Изобретение относится к самоходной фрезерной машине в соответствии с ограничительной частью пункта 1 формулы изобретения, способу отвода сфрезерованного материала в соответствии с ограничительной частью пункта 9 формулы изобретения, а также дорожному или земляному рабочему агрегату в соответствии с пунктом 13 формулы изобретения.
Самоходная фрезерная машина способна отводить сфрезерованный материал на по меньшей мере одно транспортное средство, содержащее загрузочную поверхность.
Фрезерная машина содержит контроллер для операции перемещения и фрезеровки, а также рабочий барабан для фрезеровки, например, дорожного покрытия. Транспортное конвейерное устройство, например транспортное конвейерное устройство, содержащее по меньшей мере один транспортный конвейер, находится спереди или сзади рабочего барабана, как видно в направлении перемещения. Транспортное конвейерное устройство содержит выпускной конец, на котором сфрезерованный материал отводится на загрузочную поверхность по меньшей мере одного транспортного средства по пути полета в виде параболической траектории, обусловленной скоростью переноса. Последний или единственный транспортный конвейер транспортного конвейерного устройства, как видно в направлении транспортировки, может поворачиваться вбок относительно продольной оси фрезерной машины, на задаваемый угол поворота влево или вправо и может быть регулируемым по высоте посредством задаваемого угла подъема. Кроме того, скорость переноса транспортного конвейера может быть регулируемой.
В практической работе, проблемы возникают в координировании фрезерной машины с транспортным средством.
С фрезерной машиной с фронтальной загрузкой, например, сфрезерованный материал отводится вперед на транспортное средство, движущееся впереди. Оператору фрезерной машины необходимо подавать сигнал водителю транспортного средства, когда транспортному средству необходимо продолжать перемещение вперед и когда его необходимо остановить. Это приводит к проблемам, так как оператору, главным образом, необходимо концентрироваться на процессе фрезеровки и одновременно необходимо избегать столкновения с транспортным средством, движущимся впереди. Информация обычно передается посредством звукового гудка таким образом. Как только водитель транспортного средства слышит звучащий гудок, транспортное средство перемещается вперед на определенное расстояние. В этом контексте проблема возникает в ситуации, где водитель транспортного средства не слышит гудочного оповещения или если другое транспортное средство, проезжающее мимо, издает гудочное оповещение. DE 102009041842 A решает эти проблемы. Следующие проблемы могут возникнуть, если водитель транспортного средства не слышит гудочного оповещения и если он не приводит в движение транспортное средство вперед, это может вызвать столкновение поворачиваемого транспортного конвейера транспортного конвейерного устройства с транспортным средством, или оператору фрезерной машины необходимо остановить непрерывный процесс фрезеровки.
Если другое транспортное средство, проезжающее мимо, издает гудочное оповещение, водитель транспортного средства может ошибочно предположить, что он должен остановить свое транспортное средство. В этом случае также существует риск столкновения.
Дополнительная проблема заключается в том факте, что оператору фрезерной машины также необходимо иметь дело с загрузкой загрузочной поверхности посредством регулировки угла поворота, угла подъема и скорости переноса последнего или единственного транспортного конвейера транспортного конвейерного устройства, как видно в направлении транспортировки, и таким образом он отвлекается от его реальной задачи выполнения операции фрезеровки. Корректировка угла поворота может требоваться, например, при изменении направления поворота фрезерной машины.
В случае фрезерной машины с задней загрузкой, проблемы также возникают в координировании фрезерной машины с транспортным средством, особенно, когда транспортное средство необходимо приводить в движение сзади фрезерной машины задним ходом. Еще более высокий уровень нагрузки возникает для оператора фрезерной машины, когда ему необходимо управлять процессом фрезеровки при переднем ходе, с одной стороны, и необходимо осуществлять мониторинг загрузки транспортного средства позади фрезерной машины, как видно в направлении перемещения, необходимо контролировать угол поворота, угол подъема и/или скорость переноса транспортного конвейерного устройства и необходимо передавать необходимую информацию водителю транспортного средства, с другой стороны.
Является общеизвестным измерять расстояние между фрезерной машиной и транспортным средством с помощью ультразвуковых измерительных систем или других измеряющих расстояние систем для исключения столкновения между фрезерной машиной и транспортным средством. Проблема в этом контексте заключается в том, что разные транспортные средства не имеют одинаковой базовой поверхности, от которой может осуществляться измерение расстояния. Разная высота задней стенки транспортных средств и разный наклон транспортного конвейера, совместно с разными углами поворота транспортного конвейера, приводят к столкновениям транспортного конвейера с задней стенкой на совершенно разных расстояниях между фрезерной машиной и транспортным средством. По существу, существует проблема, заключающаяся в том, что датчик может быть только выровнен с неточно заданными базовыми поверхностями разных транспортных средств с существенной сложностью. Дополнительные проблемы существуют, если транспортное средство не выровнено прямолинейно с фрезерной машиной, или транспортный контейнер транспортного средства имеет наклонную или, в любом случае, невертикальную заднюю стенку. Измеряющие расстояние системы не работают, в частности, если транспортное средство движется с латеральным смещением относительно фрезерной машины и транспортный конвейер может сталкиваться с углом контейнера.
Следовательно, задачей изобретения является обеспечение самоходной фрезерной машины, а также способа отвода сфрезерованного материала фрезерной машины, который во всех рабочих ситуациях предотвращает повреждения фрезерной машины во время координирования процесса отвода.
Вышеупомянутая задача достигается посредством признаков пунктов 1 и 9 формулы изобретения соответственно.
Изобретение, предпочтительно, предусматривает размещение детектирующего устройства на нижней стороне транспортного конвейера, причем указанное детектирующее устройство используется для инициирования сигнала активации в случае приближения транспортного конвейера к объекту, в частности задней стенке загрузочной поверхности.
Столкновение с контейнером транспортного средства надежно предотвращается посредством детектирующего устройства, размещенного на нижней стороне транспортного конвейера, независимо от регулируемого угла подъема или угла поворота транспортного конвейера, независимо от относительного углового положения транспортного средства по отношению к фрезерной машине и независимо от формы контейнера на задней стенке и высоты задней стенки контейнера. Детектирующее устройство обеспечивает конкретное преимущество, заключающееся в независимости перемещений транспортного средства и фрезерной машины относительно друг друга.
Предпочтительно, для детектирующего устройства предусматривается содержание по меньшей мере одного имеющего планарную форму или по меньшей мере одного имеющего линейную форму чувствительного элемента. Такой чувствительный элемент является способным детектировать, на нижней стороне транспортного конвейера на удлиненной секции снизу транспортного конвейера, контакт с объектом раньше и независимо от положения поворота транспортного конвейера.
Предпочтительно, для чувствительного элемента предусматривается прохождение симметрично относительно продольной центральной линии транспортного конвейера и/или прохождение, по существу, на параллельном расстоянии относительно транспортного конвейера. Это обеспечивает возможность раннего детектирования столкновения без повреждения транспортного конвейера, на нижней стороне, и/или объекта столкновения.
Чувствительный элемент может быть гибким и может быть образован тяговым тросом или гибкой поверхностной конструкцией и проходит линейно. Гибкий чувствительный элемент также может быть отклоняемым для поддержания, по существу, одинакового расстояния относительно нижней стороны транспортного конвейера и для приспосабливания к криволинейной форме транспортного конвейера.
В качестве альтернативы, чувствительный элемент является жестким и образован, например, имеющим прямоугольную форму пластинчатым элементом.
В случае контакта с задней стенкой загрузочной поверхности или другого объекта, гибкий или жесткий чувствительный элемент детектирующего устройства воздействует на датчик, который генерирует сигнал активации и передает его на контроллер.
С гибким чувствительным элементом, сила натяжения может детектироваться на концах элемента, которая возникает вследствие смещения чувствительного элемента. Жесткий чувствительный элемент может, например, прикрепляться к транспортному конвейеру параллелограммным образом так, что смещение подвески может детектироваться датчиком.
Предпочтительный вариант осуществления предусматривает для контроллера, при наличии сигнала активации, генерирование сигнала управления для уменьшения скорости продвижения или для остановки машины, и/или увеличение угла подъема транспортного конвейера, и/или генерирование приводного сигнала для водителя транспортного средства.
В качестве альтернативы или дополнительно, для контроллера может предусматриваться, при наличии сигнала активации, генерирование сигнала тревоги и/или сигнала для уменьшения скорости конвейерной ленты.
Понижение скорости конвейерной ленты служит для обеспечения того, что сфрезерованный материал не отводится на крышу кабины водителя транспортного средства посредством уменьшения параболической траектории фрезерной машины.
Чувствительный элемент может соединяться по меньшей мере с одним механически приводимым в действие, или емкостным, или индуктивным, или оптоэлектронным датчиком.
В качестве альтернативы, чувствительный элемент может быть образован множеством емкостных, или индуктивных, или оптоэлектронных датчиков, размещенных линейно или планарно распределенным образом.
В соответствии с дополнительной альтернативой, чувствительный элемент может быть образован по меньшей мере одним световым барьером.
Является возможным генерировать сигнал управления перемещением, например визуальный или акустический сигнал, в соответствии с сигналом активации. Сигналы управления перемещением для транспортного средства были в общем описаны в DE 102009041842 Al.
Вышеупомянутая задача также достигается посредством признаков пункта 9 формулы изобретения.
Способ в соответствии с изобретением предусматривает для детектирующего устройства использование на нижней стороне транспортного конвейера, при этом указанное детектирующее устройство используется для генерирования сигнала активации в случае приближения транспортного конвейера к объекту, в частности задней стенке загрузочной поверхности.
Предпочтительный вариант осуществления предусматривает для контроллера содержание узла детектирования и управления, который автоматически управляет позиционированием точки падения сфрезерованного материала.
Такой контроллер позволяет оператору фрезерной машины концентрироваться на процессе фрезеровки и на перемещении вдоль указанного пути фрезеровки. Автоматическая процедура отвода осуществляется таким образом, что обеспечивается автоматическое координирование процедуры отвода с перемещением фрезерной машины и транспортного средства, даже при движении на повороте. Например, угол поворота последнего или единственного транспортного конвейера транспортного конвейерного устройства, как видно в направлении транспортировки, также может быть управляемым в соответствии с углом поворота самоходной фрезерной машины.
В дальнейшем, варианты осуществления изобретения показаны более подробно со ссылкой на чертежи.
Ниже показано:
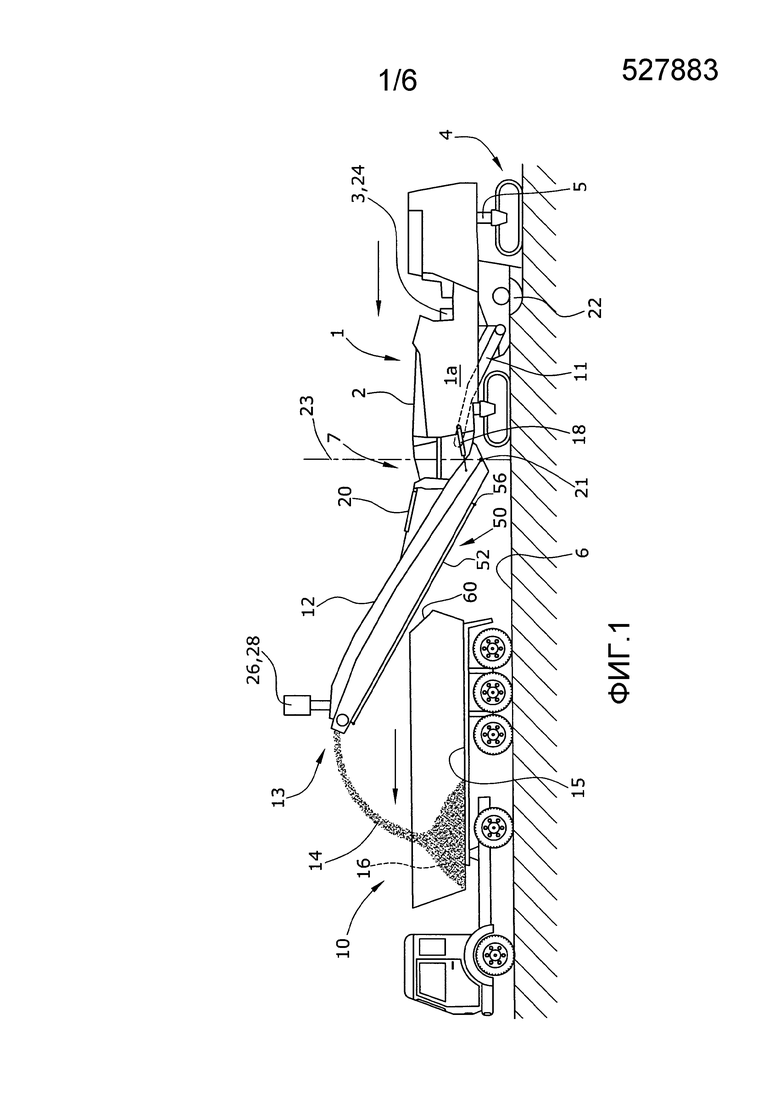
фиг. 1 - дорожно-фрезерная машина с фронтальной загрузкой,
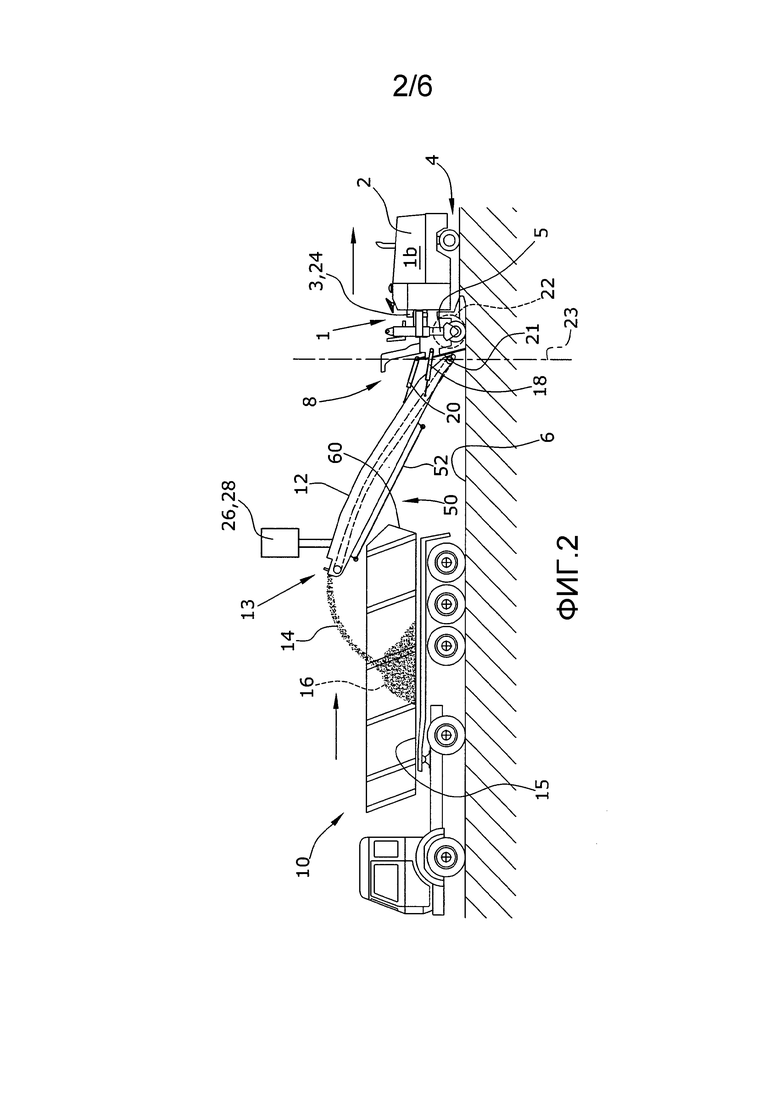
фиг. 2 - дорожно-фрезерная машина с задней загрузкой,
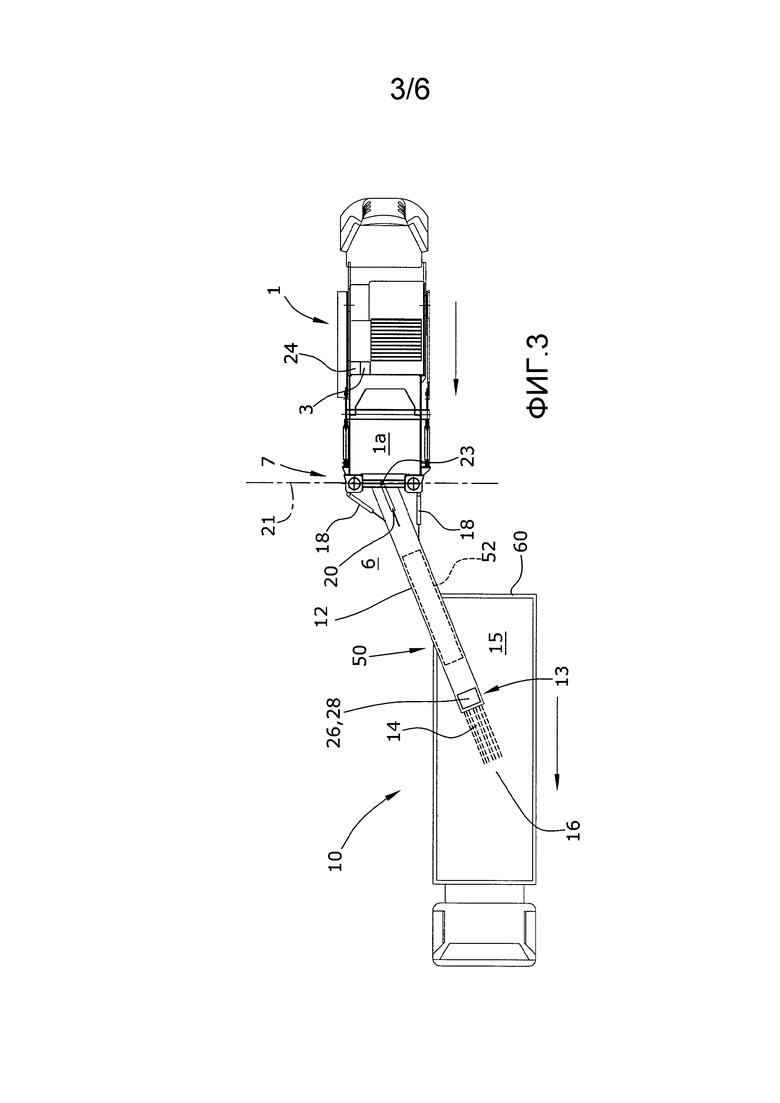
фиг. 3 - вид сверху фрезерной машины в соответствии с фиг. 1,
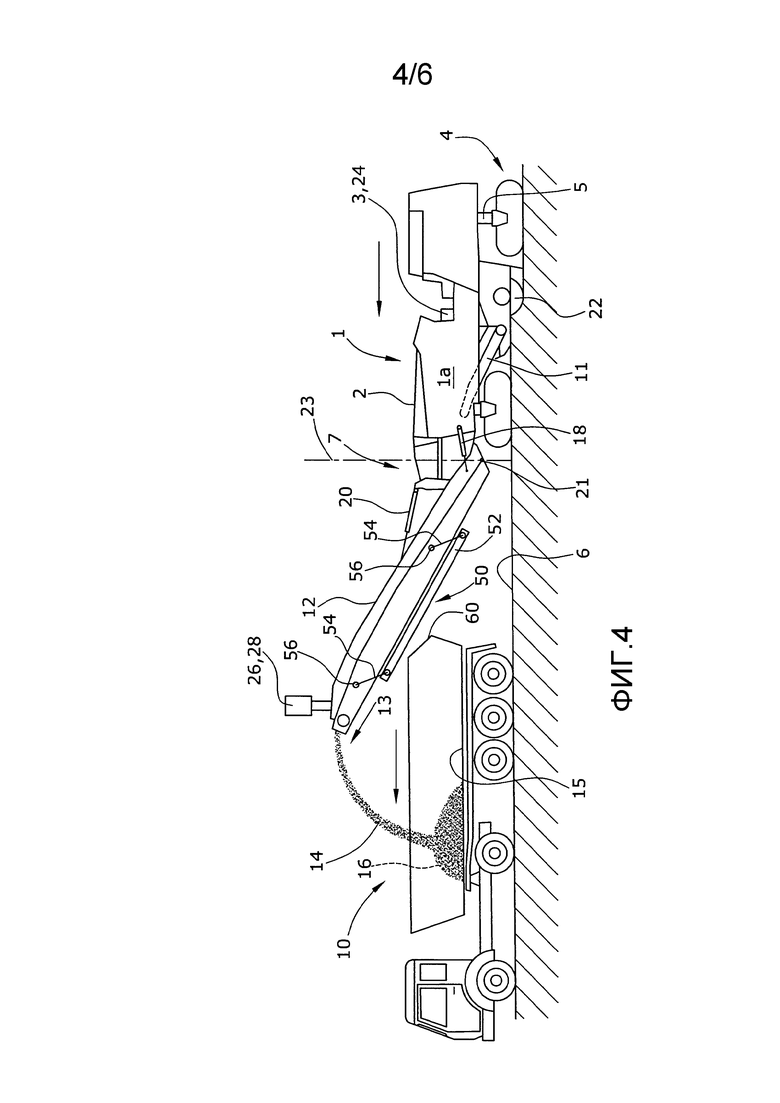
фиг. 4 - дополнительный вариант осуществления,
фиг. 5 - вид нижней стороны транспортного конвейера в соответствии с фиг. 1,
фиг. 6 - альтернативный вариант осуществления,
фиг. 7 - дополнительный вариант осуществления с датчиками, размещенными планарным образом, и
фиг. 8 - вариант осуществления, содержащий световой барьер.
На фиг. 1 показана фрезерная машина 1, использующаяся в качестве примера дорожно-фрезерной машины 1a с фронтальной загрузкой. Указанная фрезерная машина 1 содержит раму 2 машины, которая поддерживается шасси 4, образованным, например, гусеничными сцепляющимися с землей узлами или колесами, при этом указанное шасси 4 соединено с рамой 2 машины посредством по меньшей мере трех устройств регулирования высоты в виде подъемных колонн 5. Как можно понять из фиг. 2, вариант осуществления предусматривает четыре подъемные колонны 5, которые могут использоваться для приведения рамы 2 машины в задаваемую плоскость, проходящую, предпочтительно, параллельно относительно дорожной поверхности 6, которая поддерживает гусеничные сцепляющиеся с землей узлы шасси 4.
Дорожно-фрезерная машина, показанная на фиг. 1, содержит в продольном направлении фрезерной машины 1a рабочий барабан 22 между гусеничными сцепляющимися с землей узлами шасси 4.
Фрезерные машины 1a, 1b могут содержать гусеничные сцепляющиеся с землей узлы и/или колеса. Рабочий барабан может быть регулируемым по высоте посредством подъемных колонн 5, поддерживающих раму 2 машины, или относительно рамы 2 машины.
Другие конструкции фрезерной машины 1b также могут иметь рабочий барабан 22, например, на высоте задних гусеничных сцепляющихся с землей узлов или колес шасси 4.
Транспортное конвейерное устройство по меньшей мере с одним транспортным конвейером 11, 12 для транспортировки сфрезерованного фрезеруемого материала также может размещаться на переднем конце 7 или заднем конце 8 фрезерной машины 1a, 1b.
На фиг. 2 показана фрезерная машина 1b с задней загрузкой в качестве примера, в котором транспортное средство 10 движется позади фрезерной машины 1 задним ходом.
При условии, что достаточное пространство доступно сбоку рядом с фрезерной машиной 1a, 1b, транспортное средство 10 также может перемещаться передним ходом спереди фрезерной машины 1 по другому пути, как показано на фиг. 3.
Направления перемещения соответствующих транспортных средств на фиг. 1-3 обозначены стрелками.
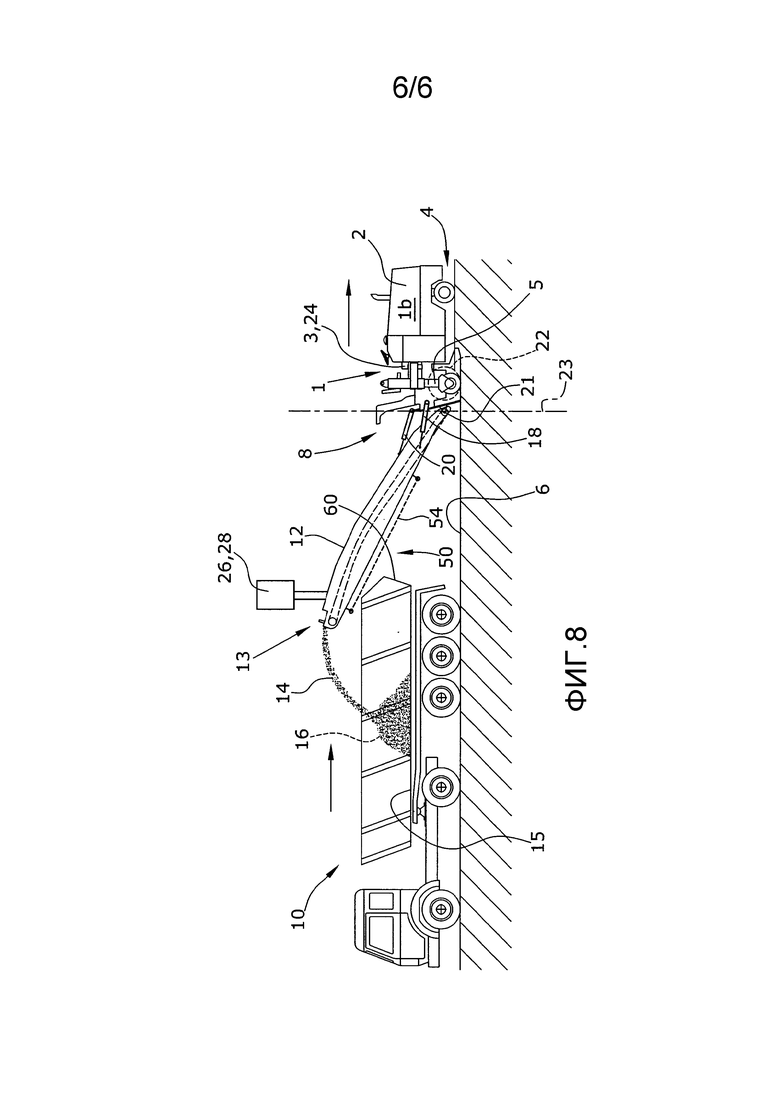
В варианте осуществления, показанном на фиг. 1, фрезеруемый материал, сфрезерованный посредством рабочего барабана 22, отводится на загрузочную поверхность 15 транспортного средства 10 посредством первого стационарного транспортного конвейера 11 транспортного конвейерного устройства, который передает сфрезерованный материал 14 на второй поворотный транспортный конвейер 12. В результате скорости транспортного конвейера 12, сфрезерованный материал 14 не отводится непосредственно на конце транспортного конвейера 12, а сфрезерованный материал следует по параболической траектории таким образом, что точка 16 падения на загрузочной поверхности 15 располагается на расстоянии от свободного конца 13 транспортного конвейера 12. Транспортный конвейер 12 является поворотным из нейтрального положения влево или вправо посредством узлов 18 поршневых цилиндров для того, чтобы быть способным отводить сфрезерованный материал 14 на загрузочную поверхность 15, даже при движении на повороте или в случае движения транспортного средства 10 по смещенному пути. Кроме того, водитель транспортного средства фрезерной машины 1a, 1b может регулировать угол подъема транспортного конвейера 12 посредством узла 20 поршневого цилиндра. Угол подъема влияет на параболическую траекторию сфрезерованного материала 14 и на положение точки 16 падения, а также влияет на скорость переноса транспортного конвейера 12.
Текущий отрегулированный угол подъема вокруг горизонтальной первой оси 21 или угол поворота вокруг вертикальной второй оси 23 соответственно передается на узел 24 детектирования и управления, дополнительно содержащий по меньшей мере один детектор 26, который непрерывно детектирует положение загрузочной поверхности 15 и/или последнего или единственного транспортного конвейера 12, как видно в направлении транспортировки. Указанный детектор 26 является размещаемым либо на фрезерной машине 1a, 1b, на конце, обращенном к транспортному конвейерному устройству, либо на свободном конце 13 транспортного конвейера 12.
Узел 24 детектирования и управления способен встраиваться в контроллер 3 для операции перемещения и фрезеровки или как минимум является соединяемым с ним также, в случае необходимости, для получения данных о скорости перемещения и/или обнаруженном угле поворота фрезерной машины 1a, 1b и скорости переноса транспортного конвейера 12.
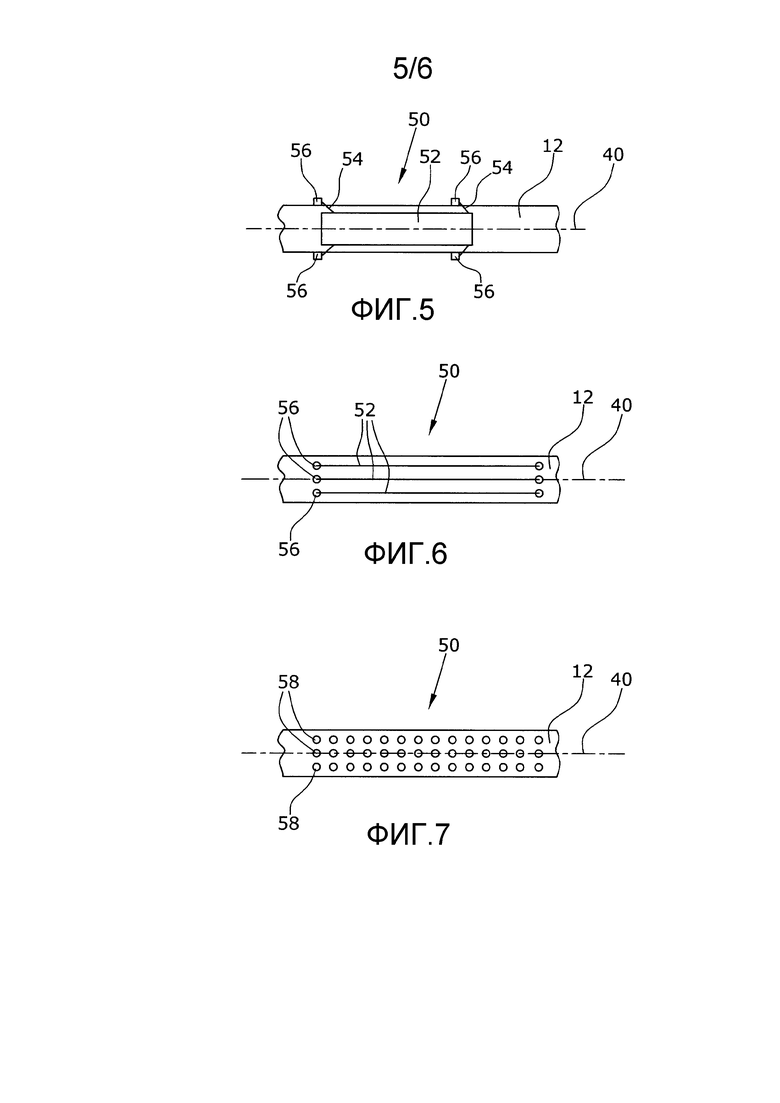
На фиг. 1 и 2 показано детектирующее устройство 50 на нижней стороне транспортного конвейера 12, при этом указанное детектирующее устройство 50 содержит имеющий линейную форму чувствительный элемент 52. Чувствительный элемент 52 может быть образован, например, по меньшей мере одним тросообразным или проволочным элементом, который проходит, по существу, параллельно и на расстоянии относительно транспортного конвейера 12 и закреплен на его концах таким образом, что по меньшей мере один датчик 56 может детектировать смещение чувствительного устройства 52.
Чувствительный элемент 52 проходит, предпочтительно, симметрично относительно продольной центральной линии 40 транспортного конвейера 12, как можно наилучшим образом понять из фиг. 5 и 6. Чувствительный элемент 52 может, например, быть образован проволочными тросами (фиг. 6) или гибкой поверхностной конструкцией, которая прикрепляется аналогично имеющему линейную форму чувствительному элементу таким образом, что смещение поверхностной конструкции, когда в контакте с объектом или с задней стенкой 60 транспортного средства 10, инициирует посредством по меньшей мере одного датчика 56 сигнал активации, который является подаваемым на контроллер 3.
Чувствительный элемент также может быть образован жестким пластинчатым элементом, который прикрепляется к транспортному конвейеру 12 параллелограммным образом, как показано на фиг. 4 и 5. В этой конструкции датчики 56 могут быть выполнены, например, в виде датчиков угла поворота, которые в соединениях могут детектировать перемещение подвески 54. Следует понимать, что пластинчатый чувствительный элемент 52 может удерживаться в его ненагруженном положении, например, посредством пружинного усилия и смещается только в случае контакта с объектом.
Каждый из чувствительных элементов 52 может соединяться по меньшей мере с одним механически приводимым в действие датчиком или с емкостным или индуктивным или оптоэлектронным датчиком.
В соответствии с альтернативой, показанной на фиг. 7, детектирующее устройство 50 может, в областях гибких или жестких чувствительных элементов 52, показанных на фиг. 1-6, быть образовано из множества емкостных, или индуктивных, или оптоэлектронных датчиков 58, размещенных линейно или планарно распределенным образом.
В соответствии с дополнительной альтернативой, показанной на фиг. 8, детектирующее устройство 50 может быть образовано, например, в областях гибких или жестких чувствительных элементов 52, показанных на фиг. 1-6, по меньшей мере одним световым барьером 54.
Продольная протяженность детектирующего устройства 50 может, по существу, проходить по большей части длины транспортного конвейера 12, как показано на фиг. 1, или может проходить только до отдельной интересующей области, как показано на фиг. 2 и 4.
Узел 24 детектирования и управления может определять изменяемое положение загрузочной поверхности 15 транспортного средства 10 и транспортного конвейера 12 относительно рамы 2 машины и непрерывно и автоматически управлять позиционированием точки 16 падения сфрезерованного материала 14 посредством угла поворота и/или угла подъема и/или скорости переноса транспортного конвейерного устройства таким образом, что отводимый сфрезерованный материал 14 падает как минимум в пределах загрузочной поверхности 15. В качестве альтернативы, изменяемое положение загрузочной поверхности 15 транспортного средства 10 также может непрерывно определяться относительно транспортного конвейера 12 для выполнения операции управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНАЯ ФРЕЗЕРНАЯ МАШИНА И СПОСОБ ВЫГРУЗКИ СФРЕЗЕРОВАННОГО МАТЕРИАЛА | 2015 |
|
RU2611802C2 |
| САМОХОДНАЯ ФРЕЗЕРНАЯ МАШИНА, А ТАКЖЕ СПОСОБ ВЫГРУЗКИ СФРЕЗЕРОВАННОГО МАТЕРИАЛА | 2015 |
|
RU2631747C2 |
| АВТОМАТИЗИРОВАННАЯ МАШИНА ДЛЯ ИЗМЕЛЬЧЕНИЯ, А ТАКЖЕ СПОСОБ ВЫГРУЗКИ ИЗМЕЛЬЧЕННОГО МАТЕРИАЛА | 2013 |
|
RU2610042C2 |
| СИСТЕМА ДЛЯ ОТСЛЕЖИВАНИЯ СРОКА ЭКСПЛУАТАЦИИ КОНВЕЙЕРА РАБОЧЕЙ МАШИНЫ | 2018 |
|
RU2723420C1 |
| СИСТЕМА БЛОКИРОВКИ ФРЕЗЕРНОГО БАРАБАНА ДОРОЖНОЙ ФРЕЗЕРНОЙ МАШИНЫ | 2018 |
|
RU2695210C1 |
| САМОХОДНЫЙ ПЕРЕГРУЗОЧНЫЙ БУНКЕР | 2013 |
|
RU2535991C1 |
| Машина для сбора фрезерного торфа из расстила | 1982 |
|
SU1099083A1 |
| ФРЕЗЕРНАЯ МАШИНА ДЛЯ ДОРОЖНЫХ ПОВЕРХНОСТЕЙ ИЛИ ТРОТУАРОВ | 2015 |
|
RU2681968C2 |
| СИСТЕМА И СПОСОБ РУЛЕВОГО УПРАВЛЕНИЯ СОСТАВА КОЛЕСНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2438909C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПРИЕМА И ТРАНСПОРТИРОВКИ МУСОРА | 1993 |
|
RU2119883C1 |
В самоходной фрезерной машине, содержащей рабочий барабан, транспортный конвейер для отвода сфрезерованного материала, снятого рабочим барабаном, на загрузочную поверхность транспортного средства, содержащего заднюю стенку, транспортный конвейер выполнен поворачиваемым относительно рамы машины вокруг первой оси, проходящей, по существу, горизонтально, на угол подъема, и вбок вокруг второй оси, проходящей ортогонально относительно первой оси, на угол поворота. На нижней стороне транспортного конвейера размещено детектирующее устройство, которое используется для инициирования сигнала активации в случае приближения транспортного конвейера к объекту, в частности задней стенке загрузочной поверхности. Контроллер при наличии сигнала активации генерирует сигнал управления для уменьшения скорости продвижения или для остановки машины и/или увеличивает угол подъема транспортного конвейера. 3 н. и 10 з.п. ф-лы, 8 ил.
1. Самоходная фрезерная машина (1), содержащая
раму (2) машины;
контроллер (3) для операции перемещения и фрезеровки;
рабочий барабан (22);
транспортный конвейер (12) для отвода сфрезерованного материала (14), снятого рабочим барабаном (22), на загрузочную поверхность (15) транспортного средства (10), содержащего заднюю стенку (60),
причем транспортный конвейер (12) является поворачиваемым относительно рамы (2) машины вокруг первой оси (21), проходящей, по существу, горизонтально, на угол подъема, и вбок вокруг второй оси (23), проходящей ортогонально относительно первой оси (20), на угол поворота,
причем на нижней стороне транспортного конвейера (12) размещено детектирующее устройство (50) для определения приближения транспортного конвейера (12) к объекту,
отличающаяся тем, что
детектирующее устройство (50) используется для инициирования сигнала активации на контроллер (3) в случае приближения транспортного конвейера (12) к объекту, в частности задней стенке (60) загрузочной поверхности (15),
причем контроллер (3) при наличии сигнала активации генерирует сигнал управления для уменьшения скорости продвижения или для остановки машины и/или увеличивает угол подъема транспортного конвейера (12).
2. Фрезерная машина (1) по п. 1, отличающаяся тем, что детектирующее устройство (50) содержит по меньшей мере один имеющий планарную форму или по меньшей мере один имеющий линейную форму чувствительный элемент (52).
3. Фрезерная машина (1) по п. 2, отличающаяся тем, что чувствительный элемент (52) проходит симметрично относительно продольной центральной линии (40) транспортного конвейера (12) и/или проходит, по существу, на параллельном расстоянии относительно транспортного конвейера (12).
4. Фрезерная машина (1) по п. 2 или 3, отличающаяся тем, что чувствительный элемент (52) детектирующего устройства (50), в случае контакта с объектом, воздействует на датчик (56), который генерирует сигнал активации.
5. Фрезерная машина (1) по п. 1 или 2, отличающаяся тем, что контроллер (3) при наличии сигнала активации генерирует сигнал тревоги и/или сигнал для уменьшения скорости конвейерной ленты.
6. Фрезерная машина (1) по п. 2 или 3, отличающаяся тем, что чувствительный элемент (52) соединен по меньшей мере с одним механически приводимым в действие, или емкостным, или индуктивным, или оптоэлектронным датчиком (56).
7. Фрезерная машина (1) по п. 2, отличающаяся тем, что чувствительный элемент (52) образован множеством емкостных, или индуктивных, или оптоэлектронных датчиков (52), размещенных линейно или планарно распределенным образом.
8. Фрезерная машина (1) по п. 2 или 3, отличающаяся тем, что чувствительный элемент (52) образован по меньшей мере одним световым барьером.
9. Способ отвода снятого сфрезерованного материала (14) самоходной фрезерной машины (1) на загрузочную поверхность (15) транспортного средства (10), при котором
управляют фрезерной машиной (1) для операции перемещения и фрезеровки,
сфрезерованный материал (14), снятый рабочим барабаном (22), отводят на загрузочную поверхность (15) транспортного средства (10) посредством транспортного конвейера (12), который выполнен поворачиваемым вбок относительно рамы (2) фрезерной машины (1) на угол поворота и регулируемым на угол подъема относительно высоты отвода, и
используют детектирующее устройство (50) на нижней стороне транспортного конвейера (12) для определения приближения транспортного конвейера (12) к объекту,
отличающийся тем, что
детектирующее устройство (50) используют для генерирования сигнала активации в случае приближения транспортного конвейера (12) к объекту и
при наличии сигнала активации генерируют сигнал управления для уменьшения скорости продвижения или для остановки машины и/или увеличивают угол подъема транспортного конвейера (12).
10. Способ по п. 9, отличающийся тем, что для детектирующего устройства (50) используют по меньшей мере один имеющий планарную форму или по меньшей мере один имеющий линейную форму чувствительный элемент (52).
11. Способ по п. 9 или 10, отличающийся тем, что при наличии сигнала активации генерируют сигнал тревоги или сигнал для уменьшения скорости конвейерной ленты.
12. Способ по п. 9 или 10, отличающийся тем, что позиционированием точки (16) падения сфрезерованного материала (14) на загрузочную поверхность (15) управляют автоматически.
13. Дорожный или земляной рабочий агрегат, содержащий самоходную фрезерную машину (1) и по меньшей мере одно транспортное средство (10), перемещаемое независимо от фрезерной машины (1) и позиционируемое относительно фрезерной машины (1) таким образом, что сфрезерованный материал (14), снятый фрезерной машиной (1), отводится на транспортное средство (10),
отличающийся наличием
фрезерной машины (1), содержащей признаки по пп. 1-8.
| СПОСОБ СРАВНИТЕЛЬНОЙ ОЦЕНКИ СТРУКТУР ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СЕТИ | 2014 |
|
RU2573267C2 |
| US 20130269832 A1, 17.10.2013 | |||
| СИСТЕМА ДОБЫЧИ НЕФТИ | 2018 |
|
RU2700748C2 |
| ЭЛЕКТРОФОТОГРАФИЧЕСКИЙ ТОНЕР, ПРОЯВИТЕЛЬ, СОДЕРЖАЩИЙ ТОНЕР, И УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ | 2012 |
|
RU2573566C2 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| ФРЕЗЕРНЫЙ БАРАБАН И СТРОИТЕЛЬНАЯ МАШИНА | 2000 |
|
RU2241099C2 |

