Настоящее изобретение, в общем, относится к системам регулирования привода для строительных машин, включающих фрезерный барабан, например, таких как фрезерные машины, проходческие комбайны для открытых работ или машины для стабилизации грунта/рециклинга дорожного покрытия. Адаптивная система регулирования движущего привода для подобных машин способствует предотвращению явлений крена вперед, когда машина работает в режиме попутного фрезерования.
Во время нормальной работы строительной машины, имеющей фрезерный барабан, необходимо, чтобы у водителя была возможность сохранять управление при продвижении машины вперед и назад независимо от работы фрезерного барабана. Если противодействующие силы, прикладываемые поверхностью грунта к фрезерному барабану, превышают управляющие усилия, прикладываемые к фрезерному барабану за счет массы, движущей силы и тормозного усилия строительной машины, то может возникнуть явление крена вперед или назад строительной машины. Если строительная машина работает в режиме попутного фрезерования, противодействующие вращающемуся фрезерному барабану силы могут стать причиной крена строительной машины вперед, или если вращающийся фрезерный барабан работает в режиме встречного фрезерования, противодействующие вращающемуся фрезерному барабану силы могут стать причиной крена строительной машины назад. А если строительная машина находится в процессе слишком быстрого опускания в обрабатываемый участок, противодействующая вращающемуся фрезерный барабану сила может стать причиной крена строительной машины вперед или назад в зависимости от режима фрезерования, т.е. режима попутного фрезерования или режима встречного фрезерования.
Системы предшествующего уровня техники, как правило, сталкиваются с подобными нежелательными явлениями, определяя явление после того, как оно произошло, а затем выключая работающие системы машины. Примеры можно увидеть в патенте США 4,929,121 на имя Lent и др.; патенте США 5,318.378 на имя Lent; и патенте США 5,879,056 на имя Breidenbach.
Задача изобретения заключается в том, чтобы усовершенствовать системы для поддержания управления строительных машин, имеющих фрезерный барабаны, а в частности для уменьшения или полного устранения возникновения явлений крена (крена вперед или назад).
Данная задача достигается с помощью способов по пункту 1 или 2 формулы изобретения или устройств по пунктам 9 или 10 формулы изобретения.
В первом варианте осуществления предложен способ регулирования строительной машины, имеющей раму, фрезерный барабан, поддерживаемый рамой, для фрезерования поверхности грунта, множество взаимодействующих с землей опор, взаимодействующих с поверхностью грунта и поддерживающих раму, и движущий привод, связанный с по меньшей мере одной из взаимодействующих с землей опор для обеспечения движущей силы по меньшей мере одной взаимодействующей с землей опоре. Способ включает следующие этапы, на которых:
Фрезерный барабан приводят в действие в режиме попутного фрезерования (этап а). Движущую силу подают к движущему приводу и перемещают строительную машину вперед со скоростью продвижения (этап b). Измеряют параметр, соответствующий противодействующей силе, действующей на фрезерный барабан (этап с). Определяют изменение параметра, соответствующее увеличению противодействующей силы (этап d). В ответ на определение изменения, и при продолжении приведения в действие фрезерного барабана в режиме попутного фрезерования, уменьшают движущую силу, передаваемую на движущий привод, для уменьшения скорости рабочего хода и, тем самым, уменьшают противодействующую силу для предотвращения явления крена вперед (этап е).
Во втором варианте осуществления предложен способ регулирования строительной машины, имеющей раму и фрезерный барабан, поддерживаемый рамой, для фрезерования поверхности грунта. Фрезерный барабан вращают (этап а). Вращающийся фрезерный барабан опускают относительно поверхности грунта (этап b). Измеряют параметр, соответствующий противодействующей силе, действующей на фрезерный барабан (этап с). Определяют изменение параметра, соответствующее увеличению противодействующей силы (этап d). В ответ на определение изменения и при продолжении вращения фрезерного барабана замедляют скорость опускания фрезерного барабана, тем самым предотвращая явление крена вперед или назад (этап е).
Этап (е) первого или второго варианта осуществления может дополнительно включать в себя прикладывание усилия торможения к по меньшей мере одной из взаимодействующих с землей опор. Предпочтительно, это дополнительно осуществляют на этапе (е).
Этап (е) первого варианта осуществления может дополнительно включать в себя предотвращение превышения скорости продвижения строительной машины над выбранной рабочей скоростью. Строительная машина предпочтительно включает в себя корпус фрезерного барабана, поддерживающий фрезерный барабан на раме, при этом на этапе (с) первого варианта осуществления измеряемый параметр представляет собой выходной сигнал по меньшей мере от одного тензометрического датчика, расположенного на раме или на корпусе фрезерного барабана.
На этапе (с) по меньшей мере один тензометрический датчик может быть ориентирован так, что измеряемый параметр соответствует составляющей противодействующей силы, ориентированной по существу перпендикулярно поверхности грунта.
По меньшей мере один тензометрический датчик может также быть ориентирован по существу перпендикулярно поверхности грунта.
Измеряемый параметр может представлять собой выходные сигналы по меньшей мере от двух тензометрических датчиков, расположенных на противоположных сторонах рамы или корпуса фрезерного барабана.
В качестве альтернативы, измеряемый параметр может представлять собой выходной сигнал от динамометрического датчика, функционально связанного с рамой и/или фрезерным барабаном.
В любом из приведенных выше альтернативных вариантов осуществления может быть измерено давление в гидравлическом силовом цилиндре, соединяющем одну из взаимодействующих с землей опор с рамой; и, если измеренное давление в гидравлическом силовом цилиндре падает ниже заданного значения, работа фрезерного барабана будет остановлена.
В дополнительном альтернативном варианте осуществления измеренный параметр на этапе (с) может представлять собой выходной сигнал от по меньшей мере одного тензометрического датчика, расположенного на раме, который измеряет изгиб рамы.
Измеренный параметр на этапе (с) может также представлять собой нагрузку в по меньшей мере одном подшипнике, поддерживающем с возможностью вращения фрезерный барабан на раме.
Этап (d) первого и второго вариантов осуществления может дополнительно включать определение, находится ли противодействующая сила в пределах рабочего диапазона, устанавливаемого как диапазон процентных отношений массы строительной машины, при этом диапазон ограничен нижней границей, большей чем 0%, и верхней границей, меньшей чем 100%; а этап (е) может дополнительно включать уменьшение скорости продвижения или замедление скорости опускания фрезерного барабана только, если противодействующая сила находится в пределах или выше рабочего диапазона.
Этап (е) первого варианта осуществления может дополнительно включать уменьшение скорости продвижения в линейном соотношении к противодействующей силе во всем рабочем диапазоне. Этап (е) первого и второго вариантов осуществления в качестве альтернативы может дополнительно включать уменьшение движущей силы к движущему приводу до нуля или остановку опускания вращающегося фрезерного барабана в поверхность грунта, если противодействующая сила равна или больше, чем верхняя граница рабочего диапазона.
В качестве примера, на этапе (d) нижняя граница составляет по меньшей мере 50%, а верхняя граница составляет не больше чем 95%.
На этапе (с) первого и второго вариантов осуществления измеренный параметр может представлять собой выходной сигнал от по меньшей мере одного тензометрического датчика, расположенного на раме или на корпусе фрезерного барабана, или выходные сигналы от по меньшей мере двух тензометрических датчиков, расположенных на противоположных сторонах рамы или корпуса фрезерного барабана, выходной сигнал от динамометрического датчика, функционально связанного с рамой или фрезерным барабаном, выходной сигнал от по меньшей мере одного тензометрического датчика, расположенного на раме и измеряющего изгиб рамы, нагрузку в по меньшей мере одном подшипнике, поддерживающем с возможностью вращения фрезерный барабан на раме.
Задача также достигается посредством признаков пункта 9 или 10 формулы изобретения.
В первом варианте осуществления строительная машина содержит раму и фрезерный барабан, поддерживаемый рамой, для фрезерования поверхности грунта. Фрезерный барабан выполнен с возможностью приведения в действие в режиме попутного фрезерования. Со стороны поверхности грунта раму поддерживает множество взаимодействующих с землей опор. По меньшей мере с одной из взаимодействующих с землей опор связан движущий привод для обеспечения движущей силы для продвижения строительной машины по поверхности грунта. Датчик выполнен с возможностью определения параметра, соответствующего противодействующей силе со стороны поверхности грунта, действующей на фрезерный барабан. Исполнительный механизм функционально связан с движущим приводом для регулирования выходной движущей силы посредством движущего привода. Контроллер соединен с датчиком для приема входного сигнала от датчика и соединен с исполнительным механизмом для отправки управляющего сигнала исполнительному механизму. Контроллер включает в себя рабочую программу, которая определяет изменение измеренного параметра, соответствующее увеличению противодействующей силы, и в ответ на изменение уменьшает движущую силу, передаваемую к движущему приводу, для содействия предотвращению явления крена вперед строительной машины.
Во втором варианте осуществления строительная машина содержит раму и фрезерный барабан, поддерживаемый рамой, для фрезерования поверхности грунта. Множество взаимодействующих с землей опор поддерживает раму со стороны поверхности грунта. По меньшей мере один датчик выполнен с возможностью определения параметра, соответствующего противодействующей силе со стороны поверхности грунта, действующей на фрезерный барабан. Исполнительное средство функционально связано с фрезерным барабаном или с рамой для регулирования скорости, с которой фрезерный барабан опускается в поверхность грунта. Контроллер соединен с датчиком для приема входного сигнала от датчика и соединен с исполнительным механизмом для отправки управляющего сигнала исполнительному механизму. Контроллер включает в себя рабочую программу, которая определяет изменение измеренного параметра, соответствующее увеличению противодействующей силы, и в ответ на изменение уменьшает скорость, с которой фрезерный барабан опускается для содействия предотвращению явления крена вперед или назад строительной машины.
Исполнительное средство может представлять собой исполнительный механизм, связанный с движущим приводом, или подъемные исполнительные механизмы, связанные с рамой для поднятия или опускания фрезерного барабана вместе с рамой.
Строительная машина согласно обоим вариантам осуществления может дополнительно содержать систему торможения, соединенную с одной или более взаимодействующих с землей опор; при этом с тормозной системой также соединен контроллер, а рабочая программа дополнительно направляет тормозную систему для приложения усилия торможения для содействия предотвращению явления крена вперед.
Датчик согласно обоим вариантам осуществления строительной машины может содержать по меньшей мере один тензометрический датчик.
По меньшей мере один тензометрический датчик может иметь ось датчика, ориентированную так, что по меньшей мере большая часть усилия, измеряемого тензометрическим датчиком, ориентирована перпендикулярно поверхности грунта.
По меньшей мере один тензометрический датчик может быть расположен на раме.
Может быть предусмотрено по меньшей мере два тензометрических датчика на противоположных сторонах рамы.
Строительная машина может дополнительно содержать: корпус фрезерного барабана, поддерживающий фрезерный барабан на раме; при этом на корпусе фрезерного барабана расположен по меньшей мере один тензометрический датчик.
В качестве альтернативы, на противоположных сторонах корпуса фрезерного барабана могут быть предусмотрены по меньшей мере два тензометрических датчика.
В дополнительном варианте осуществления датчик может содержать по меньшей мере один динамометрический датчик.
Датчик может содержать по меньшей мере один тензометрический датчик, прикрепленный к раме и ориентированный для определения изгиба рамы.
В альтернативном варианте осуществления датчик может содержать по меньшей мере один датчик нагрузки на подшипник.
Рабочая программа контроллера может определять, находится ли противодействующая сила в пределах рабочего диапазона, продолжающегося от нижней границы до верхней границы, при этом рабочая программа уменьшает в первом варианте осуществления движущую силу к движущему приводу или уменьшает во втором варианте осуществления скорость опускания фрезерного барабана в поверхность грунта, если противодействующая сила находится в пределах рабочего диапазона.
Рабочая программа может уменьшать движущую силу до нуля, если противодействующая сила равна или выше верхней границы рабочего диапазона.
Многочисленные задачи, признаки и преимущества настоящего изобретения станут понятными специалистам в данной области техники при прочтении приведенного ниже описания, рассматриваемого в сочетании с прилагаемыми чертежами.
Фиг.1 представляет собой вертикальный вид сбоку строительной машины.
Фиг.2 представляет собой схематичный вертикальный вид сбоку, показывающий фрезерный барабан, работающий в режиме попутного фрезерования.
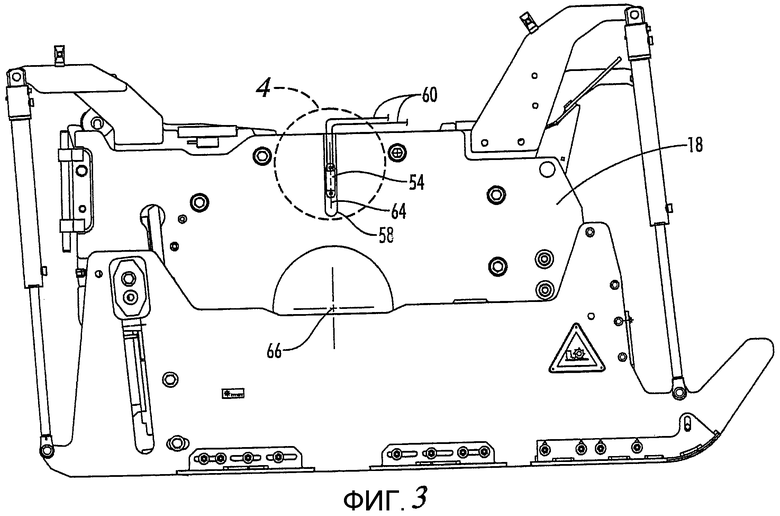
Фиг.3 представляет собой вертикальный вид сбоку корпуса фрезерного барабана строительной машины по фиг.1 и иллюстрирует положение сенсорного элемента тензометрического датчика на корпусе фрезерного барабана над осью вращения фрезерного барабана.
Фиг.4 представляет собой увеличенное изображение тензометрического датчика, установленного в корпусе фрезерного барабана по фиг.3.
Фиг.5 представляет собой схематичную иллюстрацию системы управления.
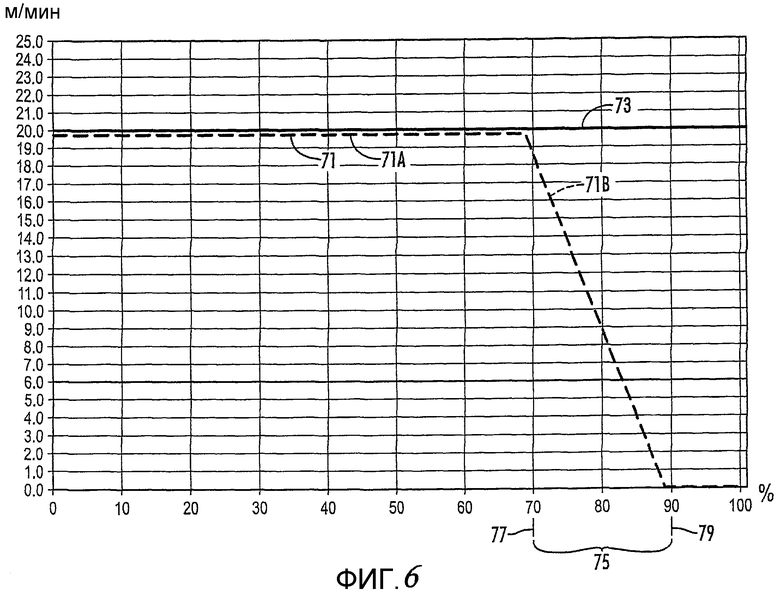
Фиг.6 представляет собой графическую иллюстрацию, показывающую один пример способа, в котором система управления может уменьшить скорость продвижения строительной машины, на основании измеренной противодействующей силы, воздействующей на фрезерный барабан. Как показано пунктирной линией, скорость рабочего хода уменьшается по линейному закону в пределах рабочего диапазона, при этом противодействующая фрезерному барабану сила увеличивается от приблизительно 70% массы машины до приблизительно 90% массы машины. Сплошная линия представляет заданное значение необходимой скорости продвижения машины.
Фиг.7 представляет собой графическое отображение данных, взятых во время фактической работы системы управления. Верхняя часть графика показывает фактическую измеренную скорость продвижения, в отличие от заданного значения скорости продвижения. Нижняя часть графика показывает в виде пунктирной линии противодействующую силу, измеренную посредством тензометрического датчика, и отличающуюся от противодействующей силы в виде пунктирной линии «точка-тире», представляющую измерение изменений давления внутри одного из гидравлических силовых цилиндров, поддерживающих один из движущих приводов.
Фиг.8 представляет собой блок-схему, отображающую основные принципы рабочей программы, используемой системой управления по фиг.5.
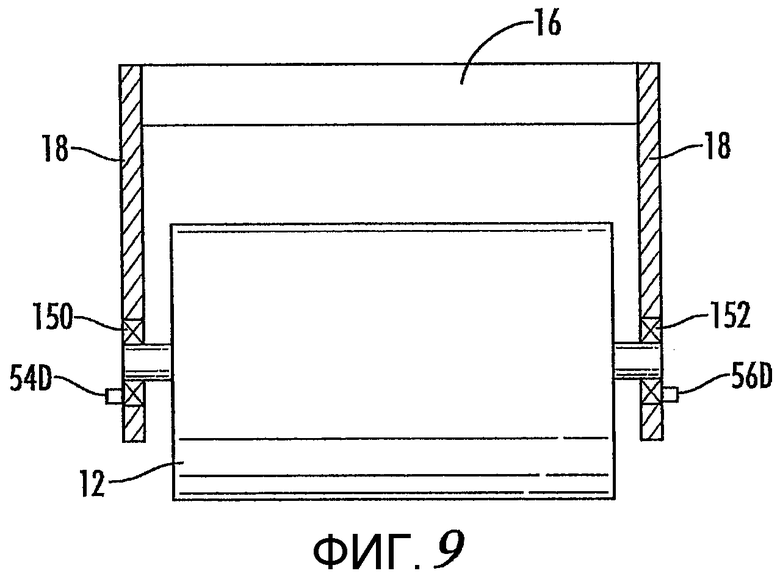
Фиг.9 представляет собой схематичную вертикальную проекцию фрезерного барабана с датчиком нагрузки на подшипник.
На фиг.1 показан вертикальный вид сбоку строительной машины, обозначенной в общем позицией 10. Строительная машина 10, проиллюстрированная на фиг.1, представляет собой фрезерную машину. Строительная машина 10 может также представлять собой машину для стабилизации грунта/рециклинга дорожного покрытия или другую строительную машину типа, включающего фрезерный барабан 12. Фрезерный барабан 12 схематично проиллюстрирован на фиг.2 во взаимодействии с поверхностью 14 грунта.
Строительная машина 10 по фиг.1 включает в себя раму 16 и корпус 18 фрезерного барабана, прикрепленный к раме 16. Фрезерный барабан 12 поддерживается с возможностью вращения внутри корпуса 18 фрезерного барабана.
Фрезерный барабан 12 по фиг.2 схематично показан работающим в режиме попутного фрезерования. В режиме попутного фрезерования строительная машина 10 движется вперед слева направо в направлении, обозначенном стрелкой 20 на фиг.1 и 2.
Фрезерный барабан 12 вращается по часовой стрелке, как показано стрелкой 22. Фрезерный барабан 12 имеет множество резцов 24, установленных на нем. Каждый из резцов 24 поочередно взаимодействует с поверхностью 14 грунта и вырезает в поверхности грунта направленный вниз дугообразный проход, такой как 26. На схематичной иллюстрации по фиг.2 резец 24А только что закончил нарезку дугообразного прохода 26А. Следующий резец 24В близок к взаимодействию с поверхностью грунта и будет нарезать следующий дугообразный проход 26В, который показан пунктирными линиями. Фиг.2 является всего лишь схематичной и, как будет понятно специалистам в данной области техники, барабан 12 на самом деле имеет огромное количество резцов, прикрепленных к нему по всей его ширине, и в любом поперечном сечении барабана только в направлении движения фактически будет присутствовать один или два резца. Однако по всей ширине барабана 12 в любой момент времени с землей может взаимодействовать целых тридцать резцов.
Следует отметить, что усилия, прикладываемые к поверхности 14 грунта ножевым барабаном 12, двигают строительную машину 10 вперед в том же направлении, в котором движется барабан строительной машины.
Со ссылкой на фиг.1 строительная машина 10 включает в себя множество взаимодействующих с землей опор, таких как 28 и 30. Взаимодействующие с землей опоры 28 и 30 иногда упоминаются, как ходовые механизмы, и могут представлять собой либо бесконечные гусеницы, как показано, либо они могут представлять собой колеса и шины. Строительная машина 10 может включать в себя одну или более передних взаимодействующих с землей опор 28 и одну или более задних взаимодействующих с землей опор 30. Как будет понятно специалистам в данной области техники, строительная машина 10, как правило, имеет три или четыре подобных взаимодействующих с землей опоры. Каждая взаимодействующая с землей опора, такая как 28 или 30, прикреплена к нижнему концу гидравлического силового цилиндра, такого как 32 или 34, для того чтобы поддерживать раму 16 со стороны земли 14 регулируемым образом. Силовые цилиндры 32 и 34 заключены в выдвижные корпуса 36 и 38, которые обеспечивают подъем рамы 16 с возможностью регулирования относительно поверхности 14 грунта.
Одна или более взаимодействующих с землей опор 28 и 30 будут иметь движущий привод, такой как 40 или 42, связанный с ними, для обеспечения движущей силы для продвижения строительной машины 10 по поверхности 14 грунта. Движущие приводы 40 и 42 могут представлять собой гидравлические приводы или электрические приводы или любой другой подходящий механизм движущего привода. Строительная машина 10 включает в себя кабину 44 или пульт управления оператора, в которой оператор-человек может сидеть в операторском кресле 46 или стоять для управления работой строительной машины 10 с пульта 48 управления.
В большинстве случаев строительные машины, включающие в себя фрезерный барабан, могут работать либо в режиме попутного фрезерования, который схематично проиллюстрирован на фиг.2, или в режиме встречного фрезерования, в котором фрезерный барабан вращается в противоположном направлении. Конечно, при работе в режиме встречного фрезерования, наклон режущих зубцов 24 должен быть обратным. Следует отметить, что понятие работы в режиме попутного фрезерования или в режиме встречного фрезерования относится к направлению вращения взаимодействующих с землей опор. Если барабан вращается в том же направлении, в котором вращаются взаимодействующие с землей опоры (колеса или гусеницы), машина задействована в режиме попутного фрезерования. Если барабан вращается в противоположном направлении, от направления взаимодействующих с землей опор, то машина задействована в режиме встречного фрезерования. Машина, такая как показана на фиг.1, которая работает в режиме попутного фрезерования при движении в направлении вперед, будет работать в режиме встречного фрезерования при движении в обратном направлении. Работа в режиме встречного фрезерования иногда в отрасли упоминается, как «встречное фрезерование», а работа в режиме попутного фрезерования иногда упоминается, как «попутное фрезерование».
Различные строительные машины могут использовать для различных рабочих ситуаций режим встречного фрезерования или режим попутного фрезерования. В одном типе строительных машин, известных как машина для стабилизации грунта/рециклинга дорожного покрытия, поверхность грунта фрезеруют, а измельченный материал немедленно распределяют, а затем повторно спрессовывают. В подобных машинах для стабилизации грунта/рециклинга дорожного покрытия предпочтительным является режим попутного фрезерования, потому что он имеет тенденцию к получению в результате более мелких частиц измельченного материала дорожного покрытия, чем получается при режиме встречного фрезерования.
Чтобы начать выполнение фрезеровочного цикла строительной машиной 10, работающей в режиме попутного фрезерования, который проиллюстрирован на фиг.2, строительную машину перемещают в необходимое начальное положение, при этом фрезерный барабан 12 удерживают в поднятом положении, над поверхностью 14 грунта. Для фрезерной машины подъем фрезерного барабана 12 относительно поверхности грунта, обычно, регулируют посредством выдвижения и втягивания гидравлических силовых цилиндров, таких как 32 и 34. Для машины для стабилизации грунта/рециклинга дорожного покрытия подъем фрезерного барабана 12 относительно поверхности грунта, обычно, регулируют посредством гидравлических силовых цилиндров, которые опускают барабан относительно рамы машины. Фрезерный барабан 12 вращается в направлении 22, как проиллюстрировано на фиг.2. Скорость вращения фрезерного барабана 12, как правило, является постоянной скоростью порядка приблизительно 100 об/мин, которая определяется рабочей скоростью первичного источника питания машины 10, обычно дизельного двигателя, и кинематической цепью, связывающей источник питания через муфту с фрезерным барабаном 12, обычно, устройством клинового приводного ремня и шкива, приводящим в действие зубчатый редуктор, заключенный внутри фрезерного барабана 12. Затем вращающийся фрезерный барабан опускают относительно поверхности 14 грунта до тех пор, пока резцы 24 не начнут резать поверхность 14 грунта. Вращающийся барабан продолжают медленно опускать до требуемой глубины фрезерования. Затем строительную машину 10 двигают вперед в направлении 20 за счет приложения движущей силы к приводам рабочего хода, таким как 40 и 42.
Глубину выреза, выполняемого фрезерным барабаном 12, как правило, регулируют с помощью системы регулирования профиля, которая отслеживает реперную линию, например направляющий трос или направляющую канавку на земле, и которая поддерживает необходимый подъем резания фрезерного барабана 12. Скорость продвижения машины 10 может регулироваться человеком-оператором, находящимся в кабине 44, и может включать установку заданного значения необходимой скорости продвижения в системе управления. Одной проблемой, с которой иногда сталкиваются при использовании строительной машины 10, работающей в режиме попутного фрезерования, который проиллюстрирован на фиг.2, является явление неконтролируемого крена вперед, при котором мощность, прикладываемая к фрезерному барабану 12, может стать причиной съезжания фрезерного барабана 12 за пределы выреза на поверхность 14 грунта, так что фрезерный барабан фактически ведет машину 10 вперед. Подобное явление крена вперед может произойти вследствие того, что скорость поверхности фрезерного барабана в несколько раз больше скорости колес или гусениц, которые приводят в движение машину.
Работа фрезерного барабана 12 может быть описана в виде функции противодействующей силы, прикладываемой поверхностью 14 грунта к фрезерному барабану 12. Можно считать, что противодействующая сила имеет вертикальную составляющую и горизонтальную составляющую. Вертикальная составляющая противодействующей силы возникает, главным образом, благодаря той части общей массы строительной машины 10, которая поддерживается за счет взаимодействия фрезерного барабана 12 с поверхностью 14 грунта. Горизонтальная составляющая противодействующей силы возникает, главным образом, благодаря движущему приводу, продвигающему барабан вперед в грунт. Некоторые варианты осуществления изобретения, описанные в данной заявке, рассматривают главным образом вертикальную составляющую противодействующей силы, но изобретение не ограничено исключительно вертикальной составляющей. Перед взаимодействием фрезерного барабана 12 с поверхностью 14 грунта, когда фрезерный барабан 12 удерживают над поверхностью 14 грунта, противодействующая сила равна нулю. Вся масса строительной машины 10 опирается на различные взаимодействующие с землей опоры, такие как 28 и 30. По мере опускания фрезерного барабана 12 во взаимодействие с поверхностью 14 грунта некоторая часть данной массы строительной машины 10 фактически переходит на фрезерный барабан 12, и, таким образом, вертикальная нагрузка, приходящаяся на различные взаимодействующие с землей опоры, такие как 28 и 30, уменьшается за счет величины данной нагрузки, переходящей на фрезерный барабан 12. Если бы гидравлические силовые цилиндры 32 и 34 были втянуты в положение, когда взаимодействующие с землей опоры 28 и 30 были полностью подняты над землей, а вся машина опиралась на фрезерный барабан 12, тогда вертикальная составляющая противодействующей силы равнялась бы 100% массы строительной машины. Таким образом, в процессе работы машины 10 с фрезерным барабаном 12, находящимся во взаимодействии с поверхностью 14 грунта, вертикальная составляющая противодействующей силы будет находиться где-то между нулем и 100% массы строительной машины. В данную противодействующую силу вносит вклад множество факторов. Среди прочего данные вносящие вклад факторы включают:
1. Состояние резцов 24, т.е. являются ли они новыми или изношенными;
2. Твердость материала поверхности 14 грунта, подлежащей фрезерованию;
3. Скорость продвижения, с которой машина 10 продвигается вперед в направлении 20; и
4. Глубина 50 фрезерования, на которую фрезерный барабан врезается в поверхность 14 грунта.
Еще одним фактором, который начинает действовать, когда фрезерный барабан 12 сначала опускают во взаимодействие с поверхностью 14 грунта, является скорость опускания, с которой вращающийся фрезерный барабан 12 опускают в поверхность 14 грунта. Данные различные факторы оказывают воздействие на противодействующую силу, и ниже изложена вероятность неожиданных явлений «крена вперед» или «крена назад».
Что касается состояния резцов 24, если резцы являются новыми и острыми, противодействующая сила является низкой, а по мере износа резцов противодействующая сила увеличивается.
Что касается твердости материала поверхности 14 грунта, то чем тверже материал, тем выше противодействующая фрезерному барабану 12 сила. Если машина 10 неожиданно сталкивается с материалом дорожного покрытия повышенной прочности, то машина может неожиданно накрениться вперед.
Что касается скорости продвижения, то более высокие скорости продвижения являются причиной более высоких противодействующих фрезерному барабану 12 сил. Кроме того, чем ближе скорость продвижения к окружной скорости на периферии резцов 24, тем выше риск явления крена вперед.
Что касается глубины фрезерования, то следствием более больших глубин фрезерования являются более высокие противодействующие силы. Но вклад глубины фрезерования в противодействующую силу фактически является противоположным влиянию на вероятность явлений крена вперед. Несмотря на то что противодействующие силы увеличиваются при более больших глубинах фрезерования, для увеличенных глубин фрезерования, для того чтобы произошло явление крена вперед, фрезерный барабан должен выбраться из глубины выреза. Для глубоких вырезов фрезерному барабану более тяжело выбраться из выреза, и, таким образом, следствием более глубоких вырезов является меньшая вероятность явления крена вперед.
Машина 10 включает в себя адаптивную систему 52 регулирования движущего привода, схематично проиллюстрированную на фиг.5, которая отслеживает данную противодействующую силу, действующую на фрезерный барабан 12, и оказывает содействие в предотвращении явлений крена вперед посредством регулирования одного или более факторов, вносящих вклад в противодействующую силу.
В процессе нормальной работы строительной машины 10 наиболее легко регулируемым фактором, описанным выше, является скорость продвижения, и, таким образом, в одном варианте осуществления адаптивной системы 52 регулирования движущего привода, в ответ на измеренную противодействующую фрезерному барабану 12 силу, регулируют движущую силу, передаваемую на движущие приводы 40 и 42.
В еще одном варианте осуществления, когда вращающийся фрезерный барабан 12 сначала опускают во взаимодействие с поверхностью 14 грунта, противодействующую силу можно регулировать посредством регулирования скорости опускания фрезерного барабана 12 в поверхность грунта.
Система 52 регулирования включает в себя по меньшей мере один датчик 54, а предпочтительно пару датчиков 54 и 56, выполненных с возможностью определения параметра, соответствующего противодействующей силе со стороны поверхности 14 грунта, действующей на фрезерный барабан 12. В варианте осуществления, проиллюстрированном на фиг.3 и 4, датчики 54 и 56 представляют собой тензометрические датчики, установленные на противоположных боковых стенках корпуса 18 фрезерного барабана. На фиг.3 и 4 первый тензометрический датчик 54 показан установленным в канавку 58, образованную в боковой стенке корпуса 18 фрезерного барабана. Электрические провода 60 связывают тензометрический датчик 54 с контроллером 62. Закрывающая пластина (не показана) обычно закрывает канавку 58 для защиты тензометрического датчика 54 и связанной с ним электропроводки 60 в процессе работы.
Как лучше видно на фиг.3 и 4, тензометрический датчик 54 предпочтительно имеет продольную ось 64, которая ориентирована по существу вертикально, так что она будет по существу перпендикулярна поверхности 14 грунта, и предпочтительно расположена непосредственно над и по существу пересекает ось 66 вращения фрезерного барабана 12.
Следует отметить, что отсутствует необходимость в ориентации тензометрического датчика 54 строго вертикально, и отсутствует необходимость в расположении тензометрического датчика 54 непосредственно над осью 66 вращения и наличии своей оси 64, пересекающей ее. Вообще говоря, тензометрический датчик 54 должен быть ориентирован таким образом, чтобы по меньшей мере главная часть силы, измеряемой тензометрическим датчиком, была ориентирована по существу перпендикулярно поверхности 14 грунта.
Вследствие того, что нагрузка противодействующей силы на работающий барабан 12 может быть неравномерной по всей его ширине, предпочтительно иметь два тензометрических датчика 54 и 56, установленных на противоположных сторонах корпуса 18 фрезерного барабана рядом с противоположными концами фрезерного барабана 12, так чтобы совмещенные измерения тензометрических датчиков 54 и 56 представляли всю противодействующую силу, действующую на фрезерный барабан 12. Что касается фиг.2, то следует понимать, что фактически имеется большое количество режущих зубцов 24, в любой момент времени взаимодействующих с поверхностью 14 грунта. Датчики противодействующей силы согласно настоящему изобретению предпочтительно реагируют на вертикальную составляющую суммы всех противодействующих сил, действующих на все зубцы, которые взаимодействуют с поверхностью грунта в любой момент времени. Одним подходящим тензометрическим датчиком, который может быть использован для датчиков 54 и 56, является Model DA 120, поставляемая ME-Meβsysteme GmbH Hennigsdorf, Germany.
Контроллер 62 принимает сигналы от датчиков 54 и 56 посредством электрических проводов, таких как 60. Контроллер 62 содержит компьютер или другое программируемое устройство с подходящими устройствами ввода и устройствами вывода, и соответствующим программным обеспечением, включая рабочую программу, которая определяет изменение в измеряемом параметре, соответствующем увеличению противодействующей силы, и в ответ на данное изменение отправляет управляющие сигналы посредством линий связи 68 и 70 одному или более исполнительным механизмам 72 и 74 для регулирования движущей силы, предоставляемой движущему приводу, такому как 40 и 42. Исполнительные механизмы 72 и 74 могут, например, представлять собой электронно-управляемые клапаны, которые регулируют поток гидравлической жидкости в гидравлические приводы 40 и 42 для регулирования скорости продвижения машины 10.
Если контроллер 62 регулирует скорость, с которой фрезерный барабан 12 опускается в грунт, исполнительные механизмы 72 и 74 могут представлять собой электронно-управляемые клапаны, которые регулируют поток гидравлической жидкости в гидравлические силовые цилиндры 32, 34, которые поднимают и опускают раму с барабаном относительно земли.
Фиг.6 представляет собой графическое изображение отношения между скоростью продвижения и противодействующей силой, которое реализуется посредством варианта осуществления рабочей программы контроллера 62. В варианте осуществления, проиллюстрированном на фиг.6, измеренная противодействующая сила в виде процентного отношения общей массы машины 10 отображена на горизонтальной оси и продолжается от 0% до 100%. Противодействующая сила, равная 0%, отображает ситуацию, когда фрезерный барабан 12 полностью поднят над поверхностью 14 грунта. Противодействующая сила, равная 100%, представляет ситуацию, когда полная масса машины 10 опирается на фрезерный барабан 12 и никакая часть этой массы не приходится на взаимодействующие с землей опоры, например, 28 и 30. Вертикальная шкала с левой стороны на фиг.6 отображает скорость продвижения машины 10 в метрах в минуту. Пунктирная линия 71 отображает регулируемую скорость продвижения машины 10, при регулировании с помощью варианта осуществления рабочей программы системы 62 управления. Сплошная линия 73 отображает заданное значение скорости продвижения, выбранное оператором. В показанном примере заданное значение составляет 20,0 м/мин.
На фиг.6 рабочий диапазон 75 ограничен между нижней границей 77 и верхней границей 79 по горизонтальной оси. В проиллюстрированном варианте осуществления нижняя граница 77 составляет приблизительно 70%, а верхняя граница 79 составляет приблизительно 90% общей массы машины. Когда противодействующая сила меньше, чем нижняя граница рабочего диапазона, скорость продвижения машины 10, которая отображена посредством горизонтальной части 71А пунктирной линии, приблизительно равна заданному значению скорости рабочего хода, выбранному оператором машины. Заданное значение очень похоже на автоматизированное регулирование скорости, наподобие устройства автоматического поддержания скорости в автомобиле, с помощью которого оператор может выбирать и обеспечивать поддержание требуемой постоянной скорости с помощью системы управления.
Однако рабочая программа, представленная на фиг.6, выполнена с возможностью уменьшения скорости продвижения, как только противодействующая сила превысит нижнюю границу 77 рабочего диапазона.
Наклонный участок 71В пунктирной линии отображает необходимое уменьшение скорости продвижения машины 10, которое регулирует рабочая программа системы 62 управления. Линия 71В представляет линейное уменьшение. В других вариантах осуществления может быть использовано нелинейное уменьшение. По мере продолжения увеличения измеряемой противодействующей силы на протяжении рабочего диапазона 75 от приблизительно 70% до приблизительно 90% скорость продвижения линейно уменьшается от заданного значения скорости, представленного участком 71А горизонтальной линии, до нуля. Таким образом, например, если измеренная противодействующая сила составляет 80%, как обозначено на горизонтальной оси, скорость продвижения уменьшается приблизительно до половины заданного значения скорости. Когда измеренная противодействующая сила равна приблизительно 90%, скорость продвижения уменьшается до нуля. При противодействующих силах выше верхней границы, составляющих приблизительно 90%, скорость продвижения сохраняется на нуле.
В некоторых случаях, когда противодействующая сила повышается до избыточного уровня около или выше верхней границы 79 рабочего диапазона 75, как видно на фиг.6, может случиться, что даже, когда расходуемая на движение мощность, прикладываемая к движущим приводам 40 и 42, уменьшается до нуля, силы движения вперед, прикладываемые к поверхности 14 грунта вращающимся фрезерным барабаном 12, могут все еще продолжать толкать машину вперед. В таких случаях, контроллер 62 может посылать дополнительный управляющий сигал по линии 76 управления в тормозную систему 78, связанную с одной или более взаимодействующих с землей опор 28 и 30. Контроллер 62 будет направлять тормозную систему 78 для приложения усилия торможения на взаимодействующие с землей опоры для дополнительного содействия замедлению скорости продвижения машины 10.
В варианте осуществления по фиг.6 рабочий диапазон 75 проиллюстрирован, например, в виде продолжения от нижней границы 75, составляющей приблизительно 70%, до верхней границы 79, составляющей приблизительно 90%. Следует отметить, что диапазон, составляющий от 70% до 90%, является всего лишь одним примером подходящего рабочего диапазона, и не должен считаться ограничением. Вообще говоря, предпочтительный рабочий диапазон может быть описан, как имеющий нижнюю границу, составляющую по меньшей мере 50% массы строительной машины, и верхнюю границу, составляющую меньше чем 95% массы строительной машины.
Следует понимать, что пунктирная линия 71 на фиг.6 отображает режим работы системы 62 управления и целевую скорость продвижения, которую она пытается сообщить машине 10. Пунктирная линия на фиг.6 не отображает реальную скорость продвижения машины 10, которая будет значительно более непостоянной.
Система 52 управления и рабочая программа контроллера 62 предпочтительно выполнены так, что при нормальной работе машины 10 противодействующая сила, действующая на фрезерный барабан 12, будет поддерживаться приблизительно на нижней границе 77 рабочего диапазона 75, такого как диапазон, проиллюстрированный на фиг.6. Это означает, что машина 10 работает с относительно высокой мощностью выхода, около своей максимальной выходной мощности, но все-таки находится под контролем. Если машина 10 равномерно работала ниже нижней границы 77 рабочего диапазона 75, так что ее скорость рабочего хода оставалась постоянно ниже ее заданного значения, машина 10 проделает меньшую работу, чем она в состоянии сделать. С другой стороны, если машина 10 продвигалась настолько быстро, что противодействующая сила часто превышала нижнюю границу 77 рабочего диапазона 75, будет повышенная вероятность явления крена вперед.
Также следует отметить, что, как и с любой системой управления, заданное значение не может поддерживаться точно и должно сохраняться в пределах приемлемого диапазона (который может называться зона нечувствительности) вокруг заданного значения. Например, в варианте осуществления, где система управления пытается сохранять противодействующую силу приблизительно на нижней границе 77 диапазона, и если зону нечувствительности устанавливают плюс или минус 2%, расходуемая на движение мощность не будет уменьшаться до тех пор, пока скорость продвижения не достигнет 72%, а затем расходуемая на движение мощность не будет увеличиваться до тех пор, пока скорость продвижения не упадет ниже 68%. В идеале противодействующая сила будет сохраняться в пределах этой зоны нечувствительности вокруг требуемых 70% эксплуатационного режима. Более высокие значения противодействующей силы сверх зоны нечувствительности достигаются, только если свойства поверхности грунта изменятся в сторону более твердой поверхности, что может стать причиной продолжения повышения противодействующей силы, несмотря на понижение движущей силы для движущего привода. Цель варианта осуществления системы управления состоит в том, чтобы более высокая граница 79 диапазона регулирования никогда не была достигнута.
Также следует отметить, что линейное соотношение между скоростью продвижения и противодействующей силой, установленное контроллером 62, как отображено линией 71В на фиг.6, является только одним примером программы управления. Также может быть использовано нелинейное соотношение управления прогрессивного типа.
Фиг.8 представляет собой блок-схему, отображающую основные принципы логики, используемой в базовой рабочей программе, выполняемой контроллером 62. Противодействующая сила, действующая на барабан 12, будет отслеживаться на постоянной основе, как обозначено в блоке 110. Для осуществления необходимого регулирования скорости, которая показана пунктирной линией 71 на фиг.6, программа будет запрашивать, находится ли эта сила ниже нижней границы 77 диапазона в блоке 112, или выше верхней границы 79 диапазона в блоке 114. Если противодействующая сила находится в пределах диапазона 75, регулируется расходуемая на движение мощность для опор 28 и 30 с целью регулирования скорости продвижения посредством линейного соотношения между противодействующей силой и скоростью продвижения, показанной наклонной линией 71В на фиг.6, как указано в блоке 116. Если противодействующая сила ниже нижней границы 77, скорость продвижения сохраняется на или около заданного значения скорости, как указано в блоке 118. Если противодействующая сила выше верхней границы 79, для дополнительного снижения скорости продвижения, может быть применен тормоз, как указано в блоке 120.
На фиг.7 показаны графические данные, представляющие реальные испытания машины 10, причем машина работает со скоростью продвижения так, чтобы установленная противодействующая сила постоянно находилась в пределах рабочего диапазона 75. Горизонтальная ось представляет хронологическое время на протяжении испытания, которое показано вдоль нижней части на фиг.7. Сплошная линия 80 в верхней части фиг.7 представляет заданное значение скорости продвижения, которое в данном примере составляет приблизительно 17 м/мин. Пунктирная линия 82 представляет измеренную скорость продвижения машины на протяжении временного интервала, представленного на горизонтальной оси в нижней части фиг.7.
В нижней части фиг.7 пунктирная линия 84 представляет измеренную противодействующую силу, определяемую за счет суммарного действия двух тензометрических датчиков 54 и 56. Следует отметить, что шкала для противодействующей силы, показанная с левой стороны нижней части фиг.7, перевернута, поэтому направленная вниз наклонная линия слева направо на самом деле отображает увеличение измеренной противодействующей силы, а направленная вверх наклонная пунктирная линия слева направо на самом деле отображает уменьшение измеренной противодействующей силы. Как можно понять за счет сравнения общей формы пунктирной линии 84, отображающей измеренную противодействующую силу, со штриховой линией 82, отображающей измеренную скорость продвижения, по мере увеличения измеренной противодействующей силы измеренная скорость продвижения уменьшается. Это происходит потому, что система 62 управления работает в соответствии с рабочей программой, представленной на фиг.6, для того чтобы придать уменьшение скорости продвижения машине 10, когда определяются повышенные уровни противодействующей силы.
Как видно из пунктирной линии 84, на протяжении временного интервала испытания измеренная противодействующая сила оставалась в пределах рабочего диапазона от 70 до 90% и, таким образом, на протяжении всего испытания, проиллюстрированного на фиг.7, система 62 управления была задействована с возможностью использования различных уменьшений движущей силы, направленной на движущие приводы 40 и 42, обеспечивая за счет этого возможность работы машины 10 с высокой эффективностью, в то же время еще и предотвращая явления крена вперед.
Один подход предшествующего уровня техники с целью ослабления регулирования, которое представлено в патентах США №№ 4,929,121 на имя Lent и др. и 5,318,378 на имя Lent, работает посредством измерения давления в одной или более гидравлических стоек, которые поддерживают раму со стороны взаимодействующих с землей опор.
В процессе испытания, представленного на фиг.7, два задних гидравлических опорных силовых цилиндра 34 испытательной машины установили в качестве обособленно действующих силовых цилиндров, и поддерживающие давления внутри данных силовых цилиндров измерили и совместно представили посредством линии 86 из точек-тире на Фиг.7. Шкала для измерений давления в барах линии 86 показана с нижней правой стороны на фиг.7. При сравнении измеренной противодействующей силы с использованием настоящей системы, которая представлена пунктирной линией 84, с измеренным гидравлическим давлением в силовых цилиндрах 34, представленным линией 86 из точек-тире, легко понять две вещи.
Во-первых, измерения гидравлического давления представляют собой значительно худший показатель кратковременных изменений противодействующей силы. Измерения давления имеют тенденцию сглаживать измерение изменений нагрузки, и они просто не показывают быстрые кратковременные изменения. Например, следуя от момента времени приблизительно 16:36:10 до 16:37:40 видно, что пунктирная линия 84 в целом стремится вниз с многочисленными случаями движений вверх и вниз очень короткой продолжительности на протяжении временного интервала. С другой стороны, линия 86 из точек-тире также имеет тренд, направленный вниз, но кратковременные явления полностью уничтожены. Например, пик, как тот, что показан в точке 88 на линии 84, относительно короткой продолжительности, составляющей приблизительно 5 секунд, совсем не имеет очевидного действия на линии 86 из точек-тире. Таким образом, видно, что система 62 управления согласно настоящему изобретению может реагировать значительно более быстро и с явлениями значительно более короткой продолжительности, чем может система, работающая на основании измеренного давления в гидравлических стойках.
Во-вторых, ответ при измерениях гидравлического давления, представленных линей 86 из точек-тире, сдвинут во времени. Таким образом, даже изменения противодействующей силы, которые имеют достаточно длительную продолжительность, чтобы быть отраженными в показателях измеряемого давления линии 86, не регистрируются на протяжении существенного времени после того, как событие реально произошло. Например, рассматривая правую сторону фиг.7, происходит существенное относительно быстрое увеличение противодействующей силы, показанной линией 84, между моментами времени 16:39:40 и 16:40:00, следствием которого является пик 90, достигаемый приблизительно в момент времени 16:39:55. Кроме того, измерения давлений, представленных линией 86 из точек-тире, не достигают такого же уровня до момента времени приблизительно 16:40:10, как отображено в точке 92. Таким образом, имеется временная задержка, составляющая от 10 до 15 секунд, между пиком противодействующей силы, который измерен с помощью настоящей системы, показанным на линии 84, и более поздним пиком противодействующей силы, который измерен в качестве изменения гидравлического давления в гидравлических силовых цилиндрах, как показано линией 86.
Аналогичную временную задержку можно видеть при сравнении участка пунктирной линии 84 между моментом времени 16:38:15 с началом приблизительно в точке 94 и 16:38:55 с окончанием приблизительно в точке 96. Глядя на линию 86 из точек-тире на тот же самый временной интервал, видно, что она также имеет тренд в том же самом направлении, но она не достигает своей наиболее низкой точки 98 до момента времени приблизительно 16:39:10, который снова демонстрирует приблизительно 15 секундную задержку времени ответа.
Таким образом, очевидно, что система согласно настоящему изобретению значительно более чувствительна к измерению краткосрочных изменений противодействующей силы, чем система, основанная на измерении гидравлического давления в опорных силовых цилиндрах. Также система согласно настоящему изобретению реагирует более быстро на все изменения противодействующей силы. Это позволяет системе согласно настоящему изобретению более быстро реагировать и практически предотвращать явления крена вперед, тогда как системы наподобие систем предшествующего уровня техники могут обнаруживать явления только после того, как они уже произошли.
Есть основания полагать, что существует несколько причин, почему система согласно настоящему изобретению реагирует более быстро на изменения противодействующей силы, чем система, основанная на измерении давления в гидравлических силовых цилиндрах, поддерживающих раму.
Первой причиной является механическая инерция. Для системы, которая измеряет изменения гидравлического давления в силовых цилиндрах, поддерживающих раму, по существу вся строительная машина 10 должна двигаться для того, чтобы оказать воздействие на давление в силовых цилиндрах. В противоположность этому, датчики, наподобие датчиков 54 и 56, измеряют изменения усилия, прилагаемого фрезерным барабаном 12 непосредственно на корпус 18 фрезерного барабана, и, таким образом, отсутствует необходимость в его передаче через раму для реального подъема машины 10. Таким образом, существует необходимость в реакции только фрезерного барабана внутри корпуса машины, а не в реакции машины 10 целиком, который предоставляет значительно меньшую механическую инерцию для физического перемещения, необходимого, чтобы вызвать реакцию датчиков.
Во-вторых, вследствие трения силовых цилиндров 32 и 34 и выдвижных корпусов 36 и 38, имеется существенный коэффициент демпфирования. В отношении данного коэффициента демпфирования необходимо также учитывать концепцию прерывистого трения против плавного трения. Как известно, требуется большее усилие, чтобы первоначально преодолеть трение в силовых цилиндрах 32 и 34 и цилиндрических корпусах 36 и 38, чем требуется для продолжения движения, необходимого для отражения увеличения изменений давления. Таким образом, относительно небольшие изменения противодействующей силы могут быть недостаточными для преодоления прерывистого трения, представляемого силовыми цилиндрами и их цилиндрическими корпусами, и, таким образом, данные относительно небольшие изменения никогда не будут видны при измерениях давлений в силовых цилиндрах.
Третьим фактором является физическая деформация силовых цилиндров 32 и 34 и их цилиндрических корпусов 36 и 38, которая возникает, когда к машине 10 прикладывают тяжелые рабочие нагрузки. Необходимо помнить, что настоящая система выполнена с возможностью функционирования с противодействующей силой относительно высокого уровня в диапазоне, таком как, например, от 70 до 90% общей массы машины 10. Это происходит, когда машина 10 продвигается вперед приблизительно со своим максимальным потенциалом. Благодаря конфигурации машины 10 и вертикальных опорных силовых цилиндров 32 и 34, необходимо учитывать, что, когда машина 10 продвигается вперед при тяжелых нагрузках, будет происходить физическое изгибание цилиндрических корпусов 36 и 38, которое будет существенно увеличивать трение, имеющееся в данных составных элементах, и дополнительно уменьшать их способность точно и быстро отражать изменения противодействующей силы в виде изменяющихся давлений в силовых цилиндрах, и свободный ход между силовыми цилиндрами и их корпусами.
Еще одна трудность с использованием измерений давления в гидравлических силовых цилиндрах для определения изменений противодействующей силы, нагружающей фрезерный барабан, состоит в том, что подобные измерения давления могут быть надежно произведены только из действующего отдельно гидравлического силового цилиндра. Однако со строительными машинами, типа строительной машины 10, как правило, необходимо, чтобы по меньшей мере передние и задние силовые цилиндры представляли собой парно действующие силовые цилиндры для обеспечения правильного регулирования положения машины 10 на поверхности 14 грунта. Таким образом, данные давления от гидравлических силовых цилиндров будут, как правило, поступать только от передних и задних силовых цилиндров. В результате того, что изменения противодействующей силы не могут одинаково отражаться в передней и задней частях машины, система, основанная на измерении изменений давления в опорных силовых цилиндрах только спереди или сзади, будет менее точной, чем система, которая измеряет противодействующую силу в положении рядом с самим фрезерным барабаном 12. Таким образом, система согласно настоящему изобретению, имеющая датчики 54 и 56 в целом непосредственно над и на противоположных сторонах фрезерного барабана 12, может реагировать на изменение всей нагрузки на фрезерный барабан, тогда как система, основанная на измерении изменений давления либо в переднем, либо в заднем опорном цилиндре, может не увидеть все изменение, которое происходит во фрезерном барабане.
Несмотря на то что в варианте осуществления, описанном выше, каждый из датчиков 54 и 56 представляет собой тензометрический датчик, такой как проиллюстрирован на фиг.3 и 4, каждый из датчиков 54 или 56 может в качестве альтернативы представлять собой динамометрический датчик.
Динамометрический датчик представляет собой электронное устройство, т.е. преобразователь, который используется для преобразования усилия в электрический сигнал. Данное преобразование является непрямым и происходит в два этапа. Для механической конфигурации измеряемое усилие, как правило, деформирует один или более тензометрических датчиков. Тензометрический датчик трансформирует деформацию, т.е. натяжение, в электрические сигналы. Динамометрический датчик, обычно, включает в себя четыре тензометрических датчика, как, например, в конфигурации моста Уитстона. Также подходят динамометрические датчики из одного или двух тензометрических датчиков. Выходной электрический сигнал обычно составляет порядка нескольких милливольт и часто требует усиления посредством измерительного усилителя перед тем, как его можно использовать. Выходной сигнал преобразователя встраивают в алгоритм для вычисления усилия, требуемого для динамометрического датчика.
Несмотря на то что динамометрические датчики тензометрического типа являются наиболее распространенными, также имеются другие типы динамометрических датчиков, которые могут быть использованы. В некоторых промышленных вариантах использования применяются гидравлические или гидростатические динамометрические датчики, причем они могут быть использованы для устранения некоторых проблем, имеющихся у динамометрических датчиков, основанных на тензометрических датчиках. В качестве примера, гидравлический динамометрический датчик является невосприимчивым к переходным напряжениям, таким как молния, и может быть более эффективным в некоторых условиях окружающей среды.
Некоторые другие типы динамометрических датчиков включают пьезоэлектрические динамометрические датчики и струнные динамометрические датчики.
В еще одном альтернативном варианте осуществления датчики, типа датчиков 54 и 56, могут быть расположены на раме 16, а не на корпусе 18 фрезерного барабана. Положение подобного датчика 54А схематично показано на фиг.1. Подобные датчики должны быть предпочтительно выполнены таким же образом, как датчики 54 и 56, описанные выше, и предпочтительно должны быть расположены непосредственно над фрезерным барабаном 12 и ориентированы способом, аналогичным тому, который выше описан для датчиков 54 и 56.
Во второй альтернативе датчики тензометрического типа, такие как 54В' и/или 54B”, могут быть расположены на раме 16 и могут быть ориентированы таким образом, чтобы измерять изгиб рамы 16. Таким образом, на фиг.1 первый датчик 54В' показан с расположением на раме 16 в положении между фрезерным барабаном и передней опорой 28, а второй датчик 54В” показан с расположением на раме 16 между фрезерным барабаном и задней опорой 30. Датчики 54В' и 54В” могут представлять собой датчики типа струнных тензометрических датчиков, подобных датчикам, описанным выше для датчиков 54 и 56. В данном примере датчики могут быть ориентированы в продольном направлении по существу параллельно поверхности 14 грунта для того, чтобы иметь большую возможность реагировать на изгибающие напряжения, имеющиеся в раме 16. Кроме того, следует понимать, что датчики 54В' и 54В” могут быть ориентированы любым требуемым образом и отсутствует необходимость в их параллельности поверхности 14 грунта. Кроме того, датчики 54В' и 54B” могут содержать множество тензометрических датчиков, таких как в измерительном мосту, или любой другой необходимой конфигурации. Кроме того, предпочтительными будут один или более дополнительных датчиков на противоположной стороне рамы 16, так чтобы датчики предпочтительно были расположены с аналогичными компоновками на противоположных сторонах машины 10 для того, чтобы полностью отражать изменения нагрузки по всей ширине фрезерного барабана 12.
Один дополнительный альтернативный способ определения изменений противодействующей силы состоит в том, чтобы использовать датчики 54 и 56, представляющие собой датчики нагрузки на подшипник. Например, как схематично проиллюстрировано на фиг.9, фрезерный барабан 12 обычным образом установлен внутри корпуса 18 фрезерного барабана внутри первого и второго подшипников 150 и 152, расположенных около противоположных концов фрезерного барабана 12.
Подшипники 150 и 152 могут включать в себя интегральные датчики общей нагрузки, такие как 54D и 56D, схематично проиллюстрированные на фиг.9. Для датчиков общей нагрузки в подшипниках известно несколько конструкций, таких как, например, показаны в патенте США 6,170,341; патенте США 6,338,281; патенте США 6,407,475; и заявке на патент США 2008/0199117.
Кроме того, несмотря на то что система предупреждения разработана для предотвращения явлений крена вперед, необходимо учитывать, что в некоторых экстремальных ситуациях система управления может не быть абсолютно успешной в предотвращении подобных явлений, и фактически явление крена вперед может произойти. Таким образом, может быть полезно обеспечить резервную систему, такую как датчик давления, измеряющий гидравлическое давление внутри одного или более опорных силовых цилиндров 32 или 34, которые были выполнены с возможностью работы в режиме обособленного действия, так что опорное давление является показателем нагрузки, которую несет данный опорный силовой цилиндр.
Таким образом, датчик 100 давления, который схематично проиллюстрирован на фиг.5, может быть расположен на силовом цилиндре, таком как силовой цилиндр 34, для измерения давлений внутри данного силового цилиндра. Можно, например, ожидать, что давления внутри силового цилиндра 34 будут выглядеть, как перевернутая линия 86 из точек-тире на фиг.7. Таким образом, если определяется, что уменьшение давления внутри силового цилиндра 34, которое измеряется датчиком 100, происходит ниже некоторого заданного уровня, система 62 управления может обеспечить выполнение дополнительных программ безопасности до полного прекращения подачи энергии к фрезерному барабану 12, например, посредством приведения в действие муфты 102 в системе привода фрезерного барабана 12.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЛОКИРОВКИ ФРЕЗЕРНОГО БАРАБАНА ДОРОЖНОЙ ФРЕЗЕРНОЙ МАШИНЫ | 2018 |
|
RU2695210C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛАЗЕРНОЙ ОБРАБОТКОЙ СКАЛЬНОЙ ПОРОДЫ ПЕРЕМЕННОЙ КРЕПОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2528187C1 |
| САМОХОДНАЯ ФРЕЗЕРНАЯ МАШИНА, А ТАКЖЕ СПОСОБ ВЫГРУЗКИ СФРЕЗЕРОВАННОГО МАТЕРИАЛА | 2015 |
|
RU2631747C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФРЕЗЕРУЕМОГО ОБЪЕМА ИЛИ ФРЕЗЕРУЕМОЙ ПЛОЩАДИ ФРЕЗЕРУЕМОЙ ПОВЕРХНОСТИ И СТРОИТЕЛЬНАЯ МАШИНА | 2013 |
|
RU2546690C1 |
| СИСТЕМА ДЛЯ ВЫЕМКИ ГРУНТА ИЗ-ПОД ЗАГЛУБЛЕННОЙ ТРУБЫ | 2003 |
|
RU2327839C2 |
| САМОХОДНАЯ ФРЕЗЕРНАЯ МАШИНА, А ТАКЖЕ СПОСОБ ОТВОДА СФРЕЗЕРОВАННОГО МАТЕРИАЛА | 2015 |
|
RU2620675C2 |
| МУЛЬЧИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СТЕРНИ, СТОЯЩЕЙ НА ПОЛЕ, С РЕГУЛИРУЕМЫМ ПОЛОЖЕНИЕМ И/ИЛИ СИЛОЙ ПРИЖАТИЯ К ГРУНТУ | 2018 |
|
RU2758615C2 |
| СИСТЕМА ДЛЯ ЗЕМЛЕРОЙНЫХ РАБОТ ПОД ЗАГЛУБЛЕННЫМИ ТРУБАМИ | 2002 |
|
RU2309224C2 |
| СИСТЕМА ДЛЯ ЗЕМЛЕРОЙНЫХ РАБОТ ПОД ЗАГЛУБЛЕННЫМИ ТРУБАМИ | 2002 |
|
RU2309223C2 |
| КОВШ СКРЕПЕРА | 1996 |
|
RU2114252C1 |






Изобретение относится к системам регулирования привода для строительных машин, включающих фрезерный барабан, например, таких как фрезерные машины, проходческие комбайны для открытых работ или машины для стабилизации грунта/рециклинга дорожного покрытия. Адаптивная система продвижения строительной машины измеряет противодействующие силы, прикладываемые поверхностью грунта к фрезерному барабану, и в ответ на измеренные изменения данных противодействующих сил регулирует движущую силу, подаваемую к движущему приводу машины, или замедляет скорость опускания вращающегося фрезерного барабана. Раннее и быстрое определение подобных изменений противодействующих сил позволяет системе управления содействовать предотвращению явлений крена вперед или назад, соответственно, строительной машины. 4 н. и 17 з.п. ф-лы, 9 ил.
1. Способ управления строительной машиной (10), имеющей раму (16),
фрезерный барабан (12), поддерживаемый рамой (16), для фрезерования поверхности (14) грунта,
множество взаимодействующих с землей опор (28, 30), взаимодействующих с поверхностью (14) грунта и поддерживающих раму (16), и
движущий привод (40, 42), связанный по меньшей мере с одной из взаимодействующих с землей опор (28, 30) для обеспечения движущей силы по меньшей мере одной взаимодействующей с землей опоре (28, 30), при этом способ включает следующие этапы, на которых:
(a) приводят в действие фрезерный барабан (12) в режиме попутного фрезерования;
(b) подают движущую силу к движущему приводу (40, 42) и перемещают строительную машину (10) вперед со скоростью продвижения;
(c) измеряют параметр, соответствующий противодействующей силе, действующей на фрезерный барабан (12);
(d) определяют изменение измеряемого параметра, соответствующее увеличению противодействующей силы; и
(e) в ответ на определение изменения на этапе (d) и при продолжении приведения в действия фрезерного барабана (12) в режиме попутного фрезерования, уменьшают движущую силу, передаваемую на движущий привод (40, 42), для уменьшения скорости продвижения и, тем самым, уменьшают противодействующую силу и предотвращают явление крена вперед.
2. Способ управления строительной машиной, имеющей раму (16),
фрезерный барабан (12), поддерживаемый рамой (16), для фрезерования поверхности (14) грунта и
множество взаимодействующих с землей опор (28, 30), взаимодействующих с поверхностью (14) грунта и поддерживающих раму (16),
при этом способ включает следующие этапы, на которых:
(a) вращают фрезерный барабан (12);
(b) опускают вращающийся фрезерный барабан (12) в поверхность (14) грунта;
(c) измеряют параметр, соответствующий противодействующей силе, действующей на фрезерный барабан (12);
(d) определяют изменение измеряемого параметра, соответствующее увеличению противодействующей силы; и
(e) в ответ на определение изменения на этапе (d) и при продолжении вращения фрезерного барабана, замедляют скорость опускания на этапе (b) и, тем самым, предотвращают явление крена вперед или крена назад.
3. Способ по п.1, в котором этап (е) дополнительно включает приложение тормозного усилия к по меньшей мере одной из взаимодействующих с землей опор (28, 30).
4. Способ по п.1, в котором строительная машина (10), включает в себя корпус (18) фрезерного барабана, поддерживающий фрезерный барабан (12) на раме (16), причем на этапе (с) измеряемый параметр включает
выходной сигнал от по меньшей мере одного тензометрического датчика, расположенного на раме (16) или на корпусе (18) фрезерного барабана, или выходные сигналы от по меньшей мере двух тензометрических датчиков, расположенных на противоположных сторонах рамы или корпуса фрезерного барабана, или
выходной сигнал от динамометрического датчика, функционально связанного с рамой (16) и фрезерным барабаном (12), или
выходной сигнал от по меньшей мере одного тензометрического датчика, расположенного на раме (16) и измеряющего изгиб рамы (16), или
нагрузку в по меньшей мере одном подшипнике, поддерживающем с возможностью вращения фрезерный барабан на раме (16).
5. Способ по п.2, в котором строительная машина (10), включает в себя корпус (18) фрезерного барабана, поддерживающий фрезерный барабан (12) на раме (16), причем:
на этапе (с) измеряемый параметр включает
выходной сигнал от по меньшей мере одного тензометрического датчика, расположенного на раме (16) или на корпусе (18) фрезерного барабана, или выходные сигналы от по меньшей мере двух тензометрических датчиков, расположенных на противоположных сторонах рамы или корпуса фрезерного барабана, или
выходной сигнал от динамометрического датчика, функционально связанного с рамой (16) и фрезерным барабаном (12), или
выходной сигнал от по меньшей мере одного тензометрического датчика, расположенного на раме (16) и измеряющего изгиб рамы (16), или
нагрузку в по меньшей мере одном подшипнике, поддерживающем с возможностью вращения фрезерный барабан на раме (16).
6. Способ по п.4, в котором на этапе (с) по меньшей мере один тензометрический датчик ориентируют так, чтобы измеряемый параметр соответствовал составляющей противодействующей силы, ориентированной, по существу, перпендикулярно поверхности (14) грунта.
7. Способ по п.5, в котором на этапе (с) по меньшей мере один тензометрический датчик ориентируют так, чтобы измеряемый параметр соответствовал составляющей противодействующей силы, ориентированной, по существу, перпендикулярно поверхности (14) грунта.
8. Способ по п.1, дополнительно включающий:
измерение давления в гидравлическом силовом цилиндре, соединяющем одну из взаимодействующих с землей опор (28, 30) с рамой (16); и
прекращение работы фрезерного барабана (12), если измеренное давление в гидравлическом силовом цилиндре (32, 34) падает ниже заданного значения.
9. Способ по п.1, в котором этап (d) дополнительно включает определение, находится ли противодействующая сила в пределах рабочего диапазона (75), устанавливаемого как диапазон процентных отношений массы строительной машины, при этом диапазон ограничен нижней границей, (77) большей, чем 0%, и верхней границей (79), меньшей, чем 100%, причем предпочтительно нижняя граница (77) составляет по меньшей мере 50%, а верхняя граница (79) составляет не больше, чем 95%, а этап (е) дополнительно включает уменьшение скорости продвижения или замедление скорости опускания только, если противодействующая сила находится в пределах или выше рабочего диапазона (75).
10. Способ по п.9, в котором:
этап (е) дополнительно включает уменьшение движущей силы к движущему приводу до нуля или остановку опускания вращающегося фрезерного барабана (12) в поверхность (14) грунта, если противодействующая сила равна или больше, чем верхняя граница (79) рабочего диапазона (75).
11. Строительная машина (10), содержащая
раму (16),
фрезерный барабан (12), поддерживаемый рамой (16), для фрезерования поверхности (14) грунта, при этом фрезерный барабан (12) выполнен с возможностью приведения в действие в режиме попутного фрезерования;
множество взаимодействующих с землей опор (28, 30), поддерживающих раму (16) со стороны поверхности (14) грунта;
движущий привод (40, 42), связанный с по меньшей мере одной из взаимодействующих с землей опор (28, 30) для обеспечения движущей силы для продвижения строительной машины (10) по поверхности (14) грунта;
по меньшей мере один датчик (54, 56), выполненный с возможностью определения параметра, соответствующего противодействующей силе со стороны поверхности (14) грунта, действующей на фрезерный барабан (12);
исполнительный механизм (72, 74), функционально связанный с движущим приводом (40, 42), для регулирования выходной движущей силы посредством движущего привода; и
контроллер (62), соединенный с датчиком (54, 56), для приема входного сигнала от датчика (54, 56), и соединенный с исполнительным механизмом (72, 74), для отправки управляющего сигнала исполнительному механизму (72, 74), при этом контроллер (62) включает в себя рабочую программу, которая определяет изменение измеренного параметра, соответствующее увеличению противодействующей силы, и в ответ на изменение уменьшает движущую силу, передаваемую к движущему приводу (40, 42), для содействия предотвращению явления крена вперед строительной машины (10).
12. Строительная машина (10), содержащая
раму (16),
фрезерный барабан (12), поддерживаемый рамой (16), для фрезерования поверхности (14) грунта;
множество взаимодействующих с землей опор (28, 30), поддерживающих раму (16) со стороны поверхности (14) грунта;
по меньшей мере один датчик (54, 56), выполненный с возможностью определения параметра, соответствующего противодействующей силе со стороны поверхности (14) грунта, действующей на фрезерный барабан (12);
исполнительное средство (32, 34, 72, 74), функционально связанное с фрезерным барабаном (12) или с рамой (16) для регулирования скорости, с которой фрезерный барабан (12) опускается в поверхность (14) грунта; и
контроллер (62), связанный с датчиком (54, 56), для приема входного сигнала от датчика (54, 56), и связанный с исполнительным средством (32, 34, 72, 74) для отправки управляющего сигнала исполнительному средству (32, 34, 72, 74), при этом контроллер (62) включает в себя рабочую программу, которая определяет изменение измеренного параметра, соответствующее увеличению противодействующей силы, и в ответ на изменение уменьшает скорость, с которой фрезерный барабан (12) опускается в поверхность (14) грунта для содействия предотвращению явления крена вперед или крена назад строительной машины (10).
13. Машина (10) по п.11, дополнительно содержащая:
тормозную систему (78), соединенную с одной или более взаимодействующих с землей опор (28, 30);
при этом контроллер (62) также соединен с тормозной системой (78), а рабочая программа дополнительно направляет тормозную систему (78) для приложения тормозного усилия для содействия предотвращению явления крена вперед.
14. Машина (10) по п.11, в которой датчик (54, 56) содержит:
по меньшей мере один тензометрический датчик, или
по меньшей мере один динамометрический датчик, или
по меньшей мере один тензометрический датчик, прикрепленный к раме (16) и ориентированный для определения изгиба рамы (16), или
по меньшей мере один датчик нагрузки на подшипник.
15. Машина (10) по п.12, в которой датчик (54, 56) содержит:
по меньшей мере один тензометрический датчик, или
по меньшей мере один динамометрический датчик, или
по меньшей мере один тензометрический датчик, прикрепленный к раме (16) и ориентированный для определения изгиба рамы (16), или
по меньшей мере один датчик нагрузки на подшипник.
16. Машина (10) по п.14, в которой:
по меньшей мере один тензометрический датчик имеет ось датчика, ориентированную так, что по меньшей мере большая часть усилия, измеряемого тензометрическим датчиком, ориентирована перпендикулярно поверхности (14) грунта.
17. Машина (10) по п.15, в которой:
по меньшей мере один тензометрический датчик имеет ось датчика, ориентированную так, что по меньшей мере большая часть усилия, измеряемого тензометрическим датчиком, ориентирована перпендикулярно поверхности (14) грунта.
18. Машина (10) по п.14 или 16,
в которой по меньшей мере один тензометрический датчик расположен на раме (16), или
в которой по меньшей мере один тензометрический датчик дополнительно содержит по меньшей мере два тензометрических датчика на противоположных сторонах рамы (16), или
дополнительно содержащая корпус (18) фрезерного барабана, поддерживающий фрезерный барабан (12) на раме (16), при этом по меньшей мере один тензометрический датчик расположен на корпусе (18) фрезерного барабана, или
дополнительно содержащая корпус (18) фрезерного барабана, поддерживающий фрезерный барабан (12) на раме (16), причем по меньшей мере один тензометрический датчик дополнительно содержит по меньшей мере два тензометрических датчика на противоположных сторонах корпуса (18) фрезерного барабана.
19. Машина (10) по п.15 или 17,
в которой по меньшей мере один тензометрический датчик расположен на раме (16), или
в которой по меньшей мере один тензометрический датчик дополнительно содержит по меньшей мере два тензометрических датчика на противоположных сторонах рамы (16), или
дополнительно содержащая корпус (18) фрезерного барабана, поддерживающий фрезерный барабан (12) на раме (16), при этом по меньшей мере один тензометрический датчик расположен на корпусе (18) фрезерного барабана, или
дополнительно содержащая корпус (18) фрезерного барабана, поддерживающий фрезерный барабан (12) на раме (16), причем по меньшей мере один тензометрический датчик дополнительно содержит по меньшей мере два тензометрических датчика на противоположных сторонах корпуса (18) фрезерного барабана.
20. Машина (10) по п.11 или 13, в которой:
рабочая программа контроллера (62) определяет, находится ли противодействующая сила в пределах рабочего диапазона (75), продолжающегося от нижней границы (77) до верхней границы (79), при этом рабочая программа уменьшает движущую силу к движущему приводу или уменьшает скорость опускания вращающегося фрезерного барабана (12) в поверхность (14) грунта, если противодействующая сила находится в пределах рабочего диапазона (75),
причем рабочий диапазон (75) ограничен нижней границей (77), большей, чем 0%, и верхней границей (79), меньшей, чем 100%; при этом нижняя граница (77) рабочего диапазона предпочтительно составляет по меньшей мере 50% массы строительной машины (10), а верхняя граница (79) рабочего диапазона (75) предпочтительно меньше, чем 95% массы строительной машины (10).
21. Машина (10) по п.20, в которой:
рабочая программа уменьшает движущую силу до нуля или останавливает опускание вращающегося фрезерного барабана (12) в поверхность (14) грунта, если противодействующая сила равна или выше верхней границы (79) рабочего диапазона (75).
| US 7422391 B2, 09.09.2008 | |||
| СПОСОБ ВОССТАНОВЛЕНИЯ ДОРОЖНЫХ ОДЕЖД | 2007 |
|
RU2341610C1 |
| СТРОИТЕЛЬНАЯ МАШИНА | 2004 |
|
RU2332538C2 |
| СПОСОБ УСКОРЕНИЯ ПРОЦЕССА ПОЛУЧЕНИЯ АСФАЛЬТА ПРОДУВКОЙ НЕФТЯНЫХ ГУДРОНОВ ВОЗДУХОМ | 1925 |
|
SU12577A1 |
| US 5318378 A, 07.06.1994. | |||

