Область техники, к которой относится изобретение
Область техники, в общем, относится к оборудованию, используемому для технического обслуживания скважин. Более конкретно, область примерных вариантов осуществления относится к анализу нагрузки для установки для технического обслуживания скважин и к данным нагрузки на оборудование к определенной нагрузке на крюк и другим пределам нагрузки в установке и к отслеживанию данных для определения, возникают ли состояния перегрузки на основе этих пределов.
Уровень техники
После того, как скважина пробурена, она должна быть закончена прежде, чем она сможет производить газ или нефть. После завершения в формации могут произойти различные события, которые приводят к необходимости ремонтных работ для скважины и ее оборудования. С целью настоящего применения ремонтные работы и операции "обслуживания" используются в их самом широком смысле и относятся к любому и всем действиям, выполняемым на или для скважины, для ремонта или восстановления работоспособности скважины, и также включают в себя такие действия, как закрытие или запечатывание скважины. Обычно операции ремонтных работ включают в себя такие операции, как замена изношенных или поврежденных частей (например, насосов, насосных штанг, труб, обсадных труб и уплотнительных сальников), применяя вторичные или третичные технологии восстановления, такие как химическая обработка или обработка горячей нефтью, цементирование скважины и каротаж скважины, помимо прочих. Операции технического обслуживания обычно выполняют с применением или использованием мобильной установки ремонтных работ или технического обслуживания скважины (совместно называемой "установкой для технического обслуживания скважины", "установкой для технического обслуживания" или "установкой"), которая адаптирована, помимо прочего, для извлечения из скважины колонны труб, штанг или обсадных труб (совместно называются ниже "трубами") и также опускания труб обратно в скважину. Как правило, такие установки для технического обслуживания мобильны, поэтому они могут перемещаться из одного местоположения в другое. Установка для технического обслуживания скважины также обычно включает в себя удлиняющийся подъемный мачтово-стреловой кран, оборудованный буровыми лебедками и блоками.
Во время извлечения труб оператор установки технического обслуживания обычно поднимает колонну труб (или штанг), которая затем удерживается на месте с помощью скользящих плашек (или подъемников для штанг), в то время как участок буровых труб отделяют от остального участка колонны труб или насосных штанг в скважине. Как только участок труб будет отделен от того, что все еще находится внутри скважины, этот участок труб может быть помещен на полати для операций с насосно-компрессорными трубами, на стеллаж для труб, или трубы могут быть установлены с опорой на буровую установку в определенном виде или определенным способом. Процесс, по существу, является обратным процессу опускания колонны труб. Во время операции подъема (извлечения из скважины или "РОН") или опускания (в процессе бурения скважины или "RIH") вес или нагрузка на крюк или блок (типично называется "нагрузкой на крюк") может в значительной степени изменяться в зависимости от веса колонны труб в скважине, условий внутри скважины, состояния колонны труб и величины ускорения колонны труб. Нагрузка на крюк может увеличиваться очень быстро до уровня, который превышает безопасный рабочий уровень бурильной установки. Хотя используется система сигналов тревоги, если оператор не сможет действовать достаточно быстро, буровая установка может быть повреждена, что угрожает безопасности рабочих вокруг скважины.
Кроме того, по мере того, как отрезки колонны труб извлекают из скважины, общая нагрузка на крюк со стороны колонный труб уменьшается. И, наоборот, по мере того, как отрезки колонны труб добавляют к текущей колонне труб и подают внутрь скважины, общая нагрузка на крюк увеличивается. В каждом случае, в то время как одно значение нагрузки на крюк может быть действительным на определенных участках бурения скважины, по мере того, как отношение общей нагрузки на крюк при предельной нагрузке на крюк на блоке изменяется, его действительность для защиты оператора бурильной установки, рабочих на платформе и самой бурильной установки может быть уменьшена.
Кроме того, поскольку нагрузка на крюк изменяется во время действий РОН или RIH, то же происходит с общим весом буровой установки (обычно называемым здесь "измеренным весом" для буровой установки). Измеренный вес обычно представляет собой комбинацию веса самой буровой установки, нагрузки на крюк и веса каких-либо труб, которые хранятся на стеллаже или установлены с опорой к бурильной установке. Типично установка для технического обслуживания скважины имеет ограничения по весу, с которым они могут работать. При выполнении действий RIH или РОН, измеряемый вес для установки может изменяться, и предел измеряемого веса для установки во время операции (называется здесь "пределом измеренного веса" или "MWL") может потребоваться регулировать во время выполнения действия.
Сущность изобретения
Настоящее изобретение направлено на управление работой установки для технического обслуживания скважины на основе данных нагрузки на установку. В результате устранения необходимости или при ограничении возможностей оператора в ситуациях повышенной нагрузки на установке для технического обслуживания скважины возможность предотвращения повреждения установки технического обслуживания и возникновения опасности для рабочих вокруг головки скважины могут быть улучшены.
В одном аспекте настоящего изобретения способ для управления нагрузкой на крюк установки для технического обслуживания скважины может начаться при приеме первого предельного значения нагрузки на крюк. Установка для технического обслуживания может выполнять один из множества циклов для действия на скважине и может принимать данные нагрузки на крюк при выполнении первого цикла. Каждое значение данных нагрузки на крюк, которое было принято, можно сравнивать с первым предельным значением нагрузки на крюк и, если это значение больше, чем первое предельное значение нагрузки на крюк, первый цикл действий может быть остановлен до его завершения. Первое значение нагрузки на крюк может быть определено, и вычислительная система может рассчитать второе предельное значение нагрузки на крюк на основе первого среднего значения нагрузки на крюк и значение допустимого дополнительного веса на крюке. Установка для технического обслуживания может выполнять второй цикл действий на скважине и может собирать второй набор значений данных нагрузки на крюк. Второй набор значений данных нагрузки на крюк можно затем сравнивать со вторым предельным значением нагрузки на крюк.
В другом аспекте настоящего изобретения способ для управления нагрузкой на крюк для устройства может быть начат путем выполнения первого цикла действий на скважине. Во время первого цикла первый набор значений данных, основанных на нагрузке, может быть принят вычислительной системой. Вычислительная система может определять предельное значение нагрузки на крюк для устройства на основе первого набора значений данных на основе нагрузки. Второй цикл действий может быть выполнен в устройстве, и второй набор данных на основе нагрузки может быть принят во время второго цикла. Второй набор данных на основе нагрузки затем сравнивают с пределом нагрузки на крюк.
Для еще одного аспекта настоящего изобретения способ для управления нагрузкой на крюк установки может начаться путем приема первого предельного значения нагрузки на крюк в вычислительной системе. Установка может выполнять один из множества циклов для выполнения действий на скважине и может принимать множество точек данных веса установки и точек, измеренных данных веса при выполнении первого цикла. Вычислительная система затем может определять множество значений данных нагрузки на крюк путем расчета различий измеренных данных веса и данных веса установки. Значения данных нагрузки на крюк могут быть сравнены с первым пределом нагрузки на крюк. Первый средний вес установки и первый средний измеренный вес могут быть затем определены с помощью вычислительной системы на основе множества точек данных веса установки и множества точек измеренных данных веса, соответственно. Первая средняя нагрузка на крюк может быть затем определена путем расчета в вычислительной системе разности первого среднего измеренного веса и первого среднего веса установки. Значение допустимого дополнительного веса на крюке может быть затем определено путем расчета разности первого предельного значения нагрузки на крюк и первого среднего значения нагрузки на крюк. Вычислительная система может рассчитать второе предельное значение нагрузки на крюк на основе первого среднего значения нагрузки на крюк и значения допустимого дополнительного веса на крюке. Установка может выполнять второй цикл действий на скважине и может собирать второй набор значений данных нагрузки на крюк. По меньшей мере, часть второго набора значений данных нагрузки на крюк затем можно сравнивать со вторым предельным значением нагрузки на крюк.
Эти и другие аспекты, цели, свойства и преимущества примерных вариантов осуществления будут понятны для специалистов в данной области техники при рассмотрении следующего подробного описания иллюстрируемых примерных вариантов осуществления, которые включают в себя наилучший способ выполнения изобретения в том виде, как оно воспринимается в настоящее время.
Краткое описание чертежей
Для более полного понимания примерных вариантов осуществления настоящего изобретения и его преимуществ, теперь будет сделана ссылка на следующее описание совместно с приложенными чертежами, на которых:
на фиг.1 показан вид сбоку примерной установки для технического обслуживания скважины с поднятой грузовой стрелой, вытянутой в соответствии с одним примерным вариантом осуществления;
на фиг.2 показан вид сбоку примерной установки для технического обслуживания скважины с убранной стрелой, в соответствии с одним примерным вариантом осуществления;
на фиг.3 показана электрическая схема цепи монитора в соответствии с одним примерным вариантом осуществления;
на фиг.4 показан примерный вид с одного конца подъемной стрелы установки для технического обслуживания скважины на взвешивающих площадках, в соответствии с одним примерным вариантом осуществления;
на фиг.5 иллюстрируется подъем и спуск колонны труб с помощью установки для технического обслуживания скважины, в соответствии с одним примерным вариантом осуществления;
на фиг.6 иллюстрируется один вариант осуществления методики активного захвата, кратко представленной в табличной форме, в соответствии с одним примерным вариантом осуществления;
на фиг.7 предоставлен вид спереди примерного интерфейса пользователя для операторов установки в соответствии с одним примерным вариантом осуществления;
на фиг.8 показана блок-схема последовательности операций примерного способа для автоматической установки и повторной установки пределов нагрузки на крюк и управления работой установки в отношении нагрузки на крюк, и предельных значений веса установки, в соответствии с одним примерным вариантом осуществления;
на фиг.9 показана блок-схема последовательности операций примерного процесса для приема исходных параметров для автоматизированной операции в соответствии с одним примерным вариантом осуществления;
на фиг.10 показана блок-схема последовательности операций примерного процесса для выполнения цикла обучения для автоматизированной операции ограничения нагрузки на крюк в соответствии с одним примерным вариантом осуществления;
на фиг.11 показана блок-схема последовательности операций примерного процесса определения, находится ли предложенный допустимый вес на крюке в пределах запаса безопасности для автоматизированной операции ограничения нагрузки на крюк в соответствии с одним примерным вариантом осуществления;
на фиг.12 показана блок-схема последовательности операций примерного процесса завершения выполнения рабочего цикла, для действий с использованием автоматизированной операции ограничения нагрузки на крюк в соответствии с одним примерным вариантом осуществления; и
на фиг.13 показана блок-схема последовательности операций примерного процесса для выполнения предельного цикла операций во время действий с использованием операции автоматизированного ограничения нагрузки на крюк в соответствии с одним примерным вариантом осуществления.
Подробное описание изобретения
Примерные варианты осуществления изобретения будут подробно описаны ниже со ссылкой на приложенные чертежи. Примерные варианты осуществления описаны со ссылкой на то, как они могут быть воплощены. С целью ясности изложения, не все свойства фактического воплощения описаны здесь. Для специалистов в данной области техники будет понятно, что при разработке фактических вариантов осуществления, ряд решений, специфичных для воплощения, требуется принять для достижения конкретных целей, таких как соответствие ограничениям, относящимся к системе и к деловой активности, которые могут изменяться в зависимости от варианта выполнения. Кроме того, следует понимать, что такие попытки развития могут быть сложными и требуют значительного времени, но, тем не менее, представляют собой обычные обязанности для специалистов в данной области техники, использующих с пользой данное раскрытие. Дополнительные аспекты и преимущества различных примерных вариантов осуществления будут понятны при рассмотрении следующего описания и чертежей.
Кроме того, один или больше аспектов примерных вариантов осуществления могут включать в себя вычислительную программу и/или вычислительную систему, которая воплощает функции, описанные и иллюстрируемые здесь, в которой вычислительная программа воплощена в вычислительной системе, которая содержит инструкции, сохраненные на считываемом устройством носителе информации, и процессор, который выполняет эти инструкции. Однако должно быть понятно, что возможно множество разных путей воплощения примерных вариантов осуществления в компьютерных программах, и примерные варианты осуществления не следует рассматривать как ограниченные только одним набором компьютерных программных инструкций. Кроме того, для квалифицированного программиста будет возможным написать такую вычислительную программу для воплощения варианта осуществления на основе приложенных блок-схем последовательности операций и соответствующего описания в тексте заявки. Поэтому, раскрытие определенного набора инструкций программного кода не считается необходимым для адекватного понимания того, как использовать на практике примерные варианты осуществления. Функции примерных вариантов осуществления поясняются более подробно в следующем описании, которое должно быть прочитано вместе с чертежами, иллюстрирующими поток программной обработки.
На фиг.1 и 5 показана выдвижная автономная установка 20 для технического обслуживания скважины. В то время как примерные варианты осуществления и способы в данном раскрытии будут описаны со ссылкой на установку 20, способы и операции, описанные здесь, не должны быть ограничены этим, и они также могут быть внедрены и могут использоваться в стационарном оборудовании для обслуживания и ремонта скважины, а также для буровых установок. Примерная установка 20 для технического обслуживания скважины включает в себя раму 22 грузовика, установленную на колеса 24, двигатель 26, гидравлический насос 28, компрессор 30 воздуха, первую трансмиссию 32, вторую трансмиссию 34, лебедку с переменной скоростью с барабаном 36, трос 37 крюка, блок 38, соединенный с тросом 37 крюка, выдвижную стрелу 40, первый гидравлический цилиндр 42, второй гидравлический цилиндр 44, первый датчик 46, вычислительную систему 48, выдвижные опоры 50 и взвешивающие площадки 92.
Двигатель 26 избирательно соединяется с колесами 24 и лебедкой, и барабаном 36, с помощью трансмиссии 34 и 32, соответственно. Двигатель 26 также приводит в движение гидравлический насос 28 через линию 29 и компрессор 30 для воздуха через линию 31. Компрессор 30 обеспечивает энергию для пневматической скользящей плашки (не показана), и насос обеспечивает питание для набора гидравлических захватов (не показаны) и взвешивающих площадок 92. Насос 28 также обеспечивает питание для цилиндров 42 и 44, которые, соответственно, выдвигаются и поворачивают стрелу 40 для избирательного перемещения стрелы 40 в рабочее положение, как показано на фиг.1, и в опущенное положение, как показано на фиг.2. В рабочем положении стрела 40 установлена вверх, и, в определенных примерных рабочих положениях, ее продольная центральная линия 54 смещена на некоторый угол от вертикали, как обозначено углом 56. Угловое смещение обеспечивает возможность доступа для блока 38 к скважине 58 так, что он не мешает точке 60 поворота стрелы. С помощью углового смещения 56, рама стрелы не мешает обычно выполняемым быстро вставке и изъятию многочисленных сегментов колонны труб.
Отдельные сегменты колонны труб (колонна 62 насосных труб) свинчивают друг с другом, используя гидравлические захваты. Термин "гидравлические захваты", используемый здесь и ниже, относится к любому гидравлическому инструменту, который позволяет свинчивать вместе два отрезка одного любого или больше типов труб. Во время выполнения этой операции насос 28 приводит в движение гидравлический двигатель (не показан), который поворачивает элемент ключа относительно зажима на захватах. Этот элемент и зажим зажимают плоские участки на сопряженных соединениях колонны 62 насосных труб в одном примерном варианте осуществления.
Хотя это и показано ясно на чертежах, при установке сегментов 62 труб используется пневматическая скользящая плашка для удержания колонны 62 труб, в то время как следующий сегмент колонны 62 труб привинчивают, используя захваты. Компрессор 30 обеспечивает воздух под давлением через клапан для быстрого зажима и высвобождения плашки. Резервуар помогает поддерживать постоянное давление воздуха. Переключатель давления передает в вычислительную систему 48 (фиг.3) сигнал, который опосредованно обозначает рабочее состояние установки 20.
Снова возвращаясь к фиг.1, можно видеть, что вес, приложенный к блоку 38, определяют с помощью гидравлической площадки 92, которая поддерживает вес установки 20. Гидравлическая площадка 92, в принципе, представляет собой поршень в цилиндре (или, в качестве альтернативы, диафрагму). Гидравлическое давление на площадке 92 повышается при увеличении веса блока 38 или установки 20. На фиг.3, первый датчик 46 преобразует гидравлическое давление в сигнал 94 0-5 В постоянного тока, который передают в вычислительную систему 48. В качестве альтернативы, первый датчик 46 может преобразовывать гидравлическое давление в сигнал 4-20 миллиампер. Вычислительная система 48 преобразует сигнал 94 в цифровое значение (такое, как значение веса), сохраняет его в запоминающем устройстве 96 и ассоциируют его с меткой реального времени. В определенных примерных вариантах осуществления вычислительная система 48 также передает данные в удаленный компьютер 100 или в интерфейс 700 пользователя по фиг.7, с использованием аппаратных средств, модема 98, линии T1, WiFi, глобальной вычислительной сети (WAN), локальной вычислительной сети (LAN), беспроводной локальной вычислительной сети (WLAN), общегородской вычислительной сети (MAN), спутника, радиочастоты (RF), микроволн, Интернет или другого устройства или способа для передачи данных, известного для специалистов в данной области техники.
В варианте осуществления, показанном на фиг.4, используются две площадки 92, связанные с двумя датчиками 46 и 102, В то время как примерный вариант осуществления на фиг.4 описывает использование двух гидравлических площадок 92, можно использовать одну или больше, чем две гидравлические площадки, и они находятся в пределах объема и сущности данного раскрытия. Интегратор 104 гидравлически разделяет площадки 92. Каждая сторона штока поршней 106 и 108 имеет область, подвергаемую давлению, которая составляет половину общей внешней площади поверхности поршня 108. Таким образом, камера 110 вырабатывает давление, которое представляет собой среднее значение давления на площадках 92. В одном примерном варианте осуществления используется только один датчик 46, и он соединен с портом 112. В другом примерном варианте осуществления используются два датчика 46 и 102 так, что датчик 102 с правой стороны установки 20 соединен с портом 114, и датчик 46 с левой стороны соединен с портом 116. Хотя выше было описано использование гидравлической площадки 92, для определения веса установки, измеренного веса и данных нагрузки на крюк, для специалистов в данной области техники будет понятно, что другие типы датчиков нагрузки можно использовать, включая в себя, но без ограничений, тензометрические датчики, индикаторы на тросе и т.п.
Возвращаясь к фиг.3, датчики 46 и 102 показаны соединенными с вычислительной системой 48. Датчик 46 обозначает давление на левой площадке 92, и датчик 102 обозначает давление на правой площадке 92. Генератор 118, приводимый в движение от двигателя 26, предоставляет выходное напряжение, пропорциональное скорости двигателя. Это выходное напряжение прикладывают к двухрезисторному делителю напряжения для получения сигнала 0-5 В постоянного тока в точке 120 и затем пропускают через усилитель 122. Генератор 118 представляет собой всего лишь один из множества различных тахометров, которые обеспечивают сигнал обратной связи, пропорциональный скорости двигателя. В другом примере тахометра двигатель 26 приводит в движение генератор переменного тока и измеряет его частоту. Датчик 80 обеспечивает сигнал, пропорциональный давлению гидравлического насоса 28, и, таким образом, пропорциональный крутящему моменту захватов.
Схема 124 включает в себя четыре входных канала 126, 128, 130 и 132, запоминающее устройство 96 и часы 134. Схема 124 периодически осуществляет выборку входных сигналов 126, 128, 130 и 132 с выбираемой пользователем или заданной и заранее запрограммированной частотой выборки; преобразует эти показатели в цифровую форму; преобразует оцифрованные значения на основе коэффициентов преобразования (если необходимо), и сохраняет преобразованные в цифровую форму значения и/или преобразованные значения в запоминающем устройстве 96. Для специалиста в данной области техники будет понятно, что при использовании соответствующих схем может быть выполнено преобразование в цифровую форму любого количества входных сигналов, и эти данные могут быть переданы, преобразованы и проанализированы сразу же после приема.
В определенных примерных вариантах осуществления компьютер 100, удаленный от рабочего места, в котором работает установка 20 для технического обслуживания, может осуществлять доступ к данным, сохраненным в схеме 124, с помощью устройства 136 передачи данных, которое может включать в себя, но не ограничено этим, модем 98 на основе ПК, устройство беспроводной передачи данных, сигнал на основе спутника, сотовый телефон, передачу по проводам или другие известные способы передачи данных. Устройство 136 передачи данных считывает данные, сохраненные в схеме 124, через линии 138, и передает эти данные, например, через антенны 140 и 142. В альтернативном варианте осуществления данные передают с помощью кабельного модема, системы WiFi, микроволн, RF, спутника или другого известного средства передачи.
Усилители 122, 144, 146 и 148 выполняют выходную обработку своих соответствующих входных сигналов для получения соответствующих входных сигналов 126, 128, 130 и 132, имеющих соответствующую мощность и диапазон амплитуд. Существенная мощность необходима для цепей 150 RC, которые кратковременно (например, в течение 2-10 секунд) поддерживают амплитуду входных сигналов 126, 128, 130 и 132 даже после того, как выходные сигналы датчиков 46, 102 и 80 и выходные сигналы генератора 118 отключатся. Это обеспечивает возможность захвата коротких выбросов, без наличия выборки и без сохранения чрезмерного количества данных. Источник 152 постоянного тока обеспечивает чистое и точное напряжение возбуждения для датчиков 46, 102 и 80; и также подает в схему 124 соответствующее напряжение с помощью делителя 154 напряжения. Переключатель 90 давления включает источник 152 питания через реле 156, контакты 158 которого замыкаются с помощью катушки 160, питание в которую подают от батареи 162.
На фиг.6 представлена иллюстрация методики захвата действия в табличной форме, в соответствии с одним примерным вариантом осуществления настоящего изобретения. Теперь рассмотрим фигуру 6, оператор вначале выбирает идентификатор действия для своей следующей задачи. Если будет выбран "ГЛОБАЛЬНЫЙ", тогда оператор может выбирать варианты подъема/опускания стрелы, извлечения/опускания колонны труб или штанг, или укладки/подъема труб и штанг (опции, не показанные на фиг.6). Если будет выбрано "ПРОЦЕДУРА: ВНУТРЕННЯЯ", тогда оператор выбирает между подъемом или опусканием вспомогательного модуля обслуживания, большой длиной хода, отсечкой парафина, подъемом вверх/вниз путем накачки воздуха ВОР, ловильными работами в скважине, вибрацией, откачкой поршнем, обратного потока, бурения, очистки, действия по управлению скважиной, такие как задавливание скважины буровым раствором или циркуляция жидкости, подъем с места посадки насосов, установка/высвобождение якоря колонны труб, установка/высвобождение пакета и подъем труб укладки воротника бура и/или других инструментов. В конечном итоге, если будет выбрано "ПРОЦЕДУРА: ВНЕШНЯЯ", оператор тогда выбирает действие, которое выполняется третьей стороной, такое как подъем/опускание обслуживающего оборудования третьей стороны, стимуляция скважины, цементирование, каротажные работы, перфорирование или инспекция скважины и другие общеизвестные задачи технического обслуживания, выполняемые третьей стороной. После идентификации действия, его классифицируют. Для всех вариантов классификации, кроме "ВЫПОЛНЯЕТСЯ: ПРОЦЕДУРА", выбирают идентификатор вариации и затем классифицируют, используя значения классификации вариации. Выбор для каждого из действий, представленных выше, может быть выполнен оператором установки, например, с использованием интерфейса 700 пользователя, предусмотренного на фиг.7. Этот выбор может быть затем передан в вычислительную систему 48 для сохранения в памяти или для использования при определении других значений, стандартов и пределов, для управления работой установки 20.
На фиг.7 предоставлен вид интерфейса 700 пользователя для оператора установки в соответствии с одним примерным вариантом осуществления. Теперь, как показано на фиг.7, интерфейс 700 пользователя включает в себя раму 705 и экран 710. В одном примерном варианте осуществления экран представляет собой сенсорный экран, который позволяет оператору вводить информацию, относящуюся к установке 20, для использования в вычислительной системе 48. Например, как показано на фиг.7, экран 710 может предоставлять список действий 715, которые могут быть выполнены установкой 20, и оператор может выбрать одно из действий 715, либо прикасаясь к обозначению действия на экране, или используя более стандартные входные устройства, такие как мышь и/или клавиатуру 725, для выбора действия. Например, если для оператора представляют отображение, показанное на фиг.7, после приезда на буровую площадку, тогда оператор вначале может нажать на кнопку "ПОДЪЕМ". Оператору затем представляют варианты выбора для выбора, например, "ОБСЛУЖИВАЮЩИЙ МОДУЛЬ", "ВСПОМОГАТЕЛЬНЫЙ ОБСЛУЖИВАЮЩИЙ МОДУЛЬ" или "ТРЕТЬЯ СТОРОНА". Оператор затем мог бы выбрать, выполнить такое действие, или имеется исключение, как описано выше. Кроме того, как показано на фиг.7, перед вытягиванием (извлечением) или опусканием (вставкой) колонны труб, оператор может установить верхний и нижний пределы для блока 38 путем нажатия кнопок ввода высокого или ввода низкого значений после перемещения блока 38 в соответствующее положение. Оператор также может вводить исходные стандарты или пределы для использования автоматизированной системы ограничения нагрузки на крюк.
Процессы примерных вариантов осуществления настоящего изобретения будут описаны ниже со ссылкой на фиг.8-13. Определенные этапы в процессах, описанных ниже, естественно, должны предшествовать другим в примерных вариантах осуществления для функционирования, как описано. Однако этот процесс не ограничен порядком описанных этапов, если такой порядок или последовательность не изменяют функциональность или общий результат процессов нежелательным способом. То есть, считается, что некоторые этапы могут быть выполнены перед или после других этапов или параллельно с другими этапами, без выхода за пределы объема и сущности настоящего изобретения.
Возвращаясь теперь к фиг.8, где в соответствии с одним примерным вариантом осуществления настоящего изобретения представлены блок-схемы логической последовательности операций, иллюстрирующие примерный способ 800 для автоматической установки и повторной установки нагрузка на крюк и других пределов и управления операциями установки в отношении нагрузки на крюк и других весовых пределов установки. Рассмотрим теперь фиг.1, 3-7 и 8, примерный способ 800 начинается на этапе НАЧАЛО и продолжается до этапа 805, где определены действия, выполняемые в установке 20. В одном примерном варианте осуществления действие определяет оператор установки, выбирающий действие через интерфейс 700 установки. В качестве альтернативы, действие может быть определено автоматически с помощью вычислительной системы 48 путем оценки определенных действий и параметров установки 20 для технического обслуживания скважины. Примерные способы для автоматического определения операции на установке предусмотрены в патенте США №7,519,475, под названием Method for Determining Block Properties of a Service Rig by Evaluating Rig Data; патенте США №7,359,801, titled Method and System for Evaluating Weight Data from a Service Rig; и заявке на патент США №11/518,701 под названием Method and System for Evaluating Task Completion Times to Data Method and System for Evaluating Task Completion Times to Data, полное содержание каждого из которых приведено здесь по ссылке.
На этапе 810 выполняют запрос для определения, является ли действие, выполняемое в установке 20, действием, для которого требуется использовать автоматизированную систему ограничения нагрузки на крюк. В одном примерном варианте осуществления выполняют определение с помощью вычислительной системы 48. В данном примерном варианте осуществления оператор установки выбирает действие через интерфейс 700 пользователя. Запрос на действие передают в вычислительную систему 48. Вычислительная система 48 сравнивает действие, выполняемое или которое должно быть выполнено, со списком действий, для которых должна использоваться автоматизированная система ограничения нагрузки на крюк, (AHLL). Если действие представляет собой действие, для которого должна использоваться система AHLL, вычислительная система 48 определяет, отличается ли выбранное действие от действия, которое выполняется в данный момент времени или выполнялось последним. Например, если установка 20 ранее выполняла действие РОН и затем только находилась в режиме ожидания, после чего вводили еще одно действие РОН, это типично не рассматривается, как новое действие. Если действие является новым, тогда вычислительная система 48 передает запрос в интерфейс 700 пользователя для отображения для оператора запроса исходных входных параметров AHLL, которые предоставляет оператор установки.
В качестве альтернативы, вычислительная система 48 может предоставлять подсказку и/или принимать входную команду от оператора через интерфейс 700 пользователя, следует ли инициализировать систему AHLL. В некоторых примерных вариантах осуществления действия, выполняемые на установке 20, в которой используют систему AHLL, включают в себя, но без ограничений, работу в скважине, извлечение из скважины, действия на линии откачки песка, или любое другое действие, которое могло бы иметь предсказуемые переменные нагрузки на крюк (то есть, следующая нагрузка на крюк может изменяться только в ограниченной степени в соответствующим образом функционирующей системе). Если будет выполнено определение, что система AHLL не должна использоваться для текущего действия, обработка следует по ответвлению НЕТ обратно на этап 805 для продолжения выполнения мониторинга действия. В противном случае, обработка следует по ответвлению ДА на этап 815, где принимаются исходные параметры для операции AHLL. В одном примерном варианте осуществления исходные параметры вводит оператор установки через интерфейс 700 пользователя. В качестве альтернативы, исходные параметры сохраняют в и выводят из запоминающего устройства 96 вычислительной системы 48. В еще одном другом альтернативном варианте осуществления некоторые параметры сохраняют в и принимают из вычислительной системы 48, в то время как другие параметры вводит оператор установки через интерфейс 700 пользователя.
Цикл обучения выполняют на этапе 820. В одном примерном варианте осуществления цикл обучения, в общем, может быть описан, как первые несколько движений при выполнении действия, таких как вытягивание первых нескольких труб 62 из скважины 58, и заканчивается тем, что убеждаются, что данные были получены правильно, например, в вычислительной системе 48, и что исходные пределы, по существу, являются такими, как ожидалось. В одном примерном варианте осуществления, одно движение или цикл при выполнении действий включает в себя движение блока 38 из ненагруженного положения, через действия оператора, такие как вытягивание бурильных труб из скважины или погружение бурильных труб в скважину, и обратно в незагруженное положение. В одном примере для РОН, одно движение или цикл включает в себя начало из положения блока, готового для соединения с колонной 62 труб; соединение блока 38 с колонной 62; подъем колонны со скользящих плашек; подъем колонны 62 труб до уровня, на котором труба может быть удалена; размещение колонны 62 труб обратно на скользящие плашки; удаление участка трубы и укладка его; и возврат блока 38 обратно в положение, готовое для повторного соединения с колонной 62 труб. В другом примере, для RIH, движение или цикл включает в себя, начинают из положения блока, готового к соединению с новым участком колонны труб для добавления к колонне 62 труб; захватывают новый отрезок трубы и соединяют его с колонной 62 труб; поднимают колонну 62 труб со скользящих плашек; погружают колонну труб в скважину 58 (что может включать в себя действие бурения скважины); устанавливают колонну 62 труб обратно на скользящие плашки; и перемещают блок 38 обратно в положение, готовое для присоединения нового отрезка трубы.
На этапе 825 подают запрос для определения, закончен ли цикл обучения. В одном примерном варианте осуществления такое определение выполняют с помощью вычислительной системы 48 на основе различных факторов. В качестве альтернативы, оператор установки может выполнить определение и ввод результата этого определения через интерфейс 700 пользователя. Если определенный цикл обучения еще не закончен, обработка снова следует по ответвлению НЕТ до этапа 820, где цикл обучения продолжается. Если цикл обучения закончен, обработка следует по ответвлению ДА на этапе 830. На этапе 830 вычислительная система 48 инициирует и выполняет рабочий цикл для определенного действия. В одном примерном варианте осуществления, если достигаются определенные пределы, обработка продолжается до этапа 835, где предельный цикл выполняется для определенного действия. Обработка затем продолжает до этапа конец.
На фиг.9 представлена логическая блок-схема последовательности операций, иллюстрирующая примерный способ 815 для приема исходных параметров для операции AHLL в соответствии с примерным вариантом осуществления по фиг.8. Как показано на фиг.1, 3-8 и 9, примерный способ 815 начинается путем приема исходного предельного значения нагрузки на крюк на этапе 905. В одном примерном варианте осуществления исходный предел нагрузки на крюк вводит оператор установки через интерфейс 700. Исходный предел нагрузки на крюк затем сохраняют в памяти 96 вычислительной системы 48. В качестве альтернативы, исходный предел нагрузки на крюк сохраняют и извлекают из запоминающего устройства 96 вычислительной системы 48. В еще одном альтернативном варианте осуществления исходный предел нагрузки на крюк представляет собой текущий предел нагрузки на крюк по результатам действия, которое было выполнено раньше.
На этапе 906 подают запрос для определения, находится ли исходный предел нагрузки на крюк в пределах допустимого диапазона. В одном примерном варианте осуществления вычислительная система 48 определяет, путем сравнения исходного предела нагрузки на крюк с допустимым диапазоном, который составлен из предела нагрузки на крюк стрелы крана на высокой стороне и минимального предела нагрузки на крюк на низкой стороне. Если исходный предел нагрузки на крюк не находится в пределах допустимого диапазона, следуют по ответвлению НЕТ до этапа 907, где вычислительная система инициирует сигнал для запроса другого исходного предельного значения нагрузки на крюк. В одном примерном варианте осуществления запрос представляют для оператора через интерфейс 700 пользователя. Обработка возвращается на этап 905 для приема другого исходного предельного значения нагрузки на крюк. Возвращаясь на этап 906, если исходное предельное значение нагрузки на крюк находится в пределах допустимого диапазона, дальше обработка следует по ответвлению ДА до этапа 910.
На этапе 910 принимают вес установки. В одном примерном варианте осуществления вес установки определяют на основе давления (гидравлического или другого) на площадке 92. Эти показатели давления преобразуют в значение веса, используя коэффициент преобразования, который предоставляется изготовителем гидравлической площадки. В одном примерном варианте осуществления показатели давления считывают с помощью вычислительной системы 48, которая преобразует результаты этого считывания в весовые значения. В качестве альтернативы, оператор установки может ввести вес установки в вычислительную систему 48 через интерфейс 700 пользователя. В другом альтернативном варианте осуществления вес установки представляет собой заданное значение, которое сохраняют и выводят из запоминающего устройства 96 вычислительной системы 48. В этом примерном варианте осуществления предельное значение нагрузки на крюк стрелы крана (максимальное предельное значение нагрузки на стрелу крана) устанавливают как исходное предельное значение нагрузки на крюк. В еще одном другом альтернативном варианте осуществления, вместе с или вместо определения веса установки, оператор может сбросить в ноль или может откалибровать систему измерения веса для удаления веса установки, нажимая на кнопку нулевой вес в интерфейсе 700 пользователя.
На этапе 915 подают запрос для определения, требуются ли измеренные весовые коэффициенты. В одном примерном варианте осуществления такое определение выполняют с помощью вычислительной системы 48. В альтернативном варианте осуществления определение выполняют с помощью оператора установки через интерфейс 700 пользователя. Если измеренный весовой коэффициент не требуется, обработка следует по ответвлению НЕТ до этапа 820 на фиг.8. В противном случае, обработка следует по ответвлению ДА до этапа 920, где принимают входные данные измеренного весового коэффициента для блока с установленным тросом. В одном примерном варианте осуществления принимают входную команду через интерфейс 700 пользователя от оператора установки. В качестве альтернативы, измеренный весовой коэффициент для блока с установленным тросом, сохраняют и получают из запоминающего устройства 96 вычислительной системы 48.
Весовой коэффициент, измеренный по оттяжке, принимают на этапе 925. В одном примерном варианте осуществления весовой коэффициент, измеренный по оттяжке, вводят через интерфейс 700 пользователя. В альтернативном варианте осуществления весовой коэффициент, измеренный по оттяжке, сохраняют в запоминающем устройстве 96 вычислительной системы 48 и извлекают из него. На этапе 930, принимают весовой коэффициент масштабирования датчика. Измеренный весовой коэффициент масштабирования датчика аналогичен тому, что описано выше в отношении преобразования показаний давления в площадках 92 значений веса. В зависимости от того, какие датчики используются и какой вес измеряют, вероятно, используют различные измеряемые весовые коэффициенты. В одном примерном варианте осуществления измеренный весовой коэффициент для масштабирования датчика вводят с помощью оператора установки через интерфейс 700 пользователя. В качестве альтернативы, измеренный весовой коэффициент (коэффициенты) для масштабирования датчика сохраняют в запоминающем устройстве 96 вычислительной системы 48 и извлекают из него.
Измеренный весовой коэффициент (MWF) определяют на этапе 935. В одном примерном варианте осуществления MWF определяют с помощью вычислительной системы 48. В этом примерном варианте осуществления MWF определяют путем расчета произведения измеренного весового коэффициента для блока с установленным тросом, весового коэффициента, измеренный по оттяжке, и весового коэффициента, измеренного для масштабирования датчика. На этапе 940 рассчитывают исходный измеренный весовой предел (MWL). В одном примерном варианте осуществления MWL определяют с помощью вычислительной системы 48, и он может представлять собой сумму веса установки и исходного предела нагрузки на крюк. Обработка затем продолжается до этапа 820 на фиг.8.
На фиг.10 представлена логическая блок-схема последовательности операций, иллюстрирующая примерный способ 820 для завершения цикла определения, для операции автоматизированного предела нагрузки на крюк в соответствии с примерным вариантом осуществления на фиг.8. Теперь, рассматривая фиг.1, 3-8 и 10, можно видеть, что примерный способ 820 начинается на этапе 1002, где принимают нижний рабочий предел блока 38. В одном примерном варианте осуществления оператор может обеспечивать нижний рабочий предел для блока 38, опуская блок 38 до желательного нижнего предела и, после того, как блок будет находиться в этом месте, он вводит это положение через интерфейс 700 пользователя. В определенных примерных вариантах осуществления положение блока 38 отслеживают, используя кодер в барабане 36 или в другом месте вдоль троса 37. В альтернативном варианте осуществления нижний рабочий предел для блока 38 определяют с помощью вычислительной системы 48, которая оценивает выход кодера для конкретного действия и выполняет определение нижнего предела на основе этих выходных значений.
Верхний рабочий предел для блока 38 система 48 принимает на этапе 1005. В одном примерном варианте осуществления оператор может предоставить верхний рабочий предел для блока 38 аналогично тому, что описано выше на этапе 1002, за исключением того, что блок вначале перемещают к требуемому верхнему пределу. Кроме того, в качестве альтернативы, верхний рабочий предел для блока 38 может быть определен с помощью вычислительной системы 48, которая выполняет определение на основе данных кодера, полученных во время выполнения действия, с сохранением значения в запоминающем устройстве 96. На этапе 1008, система 48 определяет участок блока, которым управляют между двумя пределами, на котором система может собирать определенные данные для расчетов. Например, если нагрузка на крюк определяется независимо от измеренного веса и веса установки, нагрузку на крюк определяют во время действия, когда блок 38 поднимает колонну 62 труб, и вес установки определяют во время участка движения или цикла, когда блок 38 не соединен с колонной 62 труб или отрезком труб. Например, после выполнения действия RIH, определяют нагрузку на крюк, когда блок 38 снимает колонну 62 труб со скользящих плашек. Для действия РОН нагрузку на крюк определяют на участке диапазона, и блок поднимает колонну 62 труб, и перед тем, как отрезок труб будет снят с колонны труб. Например, нижняя четверть и верхняя четверть подъема колонны труб может быть проигнорирована, и данные нагрузки на крюк могут быть получены из средних пятидесяти процентов подъема колонны 62 труб. Специалистам в данной области техники будет понятно, что все или другие участки подъема можно использовать для сбора данных нагрузки на крюк, без выхода за пределы объема и сущности этого изобретения.
На этапе 1009 выполняют запрос для определения, существует ли требование завершения одного или больше движений принятого действия в цикле обучения. В определенных вариантах осуществления система может быть выполнена так, что не требуется, чтобы оператор закончил любые движения при выполнении действий на цикле обучения. В одном из примерных вариантов осуществления программу, определяющую следует или нет выполнить движения в цикле обучения, сохраняют в запоминающем устройстве 96 вычислительной системы 48. Если требование выполнения движений в цикле обучения отсутствует, обработка следует по ответвлению НЕТ на этап 1010, на котором принимают значение, введенное оператором. Обработка затем продолжается до этапа 1059. В качестве альтернативы, если движения должны быть выполнены на этапе обучения, то обработка следует по ответвлению ДА до этапа 1011.
Одно движение определенного действия выполняют на этапе 1011. Например, одиночное движение для подъема из скважины может представлять собой опускание блока 38 вниз и закрепление его на колонне 62 труб, подъем колонны 62 труб из скважины 58, отсоединение снятого отрезка колонны 62 труб от остальной колонны труб в скважине, и укладка на хранение отрезков колонны труб, например, на стойке или с опорой на установку 20. Фактические данные веса установки принимают в системе 48 во время заданного периода выполнения действия на основе определенного действия на этапе 1014. На этапе 1017 фактически измеренные данные веса принимают в системе 48 во время другого заданного участка движения на основе действия. В некоторых примерных вариантах осуществления период, в который данные принимают для веса установки и измеренного веса, являются теми же или другими, и могут накладываться друг на друга или не накладываться друг на друга. В одном примерном варианте осуществления, как фактический вес установки, так и фактически измеренные данные веса, принимают по считанным значениям давления на площадках 92 и сохраняют и анализируют с помощью вычислительной системы 48.
На этапе 1020 подают запрос для определения, превышает ли фактический измеренный вес в любой момент во время выполнения движения предел измеренного веса. Типично это происходит при выполнении движения, таким образом, что если возникает проблема, действие будет остановлено автоматически вычислительной системой 48, и практически мгновенно после детектирования. В одном примерном варианте осуществления такой предел измеренного веса представляет собой исходный предел измеренного веса, введенный в результате расчета, выполненного системой 48 на фиг.9. Если фактически измеренный вес больше, чем предел измеренного веса, обработка следует по ответвлению ДА до этапа 1023, где сигнал передают в систему 48 для инициирования сигнала тревоги. Сигнал тревоги может быть звуковым, визуальным или комбинацией обоих. Например, сигнал тревоги может представлять собой сирену, световой сигнал и/или сообщение, которое отображается в интерфейсе 700 пользователя. На этапе 1026, система 48 передает сигнал для включения тормоза, отсоединения сцепления барабана между двигателем 26 и барабаном 36 и перевода двигателя 26 в режим холостого ходя для установки 20.
На этапе 1027 передают запрос для определения, является ли измеренный вес все еще больше, чем MWL. В одном примерном варианте осуществления измерения измеренного веса могут быть выполнены после остановки операций, выполняемых установкой на этапе 1026, и этот вес может быть проанализирован вычислительной системой 48 для определения, являются ли новые измеренные данные веса все еще большими, чем MWL. Если измеренный вес еще больше, чем MWL, обработка следует по ответвлению ДА, до этапа КОНЕЦ. В противном случае, обработка следует по ответвлению НЕТ до этапа 1011. В некоторых примерных вариантах осуществления оператор может услышать сигнал тревоги, исправить проблему и/или передать инструкцию в установку продолжать выполнение движения. В данном варианте осуществления данные веса, снимаемые во время движения, при котором возникает состояние тревоги, не будут использоваться для определения предела нагрузка на крюк, MWL или предложенного допустимого дополнительного веса на крюке.
Возвращаясь к этапу 1020, если измеренный вес не больше, чем предел измеренного веса, обработка следует по ответвлению НЕТ на этапе 1029. На этапе 1029 новый средний вес установки определяют на основе принятых фактических данных веса установки. В одном примерном варианте осуществления выполняют определение с помощью вычислительной системы 48. В данном варианте осуществления вычислительная система 48 принимает множество точек данных веса установки, суммирует эти значения веса, представленные этими точками данных, и делит эту сумму на количество точек данных. В одном примерном варианте осуществления значения данных снимают каждые десять миллисекунд во время определенного участка рабочего движения; однако, можно использовать большие или меньшие периоды времени для съема значений данных. В альтернативном варианте осуществления одна из фактически измеренных точек данных веса установки используется вместо среднего значения фактических точек данных веса установки. На этапе 1032, новое среднее измеренное значение веса определяют на основе принятых фактических измеренных данных веса. В одном примерном варианте осуществления выполняют определение с помощью вычислительной системы 48. В данном варианте осуществления вычислительная система 48 принимает множество измеренных точек данных веса, суммирует измеренные значения веса, представленные этими точками данных, и делит эту сумму на количество точек данных. В одном примерном варианте осуществления значения данных снимают каждые десять миллисекунд в течение установленного периода выполнения движения; однако, можно использовать большие или меньшие периоды времени для съема значений данных. В альтернативном варианте осуществления одну из фактически измеренных точек данных веса используют вместо среднего значения фактически измеренных точек данных веса.
Новую среднюю нагрузку на крюк определяют на этапе 1035. В одном примерном варианте осуществления выполняют определение с помощью вычислительной системы 48. В одном примерном варианте осуществления новую среднюю нагрузку на крюк определяют путем расчета разности между новым средним измеренным весом и новым средним весом установки. В качестве альтернативы, новое среднее значение нагрузки на крюк определяют путем приема данных нагрузки на крюк во время движения, используя либо измерительное устройство на тросе 37, такое как шкала на тросе, или на основе установки оператором установки нулевого веса для установки в интерфейсе 700 перед началом действия или определенным движением, и рассчитывают новое среднее значение нагрузки на крюк аналогично тому, что описано на этапах 1029 и 1032. В альтернативном варианте осуществления одну из фактических точек данных нагрузки на крюк используют вместо среднего значения точек данных нагрузки на крюк.
На этапе 1038 выполняют запрос для определения, требуется ли новый измеренный весовой коэффициент. В одном примерном варианте осуществления это определение выполняют с помощью вычислительной системы 48. Если MWF требуется, обработка следует по ответвлению ДА до этапа 1041, где система 48 рассчитывает произведение нового среднего значения нагрузки на крюк и MWF, как новое среднее значение нагрузки на крюк. Обработка затем продолжается до этапа 1044. Если MWF не требуется, тогда обработка следует по ответвлению НЕТ до этапа 1044. На этапе 1044 определяют новое предложенное значение допустимого дополнительного веса на крюке. В одном примерном варианте осуществления новое предложенное значение допустимого дополнительного веса на крюке определяют с помощью вычислительной системы 48. Кроме того, в одном примерном варианте осуществления, новое предложенное значение допустимого дополнительного веса на крюке рассчитывают, как разность между текущим предельным значением нагрузки на крючке и новым средним значением нагрузки на крюк. В другом примерном варианте осуществления предложенный допустимый дополнительный вес на крюке может представлять собой среднее значение предложенных допустимых дополнительных значений веса на крюке, полученных в течение движений цикла обучения. Например, если три движения будут выполнены в течение цикла обучения, тогда предложенное значение допустимого дополнительного веса на крюке для каждого движения суммируют вместе, и эту сумму делят на три для получения предложенного допустимого значения дополнительного веса на крюке. В данном примерном варианте осуществления анализ и определение выполняют с помощью вычислительной системы 48.
На этапе 1047 выполняют запрос для определения, находится ли новое предложенное значение допустимого дополнительного веса на крюке в пределах запаса безопасности. В одном примерном варианте осуществления значения запаса безопасности представляют собой диапазон веса. Значения запаса безопасности могут быть введены оператором через интерфейс 700 пользователя, например, во время приема параметров фазы на этапе 815, и сохранены в запоминающем устройстве 96 системы 48. В качестве альтернативы, значения запаса безопасности могут быть предварительно сохранены в запоминающем устройстве 96 вычислительной системы 48. Значения запаса безопасности могут быть одинаковыми или разными для каждого конкретного действия. Если новое предложенное значение допустимого дополнительного веса на крюке не будет находиться в пределах запаса безопасности, обработка следует по ответвлению НЕТ до этапа 1050, где система 48 устанавливает новое значение допустимого дополнительного веса на крюке, как равное ближайшему значению запаса безопасности. Например, если новое предложенное значение допустимого дополнительного веса на крюке составляло 18000 фунтов, и запас безопасности составлял диапазон 5000-15000 фунтов, тогда новое предложенное значение допустимого дополнительного веса на крюке будет находиться за пределами запаса безопасности, и новое значение допустимого дополнительного веса на крюке будет отрегулировано до 15000 фунтов. В другом примере, если новое предложенное значение допустимого дополнительного веса на крюке составляет 3000 фунтов, и запас безопасности представляет собой тот же диапазон, что и выше, тогда новое значение допустимого дополнительного веса на крюке будет отрегулировано до 5000 фунтов. Возвращаясь на этап 1047, если новое предложенное значение допустимого дополнительного веса на крюке находится в пределах запаса безопасности, тогда обработка следует по ответвлению ДА до этапа 1053, где новое предложенное значение допустимого дополнительного веса на крюке будет принято, как новое предложенное значение дополнительного веса на крюке.
На этапе 1056, рассчитывают новый предел нагрузки на крюк. В одном примерном варианте осуществления вычислительная система 48 рассчитывает новый предел нагрузки на крюк. Кроме того, в одном примерном варианте осуществления, новый предел нагрузки на крюк может быть рассчитан, как сумма нового среднего значения нагрузки на крюк и нового значения допустимого дополнительного веса на крюке. В альтернативном варианте осуществления, когда одну точку данных нагрузки на крюк используют вместо среднего значения точек данных нагрузки на крюк или разность между средним весом установки и средним измеренным весом, тогда новый предел нагрузки на крюк будет представлять собой сумму значения веса в точке данных нагрузки на крюк и нового значения допустимого дополнительного веса на крюке. Новый предел измеренного веса рассчитывают на этапе 1059. В одном примерном варианте осуществления новый предел измеренного веса определяют с помощью вычислительной системы 48. Кроме того, в одном примерном варианте осуществления новый измеренный предел веса рассчитывают, как сумму нового предела нагрузки на крюк и нового среднего веса установки.
На этапе 1062 выполняют запрос для определения, было ли закончено заданное количество движений в цикле обучения. В некоторых примерных вариантах осуществления количество движений, которые были закончены перед выходом цикла обучения, составляет от 1 до 1000 и, предпочтительно, составляет три движения. В одном примерном варианте осуществления вычислительная система 48 имеет регистр счетчика, который подсчитывает количество движений для действий, которые были выполнены в цикле обучения. Если заданное количество движений не было выполнено, обработка следует по ответвлению НЕТ, новый предел нагрузки на крюк устанавливают, как текущий предел нагрузки на крюк, новое значение MWL устанавливают, как текущее значение MWL, и процесс возвращается на этап 1011 для завершения другого движения. С другой стороны, если заданное количество движений не было выполнено, обработка следует по ответвлению ДА до этапа 1065.
Запрос выполняют на этапе 1065 для определения, было ли действие установки определено как успешное вычислительной системой 48, используя любые из способов, которые были описаны выше. Если действие установки не было определено как успешное, тогда обработка следует по ответвлению НЕТ, устанавливают новый предел нагрузки на крюк вместо текущего предела нагрузки на крюк, устанавливают новое значение MWL, как текущее значение MWL, и обработка возвращается на этап 1011 для завершения другого движения. В противном случае, обработка следует ответвлению ДА на этапе 1068. На этапе 1068, выполняют запрос для определения, были ли определены средние значения веса установки и средние значения нагрузки на крюк. В некоторых примерных вариантах осуществления определение на этапе 1068 выполняют с помощью вычислительной системы 48. В качестве альтернативы, определение может быть выполнено оператором и введено в интерфейс 700 пользователя и может быть передано в вычислительную систему. Если среднее значение веса установки и средняя нагрузка на крюке не были определены, то обработка следует по ответвлению НЕТ, устанавливают новый предел нагрузки на крюк, если он доступен, как текущий предел нагрузки на крюк, устанавливают новое значение MWL, если оно доступно, как текущее значение MWL, и обработка возвращается на этап 1011 для выполнения другого движения. В противном случае, обработка следует по ответвлению ДА до этапа 825 на фиг.8.
На фиг.11 представлена логическая блок-схема последовательности операций, иллюстрирующая примерный способ 1047 для определения, находится ли новый предложенный допустимый дополнительный вес на крюке в пределах запаса безопасности в соответствии с примерным вариантом осуществления по фиг.10. Обращаясь теперь к фиг.1, 3-7, 10 и 11, примерный способ 1047 начинается на этапе 1105, где принимают минимальный запас безопасности. В одном примерном варианте осуществления оператор установки вводит в вычислительную систему минимальный запас безопасности через интерфейс 700 пользователя и передает в вычислительную систему 48. Например, этот этап может быть закончен, когда оператор вводит другие параметры на этапе 815 на фиг.8. В качестве альтернативы, минимальный запас безопасности сохраняют в запоминающем устройстве 96 вычислительной системы 48 и выводят в соответствии с необходимостью. На этапе 1110, принимают максимальный запас безопасности. Что касается минимального запаса безопасности, максимальный запас безопасности может быть введен оператором через интерфейс 700 пользователя или может быть сохранен и может быть выведен из запоминающего устройства 96 вычислительной системы 48, когда требуется, в соответствии с определенными примерными вариантами осуществления. В одном примерном варианте осуществления минимальный запас безопасности составляет 5000 фунтов, и максимальный запас безопасности составляет 15000 фунтов; однако, для специалистов в данной области техники будет понятно, что минимальный и максимальный запасы безопасности в любом случае могут находиться в пределах диапазона от одного фунта до 200 000 фунтов.
На этапе 1115 новое предложенное значение допустимого дополнительного веса на крюке сравнивают с диапазоном запаса безопасности. В одном примерном варианте осуществления сравнение выполняют с помощью вычислительной системы 48. На этапе 1117 подают запрос для определения, находится ли новое предложенное значение допустимого дополнительного веса на крюке в пределах запаса безопасности. Если новое предложенное значение допустимого дополнительного веса на крюке не находится в пределах запаса безопасности, тогда обработка следует по ответвлению НЕТ на этап 1120, где определяют, что новое предложенное значение допустимого дополнительного веса на крюке больше, чем или меньше, чем диапазон запаса безопасности. Процесс затем продолжается на этапе 1050 по фиг.10. Возвращаясь на этап 1117, если новое предложенное значение допустимого дополнительного веса на крюке находится в пределах диапазона запаса безопасности, обработка следует по ответвлению ДА на этап 1125, где определяют, что оно находится в пределах запаса безопасности. Процесс продолжается на этап 1053 по фиг.10.
На фиг.12 представлена логическая блок-схема последовательности операций, иллюстрирующая примерный способ 830 для завершения рабочего цикла для действия с использованием операции AHLL в соответствии с примерным вариантом осуществления по фиг.8. Возвращаясь теперь к фиг.1, 3-8 и 12, примерный способ 830 начинается на этапе 1203, где новый предел нагрузки на крюк принимают, как текущий предел нагрузки на крюк в вычислительной системе 48. На этапе 1206 принимают новый измеренный предел веса, как текущий предел измеренного веса в вычислительной системе 48. На каждом из этапов 1203 и 1206, вычислительная система 48 может получать сохраненные значения для самого последнего движения, которые были рассчитаны, как новый предел нагрузки на крюк, и новое значение MWL и использовать их, как пределы для следующего действия, получаемого в результате движения. На этапе 1209 следующее движение или цикл действия начинается в установке 20 для технического обслуживания скважины.
Фактические данные веса установки принимают во время выполнения движения на этапе 1212, и они, по существу, аналогичны тому, что было описано со ссылкой на цикл обучения по фиг.10. В определенных примерных вариантах осуществления данные фактического веса определяют с помощью вычислительной системы 48 из показателей гидравлического давления, принятых на площадках 92, и собирают во время определенных участков движений в зависимости от выполняемого действия. На этапе 1215 принимают фактические измеренные данные веса. В определенных примерных вариантах осуществления фактические измеренные данные веса определяют с помощью вычислительной системы 48 из полученных показателей гидравлического давления на площадках 92, и эти показатели собирают во время выполнения других участков движения, в зависимости от выполняемого действия.
Фактические измеренные данные веса представляют собой данные, собираемые и подвергаемые сравнению с MWL на этапе 1218. В некоторых примерных вариантах осуществления такое сравнение выполняют с помощью вычислительной системы 48. На этапе 1221 подают запрос для определения, являются ли любые из измеренных фактических данных веса больше, чем MWL. Этот запрос может быть передан в вычислительную систему 48. Если любые из фактических измеренных данных веса больше, чем MWL, обработка следует по ответвлению ДА на этап 1224, где вычислительная система 48 передает сигналы для активации сигнала тревоги, включения тормоза барабана, разъединения сцепления барабана и переключения двигателя 26 в режим холостого хода. Как описано выше, сигнал тревоги может быть звуковым, визуальным или комбинацией обоих подходов. Например, сигнал тревоги может представлять собой сирену, свет и/или сообщение, которое отображается в интерфейсе 700 пользователя. Тот факт, что сигнал тревоги активируется, также может быть сохранен в запоминающем устройстве 96 вычислительной системы 48 для последующего анализа и обучения.
На этапе 1225 подают запрос для определения, является ли измеренный вес все еще большим, чем MWL. В одном примерном варианте осуществления измеренные значения веса могут использоваться после остановки работы установки на этапе 1224, и вес может быть проанализирован вычислительной системой 48 для определения, являются ли новые измеренные данные веса все еще большими, чем MWL. Если измеренный вес все еще больше, чем MWL, обработка следует по ответвлению ДА на этап КОНЕЦ. В противном случае, обработка следует по ответвлению НЕТ до этапа 1226, где оператор может подтвердить сигнал тревоги, скорректировать проблему и/или передать инструкции в установку для продолжения выполнения движений. В данном варианте осуществления данные веса, снимаемые во время выполняемого движения, при которых возникло состояние тревоги, не будут использоваться для определения нового предельного значения нагрузки на крюк, нового MWL или нового предложенного значения допустимого дополнительного веса на крюке. Процесс затем продолжается с этапа 1226 на этап 1209 для начала следующего движения.
Возвращаясь на этап 1221, если ни одни из фактически измеренных данных веса не превышают MWL, тогда обработка следует по ответвлению НЕТ на этап 1227, где определяют фактические данные нагрузки на крюк или принимают во время движения. В одном примерном варианте осуществления фактические данные нагрузки на крюк принимают или определяют с помощью вычислительной системы 48. Например, фактические данные нагрузки на крюк могут быть сгенерированы вычислительной системой 48, рассчитывающей разность между фактическими измеренными данными веса и данными веса установки. В качестве альтернативы, фактические данные нагрузки на крюк могут представлять собой собранные данные во время движения, используя либо измерительное устройство на тросе 37, такое как весы на тросе, или основанные на действиях оператора установки, который устанавливает нулевой вес для установки 20 через интерфейс 700 перед началом действия или определенного движения и затем использует это изменения значения, как фактические данные нагрузки на крюк, определяемые по гидравлическому давлению на площадках 92.
Фактические данные нагрузки на крюк, в том виде, как они были собраны, сравнивают с текущим пределом нагрузки на крюк на этапе 1230. В определенных примерных вариантах осуществления это сравнение выполняют с помощь вычислительной системы 48 в режиме реального или, по существу, реального времени. На этапе 1233, подают запрос для определения, являются ли фактические данные нагрузки на крюк большими, чем текущий предел нагрузки на крюк. Такой запрос может быть подан в вычислительную систему 48 в определенных примерных вариантах осуществления. Если любые из фактически полученных данных нагрузки на крюк больше, чем текущий предел нагрузки на крюк, обработка следует по ответвлению ДА на этап 1224, где вычислительная система 48 передает сигналы для активации сигнала тревоги, включения тормоза барабана, разъединения сцепления барабана и переключения двигателя 26 в режим холостого хода. С другой стороны, если ни одни из фактических данных нагрузки на крюк не больше, чем текущий предел нагрузки на крюк, обработка следует по ответвлению НЕТ на этап 1236, где новое среднее значение веса установки определяют на основе фактически полученных данных веса установки. В одном примерном варианте осуществления определение выполняют с помощью вычислительной системы 48. В этом варианте осуществления вычислительная система 48 принимает множество точек данных веса установки, суммирует эти весовые значения, представленные такими точками данных, и делит эту сумму на количество точек данных. В одном примерном варианте осуществления значения данных снимают через каждые десять миллисекунд в течение установленного участка движения; однако, можно использовать большие или меньшие периоды времени для съема значения данных.
На этапе 1239, новый средний измеренный вес определяют на основе данных фактически измеренного веса во время движения. В одном примерном варианте осуществления определение осуществляют с помощью вычислительной системы 48. В этом варианте осуществления вычислительная система 48 принимает множество точек измеренных данных веса во время движения, суммирует измеренные значения веса, представленные этими точками данных, и делит эту сумму на количество точек данных. В одном примерном варианте осуществления значения данных снимают через каждые десять миллисекунд в течение установленного участка движения; однако, можно использовать большие или меньшие периоды времени для съема значения данных.
Новое среднее значение нагрузки на крюк определяют на этапе 1242. В одном примерном варианте осуществления определение выполняют с помощью вычислительной системы 48 и определяют путем расчета разности между новым средним измеренным значением веса и новым средним весом установки. В качестве альтернативы, новое среднее значение нагрузки на крюк определяют путем приема данных нагрузки на крюк во время выполняемого движения, используя либо измерительное устройство на тросе 37, такое как весы на тросе, или на основе оператора установки, который устанавливает нулевой вес для установки через интерфейс 700 перед началом действия или перед конкретным движением и рассчитывает новое среднее значение нагрузки на крюк, аналогично описанному на этапах 1236 и 1239.
На этапе 1243 подают запрос для определения, будет ли значение допустимого дополнительного веса на крюке адаптировано после каждого движения. В определенных примерных вариантах осуществления значение допустимого дополнительного веса на крюке будет установлено в цикле обучения и затем его не модифицируют в выполняемом цикле. В других примерных вариантах осуществления значение допустимого дополнительного веса на крюке может быть повторно рассчитано после каждого движения во время выполняемого цикла, вместе с другими параметрами, которые сбрасывают после каждого движения. Если значение допустимого дополнительного веса на крюке будет адаптировано для каждого движения, тогда обработка следует по ответвлению НЕТ до этапа 1257. В противном случае, обработка следует по ответвлению ДА до этапа 1245.
На этапе 1245 определяют новое предложенное значение допустимого дополнительного веса на крюке. В одном примерном варианте осуществления новое предложенное значение допустимого дополнительного веса на крюке определяют с помощью вычислительной системы 48 и рассчитывают, как разность между текущим пределом нагрузки на крюк и новым средним значением нагрузки на крюк. На этапе 1248 подают запрос для определения, находится ли новое предложенное значение допустимого дополнительного веса на крюке в пределах запаса безопасности. Если новое предложенное значение допустимого дополнительного веса на крюке не находится в пределах запаса безопасности, обработка следует по ответвлению НЕТ до этапа 1251, где система 48 устанавливает новое значение допустимого дополнительного веса на крюке, как равное самому близкому значению запаса безопасности. Если новое предложенное значение допустимого дополнительного веса на крюке находится в пределах запаса безопасности, то обработка следует по ответвлению ДА на этап 1254, где новое предложенное значение допустимого дополнительного веса на крюке принимают, как новое значение допустимого дополнительного веса на крюке.
На этапе 1257 рассчитывают новое предельное значение нагрузки на крюк. В одном примерном варианте осуществления вычислительная система 48 рассчитывает новый предел нагрузки на крюк. Кроме того, в одном примерном варианте осуществления, новый предел нагрузки на крюк рассчитывают как сумму нового среднего значения нагрузки на крюк и нового значения допустимого дополнительного веса на крюке. На этапе 1260 подают запрос для определения, является ли разность между новым пределом нагрузки на крюк и текущим пределом нагрузки на крюк больше, чем допустимое изменение предела. В одном примерном варианте осуществления выполняют определение с помощью вычислительной системы 48. Кроме того, изменение допустимого предела может быть введено оператором через интерфейс 700 пользователя и передано в вычислительную систему для сохранения в запоминающем устройстве 96 в любой момент времени, включая в себя во время процесса ввода параметров на этапе 815 по фиг.8, или допустимое изменение предела может представлять собой заранее установленное значение, сохраненное в запоминающем устройстве 96 вычислительной системы 48, в соответствии с определенными примерными вариантами осуществления. Изменение допустимого предела также может быть одинаковым или может отличаться для каждого из действий, для которых выполняют AHLL. В одном примерном варианте осуществления изменение допустимого предела составляет одну тысячу фунтов; однако, это значение может быть сконфигурировано и модифицировано в вычислительной системе 48 таким образом, чем можно использовать больший или меньший пределы веса. Если различие будут больше, чем допустимое изменение предела, то обработка следует по ответвлению ДА на этап 1263, где новое значение предела нагрузки на крюк изменяют так, чтобы оно было равно текущему пределу нагрузки на крюк минус допустимое изменение предела или рассчитанный предел нагрузки на крюк плюс допустимое изменение предела, в зависимости от действия. Процесс продолжает до этапа 1266. Возвращаясь на этап 1260, если различие не больше, чем допустимое изменение предела, тогда обработка следует по ответвлению НЕТ до этапа 1266.
На этапе 1266, подают запрос для определения, является ли новый предел допустимой нагрузка на крюк большим, чем предел нагрузки на крюк стрелы крана. В одном примерном варианте осуществления выполняют определение с помощью вычислительной системы 48. Кроме того, предел нагрузки на крюк стрелы крана может быть введен оператором через интерфейс 700 пользователя и передан в вычислительную систему 48 для сохранения в запоминающем устройстве 96 в любое время, включая в себя во время процесса ввода параметров этапа 815 на фиг.8, или предел нагрузки на крюк стрелы крана может представлять собой заранее установленное значение, сохраненное в запоминающем устройстве 96 вычислительной системы 48 в соответствии с определенными примерными вариантами осуществления. Предел нагрузки на крюк стрелы крана типично является одинаковым, независимо от типа действий, для которых выполняется AHLL. В одном примерном варианте осуществления предел нагрузки на крюк стрелы крана определяют на основе типа установки 20 и используемой стрелы 40 крана.
Если новый предел нагрузки на крюк будет больше, чем предел нагрузки на крюк стрелы крана, тогда обработка следует по ответвлению ДА до этапа 835 по фиг.8. В противном случае, обработка следует по ответвлению НЕТ до этапа 1269. На этапе 1269 подают запрос для определения, является ли новый предел нагрузки на крюк меньшим, чем минимальный предел нагрузки на крюк. В одном примерном варианте осуществления определение осуществляют с помощью вычислительной системы 48. Кроме того, минимальный предел нагрузки на крюк может быть введен оператором через интерфейс 700 пользователя и передан в вычислительную систему 48 для сохранения в запоминающем устройстве 96 в любое время, включая в себя во время процесса ввода параметров на этапе 815 по фиг.8, или минимальный предел нагрузки на крюк может представлять собой заданное значение, сохраненное в запоминающее устройстве 96 вычислительной системы 48 в соответствии с определенными примерными вариантами осуществления. Минимальный предел нагрузки на крюк типично является одинаковым, независимо от типа действия, для которого выполняют AHLL.
Если новый предел нагрузки на крюк будет меньше, чем минимальный предел нагрузки на крюк, тогда обработка следует по ответвлению ДА, до этапа 835 на фиг.8. Если предел нагрузки на крюк не меньше, чем минимальный предел нагрузки на крюк, тогда обработка следует по ответвлению НЕТ до этапа 1272, где вычислительная система 48 рассчитывает новый измеренный предел веса. В одном примерном варианте осуществления новый измеренный предел веса рассчитывают, как сумму нового предела нагрузки на крюк и нового среднего веса установки. На этапе 1275 подают запрос для определения, следует ли выполнить дополнительное движение для окончания действия. Если требуется выполнить другие движения для окончания действия, обработка следует по ответвлению ДА на этап 1203. В противном случае, обработка не следует по какому-либо ответвлению и переходит на этап КОНЕЦ по фиг.8.
На фиг.13 представлена логическая блок-схема последовательности операций, иллюстрирующая примерный способ 835 для выполнения цикла ограничения во время действия с использованием операции AHLL, в соответствии с примерным вариантом осуществления по фиг.8. Рассматривая теперь фиг.1, 3-8, 12 и 13, примерный способ 835 начинается на этапе 1305, где вычислительная система 48 устанавливает новый предел нагрузки на крюк, как равный пределу нагрузки на крюк стрелы крана. Процесс затем продолжается до этапа 1310. На этапе 1315, вычислительная система 48 устанавливает новый предел нагрузки на крюк как равный минимальному пределу нагрузки на крюк.
На этапе 1310 рассчитывают новый предел измеренного веса. В некоторых примерных вариантах осуществления MWL рассчитывают с помощью вычислительной системы 48, и сумму нового предела нагрузки на крюк и нового среднего веса установки. На этапе 1320 передают запрос для определения, существует ли другое движение для окончания выполняемого действия. Если имеется другое движение для окончания действия, тогда обработка следует по ответвлению ДА на этап 1203 на фиг.12. В противном случае, обработка следует по ответвлению НЕТ до этапа КОНЕЦ на фиг.8.
Для каждого из описанных выше примерных вариантов осуществления, для которых была раскрыта вычислительная система 48, специалист в данной области техники распознает, что в альтернативных вариантах осуществления вычислительная система 48 может быть заменена переносным компьютером или может быть привязана к установке 20, или может быть установлена отдельно и/или дистанционно от установки 20, портативным вычислительным устройством, программируемым логическим контроллером или любым другим устройством, которое имеет функции логики и запоминающего устройства. В определенных примерных вариантах осуществления вычислительная система 48 представляет собой систему KEYVIEW съема данных установки через спутниковый канал передачи данных.
При выполнении каждого из способов, описанных выше и в любой момент времени, при выполнении любого из действий и процессов, цикл обучения может быть повторно запущен оператором, выполняющим определенные действия, включая в себя, но без ограничений, выбор кнопки "нулевой вес" в интерфейсе 700 пользователя, изменение способа взвешивания (то есть, модификации любых из измеренных факторов взвешивания), или выбора нового исходного предела нагрузки на крюк. Кроме того, во время каждого из процессов, описанных выше и в любой момент времени, при любом из этих действий и процессов, определенные события могут привести к повторному вводу установки 20 в цикл обучения, включающий в себя, но без ограничений, автоматизированное детектирование (например, с помощью вычислительной системы 48) любого изменения действий, активацию внутренних или внешних сигналов тревоги или неисправности датчика. Для каждого из них вычислительная система 48 может детектировать проблему и может либо продолжить нормальную операцию или выполнить возврат к циклу обучения.
В то время как примерные варианты выполнения были описаны со ссылкой на мобильную установку для технического обслуживания скважины, специалисты в данной области техники могут видеть, что способы могут также могут быть применены в любом устройстве, которое имеет циклические операции подъема и спуска, включающие в себя, но без ограничений, стационарную установку для технического обслуживания скважины, общий подъемный кран для технического обслуживания и буровую установку. Кроме того, в этих способах, описанных выше, в случае, когда одно значение сравнивают с другим значением для определения, является ли одно из них большим или меньше, чем другое, в альтернативных вариантах осуществления, сравнение может быть модифицировано для определения, является ли одно значение большим чем или равным или меньшим чем или равным другому значению вместо этого. Аналогично, в этих способах, описанных выше, в случае, когда одно значение сравнивают с другим значением, для определения, является ли первое значение большим чем или равным или меньшем чем или равным второму значению, в альтернативных вариантах осуществления, сравнение может быть модифицировано, для определения, является ли первое значение большим чем или меньшим чем второе значение.
Хотя изобретение описано со ссылкой на предпочтительные варианты осуществления, для специалистов в данной области техники должно быть понятно, что различные модификации вполне находятся в пределах объема изобретения. Учитывая описанное выше, следует понимать, что вариант осуществления настоящего изобретения преодолевает ограничения предшествующего уровня техники. Для специалиста в данной области техники будет понятно, что настоящее изобретение не ограничено каким-либо специально описанным вариантом применения и что варианты осуществления, описанные здесь, являются иллюстративными, а не ограничительными. Из описания примерных вариантов осуществления эквиваленты элементов, показанные здесь, очевидны для специалистов в данной области техники, и способы построения других вариантов осуществления настоящего изобретения будут очевидны для лиц, занимающихся практическими вопросами в данной области техники. Поэтому объем настоящего изобретения должен быть ограничен только любыми пунктами следующей формулы изобретения.
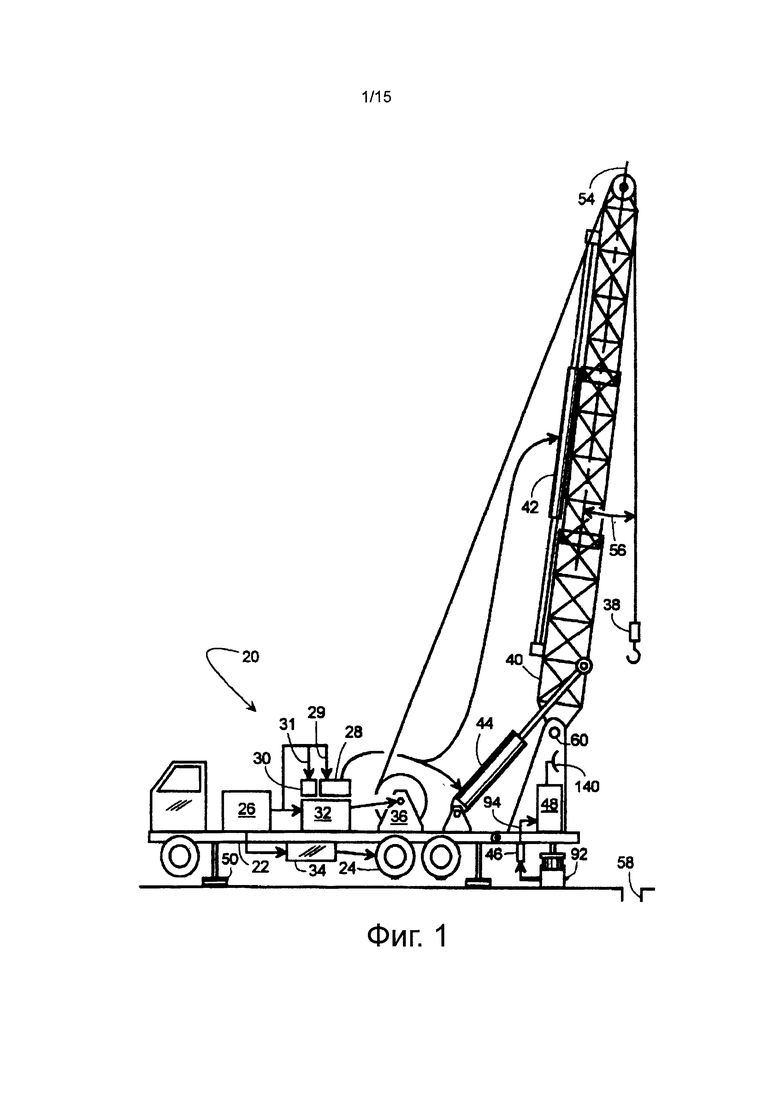
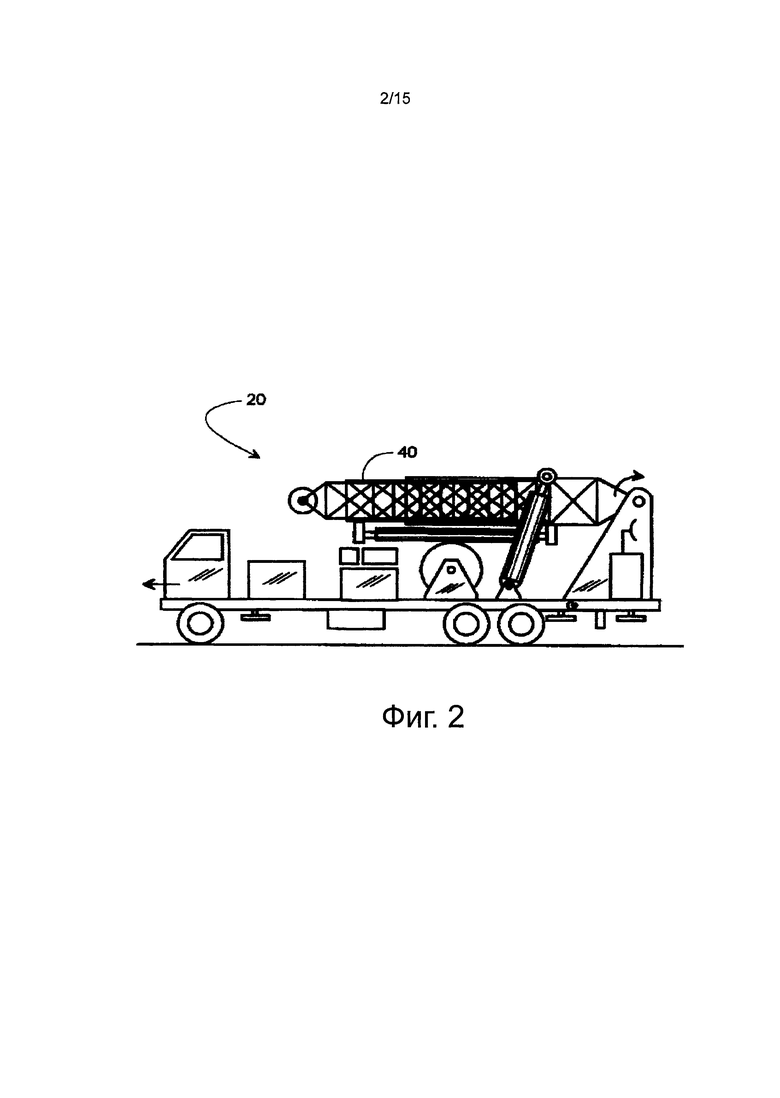
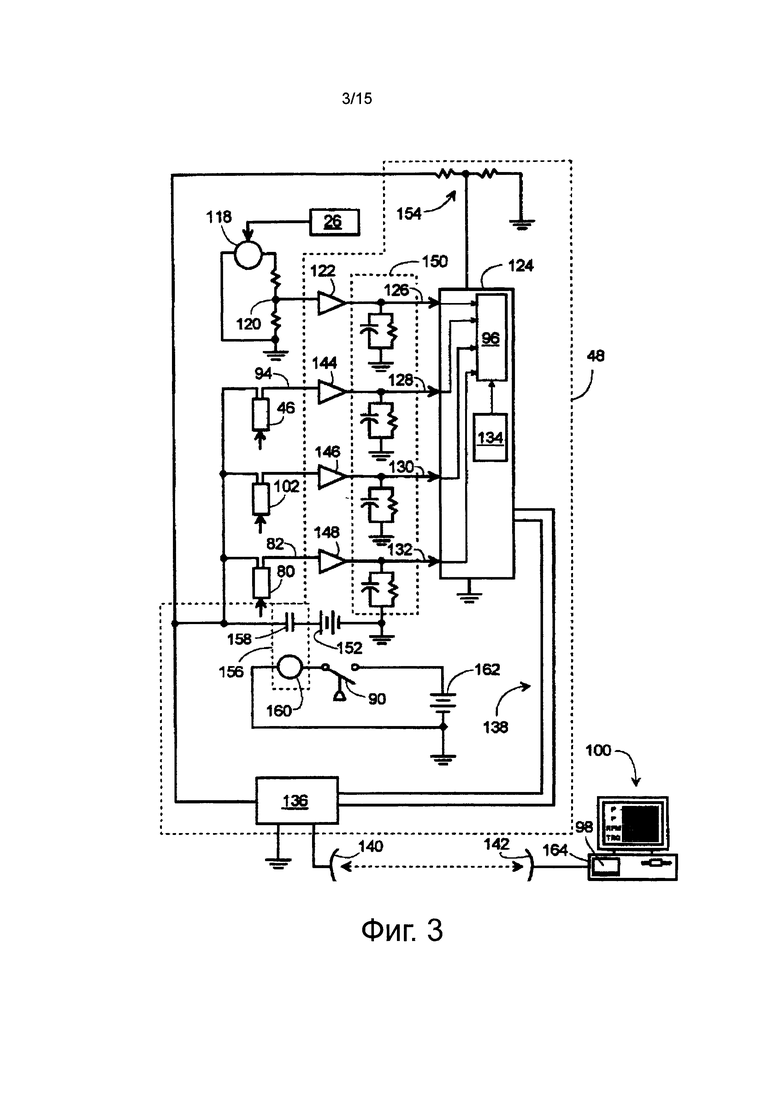
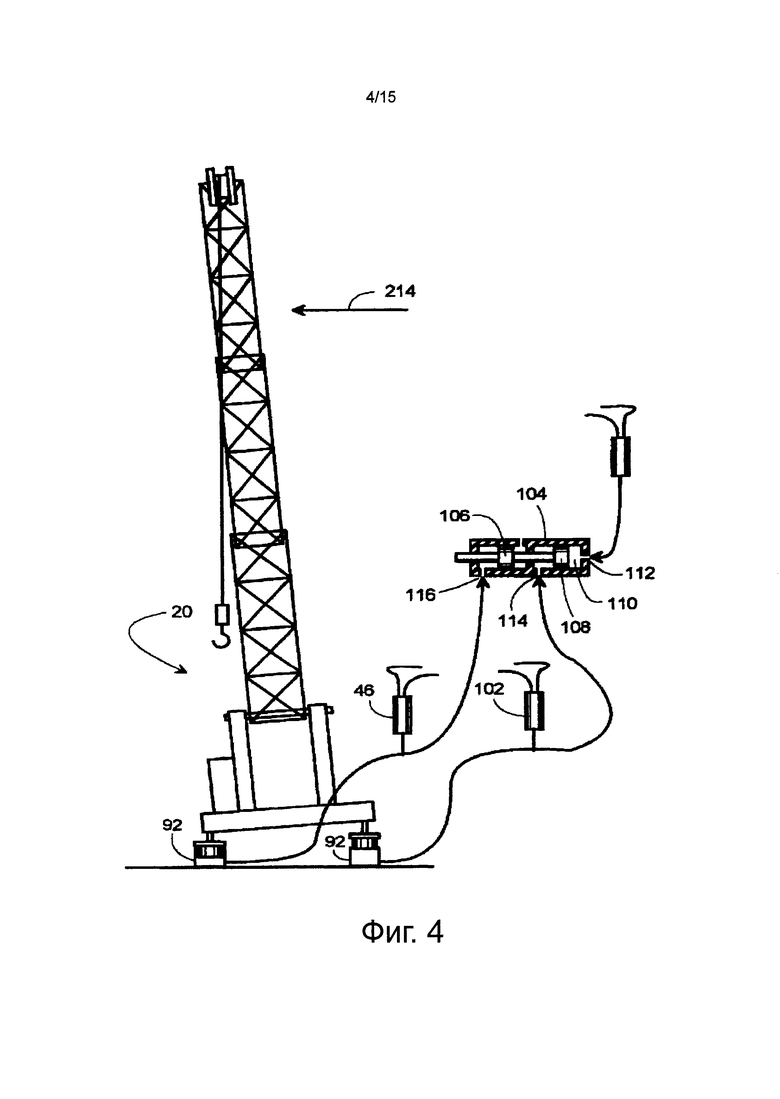
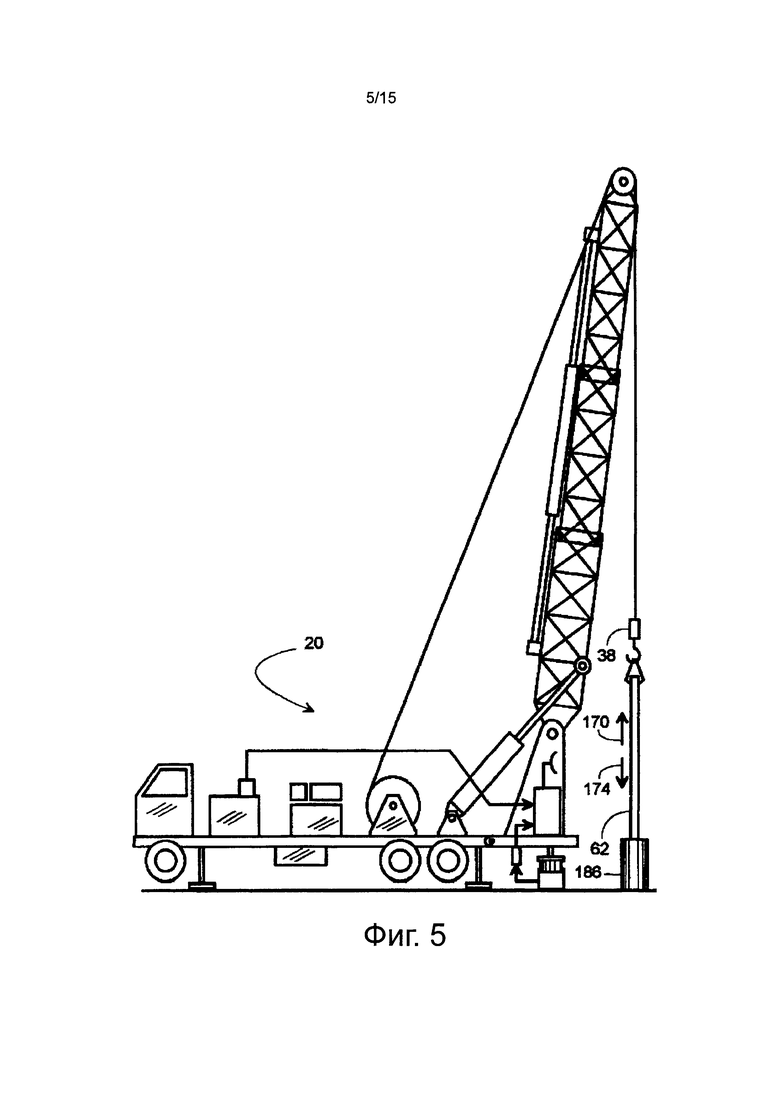
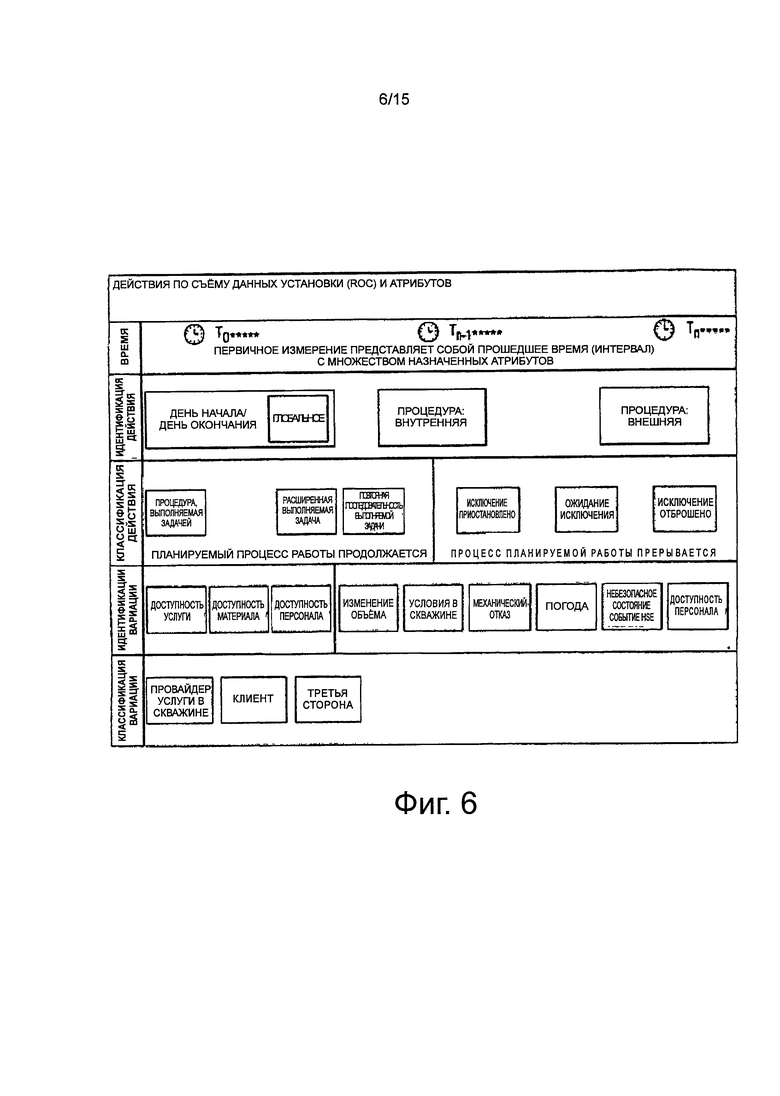
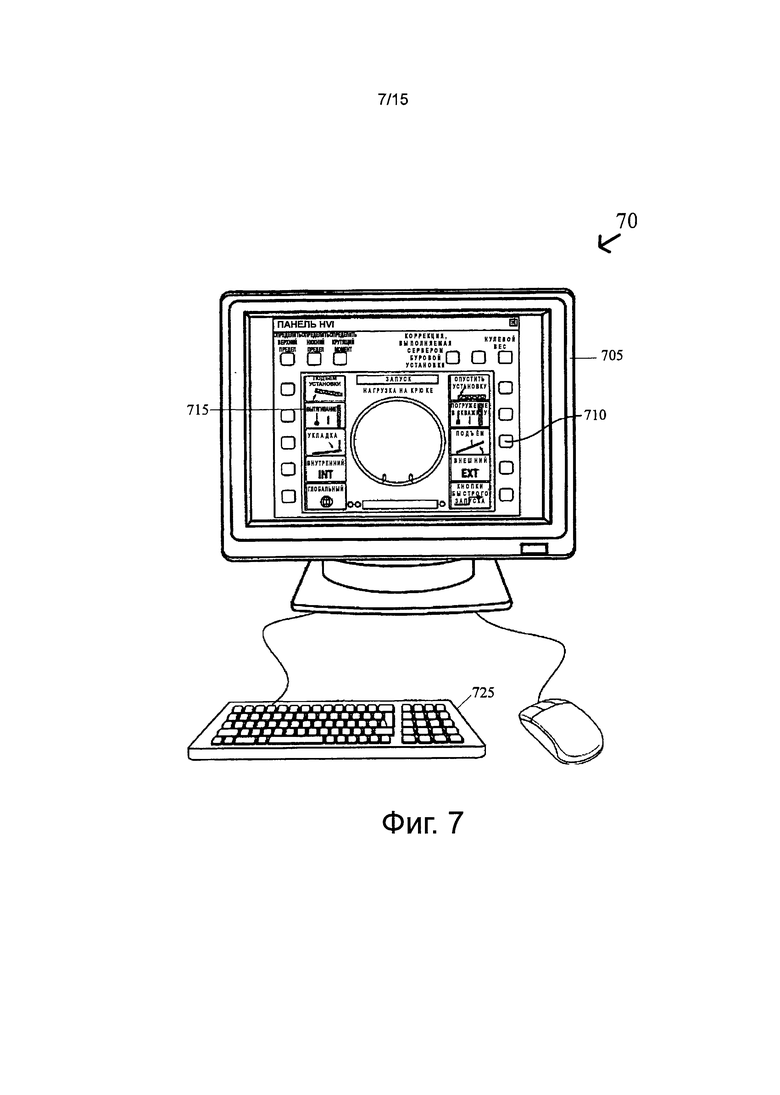
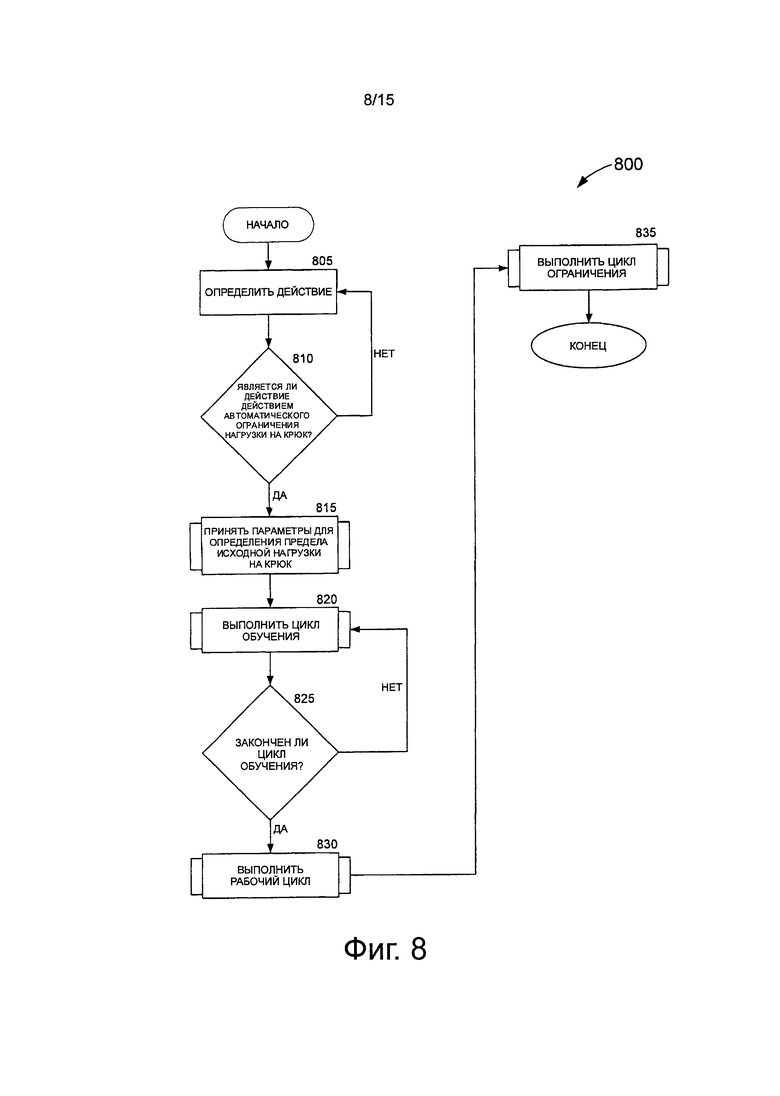
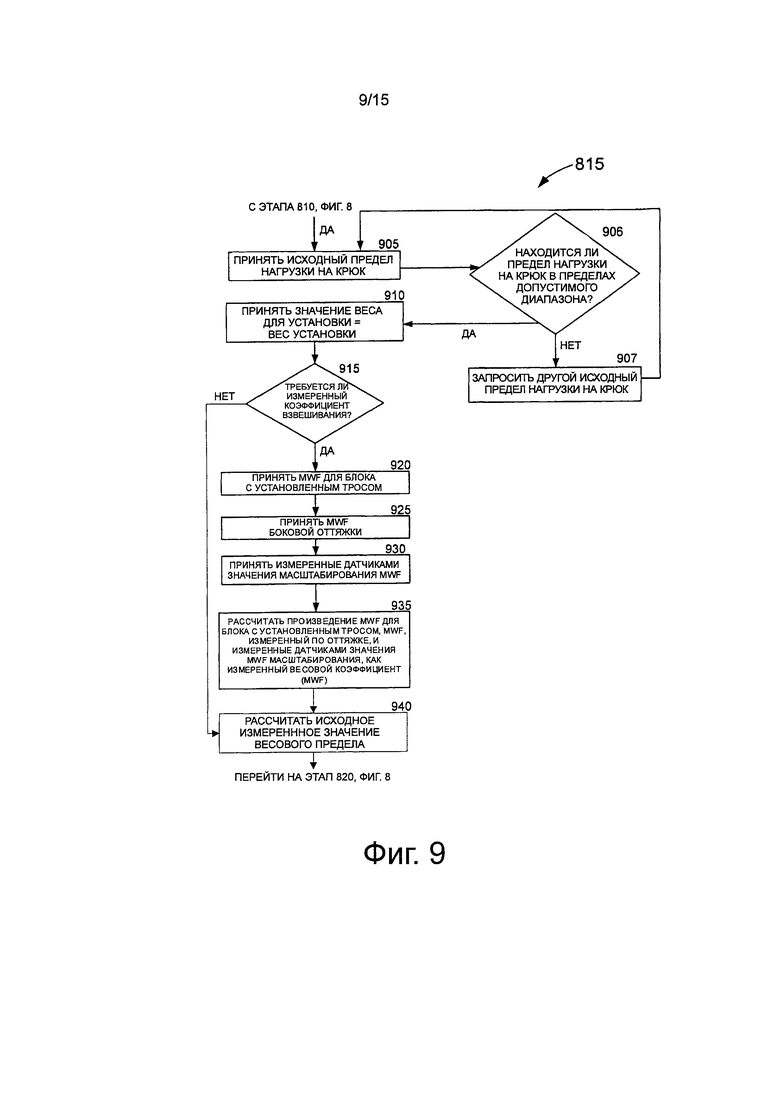
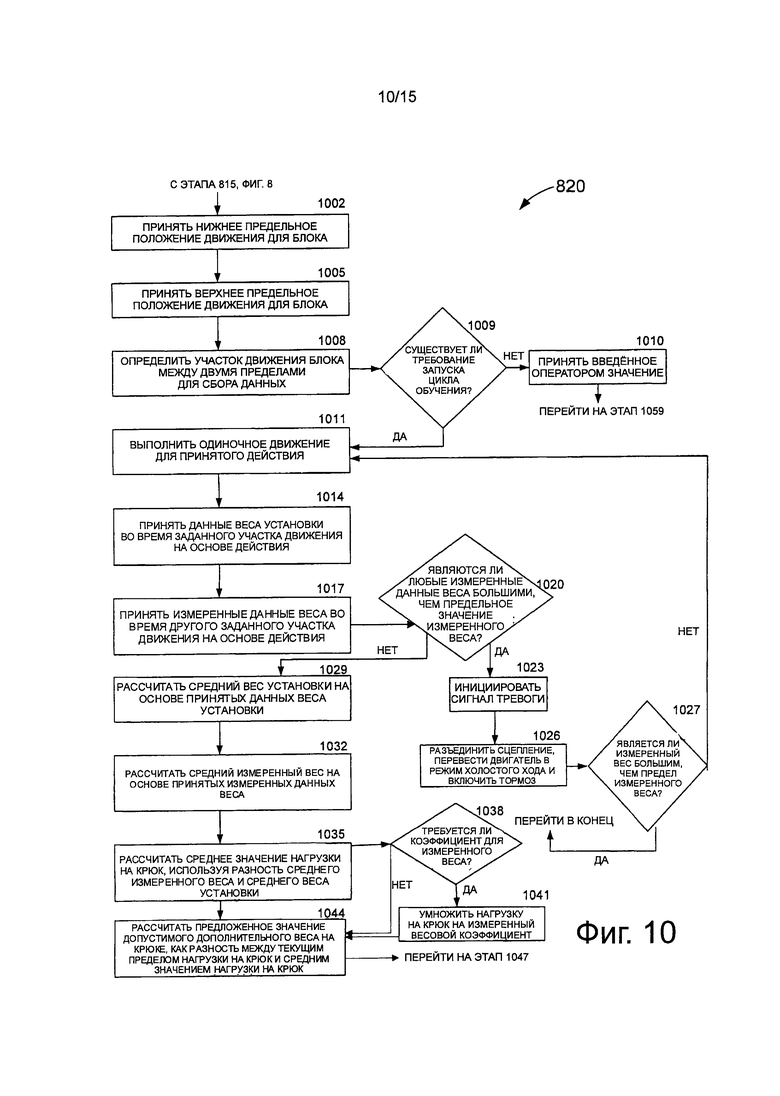

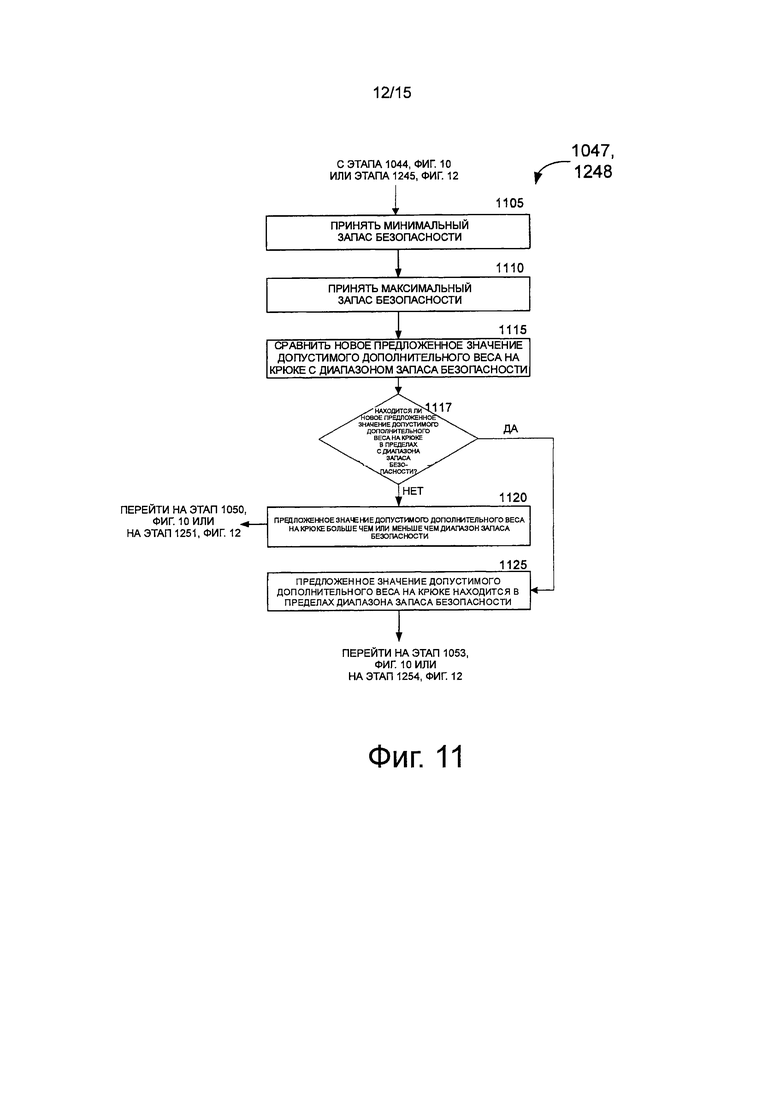
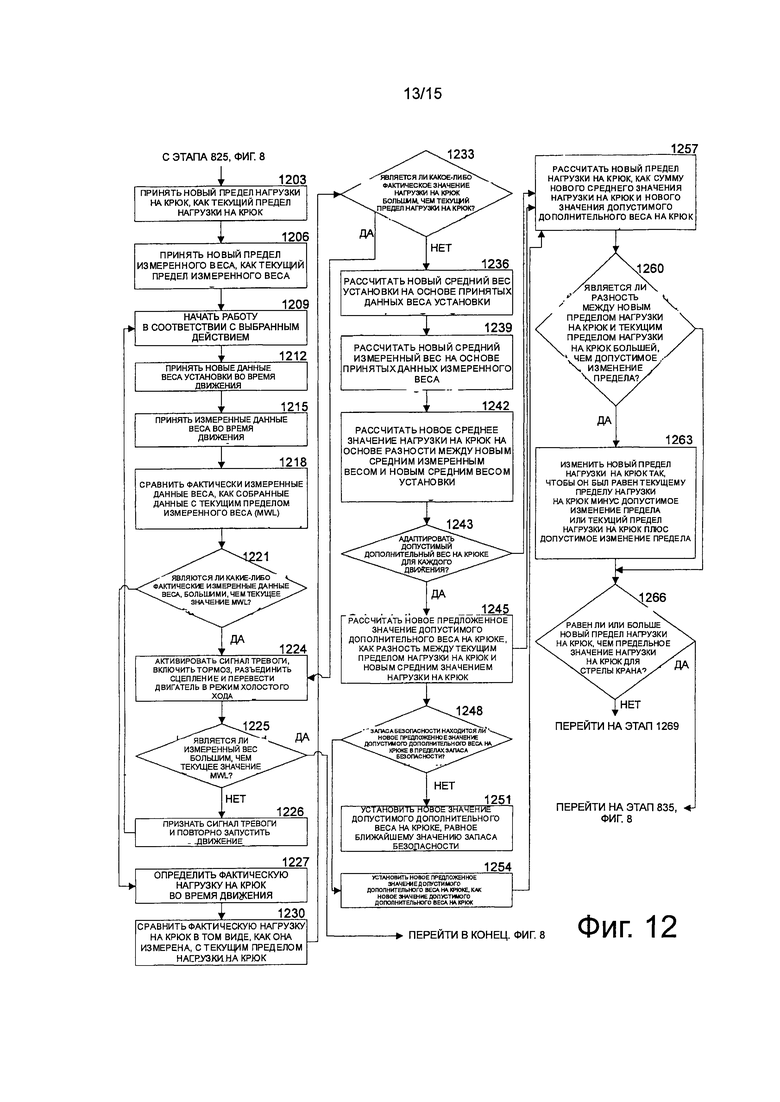
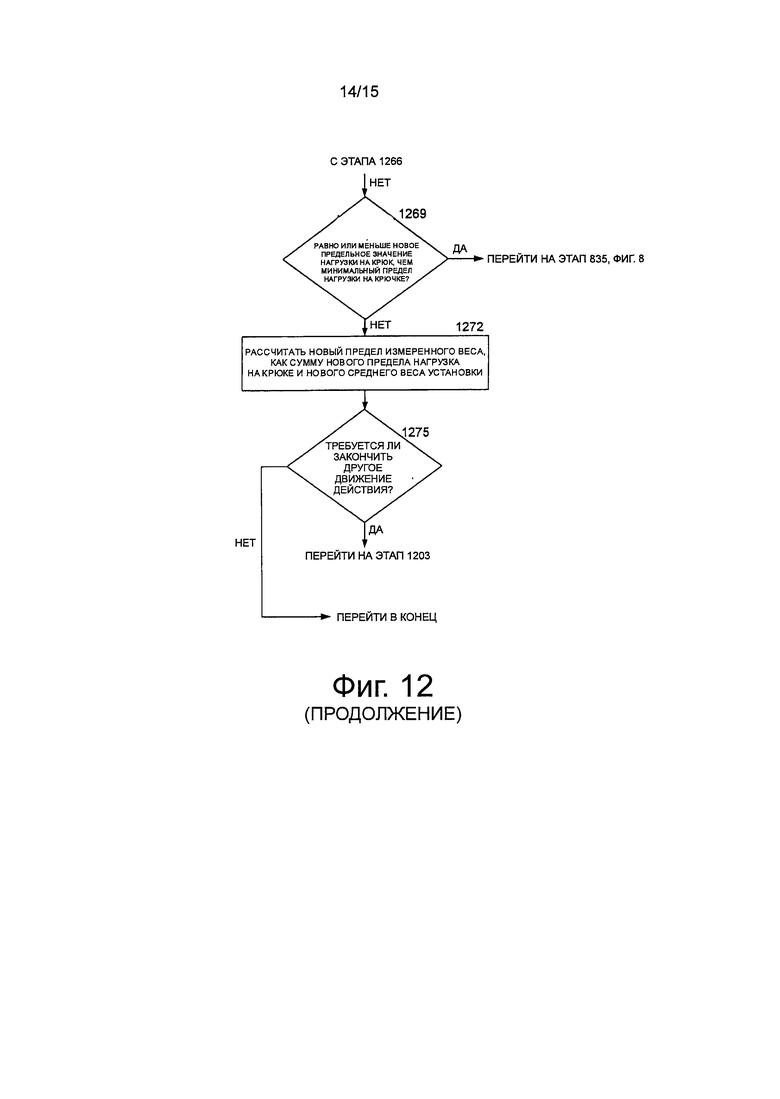
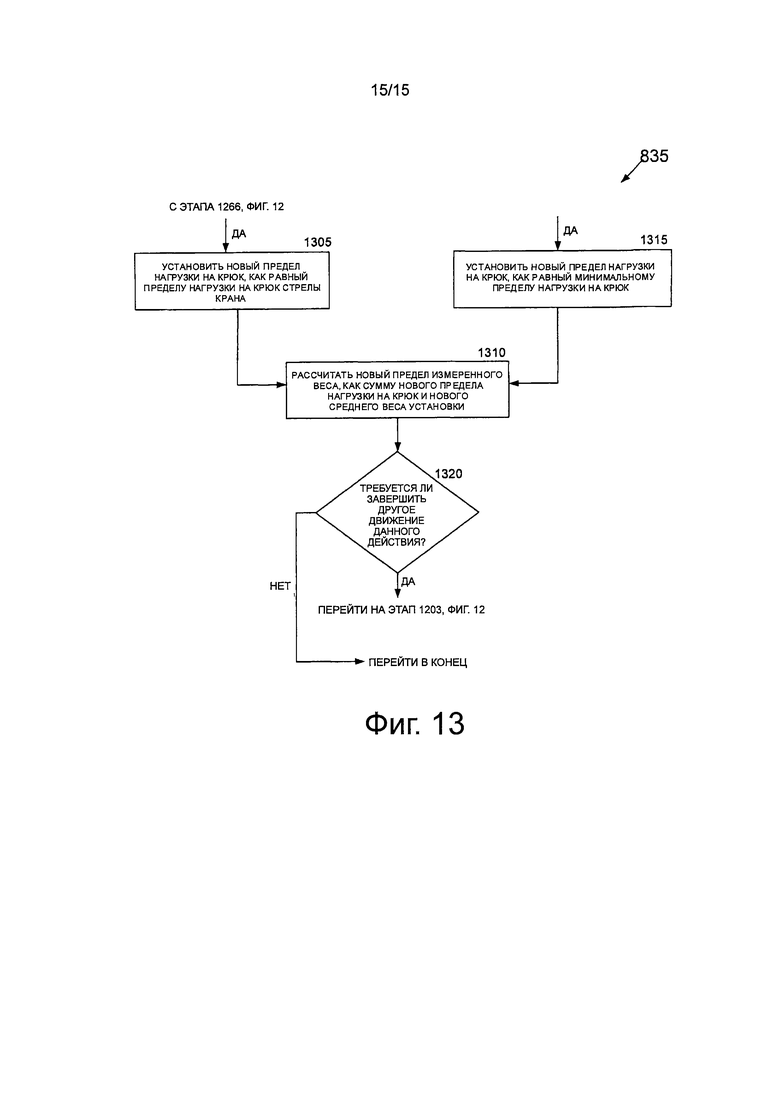
Изобретение относится к оборудованию, используемому для технического обслуживания скважин. Техническим результатом является предотвращение повреждения установки технического обслуживания и возникновения опасности для рабочих вокруг головки скважины. Способ и система для автоматической установки регулирования и мониторинга пределов на основе нагрузки выполнены с возможностью мониторинга нагрузки на крюке, веса установки и комбинированных измеренных значений веса и сравнения этих параметров с предельными значениями. Если любое из значений нагрузки на крюк, веса установки или измеренного веса приводит к увеличению уровня с выходом за его пределы, система выполнена с возможностью регулирования работы установки для технического обслуживания скважины, для ограничения повреждения оборудования и возникновения опасности для операторов и обслуживающего персонала. Система также выполнена с возможностью регулирования каждого из пределов как веса установки и фактического изменения нагрузки на крюк с течением времени при выполнении действия для поддержания соответствующих пределов в наиболее предпочтительном диапазоне. 3 н. и 15 з.п. ф-лы, 13 ил.
1. Способ для управления нагрузкой на крюк установки для технического обслуживания скважины, содержащий следующие этапы:
принимают первое предельное значение нагрузки на крюк в вычислительной системе;
выполняют первый цикл действий в скважине;
принимают данные нагрузки на крюк во время первого цикла действия;
в вычислительной системе сравнивают каждое значение данных нагрузки на крюк с первым предельным значением нагрузки на крюк;
останавливают первый цикл действий, если, по меньшей мере, одно из значений данных нагрузки на крюк будет больше, чем первый предел нагрузки на крюк;
определяют в вычислительной системе первое среднее значение нагрузки на крюк;
рассчитывают с помощью вычислительной системы второе предельное значение нагрузки на крюк на основе первого среднего значения нагрузки на крюк и значения допустимого дополнительного веса на крюке;
выполняют второй цикл действий в скважине;
принимают второй набора данных нагрузки на крюк во время второго цикла; и
сравнивают, по меньшей мере, часть значений данных нагрузки на крюк во втором наборе данных нагрузки на крюк со вторым пределом нагрузки на крюк.
2. Способ по п. 1, в котором второй предел нагрузки на крюк представляет собой сумму первого среднего значения нагрузки на крюк и значения допустимого дополнительного веса на крюке.
3. Способ по п. 1, дополнительно содержащий следующие этапы:
принимают первый предел измеренного веса в вычислительной системе;
принимают измеренные данные веса во время первого цикла действия, в котором измеренный вес представляет собой сумму веса установки и нагрузки на крюк установки для технического обслуживания скважины;
используя вычислительную систему, которая выполняет сравнение каждого измеренного значения данных веса с первым пределом измеренного веса; и
рассчитывают с помощью вычислительной системы второй предел измеренного веса.
4. Способ по п. 3, дополнительно содержащий этап остановки первого цикла действия, если, по меньшей мере, одни из измеренных значений данных веса будут больше, чем первый предел измеренного веса.
5. Способ по п. 3, дополнительно содержащий следующие этапы:
принимают данные веса установки во время первого цикла действий;
определяют с помощью вычислительной системы первое среднее значение веса установки; и
в котором второй предел измеренного веса представляет собой сумму второго предела нагрузки на крюк и первого среднего веса установки.
6. Способ по п. 1, дополнительно содержащий следующие этапы:
принимают данные веса установки во время первого цикла действий;
определяют с помощью вычислительной системы первое среднее измеренное значение веса;
определяют с помощью вычислительной системы первый средний вес установки; и
определяют с помощью вычислительной системы первое среднее значение нагрузки на крюк на основе первого среднего веса установки и первого среднего измеренного веса.
7. Способ по п. 6, в котором первое среднее значение нагрузки на крюк представляет собой разность первого среднего измеренного веса и первого среднего веса установки.
8. Способ по п. 1, дополнительно содержащий следующие этапы:
рассчитывают с помощью вычислительной системы предложенное значение допустимого дополнительного веса на крюке на основе первого предела нагрузки на крюк и первого среднего значения нагрузки на крюк; и
в котором предложенное значение допустимого дополнительного веса на крюке рассчитывают как разность между первым пределом нагрузки на крюк и первым средним значением нагрузки на крюк;
9. Способ по п. 8, дополнительно содержащий следующие этапы:
определяют с помощью вычислительной системы, находится ли предложенное значение допустимого дополнительного веса на крюке в пределах диапазона запаса безопасности; и
устанавливают предложенное значение допустимого дополнительного веса на крюке, как значение допустимого дополнительного веса на крюке на основе положительного определения, что предложенное значение допустимого дополнительного веса на крюке находится в пределах диапазона запаса безопасности.
10. Способ по п. 8, дополнительно содержащий следующие этапы:
определяют с помощью вычислительной системы, находится ли предложенное значение допустимого дополнительного веса на крюке в пределах диапазона запаса безопасности; и
устанавливают значение допустимого дополнительного веса на крюке, как равное внешней границе диапазона запаса безопасности, на основе отрицательного определения, что предложенное значение допустимого дополнительного веса на крюке находится в пределах диапазона запаса безопасности.
11. Способ по п. 1, дополнительно содержащий этап определения с помощью вычислительной системы, превышает ли разность между первым пределом нагрузки на крюк и вторым пределом нагрузки на крюк допустимое изменение;
12. Способ по п. 11, дополнительно содержащий этап регулирования второго предела нагрузки на крюк, так, чтобы он был равен сумме первого предела нагрузки на крюк и допустимого изменения на основе положительного определения того, что разность превышает допустимое изменение.
13. Способ по п. 11, дополнительно содержащий этап регулирования второго предела нагрузки на крюк так, чтобы он был равен разности первого предела нагрузки на крюк и допустимого изменения на основе положительного определения того, что разность между первым пределом нагрузки на крюк и вторым пределом нагрузки на крюк превышает допустимое изменение.
14. Способ по п. 1, дополнительно содержащий следующие этапы:
определяют с помощью вычислительной системы, является ли второй предел нагрузки на крюк большим, чем или равным максимальному пределу нагрузки на крюк стрелы крана; и
регулируют второй предел нагрузки на крюк так, чтобы он был равен максимальному пределу нагрузки на крюк стрелы крана.
15. Способ по п. 1, дополнительно содержащий следующие этапы:
определяют с помощью вычислительной системы, является ли второй предел нагрузки на крюк меньшим чем или равным минимальному пределу нагрузки на крюк; и
регулируют второй предел нагрузки на крюк так, чтобы он был равным минимальному пределу нагрузки на крюк.
16. Способ для управления нагрузкой на крюк установки для технического обслуживания скважин, содержащий следующие этапы:
выполняют первый цикл действий в скважине;
принимают в вычислительной системе первый набор данных, основанных на нагрузке, во время первого цикла;
определяют с помощью вычислительной системы предел нагрузки на крюк для установки для технического обслуживания скважин; и
выполняют второй цикл действий, следующих после первого цикла, в установке для технического обслуживания скважин; и
принимают второй набор данных на основе нагрузки во время второго цикла;
сравнивают, по меньшей мере, часть второго набора данных на основе нагрузки с пределом нагрузки на крюк;
принимают в вычислительной системе первый измеренный предел веса;
принимают данные веса установки для технического обслуживания скважин во время первого цикла действий;
принимают измеренные данные веса во время первого цикла действий, в котором измеренный вес представляет собой сумму веса устройства и нагрузки на крюк установки для технического обслуживания скважин;
в вычислительной системе сравнивают каждое измеренное значение данных веса с первым измеренным пределом веса;
останавливают первый цикл действий, если, по меньшей мере, одни из измеренных значений данных веса будут больше, чем первый измеренный предел веса;
определяют с помощью вычислительной системы первый средний вес установки для технического обслуживания скважин;
рассчитывают с помощью вычислительной системы второй предел измеренного веса, в котором второй предел измеренного веса представляет собой сумму второго предела нагрузки на крюк и первого среднего веса установки для технического обслуживания скважин.
17. Способ по п. 16, дополнительно содержащий этап предотвращения завершения второго цикла, если любой участок второго набора на основе нагрузки будет больше, чем предел нагрузки на крюк.
18. Способ для управления нагрузкой на крюк в установки для технического обслуживания скважин, содержащий следующие этапы:
принимают первое предельное значение нагрузки на крюк в вычислительной системе;
выполняют первый цикл действия в скважине;
принимают множество точек данных веса установки для технического обслуживания скважин во время первого цикла действий;
принимают множество измеренных точек веса во время первого цикла действий, в котором измеренный вес представляет собой сумму веса установки для технического обслуживания скважин и веса нагрузки на крюк;
определяют с помощью вычислительной системы множество значений данных нагрузки на крюк путем расчета разности, по меньшей мере, участка каждой из множества измеренных точек веса и, по меньшей мере, участка каждой из множества точек данных веса установки для технического обслуживания скважин;
используя вычислительную систему, сравнивают, по меньшей мере, участок точек данных нагрузки на крюк с первым пределом нагрузки на крюк;
определяют с помощью вычислительной системы первый средний вес установки для технического обслуживания скважин на основе, по меньшей мере, участка из множества точек данных веса установки для технического обслуживания скважин;
определяют с помощью вычислительной системы первый средний измеренный вес на основе, по меньшей мере, части из множества точек измеренных данных веса;
определяют с помощью вычислительной системы первое среднее значение нагрузки на крюк путем расчета разности первого среднего значения измеренного веса и первого среднего значения веса установки для технического обслуживания скважин;
рассчитывают с помощью вычислительной системы значение допустимого дополнительного веса на крюке, как разность первого предела нагрузки на крюк и первого среднего значения нагрузки на крюк;
рассчитывают с помощью вычислительной системы второй предел нагрузки на крюк на основе первого среднего значения нагрузки на крюк и значения допустимого дополнительного веса на крюк;
выполняют второй цикл действий в скважине;
принимают второй набор данных нагрузки на крюк во время второго цикла; и
сравнивают, по меньшей мере, участок значений данных нагрузки на крюк во втором наборе данных нагрузки на крюк со вторым пределом нагрузки на крюк.
| СТРЕЛОВОЙ КРАН С ПОВОРОТНОЙ ПЛАТФОРМОЙ | 1993 |
|
RU2034773C1 |
| WO 2009032889 A1, 12.03.2009 | |||
| US 2004065874 A1, 08.04.2004 | |||
| US 2004068394 A1, 08.04.2004. | |||

