пределы максимально допустимой скорости. Устройство оценки скорости формирует сигнал, подаваемый на электронный контроллер двигателя, который отличается от входных данных о дроссельной заслонке и ограничивает скорость двигателя и соответственно скорость блока до максимально допустимого значения.
Краткое описание чертежей
Фиг.1 представляет вид сбоку передвижной установки для ремонта с поднятым подъемным краном в соответствии с одним вариантом реализации настоящего изобретения;
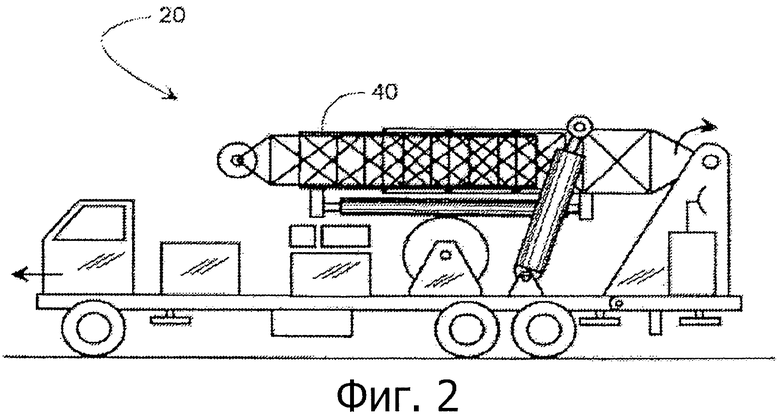
фиг.2 представляет вид сбоку передвижной установки для ремонта с убранным подъемным краном в соответствии с одним вариантом реализации настоящего изобретения;
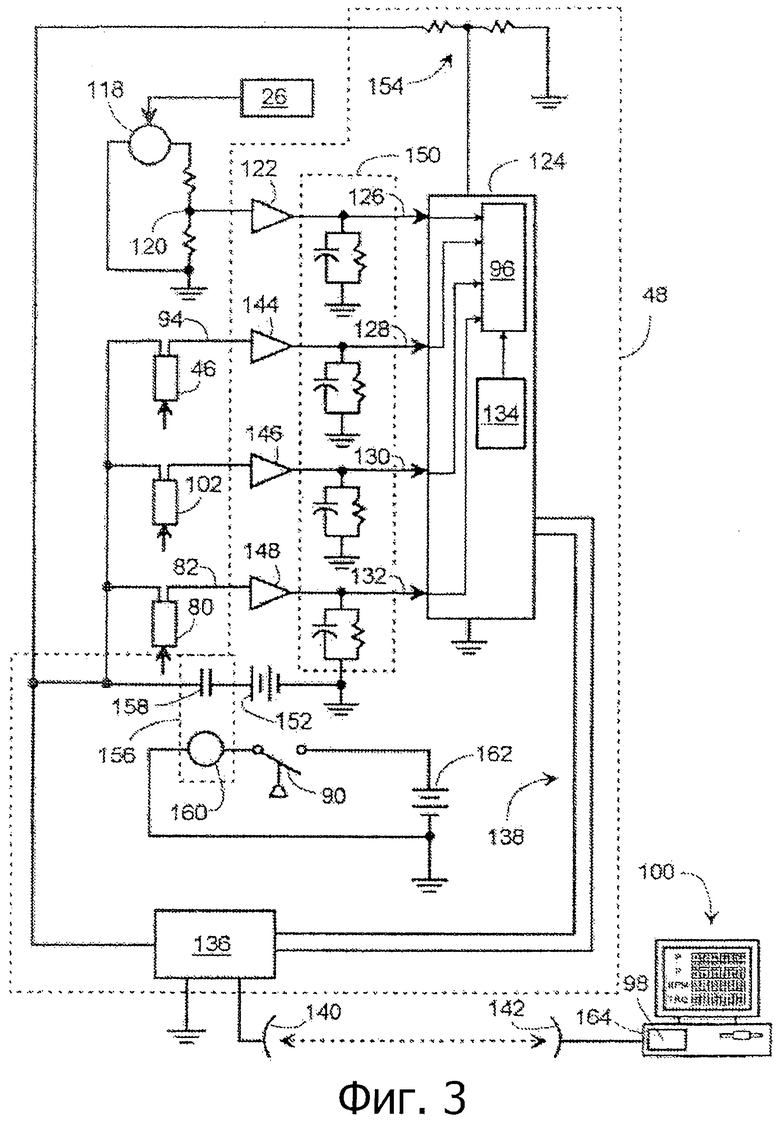
фиг.3 представляет электрическую схему управляющей цепи в соответствии с одним вариантом реализации настоящего изобретения;
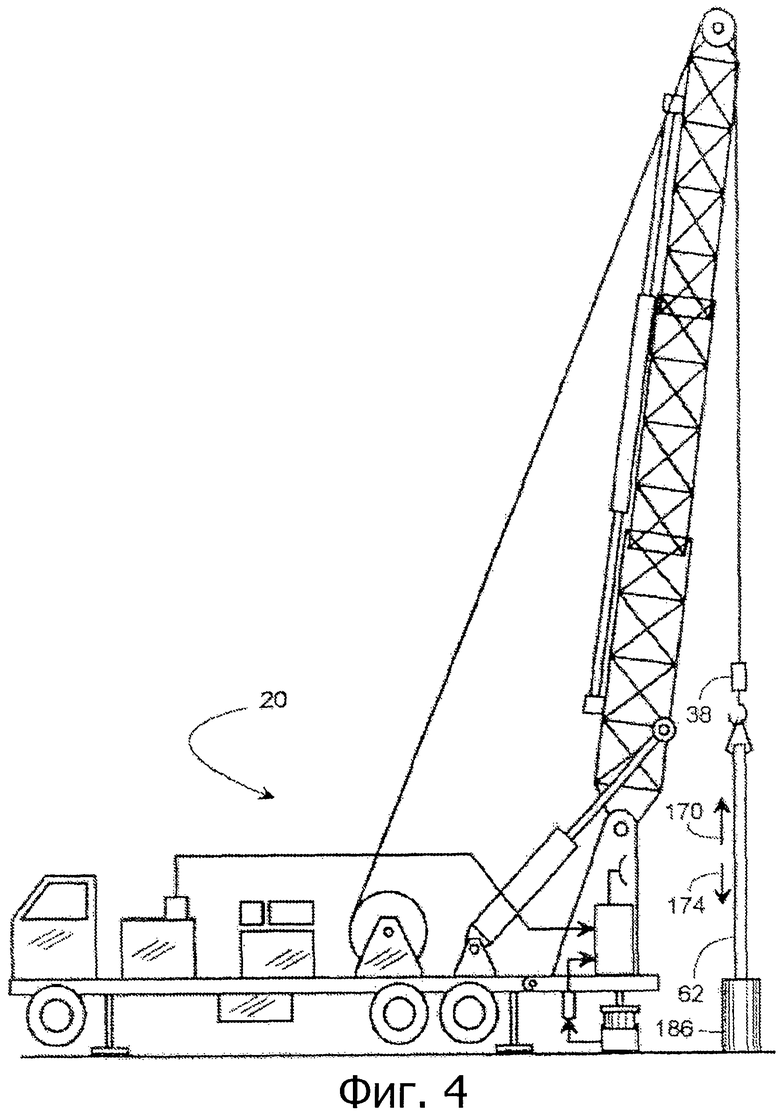
фиг.4 иллюстрирует подъем и спуск внутренней насосно-компрессорной колонны с помощью передвижной установки для ремонта в соответствии с одним вариантом реализации настоящего изобретения;
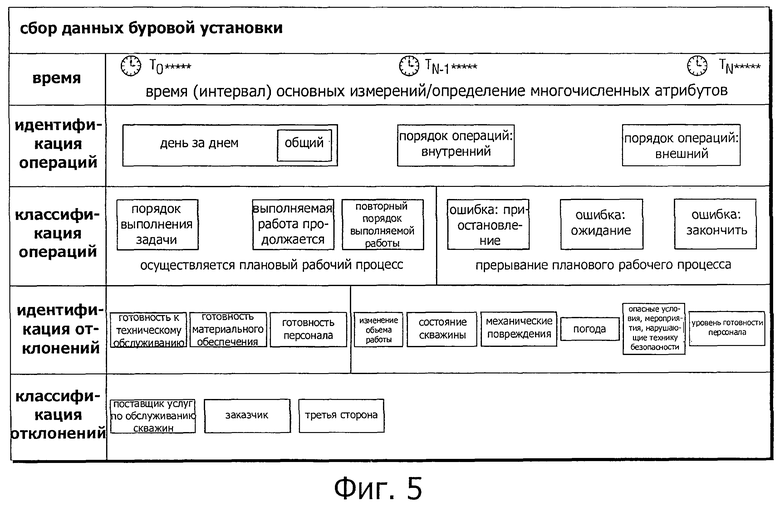
фиг.5 иллюстрирует один вариант реализации методологии сбора информации, представленной в табличной форме в соответствии с одним вариантом реализации настоящего изобретения;
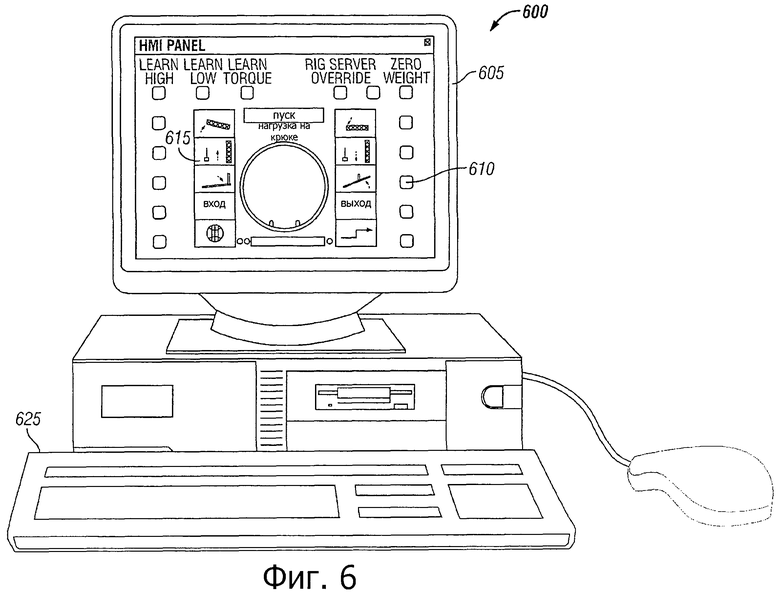
фиг.6 представляет вид спереди пульта оператора в соответствии с одним вариантом реализации настоящего изобретения;
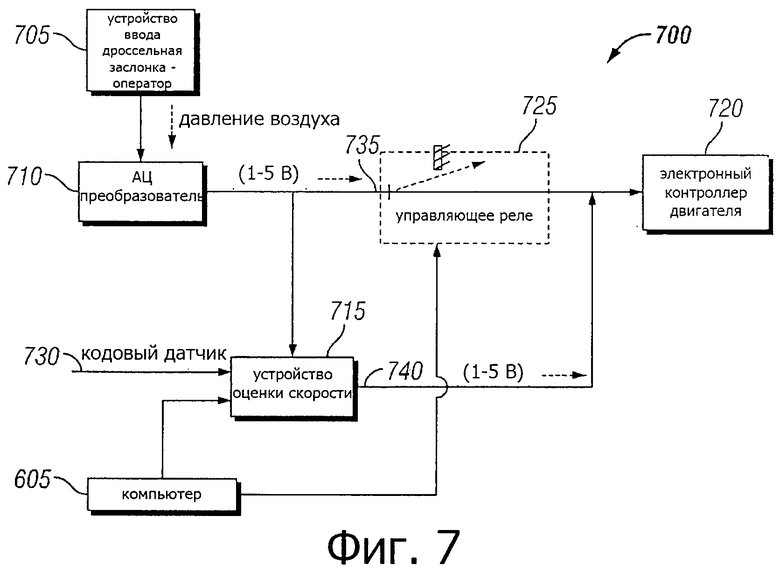
фиг.7 представляет блок-схему системы, которая отслеживает скорость блока на основании данной задачи и инициирует функцию регулирования скорости в соответствии с одним вариантом реализации настоящего изобретения;
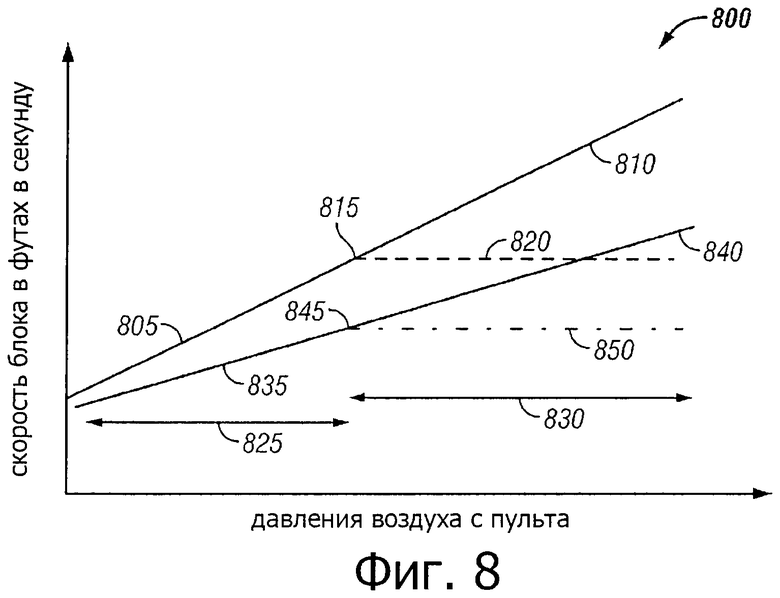
фиг.8 представляет результаты операции регулирования скорости блока в зависимости от давления сжатого воздуха на основании положения дроссельной заслонки в соответствии с одним вариантом реализации настоящего изобретения;
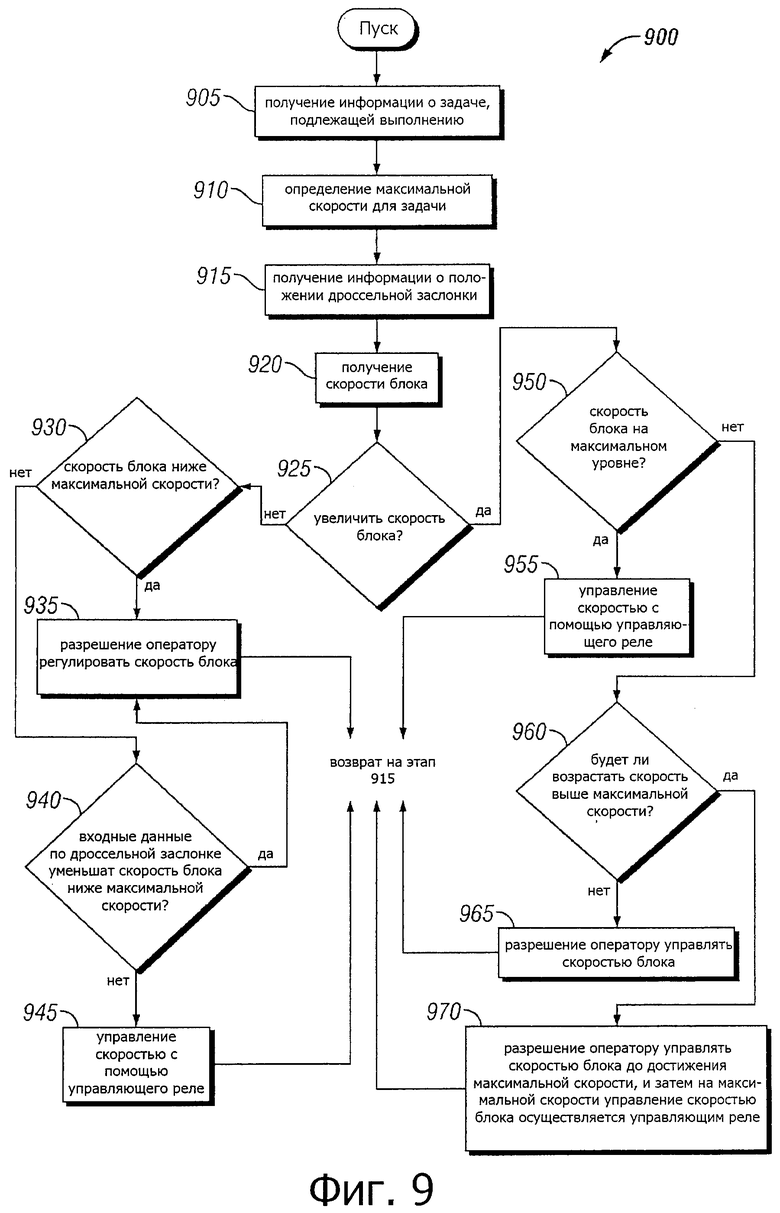
фиг.9 иллюстрирует логическую блок-схему, представляющую этапы процесса ограничения максимальной скорости блока на основании задачи, подлежащей выполнению, в соответствии с одним вариантом реализации настоящего изобретения;
фиг.10 иллюстрирует логическую блок-схему, представляющую этапы процесса ограничения максимальной скорости блока и отключения системы блокировки при переключении передачи на основании выполняемой задачи и нагрузки на систему в соответствии с одним вариантом реализации настоящего изобретения.
Варианты осуществления изобретения
Далее следует подробное описание вариантов осуществления изобретения со ссылкой на сопроводительные чертежи. Варианты реализации изобретения описываются в соответствии с тем, как они могут быть выполнены; для ясности не все особенности фактического воплощения приведены в данном описании. Специалистам понятно, что при создании реального конструктивного исполнения должны быть приняты некоторые специальные решения для достижения определенных целей изобретателей, такие как согласованность ограничений, связанных с бизнесом и системой, которые могут изменяться от одной реализации до другой. Более того, следует принять во внимание, что такие опытно-конструкторские разработки должны быть комплексными и требуют больших затрат времени, но тем не менее являются установившейся практикой для специалистов, имеющих пользу от этого изобретения. Другие аспекты и преимущества различных воплощений изобретения будут очевидны из рассмотрения нижеследующего описания и чертежей. Так как ссылки далее в основном относятся к штангам или насосно-компрессорным трубам в соответствии с описанием чертежей, то каждая ссылка должна быть прочитана в широком смысле, включая штанги, насосно-компрессорные трубы, системы трубопроводов и другое внутрискважинное оборудование за исключением специально выделенных.
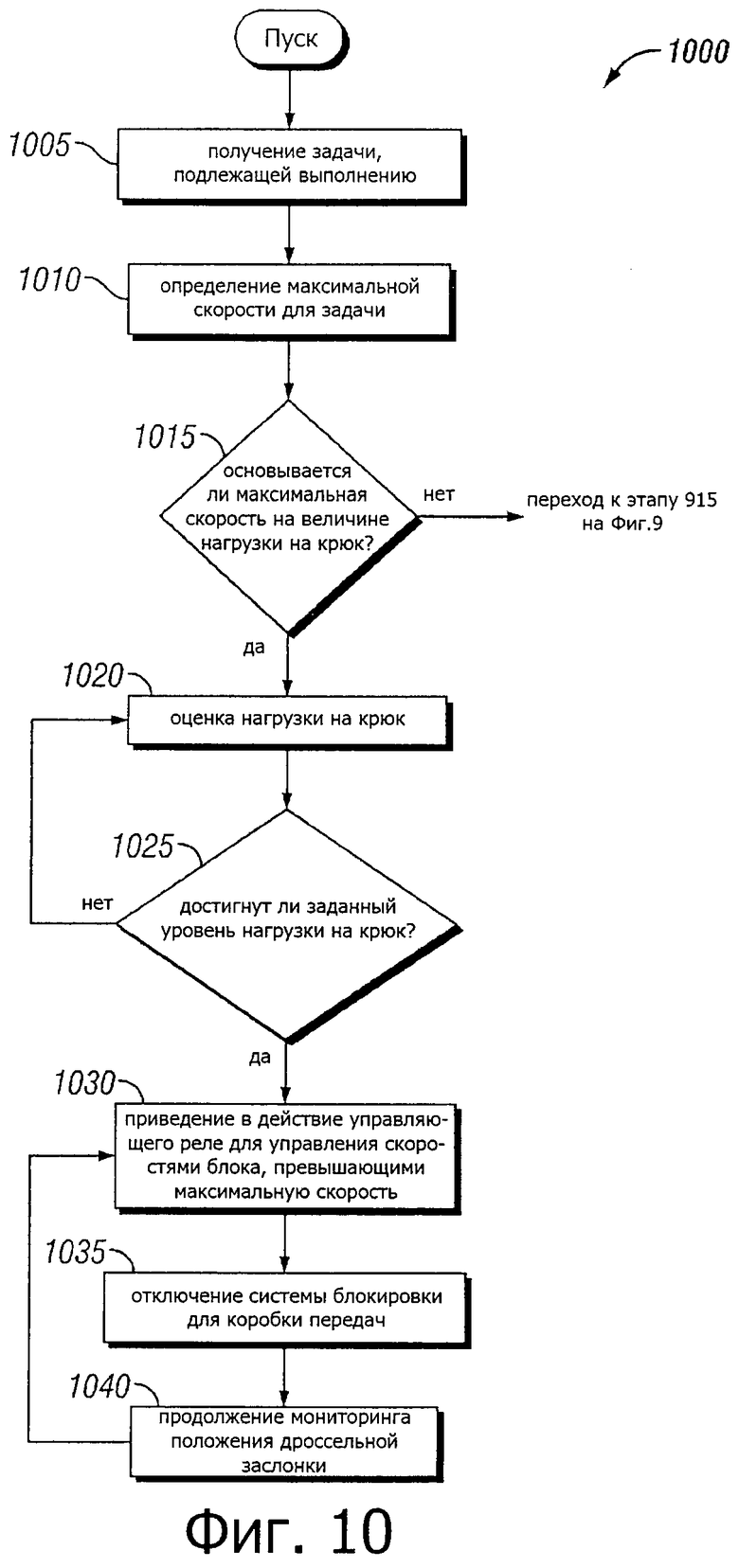
В соответствии фиг.1 представленная автономная мобильная установка 20 для ремонта содержит раму 22, поддерживаемую на колесах 24, двигатель 26, гидравлический насос 28, воздушный компрессор 30, первую коробку передач 32, вторую коробку передач 34, подъемник 36 с изменяемой скоростью, блок 38, раздвижной подъемный кран 40, первый гидроцилиндр 42, второй гидроцилиндр 44, первый преобразователь 46, монитор 48 и выдвижную опору 50.
Двигатель 26 выборочно соединяется с колесами 24 и подъемником 36 посредством коробок передач 34 и 32 соответственно. Двигатель 26 также приводит в действие гидравлический насос 28 через линию связи 29 и воздушный компрессор 30 через линию связи 31. Компрессор 30 приводит в действие пневматический захват (не показан), а насос 28 приводит в действие набор гидравлических ключей (не показаны). Насос 28 также приводит в действие цилиндры 42 и 44, которые соответственно удлиняют и поворачивают подъемный кран 40, чтобы по выбору установить подъемный кран 40 в рабочее положение, как показано на фиг.1, и в нижнее положение, как показано на фиг.2. В рабочем положении подъемный кран 40 направлен вверх, но его продольная ось 54 смещена от вертикали под углом 56. Угловое смещение обеспечивает доступ блока 38 к стволу скважины 58 без взаимодействия с шарниром 60 подъемного крана. Благодаря угловому смещению 56 рама подъемного крана не служит препятствием для быстродействующего оборудования и перемещения многочисленных внутренних сегментов труб (известных как трубы, внутренняя колонна труб, насосные штанги или насосно-компрессорные трубы 62, в дальнейшем «трубы» или «насосные штанги»).
Отдельные трубные сегменты (колонны 62 на фиг.4) и насосные штанги скрепляются между собой с использованием гидравлического ключа. Термин «гидравлический ключ», использующийся здесь и далее, относится к любому гидравлическому инструменту, который может скреплять вместе две трубы или насосные штанги. Например, можно использовать инструмент, предоставленный компанией B.J.Hughes, Хьюстон, Техас. При работе насос 28 запускает гидравлический двигатель (не показан) вперед и назад с помощью клапана. По существу, двигатель запускает ведущее зубчатое колесо, которое поворачивает элемент трубного ключа относительно стыкового хомута. Элемент и стыковой хомут захватывают плоские грани на сопряженных соединительных муфтах насосных штанг или колонны 62 внутренних труб согласно одному представленному варианту реализации изобретения. Однако хорошо в пределах объема изобретения иметь вращающиеся зажимы трубного ключа или захватные устройства, которые прижимаются к круглой трубе (т.е. без плоскостей), подобные по своему характеру обычно применяемому трубному ключу, но с гидравлическим зажимом. Направление вращения двигателя определяет сборку или разборку соединительных муфт.
На фигурах подробно не показано, что при установке сегментов трубы 62 используется пневматическая плашка для захвата труб, чтобы поддерживать трубопровод 62, пока следующий сегмент трубы 62 навинчивается с применением трубных ключей. Компрессор 30 снабжает сжатым воздухом через клапан для быстрого скрепления и освобождения пневматической плашки. Резервуар помогает поддерживать постоянное давление воздуха. Датчик давления подает на монитор 48 (фиг.3) сигнал, который неявно указывает на то, что буровая установка 20 находится в рабочем состоянии.
Снова ссылаясь на фиг.1, следует указать, что нагрузка, приложенная к блоку 38, воспринимается прижимающим гидравлическим башмаком 92, который поддерживает подъемный кран 40. Гидравлический башмак 92 в принципе является поршнем в цилиндре (в качестве варианта - мембрана) так, как это обеспечивается компанией M.D.Totco, Cedar Park, Texas. Гидравлическое давление в гидравлическом башмаке 92 возрастает с возрастанием нагрузки на блок 38. На фиг.3 первый преобразователь 46 преобразовывает гидравлическое давление в сигнал 94 напряжения постоянного тока величиной 0-5 В, который передается в монитор 48. Монитор 48 преобразовывает сигнал 94 в цифровую форму, сохраняет его в запоминающем устройстве 96, увязывает его с отметкой реального времени и в результате передает данные в дистанционный компьютер 100 или компьютер 605 на фиг.6 посредством проводной системы, модема 98, линии связи T1, WiFi или другого устройства или способа передачи данных, известного специалистам.
На фиг.3 показаны преобразователи 46 и 102, связанные с монитором 48. Преобразователь 46 показывает давление на левом башмаке 92, и преобразователь 102 показывает давление на правом башмаке 92. Генератор 118, запускаемый двигателем 26, обеспечивает выходное напряжение, пропорциональное скорости двигателя. Это выходное напряжение прикладывается к делителю напряжения со сдвоенными резисторами, чтобы подать сигнал напряжением 0-5 В постоянного тока в точку 120, и затем подается на усилитель 122. Генератор 118 представляет только один из многих разнообразных тахометров, которые обеспечивают сигнал обратной связи, пропорциональный скорости двигателя. Другой пример тахометра предполагает наличие двигателя 26, запускающего генератор переменного тока и измеряющего его частоту. Преобразователь 80 создает сигнал, пропорциональный давлению гидравлического насоса 28 и, следовательно, пропорциональный крутящему моменту трубного ключа.
Схема 124 телефонного доступа, относящаяся к «POCKET LOGGER» (портативное устройство регистрации) Расе Scientific, Inc. Charlotte, N.C., содержит четыре входных канала 126, 128, 130 и 132; запоминающее устройство 96 и часы 134. Схема 124 периодически опрашивает входы 126, 128, 130 и 132 на выбираемой пользователем частоте выборки; оцифровывает данные считывания; сохраняет оцифрованные значения и сохраняет время суток, когда была осуществлена выборка входных данных. Специалистам следует принять во внимание, что при наличии соответствующей схемы может быть опрошено любое количество входов и данные по получении могут немедленно передаваться.
Оператор на компьютере 100, удаленном от рабочего места, где работает установка 20 для ремонта скважин, осуществляет доступ к данным, сохраняемым в схеме 124, с помощью модема 98 на базе ПК и сотового телефона 136 или других известных способов передачи информации. Телефон 136 считывает данные, через линии связи 138 (отраслевой телефонный стандарт RJ11) и передает данные на модем 98 с помощью антенн 140 и 142, в другом варианте данные передаются с помощью кабельного модема или системы WiFi (не показанной). В одном варианте реализации настоящего изобретения телефон 136 содержит CELLULAR CONNECTION.TM (систему сотового соединения), предоставляемую Motorola Incorporated of Schaumburg, Ш. (модель S1936C для сотовых приемопередатчиков серии 11 и модель S1688E для более старых сотовых приемопередатчиков).
Некоторые детали, касающиеся монитора 48, которые важно отметить, заключаются в том, что доступ к нему с помощью модема делает монитор 48 практически недоступным для персонала на рабочем месте. Однако систему можно легко модифицировать, чтобы предоставить персоналу возможность обрабатывать или корректировать передаваемые данные. Усилители 122, 144, 146 и 148 создают условия для своих входных сигналов, чтобы обеспечить соответствующие входы 126, 128, 130 и 132, имея подходящий диапазон мощности и амплитуды. Достаточная величина мощности необходима для RC-цепей 150, которые в течение короткого периода (например, 2-10 секунд) поддерживают амплитуду входов 126, 128, 130 и 132 даже после того, как выходы преобразователей 46, 102 и 80 и выход генератора 118 уменьшаются. Это гарантирует захват коротких выбросов без осуществления выборки и сохранения избыточного количества данных. Источник питания постоянного тока 152 подает чистое и точное напряжение возбуждения на преобразователи 46, 102 и 80, а также питает схему 124 соответствующим напряжением с помощью делителя 154 напряжения. Датчик давления 90 включает источник питания 152 с помощью реле 156, контакты которого замыкаются посредством катушки индуктивности 160, возбуждаемой батареей 162. На фиг.4 представлено изображение передвижной установки 20 для ремонта скважин, опускающей колонну 62 труб, как показано стрелкой 174 на фиг.4.
Фиг.5 показывает методологию операции захвата в виде таблицы в соответствии с одним вариантом реализации изобретения. Согласно фиг.5 оператор сначала выбирает идентификатор операций для его/ее предстоящей работы. Если выбран режим «ОБЩИЙ», то тогда оператор должен выбрать одно из положений буровой установки вверх/вниз, поднятие/спуск насосно-компрессорных труб или насосных штанг или вынос/затаскивание насосно-компрессорных труб и насосных штанг (опции не показаны на фиг.6). Если выбран режим «ПОРЯДОК ДЕЙСТВИЙ: ВНУТРЕННИЙ», то тогда оператор должен выбрать монтаж или демонтаж вспомогательной установки для технического обслуживания, длинный ход поршня, содержание парафина, монтаж/демонтаж противовыбросового превентора (ВОР), ловильные работы в скважине, работы ясом, свабирование, приток в ствол скважины, бурение, очистка скважины, операции глушения скважины, такие как заглушка скважины или прокачивание жидкости, поднятие насосов, установка/снятие трубного якоря, установка/снятие пакера и вынос/затаскивание утяжеленных бурильных труб и/или других устройств. Наконец, если выбран режим «ПОРЯДОК ДЕЙСТВИЙ: ВНЕШНИЙ», то оператор должен выбрать операции, выполняемые третьей стороной, такие как монтаж или демонтаж вспомогательного оборудования для ремонта, возбуждение скважины, цементирование, каротаж, перфорирование или технический контроль скважины и другие общие работы по обслуживанию, выполняемые третьей стороной. После того как операция идентифицирована, она классифицируется. Для всех классификаций, кроме «ВЫПОЛНЯЕМАЯ ЗАДАЧА: ПОРЯДОК ДЕЙСТВИЙ», выбирается идентификатор отклонений и затем происходит классификация с использованием классификационных величин отклонений.
Фиг.6 представляет вид интерфейса оператора буровой установки или интерфейс супервизора согласно одному варианту реализации настоящего изобретения. В соответствии с фиг.6 все, что требуется от оператора, состоит в том, что он или она вводит данные операций в компьютер 605. Оператор может взаимодействовать с компьютером 605, используя разнообразные средства, включающие в себя набор на клавиатуре 625 или использование сенсорного экрана 610. В одном варианте реализации дисплей с сенсорным экраном 610 с программными экранными кнопками, такими как извлечение насосных штанг или насосно-компрессорных труб из ствола скважины 615, предоставляются оператору, как показано на фиг.6, что позволяет оператору без труда выбрать операцию из группы программных кнопок. Например, если оператору предоставлен дисплей 610, изображенный на фиг.6, то по прибытии на буровую площадку оператор должен сначала нажать кнопку «МОНТАЖ». Затем оператор должен выбрать, например, «УСТРОЙСТВО ОБСЛУЖИВАНИЯ», «УСТРОЙСТВО ВСПОМОГАТЕЛЬНОГО ОБСЛУЖИВАНИЯ» или «ТРЕТЬЯ СТОРОНА». Затем оператор должен выбрать, чтобы операция или выполнялась, или исключалась, как описано выше. Кроме того, как показано на фиг.6, перед извлечением (перемещением) 615 или опусканием (установкой) насосных штанг 62 оператор может устанавливать верхний и нижний предел для блока 38 путем нажатия кнопок установки вверх и установки вниз после передвижения блока 38 в надлежащее положение.
Согласно фиг.7 представлена блок-схема системы мониторинга скорости блока в установке для подземного ремонта скважин на базе заданной работы и регулирования скорости блока 38 посредством скорости двигателя, если достигнута максимально допустимая скорость для данной работы, в соответствии с одним вариантом реализации настоящего изобретения. Как показано на фиг.7, система 700 содержит устройство ввода 705, связанное с положением дроссельной заслонки, установленным оператором (далее - устройство ввода дроссель-оператор), аналого-цифровой преобразователь 710, устройство оценки скорости 715, компьютер 605, контроллер 720 двигателя и управляющее реле 725. В одном примере варианта реализации система разработана так, что является совместимой с управляемыми с помощью электроники двигателями, такими как двигатель 26 буровой установки 20.
Устройство ввода 705 дроссель-оператор соединено с аналого-цифровым преобразователем 710 для передачи данных. С устройства ввода 705 дроссель-оператор подается давление воздуха в диапазоне между 0-120 фунтов на квадратный дюйм (psi) на аналого-цифровой преобразователь 710 на основании того положения, в которое оператор буровой установки устанавливает дроссельную заслонку для двигателя 26. Хотя настоящее изобретение описывается с точки зрения использования давления воздуха для определения положения дроссельной заслонки, специалисты понимают, что могут применяться другие способы в пределах объема изобретения, включая, но не ограничивая этим, регулирование потенциометром или реостатом, которые не показаны, но хорошо известны в технике, В другом варианте реализации можно определить положение дроссельной заслонки и с помощью устройства ввода 705 дроссель-оператор подать сигнал в цифровой форме, благодаря чему устраняется необходимость использования аналого-цифрового преобразователя 710.
Аналого-цифровой преобразователь 710 соединен с возможностью передачи данных с устройством ввода 705 дроссель-оператор, устройством 715 оценки скорости, управляющим реле 725 и электронным контроллером 720 двигателя. В одном варианте реализации изобретения аналого-цифровой преобразователь 710 формирует напряжение постоянного тока между одним и пятью вольтами на основании входных данных с устройства ввода 705 дроссель-оператор, чтобы получить желаемую рабочую скорость 735 для двигателя 26 и соответственно блока 38 буровой установки 20. Устройство 715 оценки скорости соединено с аналого-цифровым преобразователем 710, входом 730 кодового датчика, компьютером 605 и электронным контроллером 720 двигателя. Устройство 715 оценки скорости получает сигнал, представляющий скорость блока 38, со входа 730 кодового датчика. В одном варианте реализации изобретения вход 730 кодового датчика представляет собой входные данные с передвижного приводного устройства, который может быть четырехразрядным кодовым датчиком с приводным барабаном, датчиком Холла, установленным около движущегося узла, такого как подъемник 36, или любого другого устройства, которое будет подавать пропорциональный сигнал на основании скорости блока 38 или подъемника 36.
Устройство 715 оценки скорости также принимает входные данные с компьютера 605 в виде задачи, подлежащей выполнению. В одном варианте реализации изобретения задача, подлежащая выполнению или выполняемая на данный момент, вводится оператором буровой вышки на сенсорном экране 610. В другом варианте компьютер 605 может оценить некоторые входные данные буровой установки 20, как описано в патентной заявке США №11/518.701, полное содержание которой включено в виде ссылки, чтобы определить операции, выполняемые на буровой установке 20 без вмешательства оператора. Кроме того, устройство 715 оценки скорости получает входные данные с аналого-цифрового преобразователя 710 в виде сигнала от одного до пяти вольт постоянного тока, представляющего положение дроссельной заслонки. В одном варианте реализации устройство 715 оценки скорости может быть компьютером, процессором, микропроцессором или другим подобным устройством. Устройство 715 оценки скорости может получать задачу, подлежащую выполнению, текущую скорость блока 38 и скорость, заданную оператором, в виде данных устройства ввода 705 дроссель-оператор и определять, достигнута ли максимально допустимая скорость блока 38 на основании заданной задачи. Устройство 715 оценки скорости может выдавать сигнал 740 от одного до пяти вольт постоянного тока в электронный контроллер 720 двигателя для регулирования скорости двигателя 26 и, таким образом, скорости блока 38 в зависимости от того, достигнута ли максимально допустимая скорость для данной задачи.
Электронный контроллер 720 двигателя соединен с управляющим реле 725, устройством 715 оценки скорости и двигателем 26. В одном варианте реализации электронный контроллер 720 двигателя регулирует состав топливо-воздушной смеси для двигателя 26 на основании требуемой скорости двигателя 26, которая определяется внешним входом, таким как с аналого-цифрового преобразователя 710 или устройства 715 оценки скорости. Как только устройство 715 оценки скорости определит, должна ли регулироваться скорость, и сформирует сигнал для скорости двигателя 26 на основании нескольких входов, электронный контроллер 720 двигателя может принимать сигнал из устройства 715 оценки скорости и регулировать скорость двигателя 26 буровой установки 20.
В одном варианте реализации вышеописанная система 700 может действовать таким образом, что если требуемая рабочая скорость от оператора 735 буровой установки меньше, чем максимально допустимая скорость блока буровой установки 20, то устройство 715 оценки скорости позволит оператору посредством устройства ввода 705 дроссель-оператор осуществлять полное управление скоростью блока с помощью двигателя 26. И наоборот, если требуемая рабочая скорость, полученная от оператора 735 буровой установки, больше, чем максимально допустимая скорость блока для данной задачи, то устройство 715 оценки скорости посылает сигнал в электронный контроллер 720 двигателя, который отличается от сигнала, посылаемого с устройства ввода 705 дроссель-оператор через аналого-цифровой преобразователь 710, который ограничивает скорость двигателя 26, и следовательно, скорость блока 38 до максимально допустимой скорости.
Хотя это не показано, устройство 715 оценки скорости может также принимать на вход данные о нагрузке на крюке для нагрузки на блок 38 или полной нагрузки на буровую установку 20. Входные данные о нагрузке на крюке могут генерироваться на основании сигнала от гидравлического башмака 92 или любого другого технического средства измерения нагрузки на крюке или нагрузки буровой установки. В качестве варианта нагрузку на буровую установку или на крюке можно определить на основании оценки данных нагрузки на буровую установку, как описано в патентной заявке США 11/516105, поданной 8 сентября 2006 г., полное содержание которой включено здесь в качестве ссылки.
В конкретных вариантах реализации изобретения максимально допустимая скорость может являться не только функцией задачи, подлежащей выполнению, но также может регулироваться или обеспечиваться на основании величины нагрузки на крюк, нагрузки на буровую установку или количества насосно-компрессорных труб 62 в скважине 58. Например, при извлечении труб 62 из скважины 58 максимально допустимая скорость может быть установлена четыре фута в секунду, когда нагрузка на крюк высокая или много труб 62 все еще остается в скважине. Однако когда нагрузка на крюк ниже пяти тысяч фунтов или в скважине 58 находится меньше чем одна тысяча футов насосно-компрессорных труб 62, то максимально допустимая скорость может быть установлена два фута в секунду.
Хотя это не показано на фиг.7, система 700 может также содержать предохранительный клапан, такой как электрический предохранительный клапан, в нагнетательном трубопроводе к приводному цилиндру блокировки (не показан) для системы блокировки коробки передач. Типовая автоматическая коробка передач 32 содержит преобразователь крутящего момента, который обеспечивает проскальзывание между двигателем 26 и коробкой передач 32. Этот преобразователь крутящего момента позволяет двигателю 26 поднять скорость или мощность в лошадиных силах при подъеме тяжелого груза. Внутренней по отношению к коробке передач 32 является система блокировки, которая в одном варианте выполнения является механической муфтой с прямым зацеплением. При поднятии груза и когда скорость двигателя в оборотах в минуту (rpm) совпадает со скоростью ведущего вала коробки передач в оборотах в минуту (rpm), то коробка передач 32 больше не нуждается в проскальзывании преобразователя крутящего момента. С этой точки зрения коробка передач входит в зацепление с блокировочной муфтой путем приложения гидравлического давления к цилиндру, тем самым снимая преобразователь крутящего момента с приводного механизма. В определенных ситуациях функция блокировки может быть опасной, если при ее выполнении буровая установка 20 втягивает насосно-компрессорные трубы 62 в неожиданное препятствие в скважине 58 или в клинья для захвата труб, оборудование 186 устья скважины или противовыбросовый превентор. В этих ситуациях при блокирующем зацеплении механический момент двигателя 26 и приводного механизма передается без проскальзывания к лебедке 36 и увеличивает шанс извлечения насосно-компрессорных труб отдельно. В этом варианте реализации устройство 715 оценки скорости может быть запрограммировано на отключение системы блокировки в коробке передач 32 посредством передачи сигнала на электрический предохранительный клапан, при этом обеспечивается проскальзывание в коробке передач 32.
Фиг.8 представляет изображение 800 скорости блока в зависимости от положения дроссельной заслонки на основании давления воздуха из устройства ввода 705 дроссель-оператор в соответствии с одним вариантом реализации настоящего изобретения. В соответствии с фиг.1, 4, 7 и 8 изображение 800 содержит график скорости блока. График скорости блока содержит последовательность точек скорости блока на основании, например, входного давления воздуха оператора с устройства ввода 705 дроссель-оператор на буровой установке 20. Хотя из графика видно, что точки измерения скорости блока регистрируются на постоянной основе, можно взять точки на графике через определенные интервалы и формировать кривую или линию на основании средних значений за период между точками данных. Ось Х графика 800 скорости блока представляет давление воздуха в фунтах на квадратный дюйм с устройства ввода 705 дроссель-оператор. Ось Y графика 800 скорости блока представляет скорость блока в футах в секунду (FPS).
С целью пояснения график 800 содержит в качестве примера две линии 805 и 835. В соответствии с линией 805 скорости с возрастанием давления воздуха скорость блока соответственно возрастает до точки 815, где устройство 715 оценки скорости начинает регулирование скорости блока 38 в результате того, что максимально допустимая скорость уже достигнута для данной задачи. Поскольку после точки 815 давление воздуха продолжает расти на основании устройства ввода 705 дроссель-оператор, характеристика 805 скорости представляется двумя отдельными линиями: линией 810, представляющей скорость, которую блок 38 достиг бы без введения в действие функции регулирования скорости, и линией 820, которая представляет скорость блока 38, поддерживаемую на максимально допустимой скорости для данной задачи, даже хотя давление воздуха продолжает расти.
В другом примере на характеристике 835 скорости видно, что по мере возрастания давления воздуха скорость блока соответственно возрастает до точки 845, где устройство 715 оценки скорости начинает регулировать скорость блока 38 в результате того, что уже достигнута максимально допустимая скорость для данной задачи. Поскольку после точки 845 давление воздуха продолжает расти на основании устройства ввода 705 дроссель-оператор, то характеристика 835 скорости представляется двумя отдельными линиями: линией 840, которая представляет скорость, которую блок 38 достиг бы без введения в действие функции регулирования скорости, и линией 850, которая представляет скорость блока 38, поддерживаемую на максимально допустимой скорости для данной задачи, даже хотя давление воздуха продолжает расти. На основании характеристик 805 и 835 скорости блока на графике 800 в диапазоне 825 давления оператор имел бы полное управление скоростью блока 38. Однако в диапазоне 830 давления оператор управлял бы скоростью блока только ниже максимально допустимого значения. Любая попытка оператора увеличить скорость блока приведет к тому, что блок 38 продолжит работу на максимально допустимой скорости.
Процессы в соответствии с вариантами реализации настоящего изобретения будут рассмотрены со ссылкой на фиг.9 и 10. Определенные этапы процессов, описанных ниже, должны обязательно предварять другие в настоящем изобретении, чтобы выполнять функции в соответствии с описанием. Однако настоящее изобретение не ограничивает порядок описываемых этапов, если такой порядок или последовательность не изменяет функциональные возможности настоящего изобретения нежелательным образом. А именно, это означает, что некоторые этапы могут выполняться перед или после других этапов или параллельно с другими этапами в пределах объема и сущности настоящего изобретения. Более того, поскольку настоящее изобретение будет описано на примере по отношению к буровой установке 20, то понятно, что процессы не ограничены применением только к буровой установке 20, а могут использоваться для других типов механического оборудования, относящегося к скважинам, и в оборудовании или отрасли промышленности, не относящейся к скважинам.
На фиг.9 представлена логическая блок-схема, иллюстрирующая способ 900 ограничения максимальной скорости блока на основании задачи, подлежащей выполнению, в соответствии с одним вариантом реализации настоящего изобретения. Согласно фиг.1, 4, 6, 7 и 9 способ 900 начинается с этапа ПУСК и продолжается до этапа 905, на котором принимается информация о задаче, подлежащей выполнению или выполняемой, в одном варианте реализации информация о задаче вводится оператором на компьютер 605 с помощью сенсорного экрана 610. Например, перед извлечением насосно-компрессорных труб 62 оператор буровой установки может выбрать опцию 615 извлечения на компьютере 605. В другом варианте реализации компьютер 605 может оценивать различные входные данные с буровой установки 20, как это описано в патентной заявке США 11/518701, с целью определения операции, подлежащей выполнению на буровой установке 20 без вмешательства оператора.
На этапе 910 определяется максимально допустимая скорость для данной задачи. В одном варианте реализации максимально допустимая скорость для каждой задачи является заданной величиной, сохраняемой в компьютере 605 и/или устройстве 715 оценки скорости. В другом варианте максимально допустимая скорость может быть получена как входные данные, введенные оператором на компьютере 605 на буровой установке 20. Хотя пример варианта реализации описан для максимально допустимой скорости, каждая задача может иметь один или более ограничений максимально допустимой скорости в зависимости от различных условий, таких как нагрузка на буровую установку, нагрузка на крюк, состояние скважины, количество насосно-компрессорных труб 62, штанг или других труб, остающихся в скважине 58, тип оборудования, применяемого при работе, например тип буровой установки 20 или другие факторы, известные специалистам. Например, буровая установка 20, извлекающая насосно-компрессорные трубы 62 из скважины 58, как правило, имеет максимально допустимую скорость величиной четыре фута в секунду. Однако если нагрузка на крюк меньше пяти тысяч фунтов и/или длина насосно-компрессорных труб, находящихся в скважине 58, около одной тысячи линейных футов, то максимально допустимая скорость может быть установлена равной два фута в минуту. В другом примере извлечение буровых штанг буровой установкой из скважины 58 может в общем случае иметь максимально допустимую скорость, равную восьми футам в секунду. Однако если нагрузка на крюк меньше пяти тысяч фунтов и или длина насосно-компрессорных труб 62, остающихся в скважине 58, приблизительно две тысячи футов, то максимально допустимая скорость может быть установлена равной три фута в минуту. Более того, максимально допустимая скорость может быть рассчитана так, что она корректируется на компьютере 605 или в устройстве 715 оценки скорости. Корректировка максимально допустимых скоростей может зависеть от требований заказчика, текущих условий или опыта оператора буровой установки.
На этапе 915 принимается информация о положении дроссельной заслонки. В одном варианте реализации информация о положении дроссельной заслонки принимается с устройства ввода 705 дроссель-оператор через аналого-цифровой преобразователь 710 в устройстве 715 оценки скорости. На этапе 920 устройство 715 оценки скорости принимает информацию о скорости блока 38, в одном варианте реализации скорость блока 38 принимается с приводимого в движение барабаном четырехразрядного преобразователя на лебедке 36, датчика Холла, установленного рядом с подвижным элементом между лебедкой 36 и блоком 38, или любого другого устройства, которое обеспечивает ввод соответствующего сигнала в зависимости от скорости блока 38 или лебедки 36. На этапе 925 производится запрос для определения того, должна ли скорость блока 38 быть увеличена на основании данных устройства ввода 705 дроссель-оператор. Если нет, то ветвь «НЕТ» переходит к этапу 930.
На этапе 930 производится запрос для определения того, является ли скорость блока ниже максимально допустимой скорости. В одном варианте это определение может осуществляться в устройстве 715 оценки скорости путем сравнения текущих входных данных из преобразователя 730 с сохраняемой максимально допустимой скоростью для операции, подлежащей выполнению. Если скорость на данный момент ниже максимально допустимой скорости, то ветвь «ДА» переходит к этапу 935, на котором оператору буровой установки 20 предоставляется полное управление скоростью блока. Процесс может затем вернуться от этапа 935 к этапу 915, чтобы продолжить анализ положения дроссельной заслонки. С другой стороны, если скорость блока в данный момент не ниже максимально допустимой скорости, то ветвь «НЕТ» переходит к этапу 940.
На этапе 940 производится запрос для определения того, должен ли вход дроссельной заслонки уменьшать скорость блока ниже максимально допустимой скорости, если нет, то ветвь «НЕТ» переходит к этапу 945, на котором управляющее реле 725 остается включенным, и скорость поддерживается на уровне максимально допустимой. На данном этапе оператор не имеет полного функционального управления скоростью блока. Процесс возвращается от этапа 945 к этапу 915 с целью продолжения мониторинга положения дроссельной заслонки. Возвращаемся к этапу 940. Если вход дроссельной заслонки должен уменьшать скорость блока ниже максимально допустимой скорости, то ветвь «ДА» переходит к этапу 935, на котором управляющее реле 725 выключено, если скорость двигателя 26 падает так, что скорость блока 38 будет ниже максимально допустимой скорости, и оператору предоставляется управление скоростью блока ниже максимально допустимой скорости. Процесс возвращается от этапа 935 к этапу 915 для продолжения анализа положения дроссельной заслонки.
Возвращаемся к этапу 925. Если скорость блока 38 возрастает в зависимости от положения дроссельной заслонки, то ветвь «ДА» переходит к этапу 950. На этапе 950 производится запрос для определения того, находится ли скорость блока 38 в данный момент на максимально допустимой. Если так, то ветвь «ДА» следует к этапу 955, на котором управляющее реле 725 сохраняется во включенном положении, и скорость блока 38 поддерживается на уровне максимально допустимой скорости. С другой стороны, если скорость блока 38 не находится в данный момент на уровне максимально допустимой скорости, то ветвь «НЕТ» следует к этапу 960. На этапе 960 производится запрос для определения, делает ли возрастание скорости, запрашиваемое оператором на основании положения дроссельной заслонки, скорость блока 38 выше максимально допустимой скорости. Если нет, то ветвь «Нет» следует к этапу 965, на котором оператору предоставляется свободное управление скоростью блока посредством применения дроссельной заслонки. Процесс продолжается от этапа 965 к этапу 915 для продолжения мониторинга положения дроссельной заслонки. С другой стороны, если скорость блока достигнет максимально допустимого значения и будет его превышать на основании положения дроссельной заслонки, то ветвь «ДА» последует к этапу 970. На этапе 970 оператору предоставляется право регулировать скорость блока до максимально допустимой посредством дроссельной заслонки. Когда максимально допустимая скорость достигнута, управляющее реле 725 срабатывает и устройство 715 оценки скорости посылает сигнал 740 на электронный контроллер 720 двигателя, который поддерживает скорость блока 38 на максимально допустимом уровне. Процесс переходит к этапу 915 для продолжения мониторинга положения дроссельной заслонки.
На фиг.10 представлена логическая блок-схема, иллюстрирующая способ 1000 ограничения максимальной скорости блока и выключения блокировки коробки передач 32 на основании задачи, подлежащей выполнению, и нагрузки на буровую установку, в соответствии с одним вариантом реализации настоящего изобретения. Согласно фиг.1, 4, 6, 7, 9 и 10 способ 1000 начинается на этапе «ПУСК» и продолжается до этапа 1005, на котором принимается информация о задаче, подлежащей выполнению или выполняемой на данный момент, в одном варианте эта задача вводится оператором на компьютере 605 с помощью сенсорного экрана 610. Например, перед извлечением насосно-компрессорных труб 62 оператор буровой установки может выбрать опцию 615 извлечения на компьютере 605. В другом варианте компьютер 605 может оценивать данные нескольких входов буровой установки 20, такие как описано в патентной заявке США, порядковый №11/518701, для определения операции, выполняемой на буровой установке без вмешательства оператора.
На этапе 1010 определяется максимально допустимая скорость, в одном варианте максимально допустимая скорость для каждой задачи является заданной величиной, сохраняемой в компьютере 605 или/и устройстве 715 оценки скорости. В другом варианте максимально допустимая скорость может быть получена как входная информация от оператора буровой установки 20 на компьютере 605. Хотя пример варианта реализации описан для максимально допустимой скорости, каждая задача может иметь одно или более ограничений максимально допустимой скорости в зависимости от различных условий, таких как нагрузка на буровую установку, нагрузка на крюк, состояние скважины, количество насосно-компрессорных труб 62, штанг или других труб, остающихся в скважине 58, тип оборудования, применяемого при работе, например тип буровой установки 20 или другие факторы, известные специалистам.
На этапе 1015 производится запрос для определения, зависит ли максимально допустимая скорость от нагрузки на буровую установку или нагрузки на крюк буровой установки 20. Если нет, то ветвь «НЕТ» проходит к этапу 915 на фиг.9 и по существу процесс происходит так, как описано на фиг.9. В другом случае ветвь «ДА» проходит к этапу 1020, на котором оценивается нагрузка на крюк или на буровую установку. Данные по нагрузке на крюк или на буровую установку могут быть получены на основании сигнала от гидравлической опоры 92 или любых других технических средств, известных специалистам, таких как датчики силы, включая, но не ограничивая этим, тензометрические датчики, индикатор нагрузки с линейной шкалой и подобные. В другом варианте нагрузка на крюк или буровую установку может определяться на основании оценки данных по нагрузке, как описано в патентной заявке США 11/516105, поданной 8 сентября 2006 г., полное содержание которой включено в данное описание в качестве ссылки. Информация о нагрузке может быть принята на компьютере 605 и/или в устройстве 715 оценки скорости для анализа и сравнения с максимально допустимой скоростью.
На этапе 1025 производится запрос определения того, достигла ли нагрузка на крюк или на буровую установку заданной величины. Например, как описано выше, при извлечении буровой вышкой насосно-компрессорных труб 62 из скважины 58 максимально допустимая скорость может быть уменьшена от четырех футов в секунду до двух футов в секунду, когда нагрузка на крюк падает ниже пяти тысяч фунтов. Если величина заданной нагрузки на крюк или буровую установку не достигнута, то ветвь «НЕТ» следует обратно к этапу 1020 с целью продолжения оценки нагрузки на крюк. С другой стороны, если уровень заданной нагрузки на крюк или на буровую установку достигнут, то ветвь «ДА» следует к этапу 1030, на котором верхняя граница скорости блока ограничена максимально допустимой скоростью, когда оператор пытается увеличить скорость блока 38 выше максимально допустимой скорости. Процесс поддержания скорости блока на или ниже максимально допустимой скорости по существу такой же, как описано на фиг.9. На этапе 1035 устройство 715 оценки скорости может передавать сигнал выключения системы блокировки для коробки передач. В одном варианте реализации этот сигнал может приводить в действие предохранительный клапан, например электрический предохранительный клапан в отношении давления для цилиндра блокировки системы блокировки коробки передач. На этапе 1040 устройство 715 оценки скорости продолжает мониторинг положения дроссельной заслонки с помощью устройства ввода 705 дроссель-оператор для определения того, существует ли необходимость ограничения скорости до максимально допустимой величины. Процесс продолжается от этапа 1040 до этапа 1030 для дальнейшей оценки положения дроссельной заслонки в зависимости от максимально допустимой скорости для данной задачи и нагрузки на буровую установку или на крюк.
Хотя изобретение описано со ссылкой на предпочтительные варианты реализации изобретения, специалистам понятно, что возможны различные модификации в пределах объема изобретения. Поэтому объем изобретения определяется исходя из нижеследующей формулы изобретения. Из предшествующего описания понятно, что в варианте реализации настоящего изобретения устранен недостаток прототипа. Специалистам ясно, что настоящее изобретение не ограничено каким-либо конкретно рассмотренным вариантом применения, а также что описанные в данном документе варианты реализации имеют иллюстративный характер, а не ограничительный. Из описания примеров реализации изобретения следует, что равноценные заменители описанных здесь элементов могут быть предложены самими специалистами, а также способы создания других вариантов реализации настоящего изобретения могут быть предложены самими практиками в данной области техники. Следовательно, объем данного изобретения ограничен только пунктами нижеприведенной формулы изобретения.
Изобретение относится к области грузоподъемных механизмов и предназначено для регулирования скорости грузозахватного устройства. Система для осуществления способа регулирования скорости блока содержит датчик дроссельной заслонки, датчик скорости блока, дисплей ввода задачи, устройство оценки скорости, электронный контроллер двигателя. При регулировании скорости блока на буровой установке, когда положение дроссельной заслонки указывает, что оператор пытается увеличить скорость грузозахватного устройства, текущее значение скорости грузозахватного устройства сравнивается с максимально допустимой скоростью и двигатель обеспечивает повышение скорости грузозахватного устройства только до максимально допустимой величины, в этом случае управление оператором скоростью грузозахватного устройства ограничивается операцией уменьшения скорости грузозахватного устройства. Достигается регулирование скорости грузозахватного устройства. 4 н. и 18 з.п. ф-лы, 10 ил.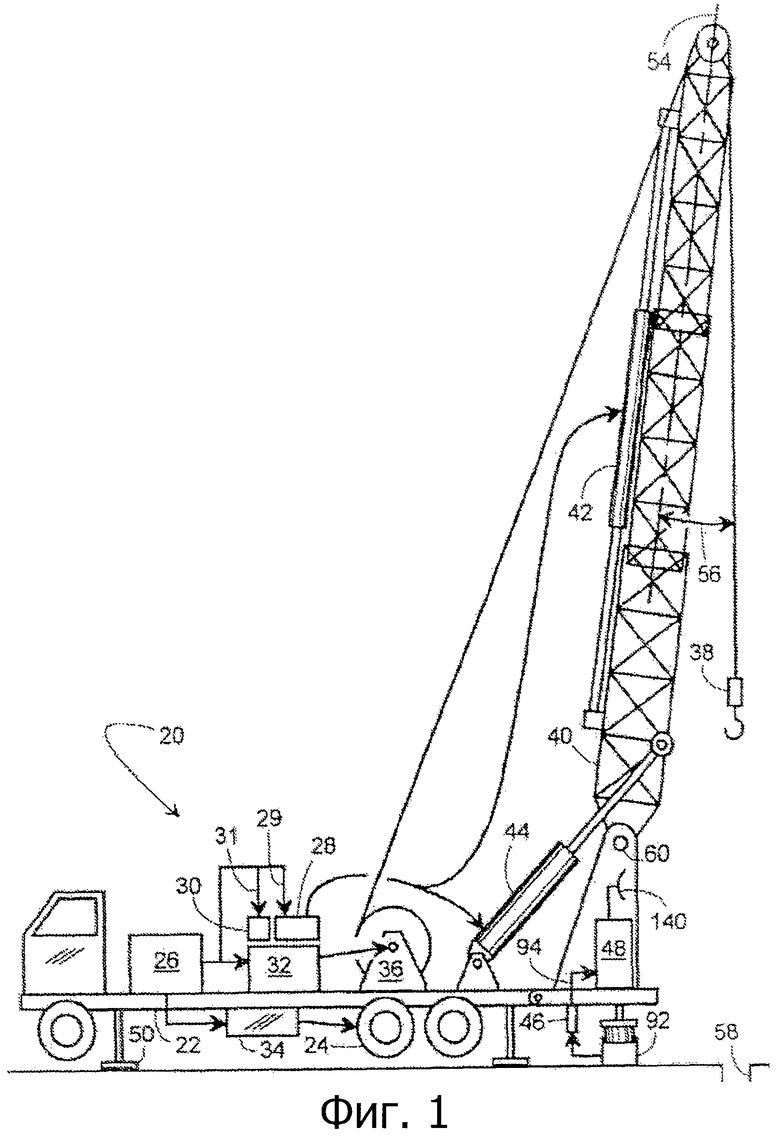
1. Способ регулирования скорости блока на буровой установке, включающий этапы, на которых: получают данные о скорости блока; получают входные данные по дроссельной заслонке, которые формируют изменение скорости блока; определяют, выполняется ли условие, что входные данные по дроссельной заслонке будут формировать изменение скорости блока, при котором скорость блока будет выше максимально допустимой скорости; и ограничивают скорость блока до величины, по существу, равной максимально допустимой скорости, при выполнении указанного условия, что входные данные по дроссельной заслонке формируют изменение скорости блока, при котором скорость блока будет превышать максимально допустимую скорость.
2. Способ по п.1, дополнительно включающий этапы, на которых:
принимают задачу, которая должна выполняться буровой установкой; и
определяют максимально допустимую скорость на основании задачи, которая должна выполняться с помощью буровой установки.
3. Способ по п.1, дополнительно включающий этапы, на которых:
определяют задачу, выполняемую буровой установкой; и
определяют максимально допустимую скорость, на основании задачи, выполняемой буровой установкой.
4. Способ по п.3, в котором задачу определяют на основании оценки схемы распределения нагрузки буровой установки, содержащей данные о нагрузке на буровую установку.
5. Способ по п.1, дополнительно включающий этап, на котором в случае не выполнения условия, что входные данные по дроссельной заслонке будут формировать изменение скорости блока, при котором скорость блока будет превышать максимально допустимую скорость, обеспечивают регулирование скорости блока с помощью входных данных о дроссельной заслонке.
6. Способ по п.1, дополнительно включающий этапы, на которых: принимают задачу, которая должна выполняться буровой установкой; принимают данные о заданном весе груза на крюке и определяют максимально допустимую скорость на основании выполняемой задачи и заданного веса груза на крюке.
7. Способ по п.6, дополнительно включающий этапы, на которых: получают текущее значение веса груза на крюке; определяют, является ли текущее значение веса груза на крюке меньше, чем заданное значение веса груза на крюке; определяют, выполняется ли условие, что входные данные по дроссельной заслонке формируют изменение скорости блока, при котором скорость блока превышает максимально допустимую скорость; и препятствуют тому, чтобы входные данные по дроссельной заслонке увеличивали скорость блока выше максимально допустимой скорости в случае выполнения условия, что текущее значения веса груза на крюке меньше, чем заданное значение веса груза на крюке.
8. Способ по п.1, дополнительно включающий этапы, на которых: принимают задачу, которая должна выполняться; принимают заданное значение длины оборудования и определяют максимально допустимую скорость на основании выполняемой задачи и заданной длины оборудования.
9. Способ по п.8, дополнительно включающий этапы, на которых: получают текущее значение длины оборудования; определяют, является ли текущее значение длины оборудования меньше, чем заданное значение длины оборудования; определяют, выполняется ли условие, что входные данные по дроссельной заслонке будут формировать изменение скорости блока, при котором скорость блока превышает максимально допустимую скорость; и препятствуют тому, чтобы входные данные по дроссельной заслонке увеличивали скорость блока выше максимально допустимой скорости при выполнении условия, что текущее значение длины оборудования меньше, чем заданная длина оборудования.
10. Способ регулирования скорости блока на буровой установке для ремонта скважин, включающий этапы, на которых: принимают задачу, выполняемую буровой установкой; определяют максимально допустимую скорость блока на основании этой задачи; принимают входные данные по дроссельной заслонке, причем указанные входные данные формируют изменение скорости блока; принимают текущее значение скорости блока; определяют, выполняется ли условие, что входные данные по дроссельной заслонке формируют изменение текущего значения скорости блока, при котором текущее значение скорости блока превышает максимально допустимую скорость блока; и ограничивают скорость блока до значения, приблизительно равного максимально допустимой скорости, если выполняется условие, что входные данные по дроссельной заслонке формируют изменение текущего значения скорости блока, при котором текущее значение скорости блока превышает максимально допустимую скорость.
11. Способ по п.10, дополнительно включающий этап, на котором посредством входных данных по дроссельной заслонке регулируют скорость блока, если не выполняется условие, что входные данные по дроссельной заслонке формируют изменение текущего значения скорости блока, при котором текущее значение скорости блока превышает максимально допустимую скорость.
12. Способ по п.10, дополнительно включающий этапы, на которых: принимают заданное значение веса груза на крюке; определяют максимально допустимую скорость на основании выполняемой задачи и заданного значения веса груза на крюке; получают текущее значение веса груза на крюке; определяют, является ли текущее значение веса груза на крюке меньше, чем заданный вес груза на крюке; определяют, выполняется ли условие, что входные данные по дроссельной заслонке формируют изменение текущей скорости блока, при котором текущая скорость блока превышает максимально допустимую скорость; и препятствуют тому, чтобы входные данные по дроссельной заслонке увеличивали скорость блока выше максимально допустимой скорости, если выполняется условие, что текущее значение веса груза на крюке меньше, чем заданное значение веса груза на крюке.
13. Способ по п.12, дополнительно включающий этап, на котором выключают систему блокировки для коробки передач, приводящей в действие блок, в случае выполнения условия, что текущее значение веса груза на крюке меньше, чем заданный вес груза на крюке.
14. Способ по п.10, дополнительно включающий этапы, на которых: принимают заданное значение длины труб; определяют максимально допустимую скорость блока на основании выполняемой работы и заданного значения длины труб; получают текущее значение длины труб; определяют, является ли текущее значение длины труб меньше, чем заданное значение длины труб; определяют, выполняется ли условие, что входные данные по дроссельной заслонке формируют изменение текущего значения скорости блока, при котором текущее значение скорости блока превышает максимально допустимую скорость; и препятствуют тому, чтобы входные данные по дроссельной заслонке увеличивали скорость блока выше максимально допустимой скорости в случае выполнения условия, что текущее значение длины труб меньше, чем заданное значение длины труб.
15. Способ по п.14, дополнительно включающий этап, на котором выключают систему блокировки для коробки передач, приводящей в действие блок в случае выполнения условия, что текущее значение длины труб меньше, чем заданное значение длины труб.
16. Способ регулирования скорости блока на буровой установке для ремонта скважин, включающий этапы, на которых: принимают задачу, выполняемую буровой установкой; принимают заданное значение веса груза на крюке; определяют максимально допустимую скорость на основании выполняемой задачи и текущего значения веса груза на крюке; принимают входные данные по дроссельной заслонке, причем указанные входные данные формируют изменение скорости блока; принимают текущее значение веса груза; определяют, является ли текущее значение веса груза на крюке меньше, чем заданный вес груза на крюке; препятствуют тому, чтобы входные данные по дроссельной заслонке увеличивали скорость блока выше максимально допустимой скорости, если выполняется условие, что текущее значение веса груза меньше, чем заданный вес груза на крюке.
17. Система регулирования скорости блока на буровой установке для ремонта скважин, содержащая: датчик дроссельной заслонки, выполненный с возможностью обеспечивать входные данные положения дроссельной заслонки; датчик скорости блока, выполненный с возможностью обеспечивать сигнал, представляющий скорость блока; дисплей ввода задачи, связанный с возможностью передачи данных с устройством оценки скорости и обеспечивающий входные данные задачи для устройства оценки скорости; устройство оценки скорости, связанное с возможностью передачи данных с датчиком дроссельной заслонки, датчиком скорости блока и дисплеем ввода задачи, для приема сигнала, представляющего скорость блока, из датчика скорости блока, приема входных данных положения дроссельной заслонки из датчика дроссельной заслонки и приема входных данных задачи из дисплея ввода задачи; и электронный контроллер двигателя, связанный, с возможностью передачи данных с датчиком дроссельной заслонки и устройством оценки скорости и выполненный с возможностью приема входных данных регулировки скорости из устройства оценки скорости.
18. Система по п.17, в которой датчик дроссельной заслонки содержит: вход дроссельной заслонки, вызывающий переменное давление воздуха на основании позиционирования входа дроссельной заслонки; аналого-цифровой преобразователь для приема переменного давления воздуха и преобразования его в соответствующее напряжение.
19. Система по п.17, в которой датчик скорости блока содержит кодирующее устройство.
20. Система по п.17, в которой устройство оценки скорости выполнено с возможностью принимать напряжение в качестве указанных входных данных положения дроссельной заслонки от дроссельной заслонки, значение скорости в качестве указанного сигнала, представляющего скорость блока, от датчика скорости блока и задачу, выполняемую буровой установкой для ремонта скважин, в качестве указанных входных данных задачи, от дисплея ввода задачи.
21. Система по п.20, в которой устройство оценки скорости выполнено с возможностью определять максимально допустимую скорость на основании входных данных задачи и передавать сигнал, содержащий эдс вращения, в виде входных данных регулировки скорости на электронный контроллер двигателя на основании максимально допустимой скорости, указанных входных данных положения дроссельной заслонки и указанного сигнала, представляющего скорость блока.
22. Система по п.21, в которой эдс вращения меньше, чем указанное напряжение входных данных положения дроссельной заслонки, если значение скорости больше или равно указанной максимальной скорости.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| RU 2005111541 A, 10.10.2005. | |||

