ОПИСАНИЕ
Перекрестная ссылка на предварительную заявку
Эта заявка PCT объявляет приоритет: (1) предварительный заявки на патент США № 60/855064, озаглавленной "Системы, способы и устройство для обнаружения частиц и анализа и его развертывание на месте применения" ("Systems, Methods and Apparatus for Particle Detection and Analysis and Field Deployment of the Same") и поданной 27 октября 2006 г., и (2) заявки на патент США № 11/771169, озаглавленной "Портальная система контроля радиации и способ" ("Radiation Portal Monitor System and Method") и поданной 29 июня 2007 г.
Описания вышеупомянутых двух заявок включены сюда в качестве ссылочного материала.
Заявление относительно федеральных прав
Это изобретение было сделано при поддержке Правительства согласно контракту № DE-AC52-06NA25396, предоставленному Министерством энергетики Соединенных Штатов. Правительство имеет определенные права на изобретение.
Область техники
Варианты осуществления изобретения относятся к областям обнаружения частиц, анализа, контроля и, более конкретно, но не исключительно, к безопасности и портальным системам и способам контроля.
Предпосылки изобретения
Угроза подрыва ядерного устройства в большом американском городе побудила исследования, нацеленные на обеспечение более жесткого контроля границ в отношении контрабанды ядерных материалов.
Статья, озаглавленная "Террористическая угроза - движение ядерных материалов черного рынка в Соединенные Штаты", датированная ноябрем 2001 г. (Gene R. Kelley), из архивов Фонда мира ядерного века, PMB 121, 1187 Coast Village Road, Suite 1, Santa Barbara, CA 93108, USA, выделяет проблему тайной транспортировки специальных ядерных материалов. Kelley обращается к некоторым возможностям движения материала этого типа следующим образом:
1) приложение для транспортировки малых, хорошо экранированных упаковок на установившихся маршрутах транспортировки наркотиков и контрабанды,
2) транспортировка материалов обычно в хорошо экранированных небольших контейнерах через тайную сеть широко распространенных агентов,
3) переноска людьми больших количеств небольших доз через, в основном, прозрачные границы Соединенных Штатов,
4) использование разнообразных способов распространения (маршрутов и перевозок), требующих множество маршрутов - пунктов и изменения внешних характеристик транспортных контейнеров в каждой точке,
5) смешивание материалов и законных продуктов для повседневных поставок.
Kelley заключает, что обширность задач обнаружения и опознания хорошо упакованных ядерных материалов делает вероятность обнаружения малых количеств очень сомнительной.
Использование портальных мониторов в пограничных пунктах контроля становится обычной практикой для обнаружения ввозимых контрабандой ядерных материалов. Во многих случаях может использоваться экранирование для укрытия ядерных признаков. В обычных детекторах ядерных материалов используют гамма-детекторы или детекторы рентгеновского излучения высокого разрешения.
Неэкранированные количества в килограммах высокообогащенного урана могут быть обнаружены с высокой надежностью с 1-минутным временем отсчета посредством обнаружения гамма-лучей от примесей урана-238. На фиг. 1 прилагаемых чертежей показан пример данных отсчета от гамма-детектора высокого разрешения, использованного для обнаружения оружейного урана: 10% урана-238, 90% урана-235 без экранирования и с экранированием из свинца толщиной 5 см и 2,5 см, соответственно. На фиг. 1 показано, как самоэкранирование ядерного материала понижает скорости отсчета. Для экранирования опасного объекта требуются свинец, золото, вольфрам или другой экранирующий материал толщиной приблизительно 5 см.
Как показано на фиг. 1 и дополнительно на фиг. 2 и 3, которые иллюстрируют моделирование рентгенографии 20 кг урана среди автомобильных дифференциалов с использованием расходящегося пучка рентгеновских лучей, произведенных источником 8МВ. Эти моделирования показывают, что рентгеновская радиография может визуализировать объекты даже в некотором плотном, загромождающем грузе, но окончательные характеристики объектов, состоящих из тяжелых элементов, искажаются рассеянными фонами и недостаточны для пропуска многих грузов.
Учитывая указанное выше, небольшое количество материала, необходимое для создания ядерного устройства, и легкость, с которой характеристики нейтронного и гамма-излучения могут быть скрыты при помощи экранирования, затрудняют жесткий контроль границы в отношении контрабанды ядерных материалов.
Сущность изобретения
Следующее краткое описание изобретения дано для облегчения понимания технических признаков, связанных со способами, устройством и системами для обнаружения частиц, таких как мю-мезоны, и не представляет собой полное описание. Полная оценка различных объектов изобретения может быть получена посредством ознакомления с полным описанием, формулой изобретения, чертежами и рефератом в целом.
Способы, устройство и системы для обнаружения частиц, таких как мю-мезоны, описаны в различных примерах. В одном варианте осуществления изобретения описана система обнаружения частиц, включающая первый набор позиционно-чувствительных детекторов заряженных частиц, расположенных на первой стороне зоны расположения объекта, для измерения положений и направлений бомбардирующих заряженных частиц, направляющихся к зоне расположения объекта, второй набор позиционно-чувствительных детекторов заряженных частиц, расположенных на второй стороне зоны расположения объекта, противоположной первой стороне, для измерения положений и направлений вылетающих заряженных частиц, выходящих из зоны расположения объекта, и блок обработки сигналов, который может включать, например, микропроцессор для приема данных сигналов измерений относительно влетающих заряженных частиц от первого набора позиционно-чувствительных детекторов заряженных частиц и сигналов измерений относительно вылетающих заряженных частиц от второго набора позиционно-чувствительных детекторов заряженных частиц. Этот блок обработки сигналов конфигурирован для анализа рассеяния мю-мезонов в материалах в пределах зоны расположения объекта на основе измеренных входных и выходных положений и направлений заряженных частиц для получения томографического профиля или пространственного распределения рассеивающих центров в пределах зоны расположения объекта. Полученный томографический профиль или пространственное распределение рассеивающих центров может использоваться для обнаружения присутствия или отсутствия одного или более объектов в зоне расположения объекта, таких как материалы с высокими атомными числами, включая ядерные материалы или устройства. Каждый позиционно-чувствительный детектор заряженных частиц может быть выполнен в различных конфигурациях, включая дрейфовые ячейки, такие как пролетные (дрейдовые) трубки, заполненные газом, который может быть ионизирован заряженными частицами. Дрейфовые ячейки могут быть расположены для обеспечения, по меньшей мере, трех позиционных измерений относительно заряженных частиц в первом направлении и, по меньшей мере, трех позиционных измерений относительно заряженных частиц во втором направлении, отличном от указанного первого направления. Дрейфовые ячейки также могут быть приспособлены и расположены на окружающих сторонах объема таким образом, чтобы дрейфовые ячейки формировали коробчатую или четырехстороннюю структуру. Такая система может применяться для использования естественных произведенных космическими лучами мю-мезонов, как источника мю-мезонов для обнаружения одного или более объектов в зоне расположения объекта. Например, система может использоваться для осмотра занятых пассажирами транспортных средств в пунктах пересечения границы на предмет представляющих ядерную опасность объектов.
Вышеупомянутые объекты изобретения и одно или более преимуществ теперь могут быть достигнуты согласно данному описанию.
Согласно одному объекту, система контроля имеет систему отслеживания произведенных космическими лучами заряженных частиц с множеством детекторов заряженных частиц. Детекторы заряженных частиц имеют форму дрейфовых ячеек, которые могут представлять собой, например, пролетные трубки круглого или некруглого поперечного сечения или нетрубчатые ячейки, конфигурированные как для обеспечения отслеживания влетающих и вылетающих проходящих сквозь контролируемый объем заряженных частиц, таких как производимые космическими лучами мю-мезоны, так и для обнаружения гамма-лучей. Система может как выборочно обнаруживать устройства или материалы, в частности, но не исключительно, материалы высокой плотности, такие как железо, свинец, золото и/или вольфрам, находящиеся в объеме, на основе многократного рассеяния заряженных частиц, проходящих сквозь объем, так и обнаруживать радиоактивные источники, находящиеся в объеме, на основе испускаемых от них гамма-лучей.
Предпочтительно, принятие дрейфовых ячеек как детекторов заряженных частиц в системе отслеживания на космических лучах, эффективно обеспечивает комбинирование функций радиографического устройства на космических лучах со счетчиком гамма-излучения для получения надежного детектора для обнаружения ядерной опасности. Это устраняет потребность в двух отдельных инструментах.
Дрейфовые ячейки могут представлять собой герметизированные дрейфовые ячейки, дополнительно понижающими стоимость и сложность системы, устраняя потребность в системе газоснабжения.
Типичный рабочий газ в пролетных трубках содержит невоспламеняющийся газ, такой как смесь аргона, двуокиси углерода и тетрафторметана (CF4).
Дрейфовые ячейки могут содержать набор пролетных трубок, расположенных над объемом, и другой набор пролетных трубок, расположенных под объемом. Каждый набор пролетных трубок может иметь, по меньшей мере, три пролетные трубки, конфигурированные в первом направлении, и другие, по меньшей мере, три пролетные трубки, конфигурированные во втором направлении. Первое направление может быть ортогональным ко второму направлению.
В пределах системы может быть расположен источник гамма-лучей или нейтронов для обеспечения активного исследования материала, находящегося в объеме.
Согласно другому объекту, система контроля имеет средство отслеживания произведенных космическими лучами мю-мезонов, имеющее множество детекторов мю-мезонов в форме дрейфовых ячеек. Пролетные трубки могут быть расположены, по меньшей мере, над и под контролируемым объемом как для обеспечения отслеживания влетающих и вылетающих мю-мезонов, так и для подсчета гамма-лучей. При использовании система может и выборочно обнаруживать экранирование высокой плотности радиоактивного материала, находящегося в объеме, благодаря многократному рассеянию мю-мезонов, проходящих сквозь объем, и обнаруживать радиоактивный материал, находящийся в объеме, благодаря испускаемым им гамма-лучам.
Сканируемый объем может иметь достаточный размер, позволяющий разместить в нем транспортное средство или грузовой контейнер. Предпочтительно, принятие пролетных трубок как детекторов мю-мезонов позволяет системе выполнять пассивное сканирование занимаемых пассажирами транспортных средств с коротким временем сканирования и без доз излучения выше окружающего фона.
Согласно еще одному объекту, способ контроля содержит расположение множества дрейфовых ячеек на противоположных сторонах контролируемого объема; обнаружение при помощи дрейфовых ячеек влетающих и вылетающих произведенных космическими лучами заряженных частиц вместе с любыми гамма-лучами; выборочное обнаружение любого материала, находящегося в объеме, благодаря многократному рассеянию заряженных частиц, проходящих сквозь объем; и обнаружение при помощи гамма-лучей любых радиоактивных источников, находящихся в объеме.
Подготовка множества дрейфовых ячеек может содержать подготовку набора, по меньшей мере, из трех плоскостей пролетных трубок над объемом и подготовку набора, по меньшей мере, из трех плоскостей пролетных трубок под объемом и может также содержать подготовку пролетных трубок в каждой плоскости в двух ортогональных координатах.
Краткое описание чертежей
Прилагаемые фигуры, на которых одинаковые ссылочные позиции относятся к идентичным или функционально-подобным элементам во всех отдельных видах и которые включены в описание и формируют его часть, дополнительно поясняют настоящее изобретение и совместно с подробным описанием изобретения служат для пояснения принципов настоящего изобретения.
Фиг. 1 - примерные данные подсчета гамма-детектором высокого разрешения, использованного для обнаружения оружейного урана: 10% урана-238 и 90% урана-235 с использованием сигналов гамма-лучей от пробы 400 граммов урана-238 без экранирования и с экранированием свинцом толщиной 5 см и 2,5 см, соответственно;
фиг. 2 и 3, 1 (Предшествующий уровень техники) - виды моделирования рентгеновских радиографий обнаружения урана среди автомобильных дифференциалов и расходящегося пучка 8 МВ;
фиг. 4 - портальная система контроля с использованием космических лучей для обнаружения объекта согласно одному варианту осуществления изобретения;
фиг. 5 - вид сбоку другой портальной системы контроля с использованием космических лучей для обнаружения объекта согласно другому варианту осуществления изобретения;
фиг. 6 - подробный вид в перспективе портальной системы контроля согласно предпочтительному варианту осуществления изобретения;
фиг. 7 - вид сечения части модуля пролетных трубок, конфигурированного для обнаружения заряженных космическими лучами частиц и гамма-лучей согласно одному варианту осуществления изобретения;
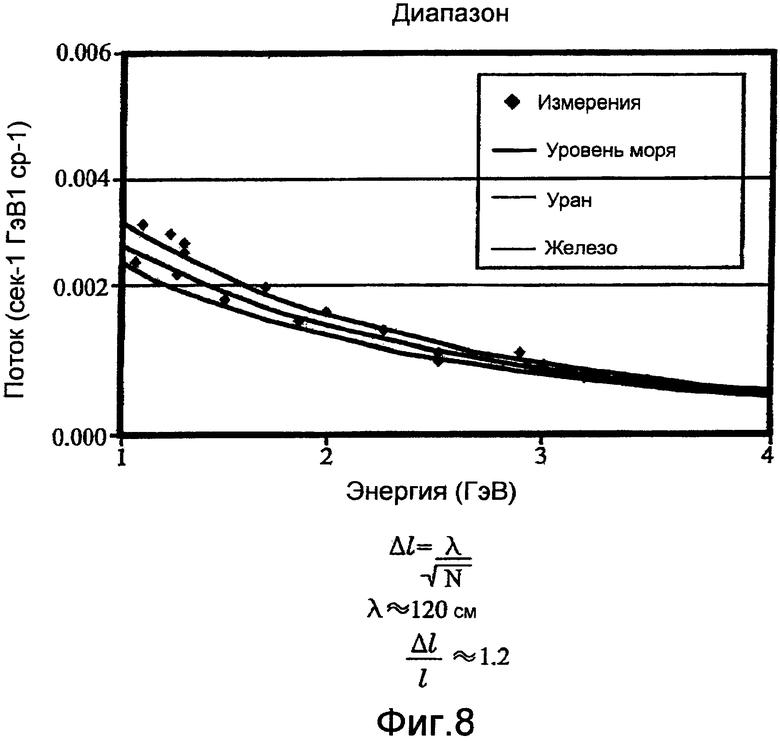
фиг. 8 и 9 - соответственно, типичные экспериментальные диапазонные данные и теоретические результаты многократного кулоновского рассеяния при измерении 1000 см2 урана в течение 1 минуты при помощи системы на космических лучах;
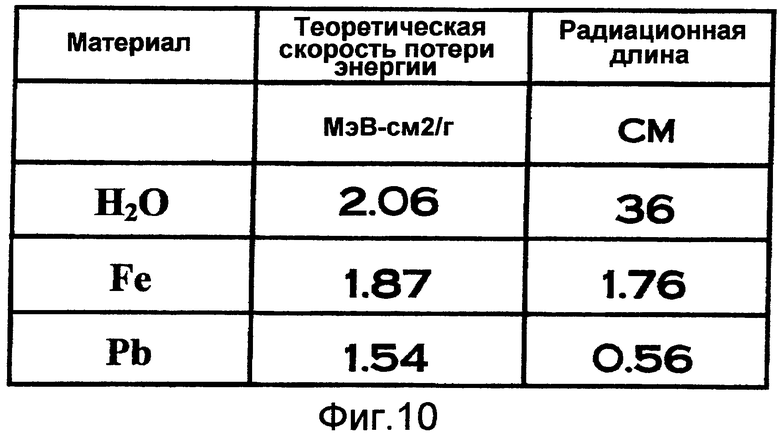
фиг. 10 - таблица, показывающая теоретическую скорость (dE/dx) потери энергии и радиационную длину (X) для разных материалов; и
фиг. 11 и 12 - портальные системы контроля, приспособленные и расположенные для контроля груза в транспортных средствах и контейнерах согласно альтернативным вариантам осуществления изобретения.
Подробное описание изобретения
Конкретные величины и конфигурации, указанные в этих не вносящих ограничений примерах, могут быть различными и приведены только для иллюстрации, по меньшей мере, одного варианта осуществления настоящего изобретения и не предназначены для ограничения объема изобретения.
Системы обнаружения частиц и способы, описанные в этой заявке, могут быть осуществлены для обнаружения присутствия некоторых объектов или материалов, таких как ядерные материалы, и для получения томографической информации о таких объектах в различных вариантах применения, включая, но не ограничиваясь этим, проверку упаковок, контейнеров, транспортных средств с пассажирами в контрольно-пропускных пунктах, пунктах пересечения границы и других местах на предмет наличия представляющих ядерную опасность объектов, которые могут включать от полностью снаряженных ядерных боеприпасов до малых количеств хорошо экранированных ядерных материалов. Признаки, описанные в этой заявке, могут использоваться для создания различных систем обнаружения частиц.
Например, система обнаружения частиц может включать зону расположения объекта для размещения проверяемого объекта, первый набор позиционно-чувствительных детекторов мю-мезонов, расположенных на первой стороне зоны расположения объекта для измерения положений и направлений бомбардирующих мю-мезонов, движущихся в зону расположения объекта, второй набор позиционно-чувствительных детекторов мю-мезонов, расположенных на второй стороне зоны расположения объекта против первой стороны, для измерения положений и направлений вылетающих мю-мезонов, выходящих из зоны расположения объекта, и блок обработки сигналов, который может включать, например, микропроцессор для приема данных сигналов измерений, относящихся к влетающим мю-мезонам, от первого набора позиционно-чувствительных детекторов мю-мезонов, и сигналов измерений, относящихся к вылетающим мю-мезонам, от второго набора позиционно-чувствительных детекторов мю-мезонов. Например, каждый из первого и второго наборов детекторов частиц может быть выполнен так, чтобы он включал пролетные (дрейдовые) трубки, приспособленные для обеспечения, по меньшей мере, трех позиционных измерений относительно заряженных частиц в первом направлении и, по меньшей мере, трех позиционных измерений относительно заряженных частиц во втором направлении, отличном от первого направления. Блок обработки сигналов конфигурирован для анализа характеристик рассеяния мю-мезонов, вызванного рассеянием мю-мезонов в материалах в пределах зоны расположения объекта, на основе измеренных положений и направлений влетающих и вылетающих мю-мезонов, для получения томографического профиля или пространственного распределения рассеивающих центров в пределах зоны расположения объекта. Полученный томографический профиль или пространственное распределение рассеивающих центров может использоваться для обнаружения присутствия или отсутствия одного или более объектов в зоне расположения объекта, таких как материалы с высокими атомными числами, включая ядерные материалы или устройства. Каждый позиционно-чувствительный детектор мю-мезонов может быть выполнен в различных конфигурациях, включая дрейфовые ячейки, такие как пролетные трубки, заполненные газом, который может быть ионизирован мю-мезонами. Такая система может применяться для использования мю-мезонов, произведенных естественными космическими лучами, как источника мю-мезонов для обнаружения одного или более объектов в зоне расположения объекта.
Как будет описано более подробно ниже, в конкретных иллюстративных вариантах осуществления изобретения, в системах обнаружения частиц могут использоваться пролетные трубки для обеспечения отслеживания заряженных частиц, таких как мю-мезоны, проходящих через объем, а также сопутствующего обнаружения нейтронных частиц. Однако специалистам в данной области техники будет понятно, что такие детекторы заряженных частиц могут использоваться в других вариантах применения, отличных от отслеживания произведенных космическими лучами заряженных частиц, для обнаружения других заряженных частиц кроме произведенных космическими лучами заряженных частиц. Эти детекторы заряженных частиц применимы для любых заряженных частиц от любого соответствующего источника. Например, мю-мезоны могут быть произведены космическими лучами или пучком мю-мезонов низкой интенсивности от ускорителя.
В вариантах применения для портального контроля, иллюстративные варианты осуществления изобретения дают подход, обеспечивающий надежное обнаружение ядерных материалов с уменьшенными затратами и с увеличенной эффективностью. Кроме того, этот подход может обеспечивать получение портального устройства контроля радиации, которое способно определять то, что данное транспортное средство или груз не представляет ядерной опасности, посредством измерения отсутствия потенциальной экранированной упаковки и отсутствия признаков радиации.
В портальных системах контроля в иллюстративных вариантах осуществления изобретения, показанных на прилагаемых чертежах, используется отслеживание произведенных космическими лучами заряженных частиц при помощи пролетных трубок. Как будет описано более подробно ниже, в портальных системах контроля используются пролетные трубки, позволяющие отслеживать заряженные частицы, такие как мю-мезоны, проходящие через объем, а также обнаруживать гамма-лучи. Предпочтительно, эти портальные системы контроля могут эффективно выполнять комбинированные функции устройства космической радиографии с пассивным или активным счетчиком гамма-излучения для получения надежного детектора ядерной опасности. Это устраняет потребность в двух отдельных инструментах.
Томография на космических лучах - это техника, в которой используется многократное кулоновское рассеяние проникающих произведенных космическими лучами мю-мезонов для выполнения неразрушающего контроля материала без использования искусственного излучения. Земля непрерывно бомбардируется энергетически устойчивыми частицами, главным образом протонами, прибывающими из дальнего космоса. Эти частицы взаимодействуют с атомами в верхних слоях атмосферы, производя ливни частиц, которые включают много короткоживущих пи-мезонов, которые разрушаются, производя более долгоживущие мю-мезоны. Мю-мезоны взаимодействуют с веществом, прежде всего, посредством кулоновской силы без ядерного взаимодействия и не так легко вызывая излучение, как электроны. Они теряют энергию медленно за счет электромагнитных взаимодействий. Следовательно, многие из производимых космическими лучами мю-мезонов достигают поверхности Земли как сильно проникающее излучение заряженных частиц. Поток мю-мезонов на уровне моря составляет приблизительно 1 мю-мезон на см2 в минуту.
Когда мю-мезон движется сквозь материал, кулоновское рассеяние зарядов субатомных частиц нарушает его траекторию. Полное отклонение зависит от нескольких свойств материала, но доминирующий эффект дает атомное число Z ядер. На траектории более сильно воздействуют материалы, которые создают хорошее экранирование гамма-излучения (например, такие как свинец и вольфрам), и специальный ядерный материал, то есть уран и плутоний, чем материалы, которые составляют более обыкновенные объекты, такие как вода, пластмассы, алюминий и сталь. Каждый мю-мезон несет информацию об объектах, через которые он проникает, и посредством измерения рассеяния множества мю-мезонов можно исследовать свойства этих объектов. Материал с высоким атомным числом Z и высокой плотностью может быть обнаружен и идентифицирован, когда материал расположен внутри материала с низким Z и средним Z.
Кулоновское рассеяние от атомных ядер приводит к очень большому количеству отклонений с малым углом заряженных частиц, когда они пересекают вещество. Энрико Ферми открыл и решил уравнение переноса, которое описывает этот процесс до хорошего приближения. Результатом явилась коррелированная гауссова функция распределения для смещения и углового изменения траектории, которое зависит от плотности и атомного заряда материала. Ширина функции распределения пропорциональна инверсии импульса частицы и квадратному корню реальной плотности материала, измеренной в радиационных длинах. Другие предпосылки можно обнаружить в публикации K.N. Borozdin и др., озаглавленной "Наблюдение: радиографическое отображение мю-мезонами космических лучей" ("Surveillance: Radiographic Imaging with Cosmic Ray Muons"), опубликованной в журнале Nature (2003), 422, 277.
Произведенные космическими лучами мю-мезоны дают информацию без дозы излучения выше фонового излучения Земли, и надлежащее обнаружение таких произведенных космическими лучами мю-мезонов может быть осуществлено таким образом, который особенно чувствителен к хорошо экранирующим материалам. Система обнаружения мю-мезонов может быть конфигурирована для выполнения томографии целевого объекта при контроле на основе рассеяния мю-мезонов целевым объектом. Система может быть конфигурирована для выполнения томографии для локализации рассеяния. Томографическое пространственное разрешение может быть выражено приблизительно следующим образом:
 - Уравнение 1
- Уравнение 1
где:
θ RMS - это среднеквадратическое значение угла рассеяния и L - это размер объема под контролем устройства обнаружения.
Например, для типичного среднеквадратичного значения угла рассеяния 0,02 радиан и размера устройства 200 см, томографическое пространственное разрешение составляет 0,02×200 см=4 см.
Согласно одному подходу, угловая разрешающая способность определена следующим уравнением, основанным на статистике Пуассона:
 - Уравнение 2
- Уравнение 2
где:
θ - это среднеквадратичное значение угла рассеяния,
N - это количество производимых космическими лучами мю-мезонов, проходящих сквозь представляющий интерес район.
Например, угловая разрешающая способность для N = 100 (соответствующая разрешаемому элементу 10×10 см2 после одной минуты счета) составляет Δθ=0,07θ.
Что касается таблицы на фиг. 10, эта таблица иллюстрирует теоретическую скорость (dE/dx) потерь энергии и радиационную длину (X) для различных материалов. Одна минута отсчета позволяет отличать куб из железа размером 10 см от куба из свинца размером 10 см при 6 стандартных отклонениях на основе их различных величин X.
Томографические способы, предназначенные для построения изображения или модели объекта на основе множественных проекций, сделанных с различных направлений, могут быть осуществлены в системе на космических лучах для получения дискретной томографической реконструкции представляющего интерес объема на основе данных, предоставляемых мю-мезонами. В некоторых вариантах применения могут использоваться способы моделирования способом Монте Карло для исследований и сокращения времени сканирования. Другие стохастические способы обработки могут также использоваться для получения томографического отображения с помощью мю-мезонов, описанного в этой заявке.
Функция радиографии на космических лучах систем обнаружения частиц, соответствующих вариантам осуществления изобретения, может быть легче понятна со ссылками на примеры систем обнаружения, приспособленных для обнаружения произведенных космическими лучами заряженных частиц, таких как показанные на фиг.4-6.
Как показано первоначально на фиг. 4, которая иллюстрирует систему обнаружения с использованием произведенных космическими лучами мю-мезонов для обнаружения объекта, система 1 включает набор из двух или больше плоскостей 3 позиционно-чувствительных детекторов 7 мю-мезонов, расположенных над объемом 5 для его отображения для определения положения и углов (то есть направлений в трехмерном пространстве) траекторий 9 влетающих мю-мезонов. Детекторы 7 мю-мезонов конфигурированы для измерения положения и углов траекторий 9 влетающих мю-мезонов относительно двух различных направлений, например, в двух ортогональных координатах по осям x и у. Мю-мезоны проходят сквозь объем 5, где может быть расположен объект 2, и рассеиваются в степени, зависящей от материала 2, находящегося в объеме, сквозь который они проходят. Другой набор из двух или больше плоскостей 4 позиционно-чувствительных детекторов 8 мю-мезонов конфигурирован для регистрации положений и направлений вылетающих мю-мезонов. Пролетные трубки в детекторах 7 и 8 расположены так, чтобы обеспечивать, по меньшей мере, три позиционных измерения относительно заряженных частиц в первом направлении и, по меньшей мере, три позиционных измерения относительно заряженных частиц во втором направлении, которое отличается от первого направления и может быть ортогональным к первому направлению. Боковые детекторы (не показаны) могут использоваться для обнаружения более горизонтально ориентированных траекторий мю-мезонов. Угол рассеивания каждого мю-мезона вычисляется на основе измерений относительно влетающих и вылетающих частиц.
Блок обработки сигналов, например, компьютер применен в системе 1 для приема данных сигналов измерений относительно влетающих мю-мезонов от детекторов 7 и вылетающих мю-мезонов от детекторов 8. Этот блок обработки сигналов конфигурирован для анализа рассеяния мю-мезонов в объеме 5 на основе измеренных положений и направлений влетающих и вылетающих мю-мезонов для получения томографического профиля или пространственного распределения плотности рассеяния, отражающей силу рассеяния или радиационную длину в пределах объема 5. Полученный томографический профиль или пространственное распределение плотности рассеяния в пределах объема 5 может показывать присутствие или отсутствие объекта 2 в объеме 5. Показанные на фиг. 4 детекторы 7 и 8 в форме пролетных трубок расположены на верхней и нижней сторонах объема 5. В некоторых вариантах выполнения дополнительные детекторы в форме пролетных трубок могут быть расположены на боковых сторонах объема 5 для формирования коробчатой или четырехсторонней структуры, в которую может помещаться упаковка, транспортное средство или грузовой контейнер для сканирования системой.
Обработка измерений для производимых космическими лучами мю-мезонов в контролируемом объеме (например, упаковке, контейнере или транспортном средстве) при помощи обрабатывающего устройства для системы 1, показанной на фиг. 4, и других систем, описанных в этой заявке, может включать реконструкцию траектории заряженной частицы, такой как мю-мезон, сквозь объем 5, измерение импульса влетающего мю-мезона на основе сигналов от детекторов 7, измерение импульса вылетающего мю-мезона на основе сигналов от детекторов 8 и определение пространственного распределения плотности рассеяния в объеме 5. Эти и другие результаты обработки могут использоваться для построения томографического профиля и измерения различных свойств объема 5.
Например, реконструкция траектории заряженной частицы, проходящей сквозь детектор, имеющий набор дрейфовых ячеек, включает: (a) получение сигналов столкновений, представляющих идентификаторы дрейфовых ячеек, с которыми сталкиваются заряженные частицы, и соответствующих моментов времени столкновений; (b) группирование одновременных столкновений с дрейфовой ячейкой, идентифицированной как связанной с траекторией конкретной заряженной частицы, прошедшей сквозь указанный детектор; (c) первоначальную оценку начала отсчета времени для момента времени, когда указанная конкретная заряженная частица столкнулась с дрейфовой ячейкой; (d) определение радиусов дрейфа на основе оценок величин начала отсчета времени, данных преобразования времени дрейфа и времени столкновения; (e) сопоставление линейных траекторий с радиусами дрейфа, соответствующими конкретной величине начала отсчета времени; и (f) поиск и отбор величины начала отсчета времени, связанной с лучшим из сопоставлений траектории, выполненных для конкретной заряженной частицы, и вычисление погрешности в параметре траектории и начале отсчета времени. Такая реконструкция траектории на основе сопоставления начала отсчета времени дает реконструированную линейную траекторию заряженной частицы, проходящей сквозь детектор заряженных частиц, без необходимости использовать быстродействующие детекторы (такие как фотоумножители со сцинтилляционными пластинами) или какой-либо другой быстродействующий детектор, который обнаруживает прохождение мю-мезона сквозь устройство в пределах нескольких наносекунд для обеспечения начала отсчета времени.
Также, например, обработка для измерения импульса влетающего или вылетающего мю-мезона на основе сигналов от детекторов может включать, например: (a) конфигурирование множества детекторов с пространственной чувствительностью к рассеянию заряженных частиц, проходящих сквозь них; (b) измерение рассеяния заряженных частиц в детекторах с пространственной чувствительностью, причем измерение рассеяния содержит получение, по меньшей мере, трех позиционных измерений рассеивающихся заряженных частиц; (c) определение, по меньшей мере, одной траектории заряженной частицы на основе позиционных измерений; и (d) определение, по меньшей мере, одного результата измерения импульса заряженной частицы, по меньшей мере, по одной траектории. Эта технология может использоваться для определения импульса заряженной частицы на основе траектории заряженной частицы, которая определена по рассеянию заряженных частиц в детекторах с пространственной чувствительностью непосредственно без использования дополнительных металлических пластин в детекторе.
Также, например, пространственное распределение плотности рассеяния объема может быть определено на основе томографических данных относительно заряженной частицы посредством: (a) получения заданных данных томографии заряженной частицы, соответствующих углам рассеивания и оцененному импульсу заряженных частиц, проходящих сквозь объем объекта; (b) получения распределения вероятностей рассеивания заряженных частиц для использования в алгоритме максимизации ожидания, причем распределение вероятностей основано на статистической модели многократного рассеяния; (c) определения по существу максимальной оценки правдоподобия объемной плотности объекта с использованием алгоритма максимизации ожидания; и (d) выдачи реконструированной плотности объемного рассеяния объекта. Реконструированная плотность объемного рассеяния объекта может использоваться для идентификации присутствия и/или типа объекта, занимающего представляющий интерес объем относительно реконструированного профиля объемной плотности. Различные варианты применения включают томографию произведенными космическими лучами мю-мезонами для различных вариантов применения в интересах национальной безопасности, в которых транспортные средства или грузы могут сканироваться устройством отслеживания траекторий мю-мезонов.
Томографическая обрабатывающая часть устройства обработки сигналов может быть выполнена в компьютере в том же месте, что и детекторы 7 и 8. В альтернативном варианте, томографическая обрабатывающая часть устройства обработки сигналов может быть выполнена в удаленном компьютере, который соединен компьютерной сетью, такой как частная сеть или сеть общего пользования, такая как Интернет.
Таким образом, многократное рассеяние произведенных космическими лучами мю-мезонов может использоваться для выборочного обнаружения материала с высоким атомным числом на фоне нормального груза. Предпочтительно, эта техника пассивна, не выдает какой-либо дозы облучения выше фона и избирательна относительно материалов с высоким атомным числом.
Как показано на фиг. 5, которая иллюстрирует вид сбоку другой системы обнаружения с использованием космических лучей для обнаружения объекта, система 100 имеет две плоскости 103 детекторов 107 мю-мезонов, расположенные над пробой 109, и две плоскости 104 детекторов 108 мю-мезонов, расположенные под пробой 109. В системе 100 плоскости детекторов мю-мезонов отделены интервалами, составляющими 27 см.
На фиг. 6 показан подробный вид в перспективе другого детектора 200 заряженных частиц, в котором детекторы 203 с пространственной чувствительностью расположены над плоскостью 211 держателя пробы, и детекторы 203 с пространственной чувствительностью расположены под плоскостью 211 держателя пробы. Каждый набор детекторов с пространственной чувствительностью содержит первый двойной слой 220 пролетных трубок 204, расположенных в направлении X, и второй двойной слой 221 пролетных трубок 204, расположенных в направлении Y. В каждом из слоев 220, 221 пролетные трубки 204 расположены двумя рядами, смещенными на половину диаметра трубки друг от друга.
Модули 204 пролетных трубок действуют для обнаружения как произведенных космическими лучами мю-мезонов, так и гамма-лучей. В системе, показанной на фиг. 6, модули пролетных трубок представляют собой алюминиевые пролетные трубки длиной 12 футов (3,66 метров), которые конфигурированы для измерения положения и угла траекторий влетающих и вылетающих мю-мезонов в направлениях координат Х и Y. Алюминий в детекторах обеспечивает значительное количество массы, в которой гамма-лучи и быстрые электроны поглощаются или рассеиваются. Быстрые электроны, произведенные в ходе этих процессов, обнаруживаются в пролетных трубках таким же способом, которым обнаруживается большинство космических лучей высокой энергии.
Трубки могут быть расположены различными способами. Например, слои необязательно располагаются под углом 90 градусов относительно друг друга, но могут располагаться под меньшими, ненулевыми углами. Также, например, верхний слой может быть под углом 0 градусов, средний слой под углом 45 градусов относительно первого и третий слой под углом 90 градусов относительно первого. Это может позволять разрешение многих траекторий, которые возникают в один момент времени.
Также другие расположения детекторов с пространственной чувствительностью, способных рассеивать проходящие сквозь них заряженные частицы и обеспечивающих в сумме, по меньшей мере, три индивидуальных позиционных измерения, могут быть приняты вместо расположения детекторов, показанных на фиг. 6. По меньшей мере, 3 позиционных измерения требуются для получения возможности линейного сопоставления со свободным параметром, в результате чего можно отслеживать частицу.
Теперь будет описан один пример электроники 212 для сбора информации, в рабочем положении соединенной с пролетными трубками. Пролетные трубки системы 200 обнаружения, показанной на фиг. 6, соединены с соответствующими электронными усилителями (не показаны), которые увеличивают напряжение выделенного сигнала (связанного с произведенным космическими лучами мю-мезоном, проходящим сквозь пролетную трубку). Для каждого дрейфового канала усиленный сигнал превращается в цифровой сигнал элементом электроники, называемым дискриминатором (включен, если есть столкновение, выключен, если нет столкновения), который сохраняет точное время столкновения. Эта комбинация усилителя и дискриминатора представляет собой "входную" электронику. Время и номер канала, с которыми цифровой сигнал зарегистрирован в ближайшую наносекунду аналого-цифровым преобразователем времени, упомянуты выше. Каждая пролетная трубка имеет ее собственную входную электронику и аналого-цифровой преобразователь времени.
Входная электроника построена с использованием аппаратного обеспечения, составленного имеющимися в наличии изделиями. Аналого-цифровой преобразователь времени представляет собой изделие, имеющееся в наличии, и элементы изготовлены корпорацией Caen в Италии. Каждый аналого-цифровой преобразователь времени (Caen 767B) имеет способность обеспечивать 128 входных каналов (пролетных трубок в нашем случае) и будет сохранять время столкновений в цифровой форме. Эти элементы имеют буфер, который может содержать данные приблизительно о 32000 столкновений. Аналого-цифровые преобразователи времени считываются приблизительно 5 раз в секунду таможенной системой сбора данных. Аналого-цифровые преобразователи времени установлены в крейте Versa Module Eurocard VME с контроллером SIS 1100, производимым Struck Innovative Systeme GmbH, которая производит интерфейс компьютера. Система сбора данных работает в персональном компьютере с оптическим кабелем для связи с помощью интерфейса с контроллером SIS 1100 для подачи команд аналого-цифровому преобразователю времени для передачи данных. Когда моменты времени столкновений и номера канала считываются в память персонального компьютера, необработанные данные сохраняются на накопителе на жестких дисках, но данные также обрабатываются для идентификации событий прохождения космических лучей. Данные траектории и относящиеся к делу диагностические данные также сохраняются на накопителе на жестких дисках. Обработка измерений для производимых космическими лучами мю-мезонов в контролируемом объеме (например, упаковке, контейнере или транспортном средстве) блоком сбора информации системы, показанной на фиг. 6, или другим связанным с ним устройством обработки сигналов может быть подобной описанным выше для системы, показанной на фиг. 4. Например, измерения при обработке могут обеспечивать реконструкцию траектории мю-мезона сквозь объем, измерение импульса влетающего мю-мезона на основе сигналов от детекторов, измерение импульса вылетающего мю-мезона на основе сигналов от детекторов и определение пространственного распределения плотности рассеяния в объеме.
Предпочтительно, система 200 может выборочно обнаруживать экранирование высокой плотности радиоактивного материала, занимающего объем, на основе многократного рассеяния производимых космическими лучами мю-мезонов также при подсчете гамма-лучей, испускаемых от радиоактивного материала. В дополнение к обнаружению материалов высокой плотности, таких как свинец, золото, вольфрам, уран и плутоний, система может использоваться для обнаружения материалов средней плотности, таких как сталь, железо и медь, и также материалов низкой плотности, таких как вода, пластмасса, бетон и алюминий, хотя с несколько более низкой точностью, чем относительно материалов высокой плотности.
На фиг. 7 показан вид в сечении части типичного модуля 204 пролетной трубки. Модуль пролетной трубки в этом конкретном примере цилиндрический и заполнен детекторным газом, таким как аргон-изобутан 230, для обеспечения обнаружения произведенных космическими лучами заряженных частиц, таких как мю-мезоны. Система конфигурирована для приложения положительного высокого напряжения, составляющего приблизительно +2-3 кВ, к центральному анодному проводу 231, проходящему по длине цилиндрической трубки с трубкой в состоянии заземления таким образом, что статическое поле высокого напряжения также присутствует. Когда заряженная частица взаимодействует с атомами газа, много электронов 233 высвобождаются из этих атомов на пути по прямой траектории заряженной частицы сквозь хорду трубки. Статическое поле вызывает дрейф "цепочки" электронов к положительно заряженному анодному проводу, что считывается с помощью электроники аналого-цифровым преобразователем времени электроники 212 сбора данных.
Хотя в пролетной трубке в варианте конструкции, показанном на фиг. 7, детекторный газ 230 представляет собой смесь аргона и изобутана, другими рабочими газовыми смесями могут быть смеси аргона и двуокиси углерода или аргона, изобутана и двуокиси углерода, и он может включать углеводороды, такие как метан, пропан, пентан и т.п. Пример рабочей газовой смеси представляет собой 10% метана и 90% аргона. Кроме того, в альтернативном варианте в качестве рабочего газа могут использоваться невоспламеняемые газовые смеси, такие как смесь аргона, двуокиси углерода и тетрафторметана (CF4). Кроме того, в газовых смесях могут быть приняты этан или другие газы. Например, смесь 5% этана, 45% CF4 и 50% аргона представляет собой пригодный невоспламеняемый рабочий газ. В газовой смеси могут использоваться другие инертные газы кроме аргона.
Кроме того, хотя пролетная трубка, показанная на фиг. 7, изготовлена из алюминия, вместо алюминия могут быть приняты другие материалы, такие как углеродные композиты с внутренними проводящими покрытиями. Пролетные трубки могут не иметь круглые сечения. Например, пролетные трубки могут быть выполнены из алюминиевых экструдированных профилей с различными некруглыми сечениями.
В альтернативном варианте могут быть приняты другие ячейки кроме пролетных трубок, например, такие как дрейфовые ячейки треугольной формы.
На фиг. 8 и 9, соответственно, показаны типичные экспериментальные диапазонные данные и теоретические результаты многократного кулоновского рассеяния при измерении для 1000 см3 урана в течение 1 минуты с системой обнаружения произведенных космическими лучами мю-мезонов. Эти измерения и вычисления демонстрируют то, что томография заряженной частицы (мю-мезона) намного более чувствительна, чем диапазонная радиография, ранее использованная при поиске скрытых камер в египетских пирамидах и измерении геологических покрывающих пластов.
На фиг. 11 показана система 300 обнаружения частиц, приспособленная и устроенная для контроля грузов в транспортных средствах и контейнерах в портах и пунктах пересечения границы согласно одному варианту осуществления изобретения. Как будет описано более подробно ниже, в системе 300 обнаружения частиц используется система томографии мю-мезонов с множеством детекторных пролетных трубок 303, конфигурированных для отслеживания произведенных космическими лучами мю-мезонов 304, рассеянных грузом или содержимым транспортного средства 306, занимающим объем 306, и конфигурированных для одновременного обнаружения любых нейтронов 314, испускаемых содержимым транспортного средства. Система 300 может использоваться для контроля занимаемых людьми транспортных средств в пунктах пересечения границы на предмет представляющих ядерную опасность объектов, которые могут представлять собой от полностью снаряженного ядерного оружия до малых количеств хорошо экранированных ядерных материалов. Система 300 может использоваться для пропуска безвредных транспортных средств менее чем через 30 секунд, обнаружения нескольких килограммов высокообогащенного урана (экранированного или неэкранированного) менее чем за 60 секунд, и обнаружения плутония или ядерных устройств (экранированных или неэкранированных) из высокообогащенного урана менее чем за 60 секунд.
Предпочтительно, использование пролетных трубок 303 для пассивного отсчета гамма-излучения 312, испускаемого транспортным средством 306, и отслеживания рассеянных произведенных космическими лучами заряженных частиц 304 позволяет системе выполнять пассивное сканирование занимаемых пассажирами транспортных средств с кратким временем сканирования и без доз излучения.
Способ действия системы 300 обнаружения частиц (такой как портальная система контроля), показанной на фиг. 11, согласно одному варианту конструкции включает обнаружение при помощи пролетных трубок 303 влетающих и вылетающих произведенных космическими лучами заряженных частиц 304 вместе с любыми гамма-лучами 312. Многократное рассеяние заряженных частиц тогда вычисляется для выборочного обнаружения материала, в частности, материала высокой плотности, находящегося в объеме 305. Гамма-лучи 312, испускаемые от объема, могут быть подсчитаны электроникой сбора данных для определения того, находится ли какой-либо радиоактивный источник в объеме 305.
В альтернативном варианте осуществления изобретения получена портальная система контроля (не показана), которая идентична портальной системе 300 контроля, показанной на фиг. 11, за исключением того, что система также включает источник гамма-лучей или нейтронов в пределах устройства для обеспечения активного, а не только пассивного обследования транспортного средства и, таким образом, получения обнаружимого увеличения скорости счета гамма-лучей.
Система обнаружения частиц (например, портальная система контроля) согласно другому альтернативному варианту осуществления изобретения показана на фиг. 12. Система 400 подобна системе 300, показанной на фиг. 11, в том, что она конфигурирована и для пассивного счета гамма-излучения, испускаемого от транспортного средства, и отслеживания рассеянных произведенных космическими лучами заряженных частиц 404. Группы 403 детекторов в форме пролетных трубок имеют длину 16 футов (4,88 метров) для получения возможности обследования грузовика 405, но могут иметь другие длины, зависящие от сканируемого объекта. Для получения больших выходных темпов пространственный угол может быть увеличен посредством пополнения детекторных пролетных трубок 403. Кроме того, система конфигурирована для использования остаточных участков 404B слежения для измерений импульса.
В другом альтернативном варианте осуществления изобретения портальная система контроля, которая идентична системе 300, показанной на фиг. 11, имеет пролетные трубки, которые дополнительно уплотнены для уменьшения стоимости и сложности системы благодаря устранению потребности в системе газоснабжения.
Вышеупомянутые иллюстративные варианты осуществления изобретения показывают, что комбинация радиографии на космических лучах с пассивным или активным подсчетом, таким образом, обеспечивает получение надежного детектора ядерной опасности. Только обычная радиография не эффективна в отношении упаковок с ядерным материалом, которые слишком малы для обнаружения радиографией. Пассивный подсчет может быть неэффективным из-за экранирования материала материалом с высоким атомным числом. Экранирование делает опасные материалы видимыми при помощи радиографии, и рассеяние материалом во многих случаях усиливает пассивные признаки. Комбинирование этих способов позволяет определять то, что данное транспортное средство не содержит опасных материалов, посредством измерения на предмет отсутствия потенциальной экранированной упаковки и отсутствия признаков радиации.
Описанные здесь варианты осуществления изобретения и примеры представлены для лучшего пояснения настоящего изобретения и его практического применения и, таким образом, предоставления возможности специалистам в данной области техники осуществлять и использовать изобретение. Однако специалистам в данной области техники будет понятно, что предшествующее описание и примеры были представлены только для иллюстрации и примера.
Другие варианты и модификации настоящего изобретения будут очевидны для специалистов в данной области техники, и такие варианты и модификации охвачены прилагаемой формулой изобретения.
Изложенное описание не предусмотрено как исчерпывающее или ограничивающее объем изобретения. Многие модификации и варианты возможны в свете вышеупомянутого описания без отхода от объема нижеследующей формулы изобретения. Предусматривается, что использование настоящего изобретения может включать компоненты, имеющие другие характеристики. Предусматривается, что объем настоящего изобретения определен прилагаемой формулой изобретения, дающей полное понятие об эквивалентах во всех отношениях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОСТРОЕНИЕ ИЗОБРАЖЕНИЯ ПО ЗАРЯЖЕННЫМ ЧАСТИЦАМ, СОЗДАВАЕМЫМ КОСМИЧЕСКИМИ ЛУЧАМИ | 2009 |
|
RU2503953C2 |
| СТАТИСТИЧЕСКАЯ ТОМОГРАФИЧЕСКАЯ РЕКОНСТРУКЦИЯ НА ОСНОВЕ ИЗМЕРЕНИЙ ЗАРЯЖЕННЫХ ЧАСТИЦ | 2007 |
|
RU2468390C2 |
| СИСТЕМА ПЕРЕДВИЖНЫХ ДЕТЕКТОРОВ ЗАРЯЖЕННЫХ ЧАСТИЦ И СПОСОБЫ ВИЗУАЛИЗАЦИИ ОТРАБОТАВШЕГО ЯДЕРНОГО ТОПЛИВА | 2019 |
|
RU2806543C2 |
| ПОЗИЦИОННО-ЧУВСТВИТЕЛЬНЫЙ ДЕТЕКТОР НЕЙТРОНОВ | 2004 |
|
RU2282215C2 |
| Способ азимутального сканирования атмосферы с использованием потока мюонов космических лучей | 2023 |
|
RU2819137C1 |
| МЮОННЫЙ ГОДОСКОП И УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ ОБЪЕКТОВ | 2020 |
|
RU2761333C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ КОНТРАБАНДЫ | 2005 |
|
RU2300096C2 |
| ПОЗИЦИОННО-ЧУВСТВИТЕЛЬНЫЙ ДЕТЕКТОР МЕДЛЕННЫХ И БЫСТРЫХ НЕЙТРОНОВ | 2022 |
|
RU2788834C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И НЕРАЗРУШАЮЩЕГО АНАЛИЗА ВЕЩЕСТВ, СОДЕРЖАЩИХ ЯДРА ЛЕГКИХ ЭЛЕМЕНТОВ | 1996 |
|
RU2095796C1 |
| РЕТ-ДЕТЕКТОРНАЯ СИСТЕМА С УЛУЧШЕННЫМИ ХАРАКТЕРИСТИКАМИ КОЛИЧЕСТВЕННОЙ ОЦЕНКИ | 2010 |
|
RU2543544C2 |






Изобретения относятся к областям обнаружения частиц, анализа, контроля и, более конкретно, к безопасности и портальным системам и способам контроля. Сущность изобретения заключается в том, что в одном варианте выполнения система текущего контроля имеет систему отслеживания произведенных космическими лучами заряженных частиц с множеством дрейфовых ячеек. Дрейфовые ячейки, которые могут быть, например, алюминиевыми пролетными трубками, могут быть расположены, по меньшей мере, над и под контролируемым объемом для, таким образом, отслеживания влетающих и вылетающих заряженных частиц, таких как производимые космическими лучами мю-мезоны, при обнаружении также гамма-лучей. Система может выборочно обнаруживать устройства или материалы, такие как железо, свинец, золото и/или вольфрам, находящиеся в объеме, на основе многократного рассеяния заряженных частиц, проходящих сквозь объем, и может также обнаруживать любые радиоактивные источники, находящиеся в объеме, на основе испускаемых ими гамма-лучей. Дополнительно, пролетные трубки могут быть герметизированы для устранения потребности в системе газоснабжения. Технический результат - повышение эффективности обнаружения ядерных материалов. 3 н. и 24 з.п. ф-лы, 12 ил.
1. Система контроля, содержащая
устройство отслеживания произведенных космическими лучами заряженных частиц, имеющая множество детекторов заряженных частиц, причем указанные детекторы заряженных частиц содержат дрейфовые ячейки, выполненные с возможностью как обеспечения отслеживания влетающих и вылетающих заряженных частиц, проходящих сквозь контролируемый объем, так и обнаружения гамма-лучей, причем при использовании указанная система может как выборочно обнаруживать любые материалы или устройства, находящиеся в указанном объеме, на основе многократного рассеяния указанных заряженных частиц, так и обнаруживать любые радиоактивные источники, находящиеся в указанном объеме, на основе испускаемых от них гамма-лучей.
2. Система по п.1, в которой указанные дрейфовые ячейки содержат дрейфовые трубки круглого или некруглого сечения или нетрубчатые ячейки.
3. Система по п.1, в которой указанные дрейфовые ячейки содержат герметизированные дрейфовые ячейки.
4. Система по п.1, в которой рабочий газ в указанных дрейфовых ячейках содержит невоспламеняемый газ.
5. Система по п.1, в которой указанные дрейфовые ячейки содержат набор дрейфовых трубок, расположенных над указанным объемом, и другой набор дрейфовых трубок, расположенных под указанным объемом, причем каждый набор дрейфовых трубок имеет, по меньшей мере, три дрейфовые трубки, расположенные в первом направлении, и другие, по меньшей мере, три дрейфовые трубки, расположенные во втором направлении.
6. Система по п.5, в которой указанное первое направление является, по существу, ортогональным к указанному второму направлению.
7. Система по п.6, в которой указанные заряженные частицы содержат мю-мезоны.
8. Система по п.1, в которой указанные дрейфовые ячейки расположены так, чтобы обеспечивать, по меньшей мере, три позиционных измерения относительно заряженных частиц в первом направлении и, по меньшей мере, три позиционных измерения относительно заряженных частиц во втором направлении, отличном от указанного первого направления.
9. Система по п.1, также содержащая источник гамма-лучей или нейтронов, расположенный в пределах указанной системы, для обеспечения, таким образом, активного исследования материала, находящегося в указанном объеме.
10. Система контроля, содержащая
томографическую систему произведенных космическими лучами мю-мезонов, имеющую множество детекторов мю-мезонов, причем указанные детекторы содержат дрейфовые ячейки, расположенные, по меньшей мере, над и под контролируемым объемом как для обеспечения отслеживания влетающих и вылетающих мю-мезонов, так и для подсчета гамма-лучей, и при этом при использовании указанная система может и выборочно обнаруживать любое экранирование высокой плотности, находящееся в указанном объеме, на основе многократного рассеяния указанных мю-мезонов, проходящих сквозь указанный объем, и обнаруживать любой радиоактивный материал, находящийся в указанном объеме, на основе испускаемых им гамма-лучей.
11. Система по п.10, в которой указанные дрейфовые ячейки содержат алюминиевые дрейфовые ячейки или дрейфовые ячейки из углеродного композита, имеющие внутренние проводящие покрытия, и при этом указанные дрейфовые ячейки содержат дрейфовые трубки круглого или некруглого сечения или нетрубчатые ячейки.
12. Система по п.11, в которой указанный рабочий газ в указанной дрейфовой трубке содержит невоспламеняемый газ.
13. Система по п.11, в которой указанный рабочий газ содержит смесь аргона и, по меньшей мере, одного газа, отобранного из группы, состоящей из двуокиси углерода, изобутана, тетрафторметана и этана.
14. Система по п.11, в которой указанные дрейфовые трубки расположены в отдельных плоскостях в двух ортогональных координатах, или при этом указанные дрейфовые трубки расположены в неортогональных плоскостях.
15. Система по п.10, в которой указанный объем имеет достаточный размер для расположения транспортного средства или грузового контейнера для помещения в указанный объем.
16. Способ контроля, содержащий
подготовку множества дрейфовых ячеек на противоположных сторонах контролируемого объема;
обнаружение при помощи указанных дрейфовых ячеек влетающих и вылетающих произведенных космическими лучами заряженных частиц и любых гамма-лучей;
выборочное обнаружение любого материала, находящегося в указанном объеме, на основе многократного рассеяния указанных заряженных частиц, проходящих сквозь указанный объем; и
обнаружение любых радиоактивных источников, находящихся в указанном объеме, при помощи обнаружения указанных гамма-лучей.
17. Способ по п.16, в котором указанные дрейфовые ячейки содержат дрейфовые трубки круглого или некруглого сечения или нетрубчатые ячейки.
18. Способ по п.17, в котором указанные дрейфовые ячейки содержат герметизированные дрейфовые трубки.
19. Способ по п.17, в котором расположение указанного множества дрейфовых ячеек содержит расположение набора из, по меньшей мере, трех плоскостей дрейфовых трубок над указанным объемом и расположение набора из, по меньшей мере, трех плоскостей дрейфовых трубок под указанным объемом.
20. Способ по п.16, в котором расположение указанного множества дрейфовых ячеек дополнительно содержит расположение указанных дрейфовых трубок в отдельных плоскостях в двух ортогональных координатах или расположение указанных дрейфовых трубок в неортогональных плоскостях.
21. Система обнаружения частиц, содержащая
первый набор позиционно-чувствительных детекторов заряженных частиц, расположенных на первой стороне зоны расположения объекта, для измерения положений и направлений бомбардирующих заряженных частиц, направляющихся к зоне расположения объекта;
второй набор позиционно-чувствительных детекторов заряженных частиц, расположенных на второй стороне зоны расположения объекта, противоположной первой стороне, для измерения положений и направлений вылетающих заряженных частиц, выходящих из зоны расположения объекта; и
блок обработки сигналов для приема данных сигналов измерений влетающих заряженных частиц от первого набора позиционно-чувствительных детекторов заряженных частиц и сигналов измерений вылетающих заряженных частиц от второго набора позиционно-чувствительных детекторов заряженных частиц, при этом блок обработки сигналов конфигурирован для анализа рассеяния заряженных частиц в материалах в пределах зоны расположения объекта на основе измеренных входных и выходных положений и направлений заряженных частиц для получения томографического профиля или пространственного распределения рассеивающих центров в пределах зоны расположения объекта;
при этом каждый набор позиционно-чувствительных детекторов заряженных частиц включает в себя первые дрейфовые трубки, расположенные в направлении Х, и вторые дрейфовые трубки, расположенные в направлении Y.
22. Система по п.21, в которой дрейфовые ячейки расположены для обеспечения, по меньшей мере, трех позиционных измерений заряженных частиц в первом направлении и, по меньшей мере, трех позиционных измерений заряженных частиц во втором направлении, отличном от первого направления.
23. Система по п.21, в которой дрейфовые ячейки выполнены и расположены на окружающих сторонах зоны расположения объекта так, что они формируют коробчатую или четырехстороннюю структуру.
24. Система по п.21, в которой блок обработки сигналов выполнен с возможностью реконструкции траектории заряженной частицы, проходящей сквозь зону расположения объекта, измерения импульса влетающей заряженной частицы на основе сигналов от первого набора позиционно-чувствительных детекторов заряженных частиц, измерения импульса влетающей заряженной частицы на основе сигналов от второго набора позиционно-чувствительных детекторов заряженных частиц и получения пространственного распределения плотности рассеяния в зоне расположения объекта.
25. Система по п.21, в которой блок обработки сигналов включает в себя механизм для использования плотности рассеяния для идентификации одного или обоих из присутствия и типа объекта в зоне расположения объекта.
26. Система по п.21, в которой каждый позиционно-чувствительный детектор заряженных частиц структурирован для детектирования и космических лучей, производящих мю-мезоны, и гамма-лучей.
| BOROZDIN K | |||
| ЕТ AL | |||
| "COSMIC-RAY MUON | |||
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
| ЕТ AL | |||
| "DO FORWARD-ANGLE MUON | |||
| TRACKING DETECTOR AND ITS GAS SYSTEM" (IEEE TRANSACTIONS ON NUCLEAR SCIENCE, JUNE 2002, | |||

