ПРИТЯЗАНИЕ НА ПРИОРИТЕТ И СВЕДЕНИЯ О РОДСТВЕННОЙ ПАТЕНТНОЙ ЗАЯВКЕ
[0001] Этот патентный документ испрашивает приоритет и преимущества предварительной заявки на патент США № 62/755180 под названием “SYSTEM OF MOBILE CHARGED PARTICLE DETECTORS AND METHODS OF SPENT NUCLEAR FUEL IMAGING”, поданной заявителем и правопреемником «Decision Sciences International Corporation» 2 ноября 2018 г.
ГОСУДАРСТВЕННАЯ ПОДДЕРЖКА ИССЛЕДОВАНИЙ ИЛИ РАЗРАБОТОК
[0002] Никакая часть этого изобретения не сделана с государственной поддержкой. Государство не имеет никаких прав на изобретение.
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
[0003] Этот патентный документ относится к области визуализации и инспектирования различных предметов с помощью детекторов заряженных частиц.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0004] Мюоны космических лучей естественного происхождения на земной поверхности можно использовать для различных применений детектирования и инспектирования.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] В этом патентном документе раскрыты оборудование и методы, которые могут быть реализованы для обеспечения устройства, систем и способов детектирования материалов, в том числе, но без ограничения ими, специальных ядерных материалов, путем измерения множественного кулоновского рассеяния и разрежения заряженных частиц, пересекающих представляющий интерес объем.
[0006] В некоторых вариантах реализации раскрытых оборудования и методов представляющий интерес объем может содержать контейнер с отработавшим ядерным топливом. Раскрытые здесь устройство, система и способы не ограничиваются конкретным типом объекта или не зависят от него, и поэтому использование такого контейнера в качестве объекта следует рассматривать как пример, а не существенный элемент раскрытых оборудования и методов. Тем не менее, в различных вариантах реализации устройство, система и способы могут быть выполнены или оптимизированы под конкретный случай инспектирования контейнеров для сухого хранения.
[0007] В различных вариантах применения раскрытые здесь устройство, система и способы могут быть реализованы для использования заряженных частиц, которые являются компонентами космических лучей, в качестве зонда для инспектирования представляющего интерес объема и обеспечения трехмерного картографирования различных материалов, включая, но без ограничения, специальные ядерные материалы. Использование частиц космических лучей имеет несколько важных преимуществ.
[0008] Одно из важных качеств раскрытого устройства состоит в том, что оно не генерирует никакого искусственного излучения, используя поток космических лучей естественного происхождения в качестве зонда для визуализации представляющего интерес объема. Это делает устройство безопасным для человека, других живых существ и материальных объектов.
[0009] В одном аспекте раскрытые оборудование и методы могут быть реализованы для построения устройства для инспектирования и визуализации содержимого представляющего интерес объема включающим в себя первый трековый блок детекторов частиц, располагаемый для приема входящих заряженных частиц, которые далее проходят через объект инспектирования, содержащийся в представляющем интерес объеме; второй трековый блок детекторов частиц, располагаемый ниже относительно первого трекового блока детекторов частиц и с противоположной первому трековому блоку детекторов частиц стороны от представляющего интерес объема, выполненный с возможностью принимать заряженные частицы, которые проходят через первый трековый блок детекторов частиц и проходят через объект, и измерять положение и направление каждой заряженной частицы; и механическую опорную конструкцию для удержания как первого трекового блока детекторов частиц, так и второго трекового блока детекторов частиц в положении, при котором первый и второй трековые блоки детекторов частиц имеют возможность принимать заряженные частицы. И к первому трековому блоку детекторов частиц, и к второму трековому блоку детекторов частиц также подключен процессор для обработки информации от первого и второго трековых блоков детекторов частиц для выдачи оценки пространственной карты атомного числа и плотности объекта. В одном варианте реализации этого устройства механическая опорная конструкция может включать в себя по меньшей мере два передвижных узла для обеспечения подвижности и опоры для первого и второго трековых блока детекторов частиц, причем механическая опорная конструкция находится в обычно вертикальной ориентации, причем первый трековый блок детекторов частиц располагается выше, чем второй трековый блок детекторов частиц, причем механическая опорная конструкция выполнена с возможностью придавать геометрическую жесткость упомянутым по меньшей мере двум передвижным узлам в ходе инспектирования.
[0010] В другом аспекте раскрытые оборудование и методы могут быть реализованы для обеспечения способа работы устройства инспектирования, который включает в себя размещение узла с первым и вторым чувствительными трековыми блоками детекторов частиц вокруг объекта инспектирования для формирования системы чувствительных трековых блоков детекторов частиц с использованием первой и второй передвижных опорных конструкций первого и второго чувствительных трековых блоков детекторов частиц, соответственно, с обеспечением возможности регулировки положений первого и второго чувствительных трековых блоков детекторов частиц; прием на первом чувствительном трековом блоке детекторов частиц входящих заряженных частиц, которые далее проходят через объект инспектирования и через второй чувствительный трековый блок детекторов частиц, расположенный ниже относительно первого трекового детектора частиц и представляющего интерес объема, содержащего объект инспектирования; и измерение положения и направления каждой из заряженных частиц, которые проходят через объект и первый и второй чувствительные трековые блоки детекторов частиц. Этот способ дополнительно включает в себя сбор положения и направления множества заряженных частиц; обработку положения и направления множества заряженных частиц в виде числовых данных на основании электрических сигналов, генерируемых в первом и втором чувствительных трековых блоков детекторов частиц; определение точек взаимодействия каждой заряженной частицы с первым и вторым чувствительными трековыми блоками детекторов частиц; аппроксимацию траектории входа каждой заряженной частицы прямой линией на основании определенных точек взаимодействия каждой заряженной частицы с первым чувствительным трековым блоком детекторов частиц; аппроксимацию траектории выхода каждой заряженной частицы прямой линией на основании определенных точек взаимодействия каждой заряженной частицы со вторым чувствительным трековым блоком детекторов частиц; и реконструкцию пространственной карты свойств материала на основании плотностей и радиационных длин объекта в представляющем интерес объеме и на основании совокупности траекторий входа и выхода частиц.
[0011] Различные признаки и варианты реализации раскрытых устройств, систем и способов более подробно представлены на чертежах, в описании и формуле изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
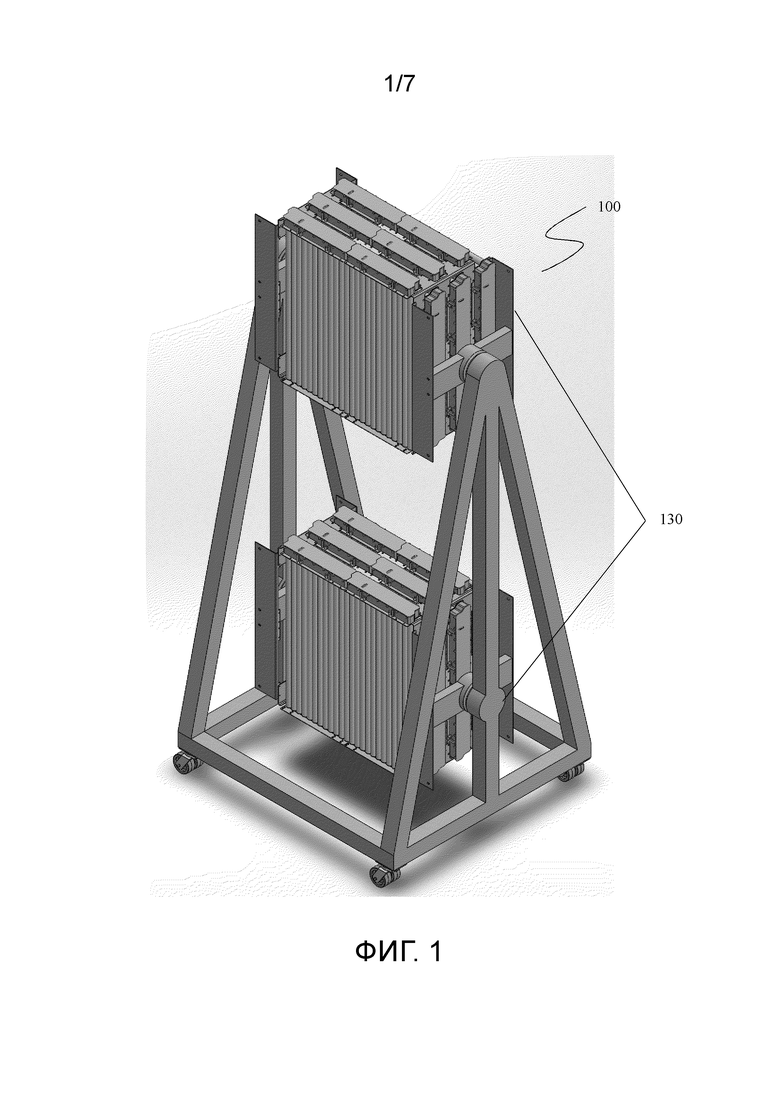
[0012] Фиг. 1 показывает примерную концептуальную конструкцию передвижного узла, содержащего два блока чувствительных детекторов (супермодулей), установленных в вертикальной ориентации с промежутком между ними.
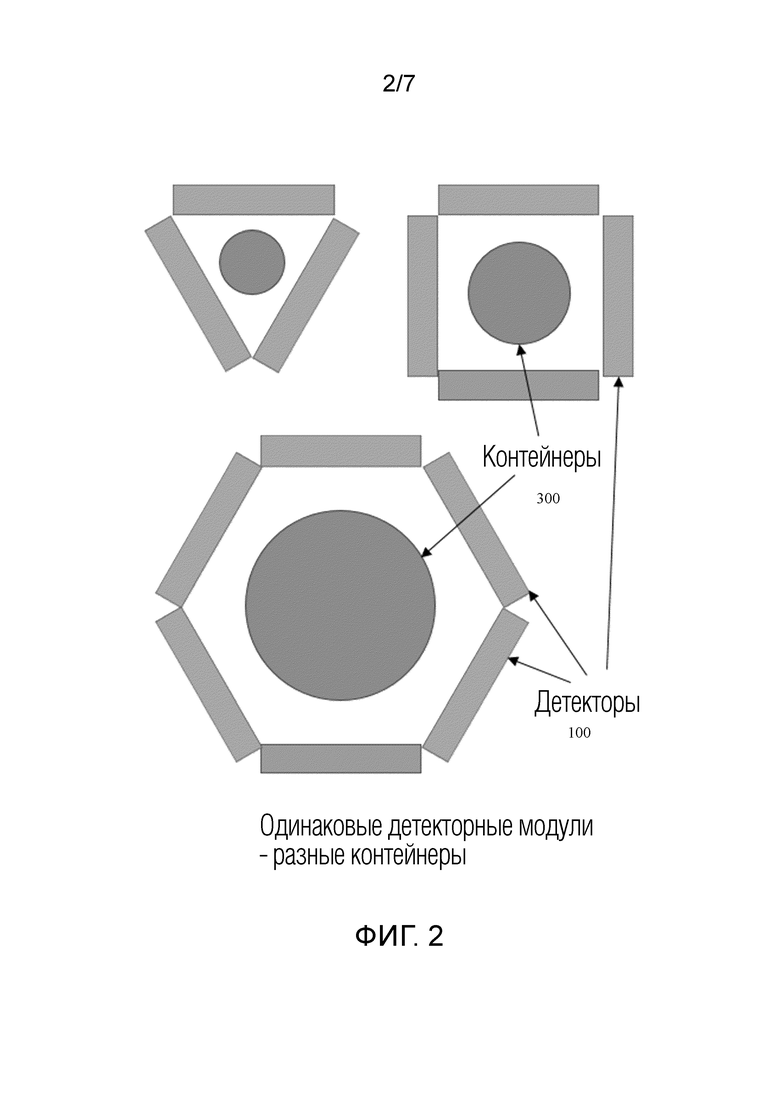
[0013] Фиг. 2 схематично иллюстрирует примерное размещение передвижных узлов вокруг объекта инспектирования на виде сверху.
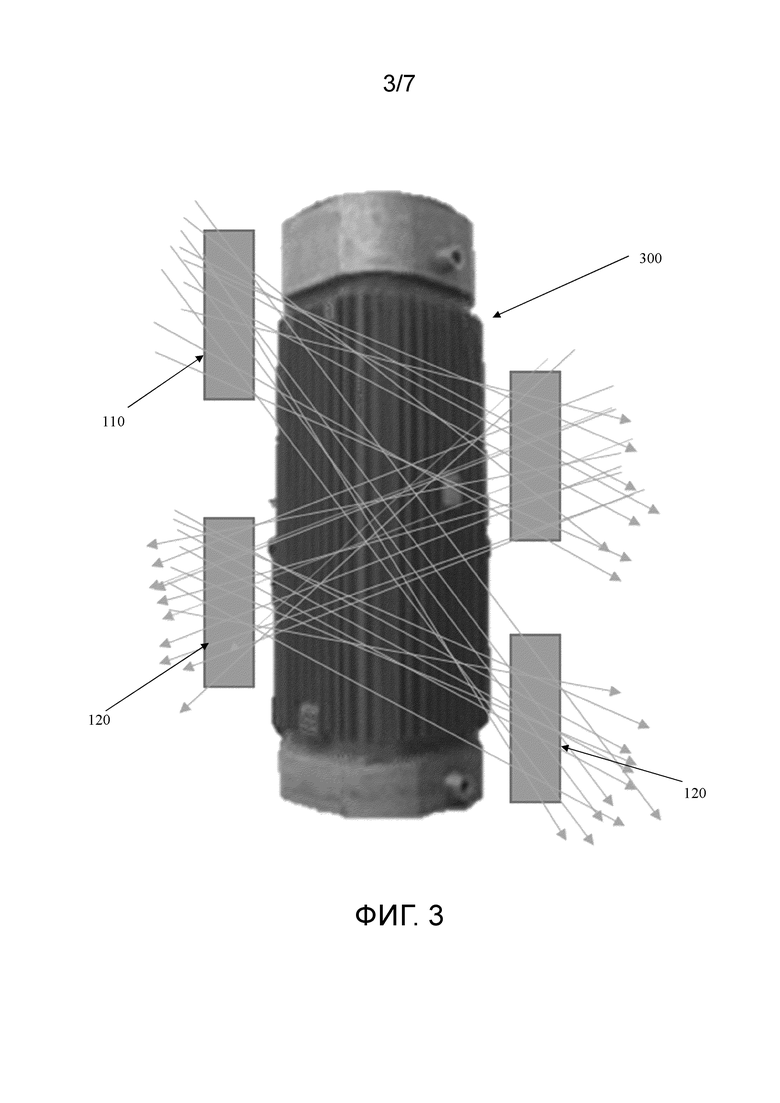
[0014] Фиг. 3 схематично иллюстрирует примерное размещение передвижных узлов в вертикальном направлении на виде сбоку.
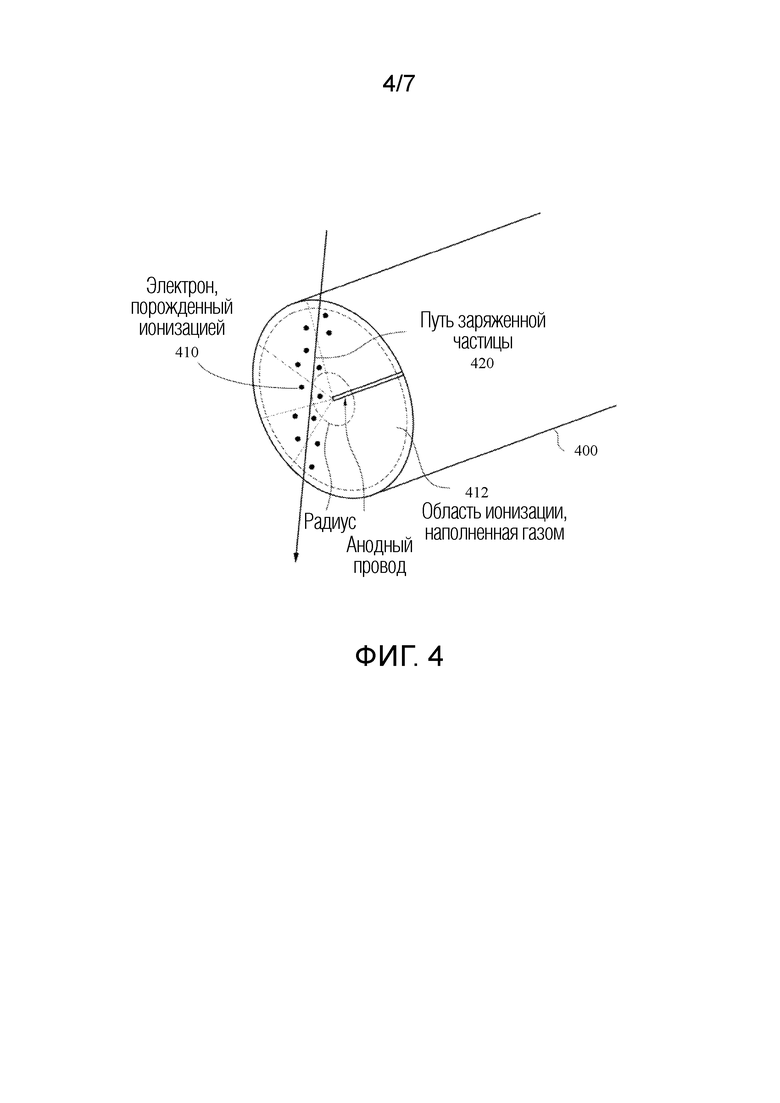
[0015] Фиг. 4 иллюстрирует примерную конструкцию дрейфовой трубки, которую можно использовать для реализации раскрытой технологии.
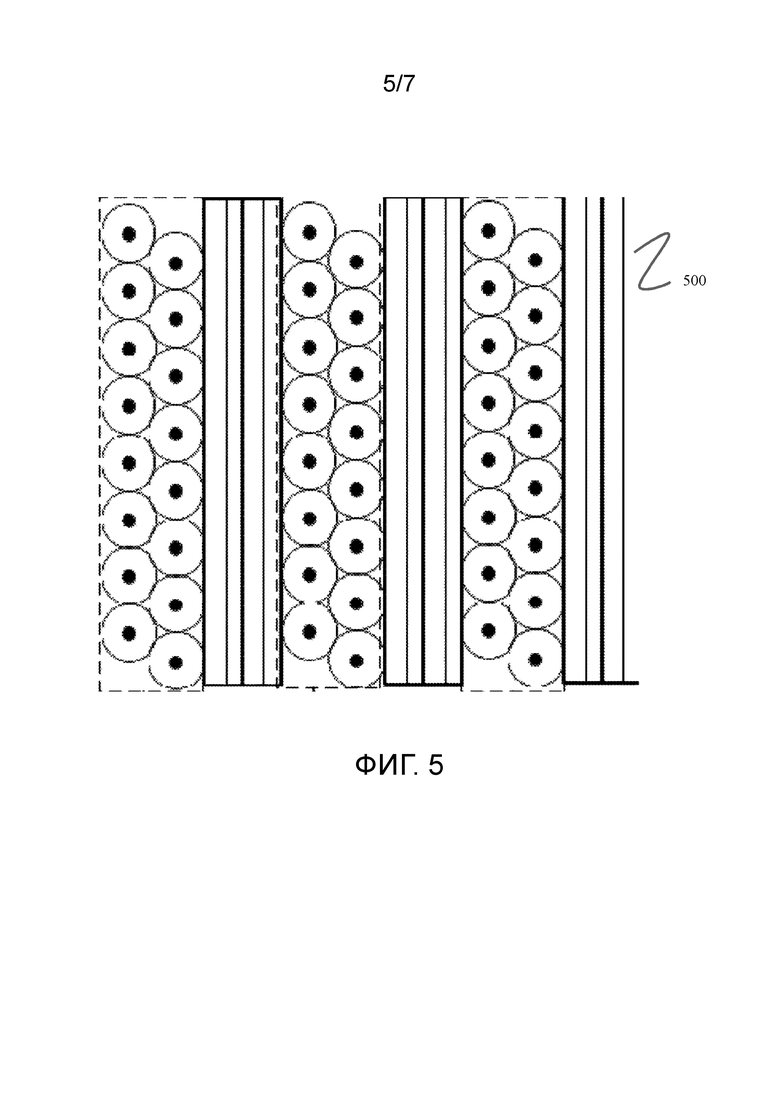
[0016] Фиг. 5 иллюстрирует примерную конструкцию модуля блока чувствительных детекторов, включающего в себя множество дрейфовых трубок, которые можно использовать для реализации раскрытой технологии.
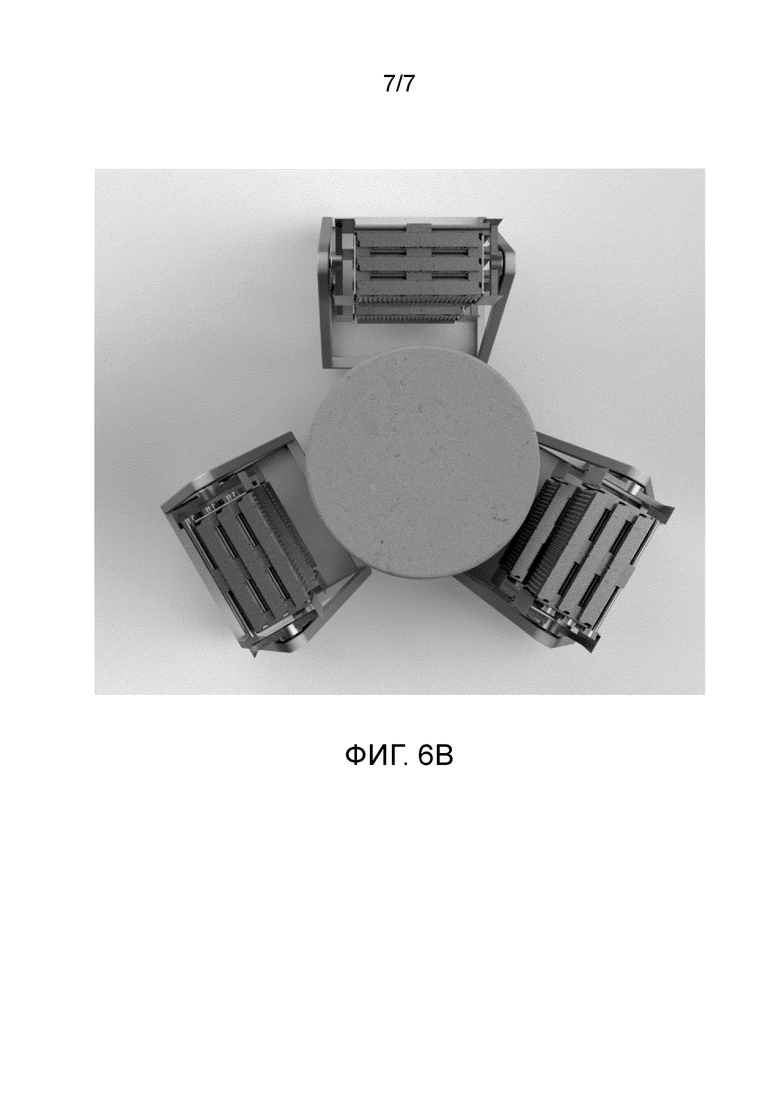
[0017] Фиг. 6A и 6B показывают два разных вида примерной компоновки передвижных узлов с детекторами заряженных частиц, которые располагаются с трех сторон от подлежащего инспектированию объекта 300 в треугольной геометрии.
ПОДРОБНОЕ ОПИСАНИЕ
[0018] Раскрытые оборудование и методы для инспектирования материалов, включающие в себя использование передвижных детекторов заряженных частиц, можно использовать в широком диапазоне применений. Одним из таких применений является детектирование специальных ядерных материалов.
[0019] Радиоактивные тяжелые металлы в большом количестве ежегодно вырабатываются ядерными реакторами по всему миру, пополняя постоянно увеличивающийся мировой запас ядерных отходов. Эти высокорадиоактивные отходы обычно находятся на долговременном хранении в больших, хорошо экранированных контейнерах. Удержание материала в таких контейнерах очень важно хотя бы по двум причинам: 1) ядерные отходы являются чрезвычайно токсичным материалом, с чрезвычайно долгоживущими радиоактивными компонентами, и поэтому представляют большую угрозу для общественной безопасности, не будучи ограничены в распространении; 2) компоненты ядерных отходов являются специальными ядерными материалами, которые можно использовать при создании ядерного оружия. В настоящее время инспекторы по международной ядерной безопасности не обладают самостоятельным способом проверки количества реакторного топлива, хранящегося в запечатанном контейнере. Измерения углов рассеяния мюонов космических лучей, проходящих через контейнер для хранения, можно использовать для того, чтобы измерять количество специального ядерного материала в контейнере и определять, не пропали ли использованные топливные сборки, не вскрывая контейнер. Раскрытые здесь устройство, система и способы предоставляют потенциальное решение этой давно существующей проблемы международной ядерной безопасности, обеспечивая безопасный, надежный, эффективный и экономически целесообразный способ инспектирования. Раскрытые здесь устройство, система и способы позволяют решить застарелую проблему учета ядерных материалов в международной ядерной безопасности. Кроме того, они могут дополнительно помочь в оценивании конструктивной целостности контейнера, а также конструктивной целостности хранящихся в нем твэлов.
[0020] Технические признаки, описанные в этом патентном документе, можно использовать для построения различных систем детектирования частиц. Например, система детектирования частиц может включать в себя зону удержания объекта для размещения подлежащего инспектированию объекта, первый комплект чувствительных к положению детекторов мюонов, расположенных с первой стороны от зоны удержания объекта, для измерения положений и направлений падающих мюонов к зоне удержания объекта, второй комплект чувствительных к положению детекторов мюонов, расположенных со второй стороны от зоны удержания объекта, противоположной первой стороне, для измерения положений и направлений выходящих мюонов, покидающих зону удержания объекта, и блок обработки сигналов, который может включать в себя, например, микропроцессор, для приема данных измеренных сигналов входящих мюонов от первого комплекта чувствительных к положению детекторов мюонов и измеренных сигналов выходящих мюонов от второго комплекта чувствительных к положению детекторов мюонов. В качестве примера, каждый из первого и второго комплектов детекторов частиц может быть реализован включающим в себя дрейфовые трубки, выполненные с возможностью производить по меньшей мере три измерения положения заряженной частицы в первом направлении и по меньшей мере три измерения положения заряженной частицы во втором направлении, отличном от первого направления. Блок обработки сигналов выполнен с возможностью анализа характеристик рассеяния мюонов, обусловленных рассеянием мюонов в материалах в зоне удержания объекта, на основании измеренных положений входа и выхода и направлений мюонов для получения томографического профиля или пространственного распределения центров рассеяния в зоне удержания объекта. Полученные томографический профиль или пространственное распределение центров рассеяния можно использовать для выявления наличия или отсутствия одного или более объектов в зоне удержания объекта, таких как, например, материалы с высокими атомными числами, включая ядерные материалы или устройства. Каждый чувствительный к положению детектор мюонов можно реализовать в различных конфигурациях, включающих в себя дрейфовые ячейки, например, дрейфовые трубки, наполненные газом, который может ионизироваться мюонами. В такой системе мюоны, порождаемые естественными космическими лучами, могут использоваться как источник мюонов для детектирования одного или более объектов в зоне удержания объекта.
[0021] Другой пример системы детектирования частиц на основании признаков, описанных в этой заявке, может включать в себя зону удержания объекта для размещения подлежащего инспектированию объекта, первый комплект детекторов частиц, расположенный с первой стороне от зоны удержания объекта, для измерения падающих мюонов к зоне удержания объекта и для реакции на нейтрон с измерением нейтронов, и второй комплект детекторов частиц, расположенный со второй стороны от зоны удержания объекта, противоположной первой стороне, для измерения выходящих мюонов, покидающих зону удержания объекта, и для реакции на нейтрон с измерением нейтронов. Каждый детектор частиц включает в себя чувствительный к мюонам материал для измерения мюонов и чувствительный к нейтронам материал для измерения нейтронов и способен одновременно измерять как мюоны, так и нейтроны. Эта система включает в себя блок обработки сигналов для приема и обработки данных измеренных сигналов от первого и второго комплектов детекторов для получения результата измерения одного или более объектов в зоне удержания объекта. В одном варианте реализации каждый детектор частиц может представлять собой дрейфовую трубку, наполненную смесью мюоночувствительного газа и нейтроночувствительного газа, и действует как чувствительный к положению детектор. Каждый комплект детекторов частиц может быть выполнен как комплект чувствительных к положению детекторов для измерения положений и направлений принятых мюонов. Например, каждый из первого и второго комплектов детекторов частиц может быть реализован включающим в себя дрейфовые трубки, выполненные с возможностью производить по меньшей мере три измерения положения заряженной частицы в первом направлении и по меньшей мере три измерения положения заряженной частицы во втором направлении, отличном от первого направления. Блок обработки сигналов может быть выполнен с возможностью получения томографического профиля или пространственного распределения материала одного или более объектов в зоне удержания объекта, например, материалов с высокими атомными числами, включая ядерные материалы или устройства. В такой системе порождаемые естественными космическими лучами мюоны могут использоваться как источник мюонов для детектирования одного или более объектов в зоне удержания объекта. В некоторых вариантах применения такая система может быть выполнена с возможностью использования одного или более искусственных источников частиц для создания мюонов или нейтронов для детектирования одного или более объектов в зоне удержания объекта.
[0022] Томография космическими лучами представляет собой метод, предусматривающий применение множественного кулоновского рассеяния порождаемых космическими лучами сильнопроникающих мюонов для осуществления неразрушающего контроля материала без использования искусственного излучения. Земля подвергается непрерывной бомбардировке энергичными стабильными частицами, по большей части протонами, приходящими из глубокого космоса. Эти частицы взаимодействуют с атомами в верхних слоях атмосферы, порождая ливни частиц, которые включают в себя много короткоживущих пионов, которые, распадаясь, порождают более долгоживущие мюоны. Мюоны взаимодействуют с веществом в основном посредством кулоновской силы, не участвуя в ядерных взаимодействиях и излучая гораздо менее легко, чем электроны. Они теряют энергию медленно, только через электромагнитные взаимодействия. Следовательно, большой процент порождаемых космическими лучами мюонов достигает поверхности Земли в виде сильнопроникающего заряженного излучения. Мюонный поток на уровне моря составляет примерно 1 мюон на см2 в минуту. По мере прохождения мюона через материал кулоновское рассеяние на зарядах субатомных частиц возмущает его траекторию. Полное отклонение зависит от нескольких свойств материала, но в основном от атомного числа, Z, ядер. Наибольшее влияние на траектории оказывают материалы, хорошо защищающие от гамма-излучения (например, свинец и вольфрам), и специальный ядерный материал (SNM), то есть уран и плутоний, в отличие от материалов, из которых состоят обычные объекты, такие как вода, пластик, алюминий и сталь.
[0023] Каждый мюон несет информацию об объектах, в которые он проник, и измеряя рассеяние множественных мюонов, можно зондировать свойства этих объектов. Материал с высоким атомным числом Z и высокой плотностью можно детектировать и идентифицировать в том случае, когда материал располагается внутри вещества с низким Z и средним Z. Кулоновское рассеяние на атомных ядрах приводит к очень большому числу отклонений заряженных частиц на малый угол по мере их прохождения через вещество. Энрико Ферми сформулировал и решил уравнение переноса, которое описывает этот процесс с хорошим приближением. В результате получилась функция коррелированного гауссова распределения для смещения и изменения угла траектории, которая зависит от плотности и атомного заряда материала. Ширина функции распределения обратно пропорциональна импульсу частицы и квадратному корню истинной плотности материала, измеренной радиационных длинах.
[0024] Фиг. 1-5 иллюстрируют примеры различных признаков раскрытых здесь оборудования и методов для инспектирования материалов, включающих в себя использование передвижных детекторов заряженных частиц. Некоторые аспекты технических признаков раскрыты в примерах, приведенных в других патентах США, включая патент США № 7633062 под названием «RADIATION PORTAL MONITOR SYSTEM AND METHOD», патент США № 8288721 под названием «IMAGING AND SENSING BASED ON MUON TOMOGRAPHY», публикацию патентной заявки PCT № WO 2008/123892 A2 под названием «PARTICLE DETECTION SYSTEMS AND METHODS», публикацию патентной заявки PCT № WO 2008/118208 A2 под названием «DETERMINATION OF TRAJECTORY OF A CHARGED PARTICLE», публикацию патентной заявки PCT № WO 2008/140559 A2 под названием «MEASURING MOMENTUM FOR CHARGED PARTICLE TOMOGRAPHY» и патент США № 8536527 под названием «IMAGING BASED ON COSMIC-RAY PRODUCED CHARGED PARTICLES». Каждый из вышеперечисленных патентов и каждая из вышеперечисленных патентных публикаций в полном объеме включена в состав раскрытия этого патентного документа по ссылке.
[0025] В примерном варианте осуществления устройства детекторы заряженных частиц могут быть реализованы в виде газонаполненных дрейфовых трубок 400, как показано, например, на фиг. 4, для детектирования заряженных частиц 410. Дрейфовые трубки обеспечивают надежное и недорогое покрытие зоны для измерения положений заряженных частиц, взаимодействующих с газом 412 внутри них. В примерном варианте осуществления устройства дрейфовые трубки запечатаны и наполнены негорючим газом 412 в качестве меры безопасности для работы в присутствие специальных ядерных материалов. Можно использовать другие детекторные технологии вместо дрейфовых трубок или совместно с ними как часть системы детектирования. Например, предложенное устройство может использовать детекторы на основе кремниевой пластины, узкозазорной камеры (TGC) и толстого газового электронного умножителя (THGEM).
[0026] В типичном варианте осуществления системы на основе дрейфовых трубок, используемой в некоторых конструкциях, дрейфовые трубки 400 объединены в модули 500 дрейфовых трубок, например, показанные на фиг. 5. Трубки 400 в модуле 500 могут быть склеены друг с другом или механически объединены другими средствами. Трубки 400, объединенные в модуль 500, подключены к одному и тому же электронному блоку. В примерном варианте осуществления единый модуль 500 включает в себя 24 дрейфовые трубки 400, размещенные в два слоя с 12 дрейфовыми трубками 400 в каждом слое.
[0027] В примере, проиллюстрированном на фиг. 5, дополнительно показано, что модули 500 дрейфовых трубок механически объединены в детектирующие блоки, также известные как супермодули. В примерном варианте осуществления супермодуль содержит 12 модулей 500 дрейфовых трубок, причем 6 модулей 500 дрейфовых трубок ориентировано в направлении X, и 6 модулей 500 дрейфовых трубок ориентировано в направлении Y, перпендикулярном направлению X. В каждом направлении существует 3 слоя модулей 500, разделенные модулями 500, ориентированными в перпендикулярном направлении. Каждый модуль 500 может быть конструктивно одинаковым, так что все модули 500 являются взаимозаменяемыми. Использование модулей 500 одинаковой конструкции упрощает изготовление и обеспечивает масштабируемое производство. Модули 500 в супермодуле не скреплены друг с другом на постоянной основе и могут быть разделены и повторно объединены без разрушения каких-либо модулей 500 или каких-либо соединений между модулями 500. В описанном здесь примерном варианте осуществления предусмотрено 12 слоев дрейфовых трубок, по 6 в каждом направлении, с 24 трубками 400 в каждом слое. В этом примере супермодуль включает в себя 288 трубок 400 и 12 электронных блоков (не показаны). Электронные блоки обычно соединены друг с другом через концентраторы для уменьшения количества внешних кабельных соединений для супермодуля.
[0028] В примерном варианте осуществления с использованием вышеуказанных детекторных модулей 500 первый трековый блок детекторов частиц располагается для приема входящих заряженных частиц, которые проходят через объект, и для измерения положений и направлений заряженных частиц, которые проходят через объект, при этом позволяя заряженным частицам проходить через себя. Кроме того, второй чувствительный трековый блок детекторов частиц, расположенный относительно первого трекового детектора частиц и представляющего интерес объема, содержащего объект инспектирования, выполнен с возможностью принимать выходящие заряженные частицы, которые проходят через первый чувствительный трековый блок детекторов частиц и проходят через объект инспектирования, и измерять положение и направление выходящих заряженных частиц.
[0029] Тогда первый и второй чувствительные трековые блоки могут быть включены в механическую опорную конструкцию в качестве узла. Узел может быть передвижным, а положения каждого блока могут регулироваться. Два или более из передвижных узлов могут быть расположены в правильном геометрическом рисунке вокруг объекта инспектирования. Первый и второй чувствительные трековые блоки детекторов частиц дополнительно могут содержать дрейфовые трубки или другие детекторы, способные детектировать заряженные частицы.
[0030] Процессор, подключенный к обоим, первому и второму, чувствительным трековым блокам детекторов частиц, включен в состав для обработки информации от этих блоков для выдачи оценки пространственной карты атомного числа и плотности объекта.
[0031] В среде, которая имеет сильное поле излучения, система использует триггер совпадения в качестве фильтра для отделения сигналов от заряженных частиц от индуцированных гамма-излучением сигналов. Триггер реализуется в программно-аппаратном обеспечении электронного блока, присоединенного к дрейфовым трубкам. Триггер использует совпадение во временном окне между трубками, которые подключены к одной и той же электронной плате. Присутствие более чем одного сигнала во временном окне является первичным показателем заряженных частиц триггера. Геометрическое размещение выбранных трубок в модуле относительно друг друга и представляющего интерес объема обеспечивает вторичный показатель заряженных частиц. Сигналы от трубок идентифицируются как генерируемые одной и той же заряженной частицей, когда присутствуют как первичный показатель, так и вторичный показатель. Сигналы, у которых отсутствует либо первичный, либо вторичный показатель, отфильтровываются электроникой.
[0032] Раскрытая здесь система может быть реализована с использованием разных чисел передвижных узлов в зависимости от размера инспектируемого объекта (обычно контейнера для сухого хранения) и требований инспектирования. Минимальное число передвижных узлов равно двум, и они обычно устанавливаются с противоположных сторон объекта инспектирования.
[0033] В типичном примерном варианте осуществления системы передвижные узлы устанавливаются вокруг объекта инспектирования в правильном рисунке, образующем правильную геометрическую фигуру (обычно треугольник, квадрат, пятиугольник или шестиугольник), как следует из вышесказанного. После размещения узлы закрепляются на месте во избежание дальнейшего перемещения в ходе сбора данных.
[0034] В типичном примерном варианте осуществления передвижные узлы будут соединяться друг с другом после размещения в надлежащем положении жесткими металлическими прутками, чтобы гарантировать жесткость геометрической формы системы в ходе сбора данных. Система также может включать в себя переносной навес и пластмассовые ограждения для обеспечения защиты от неблагоприятных погодных условий, например, снега, сильного ветра и/или прямого солнечного света.
[0035] Положение чувствительных блоков относительно друг друга определяется с помощью процесса геометрической калибровки на основании измерения треков заряженных частиц. Калибровка осуществляется в процессе сбора данных, и ее результаты используются для визуализации объекта инспектирования.
[0036] В основанных на дрейфовых трубках вариантах осуществления системы улучшенное измерение треков частиц достигается калибровкой функции преобразования время-радиус на основании собранных данных. Калибровка осуществляется итерационно в процессе сбора данных.
[0037] Раскрытые примерные варианты осуществления предусматривают конструкцию системы, которая обеспечивает 3D визуализацию обследуемого объема с использованием заряженных частиц космических лучей без какого-либо искусственного источника излучения.
[0038] Типичным примерным объектом инспектирования для этого раскрытия является запечатанный контейнер для сухого хранения со стержнями отработавшего ядерного топлива внутри него. Хотя конструкция и реализация системы оптимизирована для использования с этим конкретным типом объектов, ее также можно использовать для визуализации других типов объектов.
[0039] Раскрытая система позволяет использовать информацию, обеспечиваемую взаимодействием заряженных частиц космических лучей с чувствительными детекторами, генерирующими электрические сигналы в качестве реакции на взаимодействие заряженных частиц с материалом чувствительного детектора.
[0040] Космические лучи, используемые раскрытой здесь системой, также известны в литературе как вторичные космические лучи. Эти частицы создаются при взаимодействиях первичных космических лучей в атмосфере.
[0041] Двумя главными компонентами вторичных космических лучей на уровне моря являются электроны и мюоны. Другие заряженные частицы, присутствующие во вторичных космических лучах в значительно меньших количествах, представляют собой протоны, ионы, заряженные мезоны, заряженные тяжелые барионы и таоны. Все эти частицы могут создавать электрические сигналы при взаимодействии с материалом чувствительных детекторов. Однако, ввиду их малых количеств и относительно низкой проникающей способности, эти частицы можно игнорировать в ходе разработки и эксплуатации раскрытой системы.
[0042] Высокоэнергичные электроны могут генерировать в чувствительных детекторах треки, аналогичные трекам, создаваемым мюонами, однако, ввиду своей относительно низкой проникающей способности, электроны с весьма небольшой вероятностью проникают в хорошо экранированные плотные объекты инспектирования, такие как контейнеры для сухого хранения с отработавшими топливными стержнями внутри или без них. Поскольку все электроны останавливаются в толстых объектах, они не могут использоваться по назначениям рассматриваемого применения.
[0043] Положительно и отрицательно заряженные мюоны, порождаемые при взаимодействиях первичных космических лучей в атмосфере, обеспечивают чувствительный зонд для детектирования и визуализации различных материалов, включая, но не ограничиваясь ими, специальные ядерные материалы. Сигналы, вырабатываемые в чувствительных детекторах вследствие взаимодействия этих мюонов с материалом чувствительного детектора, используются в раскрытой системе в вышеупомянутых целях.
[0044] Когда заряженная частица движется через вещество, она теряет энергию преимущественно за счет взаимодействия с атомными электронами в материале. Эта потеря энергии приблизительно прямо пропорциональна эффективной толщине электронного облака, пересекаемого при прохождении через материал. Поскольку заряд этих атомных электронов сбалансирован равным числом протонов в атомных ядрах и поскольку в большинстве случаев число протонов в атомном ядре приблизительно равно числу нейтронов, можно утверждать, что толщина пересекаемого электронного облака примерно пропорциональна массовой плотности пересекаемого материала. Атомы водорода являются исключением из этого правила, поскольку в их ядрах отсутствуют нейтроны. Поэтому они имеют вдвое больше электронов на единицу массы.
[0045] Детектирование и измерение заряженных частиц по мере их прохождения через представляющий интерес объект имеют много применений. Одно примерное применение состоит в детектировании ядерного материала в контейнерах для отработавшего ядерного топлива. Под отработавшим ядерным топливом понимают стопки урановых таблеток, заключенные в металлические стержни, которые использовались в качестве источника энергии ядерного реактора. Измерения углов рассеяния мюонов космических лучей, проходящих через контейнер для хранения, можно использовать для того, чтобы измерять количество специального ядерного материала в контейнере и определять, не пропали ли использованные топливные сборки, не вскрывая контейнер.
[0046] Обращаясь к фиг. 3, в примерном варианте осуществления для реализации раскрытых технических признаков два или более первых трековых блоков 110 и 120 детекторов частиц располагаются вблизи первых положений подлежащего детектированию объекта, например, контейнера 300 для отработавшего ядерного топлива, и два или более вторых трековых блоков 110 и 120 детекторов частиц располагаются вблизи вторых положений того же объекта так, что эти два или более первых и вторых трековых блоков 110 и 120 детекторов частиц вблизи подлежащего детектированию объекта или контейнера 300 для отработавшего ядерного топлива могут быть спарены для детектирования падающих на и выходящих из объекта заряженных частиц для получения изображений объекта инспектирования.
[0047] В частности, как показано на фиг. 3, первый трековый блок 110 детекторов частиц располагается у верхней левой стороны подлежащего детектированию объекта, например, контейнера 300 для отработавшего ядерного топлива, для приема входящих заряженных частиц 420, которые проходят через контейнер 300 для отработавшего ядерного топлива. Детекторы 400 внутри первого трекового блока 110 детекторов частиц выполнены с возможностью измерять положение и направление заряженных частиц 420, которые проходят через оболочку топлива, например, позволяя заряженным частицам 420 проходить через него. С той же левой стороне подлежащего детектированию объекта, например, контейнера 300 для отработавшего ядерного топлива, другой первый трековый блок 120 детекторов частиц располагается ниже относительно первого трекового блока 110 детекторов частиц. С противоположной стороны относительно представляющего интерес объема, например, контейнера 300 для отработавшего ядерного топлива, содержащего отработавшее ядерное топливо (не показано), вторые трековые блоки 110 и 120 детекторов частиц располагаются вблизи контейнера 300 для отработавшего ядерного топлива таким образом, чтобы принимать выходящие заряженные частицы 420, которые проходят через первые трековые блоки 110 и 120 детекторов частиц и проходят через контейнер 300 и отработавшее ядерное топливо в нем, и измерять положение и направление этих выходящих заряженных частиц 420.
[0048] На фиг. 3 также показано, что дополнительные трековые блоки детекторов частиц могут располагаться вокруг контейнера 300 для отработавшего ядерного топлива для обеспечения дополнительной способности детекторования. В некоторых вариантах реализации такие дополнительные трековые блоки детекторов частиц могут располагаться вокруг контейнера 300 для отработавшего ядерного топлива парами, причем два спаренных трековых блока детекторов частиц в каждой паре располагаются с противоположных сторон от контейнера 300 для отработавшего ядерного топлива. Разные пары могут располагаться в разных положениях вокруг контейнера 300 для отработавшего ядерного топлива в желаемой пространственной конфигурации для достижения желаемого покрытия детектирования излучения, выходящего из контейнера 300 для отработавшего ядерного топлива. Заметим, что размещение таких трековых блоков детекторов частиц на передвижных узлах позволяют регулировать или перемещать положения трековых блоков детекторов частиц вокруг контейнера 300 для отработавшего ядерного топлива, чтобы удовлетворять различным нуждам или целям инспектирования.
[0049] На фиг. 3 дополнительно показано, что каждый трековый блок детекторов частиц может образовывать пару с более чем одним трековым блоком детекторов частиц с другой стороны объекта. В качестве примера, трековый блок 120 детекторов частиц, показанный с правой стороны на фиг. 3, образует пару как с трековым блоком 110 детекторов частиц, так и с трековым блоком 120 детекторов частиц, показанными с левой стороны на фиг. 3. Поскольку трековые блоки детекторов частиц подключены к процессору и поскольку сигналы от всех трековых блоков детекторов частиц синхронизируются во времени, а также поскольку положения всех трековых блоков детекторов частиц известны из позиционной калибровки, каждый из отдельных трековых блоков детекторов частиц может различать мюоны, проходящие через этот отдельный блок, а также через любой другой трековый блок детекторов частиц, установленный вокруг объекта. Объединение треков частиц, выданных разными трековыми блоками детекторов частиц, позволяет провести реконструкцию 3D томографического изображения содержимого контейнера.
[0050] В ходе работы выходные сигналы трековых блоков детекторов частиц направляются в модуль обработки и реконструкции изображений для использования информации об измеренных положениях, направлениях и временах падающих заряженных частиц, таких как мюоны, и выходящих заряженных частиц для реконструкции томографического профиля центров рассеяния внутри объекта с получением томографических изображений внутри инспектируемого объекта.
[0051] На фиг. 1 показан пример механической опорной конструкции 130 для поддержания двух или более трековых блоков детекторов частиц, например, первого трекового блока 110 детекторов частиц и второго трекового блока 120 детекторов частиц в желаемых положениях относительно друг друга, где эти блоки могут функционировать, как описано выше. Механическая опорная конструкция 130 может быть передвижным узлом с опорными колесами для перемещения вокруг. Такие колеса или другие механизмы перемещения могут быть моторизованными для размещения опорной конструкции 130 в желаемом положении вблизи подлежащего инспектированию объекта. Механическая опорная конструкция 130 может включать в себя регулируемые или подвижные приспособления для монтажа первого трекового блока 110 детекторов частиц и второго трекового блока 120 детекторов частиц с обеспечением возможности регулировки своих положений, например, своих высот.
[0052] Возвращаясь к фиг. 1, два трековых блока 110 и 120 детекторов частиц с левой стороны контейнера 300 для отработавшего ядерного топлива могут быть установлены на первой механической опорной конструкции 130, подлежащей размещению в желаемом положении с левой стороны контейнера 300 для отработавшего ядерного топлива, и два трековых блока 110 и 120 детекторов частиц с правой стороны контейнера 300 для отработавшего ядерного топлива могут быть установлены на второй механической опорной конструкции 130, подлежащей размещению в желаемом положении с правой стороны контейнера 300 для отработавшего ядерного топлива (на разных высотах, как проиллюстрировано). Первая и вторая механические опорные конструкции 130 могут быть расположены в желаемых известных положениях и их трековые блоки 110 и 120 детекторов частиц могут быть расположены на желаемых известных высотах, так что четыре трековых блока 110 и 120 детекторов частиц с двух сторон контейнера 300 для отработавшего ядерного топлива известны и используются для калибровки обработки визуализации измеренных положений и направлений заряженных частиц, входящих в контейнер 300 для отработавшего ядерного топлива и выходящих из него. Калиброванные измеренные положения и направления (углы падения и выхода) и информация о временах детектированных заряженных частиц используются для реконструкции томографических изображений внутри области объекта.
[0053] Процессор (не показан) может быть подключен и к первому чувствительному трековому блоку 110 детекторов частиц, и ко второму чувствительному трековому блоку 120 детекторов частиц для обработки информации от обоих чувствительных блоков для выдачи оценки пространственной карты атомного числа и плотности ядерного топлива внутри контейнера. Способ обработки данных в электронике может дополнительно включать в себя отфильтровывание сигналов, не идентифицированных как принадлежащие трекам заряженных частиц. Первый показатель основан на временном совпадении сигналов в окне совпадения. Размер окна совпадения может быть дополнительно установлен независимо для каждого модуля в программно-аппаратном обеспечении каждого соответствующего электронного блока. Размер окна совпадения дополнительно оптимизируется на основании свойств хронирования чувствительных детекторов в модуле и внешнего поля излучения в положении размещения модуля. Второй показатель дополнительно основан на положениях выбранных чувствительных детекторов. Второй показатель дополнительно оптимизируется на основании положения выбранных чувствительных детекторов в модуле и относительного положения модуля относительно объекта инспектирования.
[0054] Механическая опорная конструкция 130 также может включать в себя два или более передвижных узлов 100, каждый из которых обеспечивает подвижность и опору двух чувствительных блоков 110, 120 детекторов, установленных в вертикальной ориентации один над другим, с промежутком между ними, как в примерном варианте осуществления, показанном на фиг. 1. Другие механические элементы, придающие геометрическую жесткость комплекту передвижных узлов в ходе инспектирования, и другие механические элементы, обеспечивающие защиту от непогоды для передвижных механических узлов для обеспечения работы системы при переменных погодных условиях вне помещения.
[0055] Другие механические элементы могут включать в себя жесткие металлические прутки, соединяющие между собой передвижные узлы для обеспечения повышенной геометрической жесткости системы, и передвижные узлы дополнительно организованы в правильный геометрический рисунок вокруг объекта инспектирования.
[0056] Другие механические элементы дополнительно включают в себя переносной навес или навесы для защиты от непогоды передвижных узлов 100. Высота монтажа верхних чувствительных блоков в передвижном узле дополнительно является механически регулируемой. Размер промежутка между двумя чувствительными блоками детекторов в одном и том же передвижном узле 100 является механически регулируемым.
[0057] Как показано на фиг. 2, например, число передвижных узлов 100 в системе выбирается на основании размера объекта инспектирования и других требований к инспектированию. Передвижные узлы 100 располагаются вокруг подлежащего инспектированию объекта 300 до начала сбора данных. Геометрическая калибровка может быть основана на собранных результатах измерения треков входящих и выходящих частиц. Для каждого детектора на основе дрейфовой трубки в системе может осуществляться итерационная калибровка функции отклика время-радиус. В других вариантах осуществления могут быть включены опорные подсистемы, необходимые для обеспечения надежной работы вышеописанных подсистем.
[0058] В одном примерном варианте осуществления детекторы заряженных частиц дополнительно содержат дрейфовые трубки 400. Высоты, на которых устанавливаются чувствительные блоки, выбираются на основании моделирования входящего мюонного потока космических лучей и требований к инспектированию. Заряженные частицы далее идентифицируются в каждом модуле на основании двух показателей треков частиц.
[0059] Другие детекторы заряженных частиц могут дополнительно включать детекторы на основе кремниевой пластины, узкозазорной камеры (TGC) и толстого газового электронного умножителя (THGEM).
[0060] Для работы в сильном поле излучения система использует триггер совпадения в качестве фильтра для отделения сигналов от заряженных частиц от индуцированных гамма-излучением сигналов. Триггер реализуется в программно-аппаратном обеспечении электронного блока, подключенного к дрейфовым трубкам. Триггер использует совпадение во временном окне между трубками, которые подсоединены к одной и той же электронной плате. Присутствие более чем одного сигнала во временном окне является первичным показателем заряженных частиц триггера. Геометрическое размещение выбранных трубок в модуле относительно друг друга и представляющего интерес объема обеспечивают вторичный показатель заряженных частиц. Сигналы от трубок идентифицируются как генерируемые одной и той же заряженной частицей, когда присутствуют как первичный показатель, так и вторичный показатель. Сигналы, у которых отсутствует либо первичный, либо вторичный показатель, отфильтровываются электроникой.
[0061] Размер временного окна совпадения устанавливается в электронике по команде. Конкретный размер временного окна оптимизируется в зависимости от свойств газа и интенсивности внешнего поля излучения. В качестве примера, размер окна совпадения может составлять 500 нс для системы детектирования на основе дрейфовых трубок. Размер окна совпадения может быть одинаковым или отличаться для разных модулей дрейфовых трубок в одной и той же системе.
[0062] Вторичный показатель, используемый триггером заряженных частиц, является конфигурируемым. Он оптимизируется на основании относительных положений трубок в модуле и размещения модуля относительно представляющего интерес объема. В примерном варианте осуществления системы может потребоваться выбирать трубки в модуле из разных слоев. Обычно реализуются более сложные критерии выбора. Критерии выбора могут быть одинаковыми или разными для разных модулей в одной и той же системе.
[0063] Чувствительные блоки (супермодули) 500 системы установлены на подвижных платформах 100, как показано на фиг. 1 и на фиг. 5, чтобы инспектирование и визуализацию представляющего интерес объема 300 можно было производить, не перемещая объекты инспектирования (обычно контейнеры для сухого хранения) в представляющем интерес объеме.
[0064] Каждая подвижная платформа раскрытой системы несет два чувствительных блока (супермодуля) 500, установленных вертикально, один над другим на дне, с промежутком, разделяющим их в вертикальном направлении. Высоты обоих супермодулей 500 могут быть изменены, и размер промежутка также может меняться. В одном примерном варианте осуществления системы супермодули 500 имеют приблизительно квадратное сечение и выполнены из трубок длиной 4 фута. Промежуток между супермодулями 500 может составлять 4 фута в вертикальном направлении, и весь передвижной узел может иметь высоту 12 футов или более. Эти величины приведены здесь лишь в качестве примера, и фактические величины могут значительно отличаться для конкретных вариантов осуществления системы.
[0065] Высоту монтажа можно регулировать для каждого супермодуля 500. Эту высоту можно регулировать или оптимизировать для конкретного варианта осуществления системы и конкретного объекта инспектирования. Оптимизация осуществляется на основании размера объекта инспектирования и моделирования распределения потока космических лучей по направлениям, выражаемым зенитным углом.
[0066] Раскрытая здесь система может включать в себя разные числа передвижных узлов 100 в зависимости от размера инспектируемого объекта 300 (обычно контейнера для сухого хранения) и требований к инспектированию. Минимальное число передвижных узлов равно двум, и они обычно устанавливаются с противоположных сторон от объекта инспектирования.
[0067] В типичном примерном варианте осуществления системы передвижные узлы 100 устанавливаются вокруг объекта инспектирования в правильном рисунке, образующем правильную геометрическую фигуру (обычно треугольник, квадрат, пятиугольник или шестиугольник), как следует из вышесказанного и показано, например, на фиг. 2. После размещения узлы закрепляются на месте во избежание дальнейшего перемещения в ходе сбора данных.
[0068] В частности, на фиг. 2 проиллюстрированы три разных примера. В верхней левой части фиг. 2 показан первый пример, где передвижные узлы 100 с детекторами заряженных частиц располагаются с трех сторон подлежащего инспектированию объекта 300. Два разных вида этого примера показаны на фиг. 6A (вид в перспективе сбоку) и 6B (вид сверху). В верхней правой части фиг. 2 показан второй пример, где передвижные узлы 100 с детекторами заряженных частиц располагаются с четырех сторон подлежащего инспектированию объекта 300. В нижней части фиг. 2 показан третий пример, где передвижные узлы 100 с детекторами заряженных частиц располагаются с шести сторон подлежащего инспектированию объекта 300.
[0069] В типичном примерном варианте осуществления передвижные узлы 100 соединяются друг с другом после размещения в надлежащем положении жесткими металлическими прутками, чтобы гарантировать жесткость геометрической формы системы в ходе сбора данных. Система также может включать в себя переносной навес и пластмассовые ограждения для обеспечения защиты от неблагоприятных погодных условий, например, снега, сильного ветра и/или прямого солнечного света.
[0070] Относительное положение чувствительных блоков относительно друг друга определяется в процессе геометрической калибровки на основании измерения треков заряженных частиц. Калибровка осуществляется в процессе сбора данных, и ее результаты используются для визуализации объекта инспектирования.
[0071] Обращаясь к фиг. 4, в основанных на дрейфовых трубках вариантах осуществления системы улучшенное измерение треков частиц достигается калибровкой функции преобразования время-радиус на основании собранных данных. Калибровка осуществляется итерационно в процессе сбора данных.
[0072] В этом патентном документе слово «примерный» используется в смысле служащий в качестве примера, экземпляра или иллюстрации. Любой вариант осуществления или конструкции, описанный здесь как «примерный», не обязательно следует рассматривать как предпочтительный или преимущественный над другими вариантами осуществления или системами. Напротив, использование слова «примерный» призвано представлять принципы конкретным образом. Высота монтажа нижних чувствительных блоков в передвижном узле дополнительно механически регулируется.
[0073] Раскрытые и другие варианты осуществления и функциональные операции, описанные в этом документе, могут быть реализованы в цифровой электронной схеме или в компьютерном программном обеспечении, программно-аппаратном обеспечении или аппаратном обеспечении, включая конструкции, раскрытые в этом документе, и их структурные эквиваленты, или в комбинациях одного или более из них. Раскрытые и другие варианты осуществления могут быть реализованы как один или более компьютерных программных продуктов, т.е. один или более модулей инструкций компьютерной программы, закодированных на читаемом компьютером носителе, для исполнения устройством обработки данных или для управления работой устройства обработки данных. Читаемый компьютером носитель может представлять собой машиночитаемое запоминающее устройство, машиночитаемое хранилище, устройство памяти, композицию вещества, вызывающие машиночитаемый распространяемый сигнал, или комбинацию одного или более из них. Термин «устройство обработки данных» охватывает все аппараты, приборы, устройства и машины для обработки данных, включая в качестве примера программируемый процессор, компьютер или множественные процессоры или компьютеры. Устройство может включать в себя, помимо аппаратного обеспечения, код, который создает среду выполнения для данной компьютерной программы, например, код, который входит в состав программно-аппаратного обеспечения процессора, пакета протоколов, системы управления базой данных, операционной системы или комбинации одного или более из них. Распространяемый сигнал является искусственно генерируемым сигналом, например, генерируемым машиной электрическим, оптическим или электромагнитным сигналом, который создается для кодирования информации при передаче на подходящее устройство-получатель.
[0074] Компьютерная программа (также известная как программа, программное обеспечение, прикладная программа, скрипт или код) может быть написана на любом языке программирования, в том числе компилируемом или интерпретируемом языке, и может быть установлена в любой форме, например, как самостоятельная программа или как модуль, компонент, подпрограмма или другой блок, пригодный для использования в вычислительной среде. Компьютерная программа не обязательно должна соответствовать файлу в файловой системе. Программа может храниться в части файла, где хранятся другие программы или данные (например, один или более скриптов, хранящихся в документе, написанном на языке разметки), в едином файле, предназначенном для данной программы, или во множественных согласованных файлах (например, файлах, где хранятся один или более модулей, подпрограмм или участков кода). Компьютерная программа может устанавливаться для исполнения на одном компьютере или на множественных компьютерах, находящихся в одном месте или распределенных по множественным местам и соединенных между собой сетью связи.
[0075] Процессы и логические потоки, описанные в этом документе, могут осуществляться одним или более программируемыми процессорами, исполняющими одну или более компьютерных программ для осуществления функций путем оперирования входными данными и генерирования выходных. Процессы и логические потоки также могут осуществляться посредством, а устройство также может быть реализовано в виде логической схемы специального назначения, например, FPGA (программируемой пользователем вентильной матрицы) или ASIC (специализированной интегральной схемы).
[0076] Процессоры, пригодные для исполнения компьютерной программы, включают в себя в качестве примера микропроцессоры как общего, так и специального назначения и любой один или более процессоров любого рода цифрового компьютера. В общем случае, процессор будет принимать инструкции и данные из постоянной памяти или оперативной памяти или их обеих. Существенными элементами компьютера являются процессор для выполнения инструкций и одно или более запоминающих устройств для хранения инструкций и данных. В общем случае, компьютер также будет включать в себя, или оперативно подключаться для приема данных от или переноса данных на, или обоих действий, одно или более запоминающих устройств большой емкости для хранения данных, например, магнитные, магнито-оптические диски или оптические диски. Однако компьютер нее обязан иметь такие устройства. Читаемые компьютером носители, пригодные для хранения инструкций компьютерной программы и данных, включают в себя все формы энергонезависимой памяти, сред и запоминающих устройств, включая в качестве примера полупроводниковые запоминающие устройства, например, EPROM, EEPROM и устройства флеш-памяти; магнитные диски, например, внутренние жесткие диски или сменные диски; магнито-оптические диски; и диски CD-ROM и DVD-ROM. Процессор и память могут дополняться логической схемой специального назначения или встраиваться в нее.
[0077] Хотя этот патентный документ содержит многочисленные конкретные признаки, их следует истолковывать не как ограничения объема какого-то изобретения или того, что может быть заявлено в формуле изобретения, а, напротив, как описания признаков, которые могут быть характерны для конкретных вариантов осуществления конкретных изобретений. Некоторые признаки, описанные в этом патентном документе в отношении отдельных вариантов осуществления, можно также реализовать в сочетании в едином варианте осуществления. Напротив, различные признаки, описанные в отношении единого варианта осуществления, можно также реализовать во множественных вариантах осуществления по отдельности или в любой подходящей подкомбинации. Кроме того, хотя признаки могут быть описаны выше как действующие в некоторых комбинациях и даже первоначально заявлены таким образом, один или более признаков из заявленной комбинации можно в ряде случаев исключать из комбинации, и заявленная комбинация может быть направлена на подкомбинацию или разновидность подкомбинации.
[0078] Аналогично, хотя операции изображены в чертежах в конкретном порядке, не следует думать, что такие операции должны осуществляться в конкретном показанном порядке или в последовательном порядке, или что должны осуществляться все проиллюстрированные операции, для достижения желаемых результатов. Кроме того, не следует думать, что разделение различных компонентов системы в вариантах осуществления, описанных в этом патентном документе, необходимо во всех вариантах осуществления.
[0079] Описано лишь несколько вариантов реализации и примеров, и на основании того, что описано и проиллюстрировано в этом патентном документе, можно предложить другие варианты реализации, усовершенствования и изменения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОСТРОЕНИЕ ИЗОБРАЖЕНИЯ ПО ЗАРЯЖЕННЫМ ЧАСТИЦАМ, СОЗДАВАЕМЫМ КОСМИЧЕСКИМИ ЛУЧАМИ | 2009 |
|
RU2503953C2 |
| МЮОННЫЙ ГОДОСКОП И УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ ОБЪЕКТОВ | 2020 |
|
RU2761333C1 |
| ОБНАРУЖЕНИЕ ЧАСТИЦ И ВАРИАНТЫ ПРИМЕНЕНИЯ ДЛЯ БЕЗОПАСНОСТИ И ПОРТАЛЬНОГО КОНТРОЛЯ | 2007 |
|
RU2468391C2 |
| Способ азимутального сканирования атмосферы с использованием потока мюонов космических лучей | 2023 |
|
RU2819137C1 |
| СТАТИСТИЧЕСКАЯ ТОМОГРАФИЧЕСКАЯ РЕКОНСТРУКЦИЯ НА ОСНОВЕ ИЗМЕРЕНИЙ ЗАРЯЖЕННЫХ ЧАСТИЦ | 2007 |
|
RU2468390C2 |
| КООРДИНАТНЫЙ ГАЗОНАПОЛНЕННЫЙ ДЕТЕКТОР | 2011 |
|
RU2485547C1 |
| СПОСОБ ДИАГНОСТИКИ АВАРИЙНОГО ЯДЕРНОГО РЕАКТОРА | 2012 |
|
RU2503075C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВОДНОЙ ЦЕЛИ В ОХРАНЯЕМОЙ АКВАТОРИИ | 1999 |
|
RU2157551C1 |
| ДЕТЕКТОР ДЛЯ ОБНАРУЖЕНИЯ ЗАРЯЖЕННЫХ ЧАСТИЦ | 2005 |
|
RU2287172C2 |
| СПОСОБ ТОМОГРАФИЧЕСКОГО КОНТРОЛЯ КРУПНОГАБАРИТНЫХ ГРУЗОВ | 1993 |
|
RU2072513C1 |

Изобретение относится к области инспектирования и визуализации материала с помощью детекторов заряженных частиц. Технический результат - упрощение процесса исследования материала, помещенного в представляющий интерес объем. Устройство для инспектирования и визуализации содержимого представляющего интерес объема включает в себя первый трековый блок детекторов частиц для приема входящих заряженных частиц, которые проходят через объект, и для измерения положения и направления заряженных частиц, которые проходят через объект, при этом позволяющий заряженным частицам проходить через себя, и второй трековый блок детекторов частиц, устанавливаемый относительно первого трекового блока детекторов частиц и представляющего интерес объема, содержащего объект инспектирования, так, что он позиционирован принимать выходящие заряженные частицы, которые проходят через первый трековый блок детекторов частиц и проходят через объект инспектирования, и измерять положение и направление выходящих заряженных частиц. Устройство также включает в себя процессор, который обрабатывает информацию от первого и второго трековых блоков детекторов частиц для выдачи оценки пространственной карты атомного числа и плотности объекта. 2 н. и 19 з.п. ф-лы, 6 ил.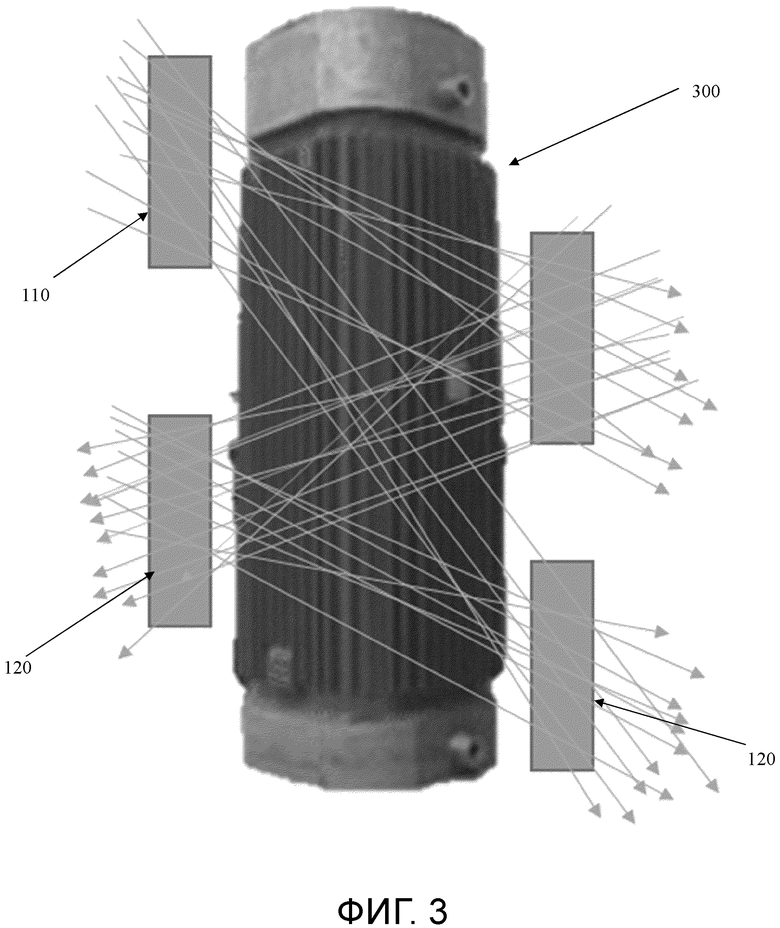
1. Устройство для инспектирования представляющего интерес объема, содержащее:
первый передвижной узел, содержащий:
первый верхний трековый блок детекторов частиц и первый нижний трековый блок детекторов частиц, оба из которых расположены для приема входящих заряженных частиц, которые далее проходят через объект инспектирования, содержащийся в представляющем интерес объеме; и
первую механическую опорную конструкцию для удержания как первого верхнего трекового блока детекторов частиц, так и первого нижнего трекового блока детекторов частиц в положении, при котором первый верхний трековый блок детекторов частиц расположен выше, чем первый нижний трековый блок детекторов частиц;
второй передвижной узел, содержащий:
второй верхний трековый блок детекторов частиц, располагаемый ниже относительно первого верхнего трекового блока детекторов частиц, и второй нижний трековый блок детекторов частиц, располагаемый ниже относительно первого нижнего трекового блока детекторов частиц, причем вторые верхний и нижний трековые блоки детекторов частиц расположены со стороны от представляющего интерес объема, противоположной первым верхнему и нижнему трековым блокам детекторов частиц, и выполнены с возможностью принимать заряженные частицы, которые проходят через первые верхний и нижний трековые блоки детекторов частиц и проходят через объект, и измерять положение и направление каждой заряженной частицы;
вторую механическую опорную конструкцию для удержания как второго верхнего трекового блока детекторов частиц, так и второго нижнего трекового блока детекторов частиц второго передвижного узла в положении, при котором вторые верхний и нижний трековые блоки детекторов частиц второго передвижного узла имеют возможность принимать заряженные частицы, причем вертикальное положение второго верхнего трекового блока детекторов частиц второго передвижного узла ниже, чем первого верхнего трекового блока детекторов частиц первого передвижного узла, и другое вертикальное положение второго нижнего трекового блока детекторов частиц второго передвижного узла ниже, чем первого нижнего трекового блока детекторов частиц первого передвижного узла; и
процессор, подключенный как к первым верхнему и нижнему трековым блокам детекторов частиц, так и ко вторым верхнему и нижнему трековым блокам детекторов частиц, для обработки информации от первых верхнего и нижнего и вторых верхнего и нижнего трековых блоков детекторов частиц для выдачи оценки пространственной карты атомного числа и плотности объекта, причем первые верхний и нижний и вторые верхний и нижний трековые блоки детекторов частиц обеспечивают возможность по меньшей мере трех измерений положения заряженной частицы в первом направлении и по меньшей мере трех измерений положения заряженной частицы во втором направлении, отличном от первого направления,
при этом первая и вторая механические опорные конструкции придают геометрическую жесткость упомянутым первому и второму передвижным узлам в ходе инспектирования.
2. Устройство по п. 1, дополнительно включающее в себя по меньшей мере один жесткий металлический пруток, соединяющий между собой упомянутые первый и второй передвижные узлы для обеспечения геометрической жесткости между первым и вторым передвижными узлами в ходе инспектирования.
3. Устройство по п. 1, причем упомянутые первый и второй передвижные узлы являются двумя из по меньшей мере двух передвижных узлов, которые располагаются с правильным геометрическим рисунком вокруг объекта инспектирования.
4. Устройство по п. 1, дополнительно включающее в себя по меньшей мере один переносной навес для защиты от непогоды упомянутых первого и второго передвижных узлов.
5. Устройство по п. 1, причем первый передвижной узел выполнен так, что высота монтажа по меньшей мере одного из первого верхнего трекового блока детекторов частиц или первого нижнего трекового блока детекторов частиц в первом передвижном узле является механически регулируемой.
6. Устройство по п. 1, причем второй передвижной узел выполнен так, что высота монтажа по меньшей мере одного из второго верхнего трекового блока детекторов частиц или второго нижнего трекового блока детекторов частиц во втором передвижном узле является механически регулируемой.
7. Устройство по п. 1, причем размер промежутка между верхним и нижним трековыми блоками детекторов частиц в одном и том же передвижном узле является механически регулируемым.
8. Устройство по п. 1, причем по меньшей мере один из первого верхнего трекового блока детекторов частиц первого передвижного узла, первого нижнего трекового блока детекторов частиц первого передвижного узла, второго верхнего трекового блока детекторов частиц второго передвижного узла или второго нижнего трекового блока детекторов частиц второго передвижного узла содержит дрейфовые трубки для детектирования заряженных частиц.
9. Устройство по п. 1, дополнительно включающее в себя триггер совпадения в качестве фильтра для отделения сигналов от заряженных частиц от индуцированных гамма-излучением сигналов.
10. Способ работы устройства инспектирования, включающий:
размещение первого передвижного узла и второго передвижного узла, причем каждый из первого и второго передвижных узлов содержит два трековых блока детекторов частиц, вокруг объекта инспектирования для формирования системы трековых блоков детекторов частиц, причем второй верхний трековый блок детекторов частиц второго передвижного узла расположен ниже относительно первого верхнего трекового блока детекторов частиц первого передвижного узла, и второй нижний трековый блок детекторов частиц второго передвижного узла расположен ниже относительно первого нижнего трекового блока детекторов частиц первого передвижного узла, причем первая и вторая передвижные опорные конструкции удерживают первый и второй передвижные узлы соответственно с обеспечением возможности регулировки положения по меньшей мере одного из трековых блоков детекторов частиц первого и второго передвижных узлов;
прием на первом верхнем или нижнем трековом блоке детекторов частиц первого передвижного узла входящих заряженных частиц, которые далее проходят через объект инспектирования и через второй верхний или нижний трековый блок детекторов частиц второго передвижного узла и в представляющий интерес объем, содержащий объект инспектирования;
измерение положения и направления каждой из заряженных частиц, которые проходят через объект и первый и второй передвижные узлы;
сбор положения и направления множества заряженных частиц;
обработку положения и направления множества заряженных частиц в виде числовых данных на основании электрических сигналов, генерируемых в первом и втором передвижных узлах;
определение точек взаимодействия каждой заряженной частицы с любым из первого и второго верхнего или нижнего трековых блоков детекторов частиц;
аппроксимацию траектории входа каждой заряженной частицы прямой линией на основании определенных точек взаимодействия каждой заряженной частицы с первым верхним или нижним трековым блоком детекторов частиц;
аппроксимацию траектории выхода каждой заряженной частицы прямой линией на основании определенных точек взаимодействия каждой заряженной частицы со вторым верхним или нижним трековым блоком детекторов частиц; и
реконструкцию пространственной карты свойств материала на основании плотностей и радиационных длин объекта в представляющем интерес объеме и на основании совокупности траекторий входа и выхода частиц.
11. Способ по п. 10, причем число передвижных узлов в системе, включающей первый и второй передвижные узлы, выбирают на основании размера объекта инспектирования.
12. Способ по п. 10, причем высоты монтажа первых верхнего и нижнего и вторых верхнего и нижнего трековых блоков детекторов частиц выбирают на основании модели входящего мюонного потока космических лучей и положения представляющего интерес объема относительно первых верхнего и нижнего и вторых верхнего и нижнего трековых блоков детекторов частиц.
13. Способ по п. 10, дополнительно включающий в себя выполнение геометрической калибровки на основании совокупности траекторий входа и выхода частиц.
14. Способ по п. 10, причем по меньшей мере один из первых верхнего и нижнего и вторых верхнего и нижнего трековых блоков детекторов частиц содержит множество дрейфовых трубок, и способ дополнительно включает выполнение итерационной калибровки функции отклика время-радиус для каждой дрейфовой трубки из упомянутого множества дрейфовых трубок.
15. Способ по п. 10, дополнительно включающий в себя отфильтровывание сигналов, не принадлежащих измеренным заряженным частицам.
16. Способ по п. 15, причем заряженные частицы дополнительно идентифицируют в каждом передвижном узле на основании двух показателей измеренных заряженных частиц.
17. Способ по п. 16, причем первый показатель из упомянутых двух показателей основан на временном совпадении измеренных заряженных частиц в окне совпадения.
18. Способ по п. 17, причем размер окна совпадения устанавливают независимо для каждого передвижного узла.
19. Способ по п. 18, причем размер окна совпадения одного из первого или второго передвижного узла оптимизируют на основании временной характеристики верхнего и нижнего трековых блоков детекторов частиц передвижного узла и внешнего поля излучения в положении верхнего и нижнего трековых блоков детекторов частиц передвижного узла.
20. Способ по п. 16, причем второй показатель из упомянутых двух показателей основан на положениях первых верхнего и нижнего и вторых верхнего и нижнего трековых блоков детекторов частиц.
21. Способ по п. 20, причем второй показатель дополнительно оптимизируют на основании положения выбранной дрейфовой трубки в одном из первого или второго передвижного узла и положения этого передвижного узла относительно объекта инспектирования.
| WO 2016145105 A1, 15.09.2016 | |||
| US 2009074138 A1, 19.03.2009 | |||
| US 2015279489 A1, 01.10.2015 | |||
| US 2001021241 A1,13.09.2001 | |||
| СТАТИСТИЧЕСКАЯ ТОМОГРАФИЧЕСКАЯ РЕКОНСТРУКЦИЯ НА ОСНОВЕ ИЗМЕРЕНИЙ ЗАРЯЖЕННЫХ ЧАСТИЦ | 2007 |
|
RU2468390C2 |
| DURHAM J | |||
| Verification of Spent Nuclear Fuel in Sealed Dry Storage Casks via Measurements of Cosmic-Ray Muon Scattering, Phys | |||
| Rev | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| GREEN J | |||
| Optimizing | |||
