Притязание на приоритет
По этому патентному документу испрашивается приоритет предварительной заявки №61/092372 на патент США под названием “Imaging based on cosmic-ray produced charged particles”, поданной 27 августа 2008 года и предварительной заявки №61/145091 на патент США под названием “Tomographic imaging using energy loss of cosmic-ray produced charged particles”, поданной 15 января 2009 года, и они обе присоединены в качестве части этого документа путем ссылки.
Уровень техники
Этот патентный документ относится к обнаружению космического излучения и построению изображения по заряженным частицам, создаваемым космическими лучами.
Томография на основе космических лучей является способом, в котором многократное кулоновское рассеяние заряженных частиц (например, мюонов), создаваемых космическими лучами, используют для выполнения безопасного досмотра материала без применения искусственного излучения. Земля непрерывно бомбардируется стабильными частицами высокой энергии, преимущественно протонами, приходящими из глубокого космического пространства. Эти частицы взаимодействуют с атомами в верхних слоях атмосферы с образованием ливней частиц, которые включают в себя многочисленные короткоживущие пионы, которые распадаются, образуя долгоживущие мюоны. Мюоны взаимодействуют с веществом в основном вследствие кулоновской силы без ядерного взаимодействия, и излучение явно намного меньше, чем электронов. Такие частицы, создаваемые космическими лучами, медленно теряют энергию вследствие электромагнитных взаимодействий. Следовательно, многие из создаваемых космическими лучами мюонов достигают земной поверхности в виде сильно проникающих заряженных частиц. Поток мюонов на уровне моря составляет около 1 мюона на квадратный сантиметр в минуту. Кроме того, на уровне моря существует поток создаваемых космическими излучениями электронов вследствие образования дельта-лучей (выбивания электронов), тормозного излучения или распада частиц в наведенных космическими лучами ливней. Поток электронов на уровне моря составляет около 1 электрона на квадратный сантиметр за 3 минуты.
Когда заряженная частица, такая как мюон, перемещается сквозь материал, кулоновское рассеяние зарядов субатомных частиц возмущает ее траекторию. Полное отклонение зависит от нескольких свойств материала, но преобладающее влияние имеет атомный номер Z ядер. На траектории заряженных частиц (например, мюонов) более сильно влияют материалы, которые хорошо экранируют гамма-излучение, такие как свинец и вольфрам, и специальные ядерные материалы (СЯМ), такие как уран и плутоний, чем материалы, которые образуют более обычные объекты, такие как вода, пластик, алюминий и сталь. Каждая заряженная частица (например, мюон) несет информацию об объектах, сквозь которые она проникает. Рассеяние многочисленных заряженных частиц (например, мюонов) может быть измерено и обработано для исследования свойств этих объектов. Материал с большим атомным номером Z и высокой плотностью может быть обнаружен и идентифицирован, когда материал расположен внутри вещества с малым Z и средним Z.
Кулоновское рассеяние из атомных ядер в веществе приводит к очень большому количеству малоугловых отклонений заряженных частиц, когда они проходят сквозь вещество. Функцию коррелированного распределения можно использовать для приближенного описания смещения и углового изменения траектории, которая зависит от плотности и атомного заряда материала. Для примера, эту функцию распределения можно аппроксимировать гауссовым распределением. Ширина функции распределения пропорциональна обратной величине количества движения частицы и корню квадратному из реальной плотности материала, измеряемой на радиационных длинах. Функция коррелированного распределения создаваемых космическими лучами заряженных частиц (например, мюонов) может дать информацию относительно материалов на путях заряженных частиц без дозы излучения сверх земного фона, и надлежащее обнаружение таких создаваемых космическими лучами заряженных частиц (например, мюонов) можно выполнять способом, который является особенно чувствительным для обнаружения выбранных материалов, таких как хорошо экранирующие излучение материалы.
Томографическая система обнаружения заряженных частиц, например томографическая система обнаружения мюонов, может быть выполнена с возможностью выполнения томографии целевого объекта при досмотре на основании рассеяния заряженных частиц целевым объектом и может использоваться в качестве портального монитора на различных местах, таких как пограничные переходные пункты, порты, контрольные пункты на дорогах и другие пункты проверки безопасности, для обнаружения определенных целевых объектов, таких как контрабандные ядерные материалы, ядерное и обычное оружие и другая контрабанда. Томографические системы обнаружения заряженных частиц можно использовать совместно с другими детекторами ядерных материалов, такими как детекторы гамма- или рентгеновского излучения, или в качестве альтернативного решения. Детекторы гамма- и рентгеновского излучения работают при направлении гамма- и рентгеновского излучения к цели и измерении проникшего гамма- и рентгеновского излучения. Экранирование ядерных материалов может снижать скорости счета в детекторах гамма- и рентгеновского излучения и ухудшать характеристику обнаружения детекторов гамма- и рентгеновского излучения. Томографические системы обнаружения заряженных частиц могут быть выполнены с возможностью обнаружения экранированных ядерных материалов и объектов.
Краткое изложение
В этом документе предлагаются способы, установки и системы для получения томографических изображений представляющего интерес объема путем использования томографических систем обнаружения заряженных частиц.
Согласно одному аспекту способ контролирования объема, подвергаемого воздействию заряженных частиц, включает в себя измерение потери энергии заряженных частиц, которые входят и проникают сквозь объем или останавливаются внутри объема без проникновения сквозь объем; на основании измеряемой потери энергии определение пространственного распределения заряженных частиц, которые входят и проникают сквозь объем или останавливаются внутри объема без проникновения сквозь объем; и использование пространственного распределения потери энергии заряженных частиц для восстановления трехмерного распределения материалов в досматриваемом объеме.
Согласно другому аспекту предложена томографическая система досмотра, включающая в себя первый набор позиционно-чувствительных детекторов, расположенных на первой стороне участка размещения объекта, для измерения положений и направлений падающих заряженных частиц, входящих на участок размещения объекта; второй набор позиционно-чувствительных детекторов, расположенных на второй стороне участка размещения объекта, противоположной первой стороне, для измерения положений и направлений вылетающих заряженных частиц, выходящих с участка размещения объекта, или отсутствия заряженных частиц, которые остановились в объеме; и блок обработки сигналов для приема данных об измеренных сигналах от влетающих заряженных частиц из первого набора позиционно-чувствительных детекторов и измеренных сигналах от вылетающих заряженных частиц из второго набора позиционно-чувствительных детекторов. Блок обработки сигналов выполнен с возможностью анализа поведения заряженных частиц, обусловленных взаимодействиями с материалами в пределах участка размещения объекта, на основании измеренных входных и выходных положений и направлений заряженных частиц, чтобы получать томографический профиль или пространственное распределение материалов в пределах участка размещения объекта. Блок обработки сигналов является функционирующим для измерения потери энергии заряженных частиц, которые входят в объем и проникают сквозь объем, и заряженных частиц, которые останавливаются внутри объема без проникновения сквозь объем, определения пространственного распределения заряженных частиц, которые входят в объем и проникают сквозь объем, и заряженных частиц, которые останавливаются внутри объема без проникновения сквозь объем; и на основании измеренной потери энергии, при использовании пространственного распределения, для восстановления пространственного распределения материалов в пределах досматриваемого объема.
Согласно еще одному аспекту предложен способ контролирования объема, подвергаемого воздействию заряженных частиц, включающий в себя использование первого набора позиционно-чувствительных детекторов, расположенных на первой стороне объема, для измерения положений и направлений падающих заряженных частиц, которые проникают сквозь первый набор позиционно-чувствительных детекторов, чтобы войти в объем; использование второго набора позиционно-чувствительных детекторов, расположенных на второй стороне объема, противоположной первой стороне, для измерения положений и направлений вылетающих заряженных частиц, выходящих из объема, или отсутствия их; использование измерений, выполненных вторым набором позиционно-чувствительных детекторов, для определения падающих заряженных частиц, которые входят в объем и проникают сквозь объем, и заряженных частиц, которые не проникают сквозь объем, чтобы достичь второго набора позиционно-чувствительных детекторов; определение потери энергии заряженных частиц, которые входят в объем и проникают сквозь объем, и заряженных частиц, которые останавливаются внутри объема без проникновения сквозь объем; определение пространственного распределения заряженных частиц, которые входят в объем и останавливаются внутри объема без проникновения сквозь объем, на основании измеренной потери энергии; и использование пространственного распределения заряженных частиц, которые входят в объем и останавливаются внутри, для восстановления пространственного распределения материалов в досматриваемом объеме.
Согласно еще одному аспекту предложен способ контролирования объема, подвергаемого воздействию заряженных частиц, включающий в себя измерение потери энергии заряженных частиц, которые входят в объем и останавливаются внутри объема без проникновения сквозь объем; на основании измеренной потери энергии определение пространственного распределения заряженных частиц, которые входят в объем и останавливаются внутри объема без проникновения сквозь объем; и использование пространственного распределения для восстановления трехмерного пространственного распределения материалов в объеме согласно их соответствующим плотностям и атомным номерам. На основании этого пространственного распределения можно обнаруживать объекты в соответствии с их атомными номерами и плотностями.
Согласно еще одному аспекту предложен способ контролирования объема, подвергаемого воздействию заряженных частиц, включающий в себя измерение потери энергии заряженных частиц, которые входят в объем и останавливаются внутри объема без проникновения сквозь объем; на основании измеренной потери энергии определение пространственного распределения заряженных частиц, которые входят в объем и останавливаются внутри объема без проникновения сквозь объем; и использование пространственного распределения для обнаружения присутствия одного или нескольких материалов низкой плотности с малыми атомными номерами.
Согласно еще одному аспекту предложена томографическая система досмотра, включающая в себя первый набор позиционно-чувствительных детекторов, расположенных на первой стороне участка размещения объекта, для измерения положений и направлений падающих заряженных частиц относительно участка размещения объекта; второй набор позиционно-чувствительных детекторов, расположенных на второй стороне участка размещения объекта, противоположной первой стороне, для измерения положений и направлений вылетающих заряженных частиц, выходящих с участка размещения объекта; и блок обработки сигналов для приема данных об измеренных сигналах от падающих заряженных частиц из первого набора позиционно-чувствительных детекторов и измеренных сигналах от вылетающих заряженных частиц из второго набора позиционно-чувствительных детекторов. Блок обработки сигналов выполнен с возможностью анализа связанного с рассеянием поведения заряженных частиц, обусловленных рассеянием заряженных частиц в материалах в пределах участка размещения объекта, на основании измеренных входных и выходных положений и направлений заряженных частиц, чтобы получать томографический профиль или пространственное распределение центров рассеяния в пределах участка размещения объекта. Блок обработки сигналов является функционирующим для измерения потери энергии заряженных частиц, которые входят в объем и тормозятся внутри объема без проникновения сквозь объем, определения пространственного распределения заряженных частиц, которые входят в объем и останавливаются внутри объема без проникновения сквозь объем, на основании измеренной потери энергии, и использования пространственного распределения для восстановления трехмерного пространственного распределения материалов в объеме в соответствии с их плотностями и атомными номерами. На основании этого пространственного распределения объекты могут быть обнаружены в соответствии с их атомными номерами и плотностями. В одном осуществлении это можно использовать для обнаружения присутствия одного или нескольких материалов низкой плотности с малыми атомными номерами.
Согласно еще одному аспекту способ контролирования объема, подвергаемого воздействию заряженных частиц, включает в себя использование первого набора позиционно-чувствительных детекторов, расположенных на первой стороне объема, для измерения положений и направлений падающих заряженных частиц, которые проникают сквозь первый набор позиционно-чувствительных детекторов, чтобы войти в объем; использование второго набора позиционно-чувствительных детекторов, расположенных на второй стороне объема, противоположной первой стороне, для измерения положений и направлений вылетающих заряженных частиц, выходящих из объема; использование измерений, выполняемых вторым набором позиционно-чувствительных детекторов, для определения падающих заряженных частиц, которые входят в объем и не проникают сквозь объем, чтобы достигать второго набора позиционно-чувствительных детекторов; определение потери энергии заряженных частиц, которые входят в объем и останавливаются внутри объема без проникновения сквозь объем; определение пространственного распределения заряженных частиц, которые входят в объем и останавливаются внутри объема без проникновения сквозь объем, на основании измеренной потери энергии; и использование пространственного распределения для восстановления трехмерного пространственного распределения материалов в объеме в соответствии с их плотностями и атомными номерами. На основании этого пространственного распределения объекты могут быть обнаружены в соответствии с их атомными номерами и плотностями. В одном осуществлении это можно использовать для обнаружения присутствия внутри объема одного или нескольких материалов низкой плотности с малыми атомными номерами.
Согласно еще одному аспекту предложена томографическая система досмотра, включающая в себя первый набор позиционно-чувствительных детекторов заряженных частиц, расположенных на первой стороне участка размещения объекта, для измерения положений и направлений влетающих заряженных частиц, входящих на участок размещения объекта; второй набор позиционно-чувствительных детекторов заряженных частиц, расположенных на второй стороне участка размещения объекта, противоположной первой стороне, для измерения положений и направлений вылетающих заряженных частиц, выходящих с участка размещения объекта; и блок обработки сигналов в связи с первым и вторым наборами позиционно-чувствительных детекторов заряженных частиц для приема данных об измеренных сигналах от влетающих заряженных частиц из первого набора позиционно-чувствительных детекторов заряженных частиц и измеренных сигналах от вылетающих заряженных частиц из второго набора позиционно-чувствительных детекторов заряженных частиц; обнаружения на основании принятых данных входного количества движения каждой влетающей заряженной частицы и выходного количества движения каждой вылетающей заряженной частицы; и вычисления потери энергии на основании обнаруженных входного и выходного количеств движения.
Согласно еще одному аспекту предложен способ получения томографических изображений объекта при досмотре, включающий в себя обнаружение входного количества движения каждой влетающей заряженной частицы; обнаружение выходного количества движения каждой вылетающей заряженной частицы; вычисление потери энергии на основании обнаруженных входного и выходного количеств движения; и использование вычисленной потери энергии для восстановления трехмерного пространственного распределения материалов в объеме в соответствии с их плотностями и атомными номерами. На основании этого пространственного распределения объекты можно обнаруживать в соответствии с их атомными номерами и плотностями.
Согласно еще одному аспекту информацию, измеряемую для проникших заряженных частиц и захваченных заряженных частиц в представляющем интерес объеме, можно использовать для построения томографических изображений объема. На основании измерений относительно проникших и остановленных частиц блок обработки объединяет два или три вида данных измерений об изменениях траекторий проникших заряженных частиц (например, проникших мюонов), информацию относительно остановленных заряженных частиц, которые захвачены внутри представляющего интерес объема (например, относительно захваченных мюонов) и информацию относительно потери энергии проникших заряженных частиц (например, проникших мюонов) для построения томографического изображения представляющего интерес объема. В этом процессе используется информация из различных процессов внутри представляющего интерес объема для повышения качества и разрешения окончательного изображения представляющего интерес объема и уменьшения ложного обнаружения.
Эти и другие аспекты поясняются более подробно на чертежах, в описании и формуле изобретения.
Краткое описание чертежей
На чертежах:
фиг.1 - иллюстрация работы типовой газовой камеры в виде дрейфовой трубки, предназначенной для обнаружения заряженных частиц;
фиг.2 - вид типовой мюонной томографической системы, основанной на газовых камерах, описанных в этой заявке;
фиг.3 - оценка потока космических лучей на уровне моря, разделенного на электронную и мюонную составляющие;
фиг.4 - иллюстрация двух режимов использования космических лучей, рассмотренных в этой заявке; слева (а) представлена иллюстрация прошедшего космического луча и справа (b) представлена иллюстрация остановленного космического луча;
фиг.5 - зависимость эффективной средней длины свободного пробега от энергии; в этой оценке не учтено образование ливня электронов, а потеря энергии предполагается 2 МэВ/г/см2;
фиг.6 - график тормозной способности и радиационных длин для набора обычных материалов и взрывчатых материалов наряду с величинами ошибки измерения, ожидаемыми для образцов этих материалов размерами 22×22×22 см3 при одноминутной экспозиции;
фиг.7 - график произведения минимального значения потери (dE/dx) энергии и радиационной длины на протяжении периодической таблицы элементов;
фиг.8 - график двумерного распределения остановленных частиц космических лучей в 20-килограммовом блоке из вольфрама; красный пик представляет дополнительные остановленные частицы в вольфрамовом блоке и расположенные в системе координат X-Y вольфрама в детекторе;
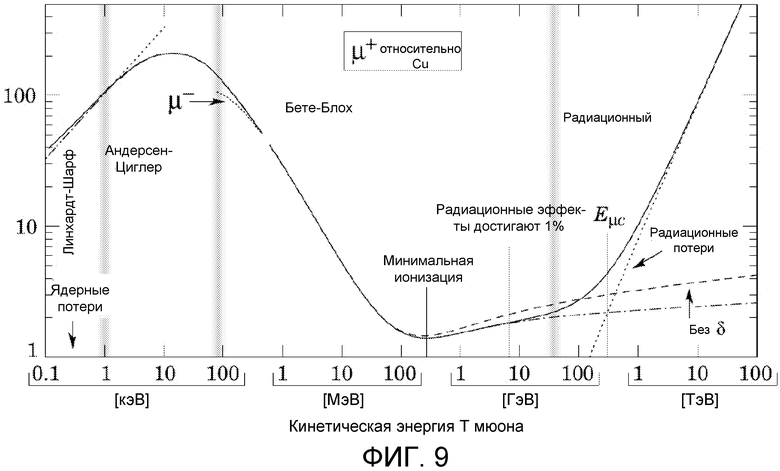
фиг.9 - пример тормозной способности для заряженных частиц в зависимости от энергии падающих заряженных частиц;
фиг.10 - пример иллюстрации измерения потери энергии в материалах и того, каким образом по измеренной потере выявляются свойства материалов в представляющем интерес объеме; и
фиг.11 - иллюстрация работы системы из фиг.2 на основании информации, измеренной относительно проникших заряженных частиц и задержанных заряженных частиц.
Подробное описание
Томографические способы, установки и системы обнаружения заряженных частиц, описываемые в этой заявке, могут быть реализованы для обнаружения присутствия определенных объектов или материалов, таких как ядерные материалы, и для получения томографической информации о таких объектах при различных применениях, включая, но без ограничения им, досмотр упаковок, контейнеров, загруженных машин на пунктах контроля безопасности, пограничных переходах и других местах, для выявления ядерных, представляющих угрозу объектов, которые могут варьироваться от полностью снаряженных ядерных зарядов до небольших количеств хорошо экранированных ядерных материалов. Методика позволяет обнаруживать экранированные и неэкранированные ядерные материалы при использовании одной детекторной системы в компактной конфигурации с получением экономически эффективного способа обнаружения ядерных и других поражающих устройств и материалов.
Фоновым космическим излучением обеспечивается источник, который можно использовать для исследования внутренней структуры объектов без необходимости в дополнительном излучении. При мюонной томографии (МТ) образуют 3-мерные изображения «плотности рассеяния», плотности, взвешенной по радиационной длине материала. Мюонной томографией можно проводить различие между общими классами материалов (с большим, средним, малым Z) при временах облучения меньше одной минуты в 5-сантиметровых вокселах. Радиография области, в которой используют составляющую потока космических лучей, которая тормозится в исследуемом объекте, обеспечивает дополнительную информацию и может дополнять сигнал мюонной томографии способом, который дает информацию о составе материалов объектов. Трекер космических лучей, который измеряет падающие частицы, добавляет значительную статистическую мощность к информации об области.
В томографии заряженных частиц используют преимущество постоянного на уровне моря потока заряженных частиц, образуемых при взаимодействиях космического излучения с атмосферой Земли. Например, за пределами адронного сектора мюон взаимодействует только при посредстве кулоновских и слабых сил. Вследствие этого он является сильно проникающим в вещество. Эти заряженные частицы имеют среднюю энергию приблизительно 3 ГэВ. Например, большая часть атмосферных мюонов будет проникать в свинец больше чем на один метр. Мюоны достигают поверхности с распределением косинус в квадрате в зените. Поток является небольшим при углах от зенита, близких к 90°, а средний угол мюона от зенита равен 37,5°.
Признаки, описанные в этой заявке, можно использовать для построения различных томографических систем обнаружения заряженных частиц. Например, томографическая система на основе заряженных частиц может включать в себя участок или объем размещения объекта, предназначенный для размещения досматриваемого объекта, первый набор позиционно-чувствительных детекторов заряженных частиц, расположенных на первой стороне участка размещения объекта, для измерения положений и направлений падающих заряженных частиц относительно участка размещения объекта, второй набор позиционно-чувствительных детекторов заряженных частиц, расположенных на второй стороне участка размещения объекта, противоположной первой стороне, для измерения положений и направлений вылетающих заряженных частиц, выходящих с участка размещения объекта, и блок обработки сигналов, который может включать в себя, например, микропроцессор, для приема данных измеряемых сигналов от влетающих заряженных частиц из первого набора позиционно-чувствительных детекторов заряженных частиц и измеряемых сигналов от вылетающих заряженных частиц из второго набора позиционно-чувствительных детекторов заряженных частиц.
Для примера, каждый из первого и второго наборов детекторов заряженных частиц может быть реализован с включением дрейфовых трубок, скомпонованных для выполнения позиционных измерений заряженных частиц в первом направлении и позиционных измерений заряженных частиц во втором направлении, отличном от первого направления. Блок обработки сигналов выполнен с возможностью анализа связанного с рассеянием поведения заряженных частиц, обусловленных рассеянием заряженных частиц в материалах в пределах участка размещения объекта, на основании измеренных входных и выходных положений и направлений заряженных частиц, чтобы получать томографический профиль или пространственное распределение центров рассеяния в пределах участка размещения объекта. Получаемый томографический профиль или пространственное распределение центров рассеяния можно использовать для выявления присутствия или отсутствия одного или нескольких объектов на участке размещения объекта, таких как материалы с большими атомными номерами, включая ядерные материалы или устройства, или объекты с особыми показателями плотности и атомных номеров, такие как взрывчатые вещества с малым Z или другой контрабандный товар со средним или малым Z.
Кроме того, характеристики электромагнитных ливней, создаваемых заряженными частицами, такими как электроны высокой энергии, взаимодействующими с объектами в представляющем интерес объеме, можно получать на втором наборе детекторов заряженных частиц. Электроны и позитроны из создаваемых электромагнитных ливней перемещаются сквозь объем и выходят из второго набора детекторов заряженных частиц.
Каждый позиционно-чувствительный детектор заряженных частиц (например, мюонов) может быть выполнен в различных конфигурациях, включая дрейфовые ячейки, такие как дрейфовые трубки, заполненные газом, который может ионизироваться заряженными частицами. Такую систему можно реализовать, чтобы использовать создаваемые естественными космическими лучами заряженные частицы в качестве источника заряженных частиц для обнаружения одного или нескольких объектов на участке размещения объекта. Различные признаки типовых томографических систем обнаружения заряженных частиц описаны в заявке PCT/US2007/082573 под названием “Particle detection systems and methods», поданной 25 октября 2007 года (публикация WO2008/123892), которая включена в эту заявку путем ссылки в качестве части описания.
При некоторых применениях в системах обнаружения частиц можно использовать дрейфовые трубки для обеспечения трекинга заряженных частиц, таких как мюоны, проходящих сквозь объем. Однако специалистам в данной области техники должно быть понятно, что такие детекторы заряженных частиц можно использовать в иных применениях, а не для трекинга создаваемых космическими лучами заряженных частиц, чтобы обнаруживать иные заряженные частицы, а не создаваемые космическими лучами заряженные частицы. Эти детекторы заряженных частиц можно применять для любой заряженной частицы из любого подходящего источника. Например, мюоны могут создаваться космическими лучами или могут быть пучком мюонов низкой интенсивности из ускорителя.
Создаваемые космическими лучами заряженные частицы могут давать информацию без дозы излучения сверх земного фона, а надлежащее обнаружение таких создаваемых космическими лучами заряженных частиц можно выполнять способом, который является особенно чувствительным к хорошо экранирующим материалам. Систему обнаружения заряженных частиц можно выполнять с возможностью осуществления томографии целевого объекта при досмотре на основании рассеяния заряженных частиц целевым объектом. Систему можно выполнять с возможностью осуществления томографии для локализации рассеяния (RC и LS). Томографическое разрешение по положению может быть выражено приблизительно следующим образом:

где


Например, в случае типичного среднеквадратичного значения угла рассеяния 0,02 рад и установки размером 200 см томографическое разрешение по положению составляет 0,02×200 см=4 см.
В одном способе угловое разрешение определяется следующим уравнением, основанным на статистике Пуассона:

где


Например, угловое разрешение в случае 
В таблице 1 показаны теоретические значения скорости (dE/dx) потери энергии и радиационной длины (Х) для различных материалов. После одной минуты счета на основании различных значений Х проведено различие между 10-сантиметровым кубом железа и 10-сантиметровым кубом свинца при стандартных отклонениях 6.
Томографические способы, предназначенные для построения изображения или модели объекта по многочисленным проекциям, полученным из различных направлений, можно реализовать в основанной на космических лучах системе, чтобы получить дискретное томографическое восстановление представляющего интерес объема на основании данных, обеспечиваемых заряженными частицами. В некоторых реализациях методы имитационного моделирования Монте-Карло можно использовать для прикладных исследований и сокращения времен сканирования. Другие методы стохастической обработки также можно использовать при осуществлении построения томографического изображения заряженных частиц, описанного в этой заявке.
Основанную на космических лучах радиографическую функцию систем обнаружения частиц согласно осуществлениям можно легче понять при обращении к примерам систем обнаружения, применяемых для обнаружения заряженных частиц.
Дрейфовые трубки представляет собой газовые камеры, предназначенные для обнаружения движущихся заряженных частиц. Каждая дрейфовая трубка включает в себя газообразную среду, заключенную внутри камеры, которая может ионизироваться движущейся заряженной частицей, проходящей сквозь газообразную среду. Анодный проволочный проводник помещен вблизи центра дрейфовой трубки, а стенка дрейфовой трубки заземлена для установления электрического поля, направленного от анодного проволочного проводника к стенке. Влетающая заряженная частица ионизирует молекулы газа из газообразной среды с образованием свободных электронов, которые ускоряются электрическим полем к анодному проволочному проводнику. Для такого электрона можно измерить время дрейфа до достижения анодного проволочного проводника. В направлении пути заряженной частицы, влетающей внутрь дрейфовой трубки, измеряют времена дрейфа электронов, создаваемых на различных местах пути заряженной частицы, и используют их для определения трека заряженной частицы внутри дрейфовой трубки. Одно из применений дрейфовых трубок заключается в обнаружении заряженных частиц (например, мюонов) при использовании одной или нескольких решеток дрейфовых трубок.
На фиг.1 показана работа типовой газовой камеры в виде дрейфовой трубки, предназначенной для обнаружения заряженных частиц. Дрейфовая трубка в этом примере представляет собой цилиндрическую трубку, образованную наружной цилиндрической стенкой 110 и заполненную детекторным газом 112, таким как аргон-изобутан 230, что позволяет обнаруживать создаваемые космическими лучами заряженные частицы, такие как мюоны. Центральная анодная проволока 120, продолжающаяся по длине цилиндрической трубки, предусмотрена электрически смещенной до более высокого потенциала, чем наружная стенка 110, чтобы создавалось положительное напряжение (например, 2-3 кВ или выше) для формирования внутри трубки статического поля высокого напряжения, направленного по радиальным направлениям от анодной проволоки 120 к стенке 110 в области 112 ионизации с внутренней стороны наружной стенки 110. Когда заряженная частица 130 входит в трубку и взаимодействует с атомами газа в области 112, многочисленные электроны 132 высвобождаются из этих атомов газа. Статическое поле побуждает «вереницу» электронов дрейфовать к положительно заряженной анодной проволоке 120. Анодная проволока 120 может быть очень тонкой, например, 0,001 дюйма (0,0254 мм) в диаметре, вследствие чего вблизи проволоки 120 создается очень сильное электрическое поле, так что образуется электронная лавина, когда приходит первый электрон. Например, в некоторых дрейфовых трубках лавина заряда может составлять около 105 электронов на один приходящий электрон, которые легко обнаруживаются чувствительной электроникой. Анодная проволока 120 соединена со схемой считывания, и считывание выполняется электронным способом электроникой регистрации данных с преобразователями временных интервалов в код. Соответственно, когда заряженная частица перемещается по детекторной дрейфовой трубке, формируется сигнал попадания.
В примерах, описанных в этой заявке, можно использовать различные материалы для создания стенки 110 трубки, которая ограничивает область 112 ионизации. Например, алюминий и другие металлические или электропроводные материалы можно использовать для создания стенки 110. В качестве еще одного примера другие непроводящие материалы, такие как изоляторы, также можно использовать для создания наружной стенки 110, а электропроводный слой или покрытие можно образовывать на внутренней поверхности наружной стенки 110, например, из углепластика с внутренними проводящими покрытиями. Дрейфовые трубки могут быть цилиндрическими, с круговым поперечным сечением или других геометрий. Например, прессованием алюминия можно создавать дрейфовые трубки с многочисленными некруговыми поперечными сечениями.
Блок обработки сигналов может быть присоединен для приема и обработки данных, связанных с сигналом попадания с дрейфовой трубки из фиг.1. Этот блок обработки сигналов может быть встроен в схему регистрации данных детектора или может быть отнесен от детектора. Сигнал попадания включает в себя данные, собираемые с дрейфовой ячейки, и представляет собой: 1) момент времени, в которое попадание получается электроникой, отсчитываемый относительно согласованного, но произвольного начала, и 2) номер (или другой идентификатор) канала дрейфовой ячейки в случае детектора с использованием решетки дрейфовых трубок. Модуль обработки сигналов может включать в себя модуль восстановления трека, который восстанавливает трек заряженной частицы, проходящей сквозь детектор, и базу калибровочных данных для калибровки результата. Заранее определенная информация о положениях дрейфовых ячеек сохраняется в базе калибровочных данных. Модули могут быть программными средствами или аппаратными средствами.
Как показано на фиг.1, для прослеживания создаваемого космическими лучами мюона или другой заряженной частицы, проходящей сквозь определенный детектор с дрейфовой трубкой, при обработке данных можно использовать наилучшее приближение. Определяют «радиус дрейфа», обозначенный на фиг.1, представляющий самое короткое расстояние между линией пути заряженной частицы и анодной проволокой 120 детектора, протянутой по оси трубки. В некоторых осуществлениях путь заряженной частицы (например, мюона) сквозь дрейфовую трубку может быть аппроксимирован прямой линией, поскольку отклонение движения заряженной частицы (например, мюона), вызываемое электрическим полем в дрейфовой трубке, может быть незначительным в таких осуществлениях. Момент времени, в который заряженная частица (например, мюон), проходящая сквозь дрейфовую трубку, создает ионизацию на определенном месте на треке заряженной частицы, является нулевым моментом (Т0) времени, и ионизации на различных местах на треке заряженной частицы имеют различные значения относительно нулевого момента (Т0) времени. Поскольку заряженные частицы (например, мюоны) движутся почти со скоростью света и намного быстрее, чем дрейфующие электроны, то хорошее приближение заключается в том, что любая данная заряженная частица проходит сквозь всю установку мгновенно, являясь причиной ионизации на различных местах вдоль трека заряженной частицы в дрейфовой трубке в один и тот же момент времени, который является моментом времени входа заряженной частицы в дрейфовую трубку. При соблюдении приведенного выше приближения нулевой момент Т0 времени является общим для всех попаданий на данном треке заряженной частицы. Нулевой момент Т0 времени может быть определен для трека каждой заряженной частицы. Расстояние дрейфа можно определять на основании времени пробега свободных электронов до анода. Эта и другая обработка может выполняться блоком обработки сигналов.
На фиг.2 показан пример мюонной томографической системы на основе газовых камер. В этом примере система включает в себя набор из двух или большего количества плоскостей 210 позиционно-чувствительных детекторов 212 заряженных частиц, расположенных выше объема 201 размещения или досмотра объекта, для построения изображения с получением положений и углов (то есть направлений в трехмерном пространстве) треков 230, 231 заряженных частиц. Детекторы 212 заряженных частиц выполнены с возможностью измерения положений и углов треков 230, 231 заряженных частиц относительно двух различных направлений, например, в двух ортогональных координатах вдоль осей x и y. Заряженные частицы (например, мюоны) проходят сквозь объем 201, где объект 203 может быть расположен, и рассеиваются и в зависимости от материала, занимающего объем, сквозь который они проходят, в некоторой степени теряют энергию. Другой набор из двух или большего количества плоскостей 220 позиционно-чувствительных детекторов 222 заряженных частиц выполнен с возможностью регистрации положений и направлений 230 вылетающих заряженных частиц или отсутствия 231 их. В некоторых осуществлениях дрейфовые трубки в детекторах 212 и 222 их двух наборов 210 и 220 расположены так, что позволяют выполнять по меньшей мере три позиционных измерения заряженных частиц в первом направлении и по меньшей мере три позиционных измерения заряженных частиц во втором направлении, которое отличается от первого направления и может быть ортогональным к первому направлению. Боковые детекторы (непоказанные) могут использоваться для обнаружения более горизонтально ориентированных треков заряженных частиц. В некоторых осуществлениях дополнительные боковые детекторы с дрейфовыми трубками могут быть реализованы по сторонам объема 201 для образования отсека или четырехсторонней конструкции, в которую для сканирования системой можно подавать упаковку, автомобиль или грузовой контейнер. Угол рассеяния каждой заряженной частицы (например, мюона) вычисляют на основании измерений на входе и выходе. В качестве конкретного примера каждый набор позиционно-чувствительных детекторов 210 или 220 может включать в себя первый двойной слой дрейфовых трубок, расположенных в направлении Х, и второй двойной слой дрейфовых трубок, расположенных в направлении Y. В каждом из слоев дрейфовые трубки могут располагаться в двух рядах, смещенных друг от друга на половину диаметра трубки.
Система в примере из фиг.2 включает в себя блок обработки сигналов, например компьютер, для приема данных об измеренных сигналах от влетающих заряженных частиц 230, 231 с детекторов 211 и от вылетающих заряженных частиц (например, мюонов) 230 с детекторов 222. Этот блок обработки сигналов выполнен с возможностью анализа рассеяния и потерь энергии заряженных частиц в объеме 201 на основании измеренных положений и направлений заряженных частиц 230, 231 для получения томографического профиля или пространственного распределения плотности рассеяния и потери энергии, отражающих пространственное распределение материалов в пределах объема 201. По полученному томографическому профилю или пространственному распределению плотности рассеяния в пределах объема 201 можно выявлять присутствие или отсутствие объекта 230 в объеме 201.
Обработка результатов измерений создаваемых космическими лучами заряженных частиц (например, мюонов) в объеме при досмотре (например, упаковки, контейнера или автомобиля) блоком обработки для системы из фиг.2 может включать в себя восстановление траектории заряженной частицы на протяжении объема 201, измерение количества движения влетающей заряженной частицы на основании сигналов с детекторов 212, измерение количества движения вылетающей заряженной частицы на основании сигналов с детекторов 222 и определение пространственного распределения материалов в объеме 201. Эти и другие результаты обработки можно использовать для построения томографического профиля и оценки различных свойств объема 201.
Например, восстановление траектории заряженной частицы, проходящей сквозь детектор 212 или 222, имеющий набор дрейфовых трубок из фиг.2, может включать в себя (а) прием сигналов попадания, представляющих идентификаторы попадания заряженных частиц в дрейфовые ячейки, и соответствующих времен попадания; (b) группирование во времени попаданий в дрейфовые ячейки, идентифицированных как связанных с треком конкретной заряженной частицы, проходящей сквозь детектор; (с) первоначальное оценивание нулевого момента времени для конкретной заряженной частицы; (d) определение радиусов дрейфа на основании оценок нулевого момента времени, данных о преобразовании времени дрейфа и времени попадания; (е) согласование линейных треков с радиусами дрейфа, соответствующими конкретному нулевому моменту времени; и (f) изучение и выбор значения нулевого момента времени, связанного с наилучшим из подборов треков, выполненных для конкретной заряженной частицы, и вычисление погрешности нулевого момента времени и параметров прослеживания. Такое восстановление трека на основании подбора нулевого момента времени обеспечивает восстановленную линейную траекторию заряженной частицы, проходящей сквозь детектор заряженных частиц, без использования быстродействующих детекторов (таких как фотоэлектронные умножители совместно со сцинтиллирующими панелями) или некоторого другого быстродействующего детектора, который обнаруживает прохождение заряженной частицы сквозь установку в течение нескольких микросекунд, что дает нулевой момент времени. Осуществления восстановления траектории заряженной частицы описаны в заявке PCT/US2007/082731 под названием “Determination of trajectory of a charged particle”, поданной 26 октября 2007 года (публикация WO2008/118208), которая включена в эту заявку путем ссылки в качестве части описания.
В качестве другого примера обработка измерения количества движения влетающей или вылетающей заряженной частицы на основании сигналов с детекторов 212 или 222 из фиг.2 может включать в себя (а) выполнение множества позиционно-чувствительных детекторов с возможностью рассеяния заряженных частиц, проходящих сквозь них; (d) измерение рассеяния заряженной частицы в позиционно-чувствительных детекторах, при этом измерение рассеяния содержит получение по меньшей мере трех позиционных измерений рассеяния заряженной частицы; (с) определение по меньшей мере одной траектории заряженной частицы на основании позиционных измерений; и (d) определение по меньшей мере одного результата измерения количества движения заряженной частицы на основании по меньшей мере одной траектории. Этот способ можно использовать для определения количества движения заряженной частицы на основании траектории заряженной частицы, которую определяют по рассеянию заряженной частицы в самих позиционно-чувствительных детекторах без использования дополнительных металлических пластин в детекторах. Осуществления способов определения количества движения заряженной частицы описаны в заявке PCT/US2007/082752 под названием “Measuring momentum for charged particle tomography”, поданной 26 октября 2007 года (публикация WO2008/140559), которая включена в эту заявку путем ссылки в качестве части описания.
В качестве еще одного примера пространственное распределение плотности рассеяния в объеме 201 на фиг.2 можно определить на основании томографических данных о заряженных частицах путем: (а) получения заданных томографических данных о заряженных частицах, соответствующих углам рассеяния и оценочным потерям энергии заряженных частиц, проходящих сквозь объем объекта, или заряженных частиц, останавливающихся в объеме; (b) получения распределения вероятностей рассеяния заряженных частиц и потери энергии для использования в алгоритме максимизации ожидания (максимизации ожидания максимального правдоподобия), при этом распределение вероятностей основано на модели статистического многократного рассеяния и потери энергии; (с) определения оценки по существу максимального правдоподобия плотности объема объекта при использовании алгоритма максимизации ожидания (максимизации ожидания максимального правдоподобия; и (d) вывода восстановленного пространственного распределения материалов в объеме объекта. Восстановленную плотность рассеяния в объеме объекта можно использовать для идентификации присутствия и/или типа объекта, занимающего представляющий интерес объем, на основании восстановленного пространственного распределения материалов. Различные применения включают в себя томографию создаваемых космическими лучами заряженных частиц, предназначенную для решения различных задач обеспечения безопасности, когда автомобили или груз можно сканировать с помощью трекера заряженных частиц. Осуществления способов, предназначенных для определения пространственного распределения плотности рассеяния в объеме, описаны в заявке PCT/US2007/082753 под названием “Statistical tomographic reconstruction based on measurement of charged particles”, поданной 26 октября 2007 года (публикация WO2008/140560), которая включена в эту заявку путем ссылки в качестве части описания.
Часть томографической обработки, относящейся к блоку обработки сигналов, можно выполнять в компьютере на том же месте, где находятся детекторы 212 и 222. Как вариант часть томографической обработки, относящейся к блоку обработки сигналов, можно выполнять в удаленном компьютере, который включен в компьютерную сеть, такую как частная сеть или сеть общего пользования, например Интернет.
Таким образом, многократное рассеяние создаваемых космическими лучами заряженных частиц (например, мюонов) можно использовать для избирательного обнаружения материалов с большим Z на фоне обычного груза. Выгодно, что этот способ является пассивным, при этом не подводится доза излучения сверх фоновой, а он является избирательным относительно плотных материалов с большим Z. Когда заряженная частица пересекает вещество, она сталкивается с кулоновскими силами от каждого нуклона, проходит мимо и отклоняется кулоновскими силами. Каждую заряженную частицу можно измерить для получения угла рассеяния траектории заряженной частицы в качестве меры интегральной плотности ядерного вещества вдоль ее пути, толщины материала, сквозь который прошла заряженная частица, на основании меры различия наилучшего приближения между линейными экстраполяциями траектории заряженной частицы, когда она входит и покидает представляющий интерес объем, и местом вдоль пути заряженных частиц, где рассеяние произошло, в качестве точки ближайшего приближения между линейными экстраполяциями траектории заряженной частицы, когда она входит и покидает представляющий интерес объем. Трехмерные представления относительно плотности ядерного вещества в представляющем интерес объеме формируют на основании данных о рассеянии заряженных частиц. Разрешение этого восстановления определяется количеством заряженных частиц, проходящих сквозь каждый элемент разрешения (воксел). Исследования показали, что в большей части случаев примерно от 7 до 10 заряженных частиц, пересекающих воксел, может быть достаточно для проведения на должном уровне различия между вокселами, заполненными веществом с малым Z (цементом, водой), вокселами, заполненным веществом со средним Z (железом, медью), и вокселами, заполненными веществами с большим Z (вольфрамом, ураном). Например, от 7 до 10 заряженных частиц пересекают 5-сантиметровые вокселы за приблизительно 20 с.
В дополнение к упомянутому выше построению изображения на основании обнаружения заряженных частиц, таких как мюоны, которые проникают сквозь представляющий интерес или досматриваемый объем, относительно «мягкие» заряженные частицы, которые имеют более низкую энергию и останавливаются внутри объема, не проникая сквозь объем, также можно обнаруживать для получения информации об объеме. Это использование «мягких» заряженных частиц можно сочетать с обнаружением «жестких» заряженных частиц, которые проникают сквозь объем, чтобы повышать общую чувствительность при построении изображения и способность системы к обнаружению (например, системы из фиг.2), что может быть трудным для достижения при обнаружении одного типа из «жестких» заряженных частиц и «мягких» заряженных частиц без обнаружения другого типа.
Когда первичные космические лучи (протоны, альфа-частицы и более тяжелые ядра) попадают в атмосферу Земли, они создают каскады субатомных частиц различных типов. Поток космических частиц около земной поверхности является преимущественно сочетанием мюонов и электронов. Мюоны возникают в результате распада пионов, тогда как электроны и позитроны являются продуктом распада мюонов, выбивания электронов и тормозного излучения. Поток мюонов на уровне моря равен приблизительно 1 см-2, а электронный поток составляет около 35-40% мюонного. Отдельные космические лучи обычно классифицируют как часть мягкой или жесткой составляющей спектра. Мягкая составляющая определяется как часть спектра, которая задерживается 15-сантиметровым свинцом. Электроны и позитроны преобладают в составе мягкой составляющей.
Составляющую потока космических лучей, которая имеет достаточно высокую энергию для прохождения сквозь объект, можно использовать для мюонной томографии (МТ). Кроме того, исследовались другие наведенные фоновым излучением процессы, которые могут давать информацию о неизвестных объектах. Мягкая составляющая потока космических лучей не обладает очень большой проникающей способностью и может давать дополнительную информацию. В материалах заряженные частицы замедляются и в конечном счете останавливаются вследствие кулоновского взаимодействия с электронами в материале. Этот процесс является чувствительным к плотности электронов в материале, сквозь который проходят заряженные частицы. Анализ статистической точности информации, получаемой на основании торможения космических лучей при измерении траекторий падения, приводит к удивительному открытию, что она является более значимой, чем информация на основании мюонной томографии толстых объектов.
Оценка относительных потоков электронов и мюонов как функция энергия показана на фиг.3. Энергетическая интегральная мюонная составляющая нормирована по отношению к 1/см2/мин, а электронная составляющая по отношению к 45% этого значения.
Мюонный томографический сканер, показанный на фиг.4, можно использовать для отделения событий, связанных с пропусканием, от событий, связанных с торможением. На а) космический луч входит сквозь верхние детекторы и выходит сквозь нижние детекторы после прохождения через представляющий угрозу объект. На b) космический луч останавливается в представляющем угрозу объекте. Отсутствие сигналов от нижнего детектора позволяет отделять эти связанные с торможением события от связанных с пропусканием событий. Данные трекинга от входных детекторов позволяют осуществлять томографию на основании относительного торможения, ожидаемого для модели объекта, с учетом интеграла тормозной способности вдоль входной траектории. Многократное рассеяние во входном детекторе можно использовать, чтобы получать оценку количества движения для выходящего космического луча, а ее можно использовать для улучшения оценки относительного торможения.
Оценки времени счета
Исследовали 20-килограммовый куб сильного взрывчатого вещества с плотностью 1,8 г/см3 и линейными размерами 22 см. Вероятно, что взрывчатое вещество в таком количестве приведет к катастрофическим разрушениям при детонации в пассажирском железнодорожном вагоне в туннеле под рекой Гудзон. Этот объект можно идентифицировать, используя создаваемые космическими лучами сигналы, если его геометрия может быть подчинена ограничениям для получения надлежащей точности томографическими способами или некоторыми другими способами, такими как построение оптического изображения.
В обычной радиографии используют поглощение проникающего излучения. В случае рентгеновской радиографии поверхностная плотность объекта определяется поглощением или рассеянием падающего пучка:


где 



Неопределенность при прохождении связана со статистикой Пуассона прошедшего потока, 


В случае заряженных частиц можно отдельно измерять прошедший поток 


Таким образом:
Видно, что измерение падающего потока приводит к значительному статистическому эффекту, когда пропускание приближается к единице (


Где 


Дополнительную информацию получают с помощью радиографии многократного рассеяния. Заряженные частицы, такие как протоны или мюоны, взаимодействуют с веществом, при этом происходит многократное кулоновское рассеяние. Многочисленные слабые взаимодействия дают в совокупности угловое отклонение, которое с хорошим приближением подчиняется гауссову распределению:

 .
.
Ширина распределения связана с рассеивающим материалом:
где 




Предполагается, что поток падающих космических лучей (сложенный из электронов и мюонов) составляет 1,4/см2/мин.
На фиг.6 показана возможность по измерению космических лучей проведения различия между некоторыми взрывчатыми материалами и другими обычными материалами. Предполагается, что свойства твердых материалов можно получать на основании их геометрии, а покрывающие материалы не принимаются в расчет. При четырехминутной экспозиции ошибки снижаются в 2 раза, и делается возможным различение взрывчатых веществ различных типов.
На фиг.7 представлено графически произведение минимального значения потери (dE/dx) энергии и радиационной длины на протяжении периодической таблицы элементов.
Другая возможность использования торможения заключается в проведении различия между различными материалами, которые могут быть скомпонованы имеющими одинаковую плотность. Напрашивается мысль, что способом, препятствующим мюонной томографии, является разбавление урана с тем, чтобы он имел такую же плотность, как и некоторые безопасные материалы, такие как железо. Хотя простой моделью, представленной в этой заявке, подтверждается, что проведение различия между ними является тривиальным, можно изготавливать смеси из трех материалов, в которых воспроизводятся плотность, радиационная длина и тормозная способность любого материала, относящегося к суррогатным материалам. Однако измерение тормозной способности затрудняет обман сканера космических лучей, а для составных объектов требуется дополнительное экранирование и необходимо повторное изготовление до того, как их можно будет использовать в качестве ядерных взрывчатых веществ.
В приведенном выше не обращалось внимание на проблему, связанную с образованием электронного ливня. Когда толщина объектов составляет несколько радиационных длин или больше, перенос электронов становится доминирующим вследствие образования электромагнитного ливня. В этом случае падающая энергия быстро преобразуется в ливень частиц. Это будет изменять скорость торможения, оцененную выше. При анализе фактических данных потребуются скорости торможения, определяемые эмпирически с использованием надлежащим образом выполненных тестовых объектов, и могут изменяться некоторые из выводов, представленных выше.
На фиг.8 представлен график двумерного распределения остановленных частиц космического излучения в 20-килограммовом блоке вольфрама. Красным пиком представлены дополнительные остановленные частицы в вольфрамовом блоке, и он находится в системе координат X-Y вольфрама в детекторе.
Восстановление объекта
Оценки, представленные выше, являются геометрически чрезмерно упрощенными. В действительности траектории частиц не являются нормальными к поверхности куба, а исходят со случайных направлений и отбираются с переменными длинами пути.
В случае трехмерного объекта, освещаемого случайно распределенным потоком, информацию можно извлекать, используя регуляризованный метод максимального правдоподобия, такой как используемый при восстановлениях в однофотонной эмиссионной компьютерной томографии. Явление можно описать набором вокселизированных плотностей 





Функция правдоподобия для набора космических лучей, из которых 


Трехмерное изображение можно восстанавливать, находя 
Поэтому в случае небольшой площадной массы информация, содержащаяся в сигнале торможения космических лучей, получаемом благодаря «мягким» заряженным частицам, является более значительной, чем информация в сигнале многократного рассеяния, получаемом благодаря «жестким» заряженным частицам. Эти два источника информации различным образом зависят от атомного заряда, так что сочетание их позволяет осуществлять идентификацию плотности и материала. Для извлечения томографической информации из торможения космических лучей требуется решение нелинейной задачи.
В дополнение к изменениям траектории, наводимым многократным кулоновским рассеянием заряженных частиц, пересекающих представляющий интерес объем, и торможению заряженных частиц внутри представляющего интерес объема при томографическом восстановлении можно характеризовать и использовать потерю энергии проникших заряженных частиц (например, мюонов). Ниже представлены способы регистрации информации о потере энергии из системы прослеживания заряженных частиц и использования этой информации и распределения частиц в пределах представляющего интерес объема при томографическом восстановлении материалов.
В томографии заряженных частиц трехмерные картины формируют, используя информацию, содержащуюся в многократном кулоновском рассеянии, которое происходит, когда заряженная частица проходит сквозь вещество. Когда заряженная частица пересекает вещество, она наталкивается на кулоновские силы от каждого нуклона, мимо которого она проходит. Чем больше заряженные частицы наталкиваются на ядра с большим атомным числом, тем становится возможным более значительное интегральное рассеяние. В дополнение к изменению траектории заряженная частица теряет некоторую часть энергии в зависимости от энергии падения и материала, сквозь который она проходит. Потеря энергии в основном представляет собой эффект, возникающий в результате взаимодействий частицы с электронами в материале, в отличие от сигнала рассеяния, на который оказывают преобладающее влияние взаимодействия с протонами.
Что касается системы на фиг.2, то в дополнение к обнаружению перемещения заряженных частиц в представляющем интерес объеме 201 и выхода из него можно осуществлять обнаружение и анализ потери энергии пересекающих заряженных частиц. Заряженные частицы входят в представляющий интерес объем 201 и взаимодействуют с объектами, имеющимися на траекториях заряженных частиц. Когда заряженные частицы рассеиваются в ответ на взаимодействие с объектами, заряженные частицы теряют энергию в соответствии с характеристиками объектов.
На фиг.9 показан пример тормозной способности заряженных частиц в зависимости от энергии падающей заряженной частицы. Пример тормозной способности (=(dE/dx)) показан для положительного мюона в меди как функция кинетической энергии Т (12 порядков диапазона величины).
Потеря энергии является высокой в случае мюонов с кинетической энергией на уровне или ниже массы покоя мюона (нерелятивистских мюонов). Около средней кинетической энергии 4 ГэВ мюонов из космических лучей потеря энергии описывается теорией Бете, представляющей первичную ионизацию и потери на возбуждение, с некоторыми дополнительными поправками. Средняя потеря энергии составляет приблизительно 2 МэВ×см2/г. Потеря энергии зависит от размеров атома и заряда иным образом, чем многократное кулоновское рассеяние. Поэтому измерение потери энергии, когда оно сочетается с измерением многократного кулоновского рассеяния, обеспечивает дополнительную информацию о материале в представляющем интерес объеме.
На фиг.10 показан пример, иллюстрирующий измерение потери энергии в материалах и каким образом измеряемая потеря выявляет свойства материалов в представляющем интерес объеме. Знание траектории заряженной частицы дает информацию о положении и распределении материалов, вызывающих потерю энергии.
Измерение потери энергии в трековом детекторе заряженных частиц
Момент количества движения заряженной частицы можно измерять в трековом детекторе в соответствии с многократным рассеянием в материале, охваченном детектором. Путем оценивания степени совпадения между данными, полученными с помощью заряженной частицы и подбором прямой линии, можно получить оценку количества движения частицы. Измерение количества движения можно делать независимо для входной и выходной траекторий частиц, получая результат измерения потери энергии при пересечении представляющего интерес объема.
Использование потери энергии при томографических восстановлениях
Программы восстановления реализуют, используя вокселы для задания представляющего интерес объема. Целые числа nx, ny и nz используют для задания сторон x, y и z типового прямоугольного объема. Каждый воксел включает в себя стороны dx, dy и dz, при этом каждая сторона представлена показателем стороны, деленным на число n (то есть dx=x/nx и т.д.). Другим параметром, который можно использовать при восстановлении, является весовой коэффициент, назначаемый вокселам, что приводит к построению изображения, когда создают двумерный или трехмерный график зависимости весового коэффициента от местоположений вокселов в пространстве.
Весовой коэффициент можно рассматривать как среднюю плотность вещества в каждом вокселе. Это основано на том, что весовой коэффициент представляет меру средней радиационной длины вещества в каждом вокселе. Радиационная длина зависит от плотности и элементарного заряда вещества и является измеряемой постоянной для каждого элемента, которая может быть получена в результате моделирований соединений с известным химическим составом. Алгоритмы восстановления могут быть реализованы для придания весовых коэффициентов вокселам на основании исследования используемого, представляющего интерес объема.
В случае заряженных мюонов и электронов весовые коэффициенты могут включать рассеяние, потерю энергии, торможение и ливнеобразование как отдельные процессы, которые можно использовать для построения изображения опрашиваемого объема. Весовые коэффициенты добавляют к вокселам, которые пересекаются заряженными частицами, и сумму весовых коэффициентов связывают с плотностью или радиационной длиной. Простые программы можно выполнять, чтобы использовать входную траекторию или любые выходные траектории заряженных частиц, которые измеряются детекторами (например, детекторами 120 и 130), расположенными на 2 сторонах представляющего интерес объема. Более сложные программы можно выполнять, чтобы использовать динамическое регулирование размера вокселов на основании плотности после прохождения небольшой порции заряженных частиц; и сглаживание или группирование на основании плотности прилегающих вокселов.
В томографии заряженных частиц трехмерные представления плотности рассеяния, измерение плотности и атомный номер (протонная плотность) материала в представляющем интерес объеме образуют на основании данных о рассеянии заряженных частиц. Качество этого восстановления определяется количеством заряженных частиц, проходящих сквозь каждый элемент (воксел) разрешения и количеством информации, доступной от каждой заряженной частицы. Угол рассеяния, его положение и расстояние ближайшего приближения между проекциями входной и выходной траекторий заряженной частицы включают в функцию правдоподобия. Функцию можно максимизировать в соответствии с массивом данных о рассеянии, чтобы восстановить свойства и распределение материала в представляющем интерес объеме. Добавление потери энергии заряженной частицы к функции правдоподобия дает связанную, но частично независимую меру плотности электронов и распределения материалов в представляющем интерес объеме.
Функцию обновления задают для каждого набора заряженных частиц, которые проходят в данное время сквозь представляющий интерес объем. Это считают одной итерацией. Затем каждую итерацию добавляют к общему числу до окончания сканирования. Функция обновления зависит от количества вокселов, измерений, при которых определяют один или несколько весовых коэффициентов. Каждый воксел обновляют с помощью некоторого значения, вычисляемого на основании заряженных частиц (например, мюонов и/или электронов), проходящих сквозь воксел, углов рассеяния и смещений. При каждой итерации к этой функции обновления можно добавлять информацию от ливней. Таким образом, все данные считаются вычисленными с одним и тем же правдоподобием вместо вычисления каждого (рассеяния и ливнеобразования) отдельно. Другая информация, которая может учитываться, включает в себя информацию на основании торможения и потери энергии.
В осуществлении систему из фиг.2 можно использовать для получения данных измерений, содержащих информацию о проникших заряженных частицах (например, о проникших мюонах) и остановленных зарядных частицах, которые захватываются внутри представляющего интерес объема. Основываясь на такой информации, блок обработки формирует томографические изображения объема на основании результатов различных измерений и затем формирует окончательное изображение, используя одно или сочетание по меньшей мере двух томографических изображений.
На фиг.11 показана работа системы из фиг.2, основанная на информации, измеренной для проникших заряженных частиц и захваченных заряженных частиц. На основании результатов измерений проникших и остановленных заряженных частиц блок обработки объединяет два или три типа данных измерений, относящихся к изменениям траекторий проникших заряженных частиц (например, проникших мюонов), информацию об остановленных заряженных частицах, которые захвачены внутри представляющего интерес объема (например, о захваченных мюонах), и информацию о потере энергии проникших заряженных частиц (например, проникших мюонов) для построения томографического изображения представляющего интерес объема. В этом процессе информация из различных процессов внутри представляющего интерес объема используется для повышения качества и разрешения окончательного изображения представляющего интерес объема и для снижения ложного обнаружения. В одном осуществлении результаты измерений трех видов могут быть входными данными алгоритма обработки для построения в соответствии с принципом максимального правдоподобия томографической карты материала из объема. По существу, при наличии результатов измерений трех видов от системы из фиг.2 формируемое томографическое изображение представляющего интерес объема может быть более точным и верным, чем изображение по результатам только одного любого из измерений.
Хотя этот документ содержит многочисленные особенности, они должны толковаться не как ограничения объема любого изобретения или изобретения, которое может быть заявлено, а как описания признаков, специфических для конкретных осуществлений. Определенные признаки, которые описаны в этом документе применительно к отдельным осуществлениям, также могут быть реализованы в сочетании в одном осуществлении. И наоборот, различные признаки, которые описаны применительно к одному осуществлению, могут быть также реализованы в многочисленных осуществлениях отдельно или в любой подходящей подкомбинации. Кроме того, хотя признаки, описанные выше, могут действовать в определенных сочетаниях и даже исходно заявлены соответствующим образом, в некоторых случаях один или несколько признаков из заявленного сочетания могут быть удалены из сочетания, а заявленное сочетание может быть направлено в подкомбинацию или вариант подкомбинации.
Таким образом, описаны конкретные осуществления изобретения. Варианты и улучшения описанных осуществлений и другие осуществления могут быть сделаны на основании того, что описано и показано в этом документе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБНАРУЖЕНИЕ ЧАСТИЦ И ВАРИАНТЫ ПРИМЕНЕНИЯ ДЛЯ БЕЗОПАСНОСТИ И ПОРТАЛЬНОГО КОНТРОЛЯ | 2007 |
|
RU2468391C2 |
| СТАТИСТИЧЕСКАЯ ТОМОГРАФИЧЕСКАЯ РЕКОНСТРУКЦИЯ НА ОСНОВЕ ИЗМЕРЕНИЙ ЗАРЯЖЕННЫХ ЧАСТИЦ | 2007 |
|
RU2468390C2 |
| СИСТЕМА ПЕРЕДВИЖНЫХ ДЕТЕКТОРОВ ЗАРЯЖЕННЫХ ЧАСТИЦ И СПОСОБЫ ВИЗУАЛИЗАЦИИ ОТРАБОТАВШЕГО ЯДЕРНОГО ТОПЛИВА | 2019 |
|
RU2806543C2 |
| СПОСОБ ТОМОГРАФИЧЕСКОГО КОНТРОЛЯ КРУПНОГАБАРИТНЫХ ГРУЗОВ | 1993 |
|
RU2072513C1 |
| Способ азимутального сканирования атмосферы с использованием потока мюонов космических лучей | 2023 |
|
RU2819137C1 |
| КООРДИНАТНЫЙ ГАЗОНАПОЛНЕННЫЙ ДЕТЕКТОР | 2011 |
|
RU2485547C1 |
| ГАММА-ЛУЧЕВАЯ ТОМОГРАФИЧЕСКАЯ РАДИОГРАФИЯ | 2018 |
|
RU2773120C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И НЕРАЗРУШАЮЩЕГО АНАЛИЗА ВЕЩЕСТВ, СОДЕРЖАЩИХ ЯДРА ЛЕГКИХ ЭЛЕМЕНТОВ | 1996 |
|
RU2095796C1 |
| СПОСОБ РЕГИСТРАЦИИ РЕАКТОРНЫХ АНТИНЕЙТРИНО | 2019 |
|
RU2724133C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ МЮОНОГРАФИЙ | 2008 |
|
RU2406919C2 |






Использование: для томографии целевого объекта. Сущность изобретения заключается в том, что измеряют потерю энергии заряженных частиц, которые входят и проникают сквозь объем или останавливаются внутри объема без проникновения сквозь объем; на основании измеряемой потери энергии определяют пространственное распределение заряженных частиц, которые входят и проникают сквозь объем или останавливаются внутри объема без проникновения сквозь объем; и используют пространственное распределение потери энергии заряженных частиц для восстановления трехмерного распределения материалов в досматриваемом объеме. Технический результат: повышение качества изображения представляющего интерес объема. 8 н. и 4 з.п. ф-лы, 11 ил.
1. Способ контролирования объема, подвергаемого воздействию заряженных частиц, заключающийся в том, что:
измеряют потерю энергии заряженных частиц, которые входят и проникают сквозь объем или останавливаются внутри объема без проникновения сквозь объем;
на основании измеряемой потери энергии определяют пространственное распределение заряженных частиц, которые входят и проникают сквозь объем или останавливаются внутри объема без проникновения сквозь объем; и
используют пространственное распределение потери энергии заряженных частиц для восстановления трехмерного распределения материалов в досматриваемом объеме.
2. Способ по п.1, содержащий:
измерение заряженных частиц, которые входят и проникают сквозь объем, и заряженных частиц, которые останавливаются в объеме; и
сочетание измерений потери энергии заряженных частиц с угловым отклонением заряженных частиц для восстановления пространственного распределения одного или нескольких материалов в объеме.
3. Томографическая система досмотра, содержащая:
первый набор позиционно-чувствительных детекторов, расположенных на первой стороне участка размещения объекта, для измерения положений и направлений падающих заряженных частиц, входящих на участок размещения объекта;
второй набор позиционно-чувствительных детекторов, расположенных на второй стороне участка размещения объекта, противоположной первой стороне, для измерения положений и направлений вылетающих заряженных частиц, выходящих с участка размещения объекта, или отсутствия заряженных частиц, которые остановились в объеме; и
блок обработки сигналов для приема данных об измеренных сигналах от влетающих заряженных частиц из первого набора позиционно-чувствительных детекторов и измеренных сигналах от вылетающих заряженных частиц из второго набора позиционно-чувствительных детекторов, при этом блок обработки сигналов выполнен с возможностью анализа поведения заряженных частиц, обусловленного взаимодействиями с материалами в пределах участка размещения объекта, на основании измеренных входных и выходных положений и направлений заряженных частиц, чтобы получать томографический профиль или пространственное распределение материалов в пределах участка размещения объекта,
при этом блок обработки сигналов является функционирующим для измерения потери энергии заряженных частиц, которые входят в объем и проникают сквозь объем, и заряженных частиц, которые останавливаются внутри объема без проникновения сквозь объем, определения пространственного распределения заряженных частиц, которые входят в объем и проникают сквозь объем, и заряженных частиц, которые останавливаются внутри объема без проникновения сквозь объем; и
на основании измеренной потери энергии использование пространственного распределения для восстановления пространственного распределения материалов в пределах досматриваемого объема.
4. Способ контролирования объема, подвергаемого воздействию заряженных частиц, заключающийся в том, что:
используют первый набор позиционно-чувствительных детекторов, расположенных на первой стороне объема, для измерения положений и направлений падающих заряженных частиц, которые проникают сквозь первый набор позиционно-чувствительных детекторов, чтобы войти в объем;
используют второй набор позиционно-чувствительных детекторов, расположенных на второй стороне объема, противоположной первой стороне, для измерения положений и направлений вылетающих заряженных частиц, выходящих из объема, или отсутствия их;
используют измерения, выполненные вторым набором позиционно-чувствительных детекторов, для определения падающих заряженных частиц, которые входят в объем и проникают сквозь объем, и заряженных частиц, которые не проникают сквозь объем, чтобы достичь второго набора позиционно-чувствительных детекторов;
определяют потерю энергии заряженных частиц, которые входят в объем и проникают сквозь объем, и заряженных частиц, которые останавливаются внутри объема без проникновения сквозь объем;
определяют пространственное распределение заряженных частиц, которые входят в объем и останавливаются внутри объема без проникновения сквозь объем, на основании измеренной потери энергии; и
используют пространственное распределение заряженных частиц, которые входят в объем и останавливаются внутри, для восстановления пространственного распределения материалов в досматриваемом объеме.
5. Способ контролирования объема, подвергаемого воздействию заряженных частиц, заключающийся в том, что:
измеряют потерю энергии заряженных частиц, которые входят в объем и останавливаются внутри объема без проникновения сквозь объем;
на основании измеренной потери энергии определяют пространственное распределение заряженных частиц, которые входят в объем и останавливаются внутри объема без проникновения сквозь объем; и
используют пространственное распределение для обнаружения присутствия одного или нескольких материалов низкой плотности с малыми атомными номерами.
6. Способ по п.5, содержащий:
измерение заряженных частиц, которые входят и проникают сквозь объем, для определения присутствия одного или нескольких материалов высокой плотности с атомными номерами, большими, чем малые атомные номера одного или нескольких материалов низкой плотности; и
сочетание измерений одного или нескольких материалов высокой плотности и одного или нескольких материалов низкой плотности для досмотра содержимого внутри объема.
7. Томографическая система досмотра, содержащая:
первый набор позиционно-чувствительных детекторов, расположенных на первой стороне участка размещения объекта, для измерения положений и направлений падающих заряженных частиц относительно участка размещения объекта;
второй набор позиционно-чувствительных детекторов, расположенных на второй стороне участка размещения объекта, противоположной первой стороне, для измерения положений и направлений вылетающих заряженных частиц, выходящих с участка размещения объекта; и
блок обработки сигналов для приема данных об измеренных сигналах от падающих заряженных частиц из первого набора позиционно-чувствительных детекторов и измеренных сигналах от вылетающих заряженных частиц из второго набора позиционно-чувствительных детекторов, при этом блок обработки сигналов выполнен с возможностью анализа связанного с рассеянием поведения заряженных частиц, обусловленных рассеянием заряженных частиц в материалах в пределах участка размещения объекта, на основании измеренных входных и выходных положений и направлений заряженных частиц, чтобы получать томографический профиль или пространственное распределение центров рассеяния в пределах участка размещения объекта,
в которой блок обработки сигналов является функционирующим для измерения потери энергии заряженных частиц, которые входят в объем и останавливаются внутри объема без проникновения сквозь объем, определения пространственного распределения заряженных частиц, которые входят в объем и останавливаются внутри объема без проникновения сквозь объем, на основании измеренной потери энергии, и использования пространственного распределения для обнаружения присутствия одного или нескольких материалов низкой плотности с малыми атомными номерами.
8. Способ контролирования объема, подвергаемого воздействию заряженных частиц, заключающийся в том, что:
используют первый набор позиционно-чувствительных детекторов, расположенных на первой стороне объема, для измерения положений и направлений падающих заряженных частиц, которые проникают сквозь первый набор позиционно-чувствительных детекторов, чтобы войти в объем;
используют второй набор позиционно-чувствительных детекторов, расположенных на второй стороне объема, противоположной первой стороне, для измерения положений и направлений вылетающих заряженных частиц, выходящих из объема;
используют измерения, выполняемые вторым набором позиционно-чувствительных детекторов, для определения падающих заряженных частиц, которые входят в объем и не проникают сквозь объем, чтобы достигать второго набора позиционно-чувствительных детекторов;
определяют потерю энергии заряженных частиц, которые входят в объем и останавливаются внутри объема без проникновения сквозь объем;
определяют пространственное распределение заряженных частиц, которые входят в объем и останавливаются внутри объема без проникновения сквозь объем, на основании измеренной потери энергии; и
используют пространственное распределение для обнаружения присутствия внутри объема одного или нескольких материалов низкой плотности с малыми атомными номерами.
9. Способ по п.8, содержащий:
измерение заряженных частиц, которые входят и проникают сквозь объем, для определения присутствия одного или нескольких материалов с атомными номерами, большими, чем малые атомные номера одного или нескольких материалов низкой плотности; и
сочетание измерений одного или нескольких материалов высокой плотности и одного или нескольких материалов низкой плотности для досмотра содержимого внутри объема.
10. Томографическая система досмотра, содержащая:
первый набор позиционно-чувствительных детекторов заряженных частиц, расположенных на первой стороне участка размещения объекта, для измерения положений и направлений влетающих заряженных частиц, входящих на участок размещения объекта;
второй набор позиционно-чувствительных детекторов заряженных частиц, расположенных на второй стороне участка размещения объекта, противоположной первой стороне, для измерения положений и направлений вылетающих заряженных частиц, выходящих с участка размещения объекта; и
блок обработки сигналов, выполненный с возможностью обмена данными с первым и вторым наборами позиционно-чувствительных детекторов заряженных частиц для
приема данных об измеренных сигналах от влетающих заряженных частиц из первого набора позиционно-чувствительных детекторов заряженных частиц и измеренных сигналах от вылетающих заряженных частиц из второго набора позиционно-чувствительных детекторов заряженных частиц;
обнаружения на основании принятых данных входного количества движения каждой влетающей заряженной частицы и выходного количества движения каждой вылетающей заряженной частицы; и
вычисления потери энергии на основании обнаруженных входного и выходного количеств движения.
11. Система по п.10, в которой блок обработки сигналов выполнен с возможностью анализа характеристик рассеяния влетающих заряженных частиц, обусловленных материалами на участке размещения объекта.
12. Способ получения томографических изображений объекта при досмотре, заключающийся в том, что:
обнаруживают входное количество движения каждой влетающей заряженной частицы;
обнаруживают выходное количество движения каждой вылетающей заряженной частицы;
вычисляют потерю энергии на основании обнаруженных входного и выходного количеств движения; и
используют вычисленную потерю энергии для идентификации объекта при досмотре.
| US 2006180753 А1, 17.08.2006 | |||
| JP 2007271400 A, 18.10.2007 | |||
| US 4504438 A, 12.03.1985 | |||
| СПОСОБ ТОМОГРАФИЧЕСКОГО КОНТРОЛЯ КРУПНОГАБАРИТНЫХ ГРУЗОВ | 1993 |
|
RU2072513C1 |

