Изобретение относится к средствам навигации и может быть использовано в транспортных средствах с электротягой для определения местоположения транспортного средства.
Известны спутниковые навигационные системы: глобальная навигационная спутниковая система ГЛОНАСС и система глобального определения местоположения GPS [Спутниковые радионавигационные системы ГЛОНАСС/GPS на железнодорожном транспорте. Часть I: Учебное пособие для студентов специальности «Строительство железных дорог. Путь и путевое хозяйство». - М.:МИИТ, 2004. - 55 с.], обеспечивающие определение местоположения объекта. Недостатком этих систем является большая сложность и ошибки определения координат, связанные с неидеальным прохождением сигнала (из-за интерференции, вызванной рельефом местности, из-за задержек распространения сигнала, связанных с прохождением атмосферы, и др.).
Наиболее близким по техническому исполнению к предложенному устройству является навигационная система железнодорожных транспортных средств, содержащая вычислительное устройство, пассивные маркеры, средство активации и регистрации откликов маркеров. [Патент «Навигационная система железнодорожных транспортных средств» №2280579, РФ, Белотелов Д.В. и др.].
Недостатками данной навигационной системы железнодорожных транспортных средств являются невозможность определения местоположения транспортных средств между маркерами и сложность установки и эксплуатации последних.
Заявленное изобретение направлено на решение задачи определения местоположения транспортного средства.
Поставленная задача возникает при разработке систем контроля и управления транспортными средствами.
Заявленное устройство строится на основе использования линий электропередачи (ЛЭП) для передачи информации, осуществляемой путем наложения информационного сигнала на сигнал стандартного переменного тока частотой 50 Гц или 60 Гц (PLC) [А.В.Никифоров. Технология PLC - телекоммуникации по сетям электропитания //«Сети и системы связи». - 2002. - №5; «Устройство для передачи информации по фазным проводам линий электропередач» / Патент №2260910, РФ, Федоренко В.В. и др.; «Устройство кодирования, приема и передачи цифровой информации по электрическим сетям» / Патент №2315425, РФ, Мирошниченко А.Ю. и др.].
Сущность изобретения состоит в том, что в навигационную систему электротранспорта введены блок контроля и синхронизации, каналы передачи данных, формирователи навигационных сообщений, стационарные PLC-приемопередатчики, секции линий электропередачи, мобильные PLC-приемопередатчики, вычислительные блоки, блоки хранения данных, блок контроля и синхронизации соединен через каналы передачи данных с формирователями навигационных сообщений, которые через последовательно соединенные стационарные PLC-приемопередатчики, подключенные к обоим концам соответствующих секций линий электропередачи, секции линий электропередачи и мобильные PLC-приемопередатчики подключены к вычислительным блокам, подключенным к блокам хранения данных, причем мобильные PLC-приемопередатчики, вычислительные блоки и блоки хранения данных размещены на транспортных средствах.
На фигуре представлена функциональная схема навигационной системы электротранспорта.
Система состоит из блока контроля и синхронизации 1, каналов передачи данных 2, формирователей навигационных сообщений 3i, i=1,K, стационарных PLC-приемопередатчиков 4i, i=1,K, секций линий электропередачи 5Р, p=1,N, мобильных PLC-приемопередатчиков 6j, j=1,M, вычислительных блоков 7j, j=1,M, блоков хранения данных, 8j, j=1,M.
Блок контроля и синхронизации 1 соединен через каналы передачи данных 2 с формирователями навигационных сообщений 3i, i=1,K.
Формирователи навигационных сообщений 3i, i=1,K, через последовательно соединенные стационарные PLC-приемопередатчики 4i, i=1,K, секции линий электропередачи 5Р, p=1,N, мобильные PLC-приемопередатчики 6j, j=1,M подключены к вычислительным блокам 7j, j=1,M (М - число транспортных средств).
Вычислительные блоки 7j, j=1,M подключены к блокам хранения данных 8j, j=1,M, содержащим цифровые модели участков дороги. Мобильные PLC-приемопередатчики 6j, j=1,M, вычислительные блоки 7j, j=1,M и блоки хранения данных 8j, j=1,M размещены на транспортных средствах.
Стационарный PLC-приемопередатчик 4i подключен к началу р-й секции линий электропередачи 5Р, p=l,N, а стационарный PLC-приемопередатчик 4i+1 - к концу секции линии электропередачи 5Р: таким образом, стационарные PLC-приемопередатчики 4i, 4i+1 подключены к р-й секции линии электропередачи 5Р с двух разных концов. При наличии разветвленной секции линии электропередачи (более двух концов) стационарный PLC-приемопередатчик 4S устанавливают на каждом конце секции линии электропередачи.
Устройство обеспечивает определение ординаты транспортного средства на участке дороги из одного пункта в другой. Под ординатой здесь понимается расстояние от известного пункта до транспортного средства.
При наличии нескольких путей из одного пункта в другой, например, прямого (главного) пути и более длинного (бокового) пути, устройство обеспечивает определение как ординаты транспортного средства, так и номера пути. Например, (фигура), на секции линии электропередачи 51 находятся два транспортных средства, на секции линии электропередачи 5Р транспортное средство находится на главном пути, на секции линии электропередачи 5N транспортное средство находится на боковом пути. Устройство работает следующим образом.
Блок контроля и синхронизации 1 по каналам передачи данных 2 передает сигналы контроля и синхронизации для синхронизации времени всех формирователей навигационных сообщений 3К, К - количество формирователей навигационных сообщений.
Формирователи навигационных сообщений 3К формируют сообщения, содержащие:
1) ординату стационарного PLC-приемопередатчика 4i;
2) время передачи сообщения,
и передают их в стационарные PLC-приемопередатчики 4i. От стационарных PLC-приемопередатчиков 4i навигационные сообщения через соответствующие секции линий электропередачи 5Р, p=1,N, и мобильные PLC-приемопередатчики 6j j=1,M поступают на вычислительные блоки 7j, j=1,M.
Вычислительный блок 7j, получив навигационное сообщение от стационарного PLC-приемопередатчика 4i, определяет расстояние до него (т.е. до начала секции линии электропередачи 5Р) по формуле:
LH=C·Δti,
где LH - расстояние между стационарным PLC-приемопередатчиком 4i и мобильным PLC-приемопередатчиком 6j (вычислительным блоком 7j); С-скорость распространения навигационного сообщения в линии электропередачи 5Р;
Δti - время передачи между передачей сообщения стационарным PLC-приемопередатчиком 4i и получением сообщения мобильным PLC-приемопередатчиком 6j, j=1,M.
Аналогично, получив сообщение от стационарного PLC-приемопередатчика 4i+1, вычислительный блок 7j, j=1,M определяет расстояние до конца секции линии электропередачи 5Р по формуле:
Lk=C·Δti+i,
LK - расстояние между стационарным PLC-приемопередатчиком 4i+1 и вычислительным блоком 7j;
Δti+1 - время передачи между передачей сообщения стационарным PLC-приемопередатчиком 4i+1 и получением сообщения мобильным PLC-приемопередатчиком 6j, j=1,M.
Затем вычислительное устройство 7j, используя цифровую модель р-го участка, содержащуюся в блоке хранения данных 8j, j=1,M, вычисляет свое местоположение (ординату и номер пути), включая разветвленные участки дороги, по алгоритмам:
если LH+LK=L1, то Lm=LH (или Lm=LK), N=NHпр;
если LH+LK=L2, то Lm=LH (или Lm=LK), N=NНбк;
где L1 - расстояние между началом и концом соответствующей р-й секции линии электропередачи по прямому пути;
L2 - расстояние между началом и концом соответствующей р-й секции линии электропередачи по боковому пути;
Lm - искомое расстояние между известным пунктом (началом или концом соответствующей р-й секции линии электропередачи) и вычислительным устройством;
N - номер пути, на котором находится транспортное средство;
NHпр - номер прямого пути;
NHбк - номер бокового пути.
При необходимости вычислительное устройство 7j, j=1,M, используя цифровые модели участков дороги, преобразует ординату и номер пути в декартовые или полярные координаты.
Полученная информация о местоположении объекта через последовательно соединенные мобильные PLC-приемопередатчики 6j, j=1,M, секции линий электропередачи 5Р, p=1,N, стационарные PLC-приемопередатчики 4i, формирователи навигационных сообщений 3i и каналы передачи данных 2 передается от вычислительного устройства 7j, j=1,M в блок контроля и синхронизации 1 для контроля местоположения всех транспортных средств.
Передача навигационного сообщения по линиям электропередачи позволяет повысить точность определения местоположения транспортного средства по сравнению с маркерной навигационной системой, а также упростить навигационную систему и используемые в ней алгоритмы.
Простота и точность навигационной системы электротранспорта делает ее весьма перспективной при разработке систем контроля и навигации транспортных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛНОВОДНО-ОПТИЧЕСКИЙ ДАТЧИК МОНИТОРИНГА ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2006 |
|
RU2346839C2 |
| СИСТЕМА ДИАГНОСТИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2012 |
|
RU2519322C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАВИГАЦИОННОГО ПРИЕМНИКА | 2014 |
|
RU2567368C1 |
| ИНЕРЦИОННЫЙ ГЕНЕРАТОР | 2013 |
|
RU2553968C1 |
| Гибридное устройство маршрутизации | 2019 |
|
RU2710503C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СВОБОДНОСТИ ОТ ПОДВИЖНОГО СОСТАВА УЧАСТКОВ ПУТИ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕГОНЕ | 2012 |
|
RU2511760C1 |
| ОПТИЧЕСКАЯ ПРОГРАММИРУЕМАЯ ЛОГИЧЕСКАЯ МАТРИЦА | 2014 |
|
RU2541933C1 |
| ОПТИЧЕСКИЙ НАНОАКСЕЛЕРОМЕТР | 2010 |
|
RU2435167C1 |
| ОПТИЧЕСКИЙ НАНОУСИЛИТЕЛЬ | 2010 |
|
RU2423733C1 |
| ОПТИЧЕСКОЕ КОДИРУЮЩЕЕ НАНОУСТРОЙСТВО | 2011 |
|
RU2485691C1 |
Изобретение относится к средствам навигации и может быть использовано в транспортных средствах с электротягой для определения местоположения транспортного средства. Система содержит блок контроля и синхронизации, каналы передачи данных, формирователи навигационных сообщений, стационарные PLC-приемопередатчики, секции линий электропередачи, мобильные PLC-приемопередатчики, вычислительные блоки, блоки хранения данных. Блок контроля и синхронизации соединен через каналы передачи данных с формирователями навигационных сообщений, которые через последовательно соединенные стационарные PLC-приемопередатчики, подключенные к обоим концам соответствующих секций линий электропередачи. Секции линий электропередачи и мобильные PLC-приемопередатчики подключены к вычислительным блокам, подключенным к блокам хранения данных. Мобильные PLC-приемопередатчики, вычислительные блоки и блоки хранения данных размещены на транспортных средствах. Достигается определение местоположения транспортного средства. 1 ил.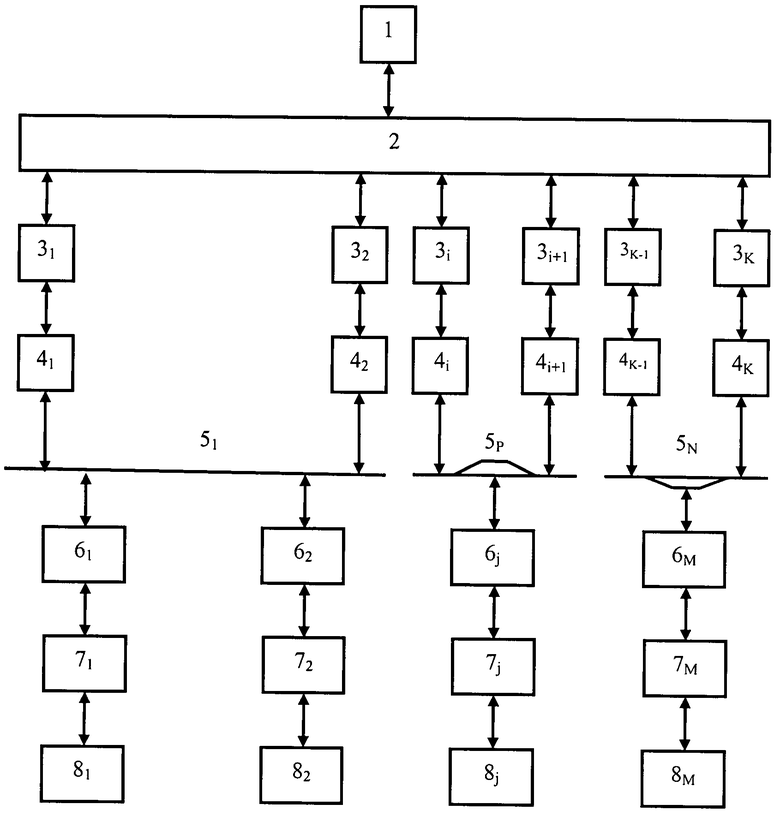
Навигационная система электротранспорта, отличающаяся тем, что в нее введены блок контроля и синхронизации, каналы передачи данных, формирователи навигационных сообщений, стационарные PLC-приемопередатчики, секции линий электропередачи, мобильные PLC-приемопередатчики, вычислительные блоки, блоки хранения данных, блок контроля и синхронизации соединен через каналы передачи данных с формирователями навигационных сообщений, которые через последовательно соединенные стационарные PLC-приемопередатчики, подключенные к обоим концам соответствующих секций линий электропередачи, секции линий электропередачи и мобильные PLC-приемопередатчики подключены к вычислительным блокам, подключенным к блокам хранения данных, причем мобильные PLC-приемопередатчики, вычислительные блоки и блоки хранения данных размещены на транспортных средствах.
| НАВИГАЦИОННАЯ СИСТЕМА ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2280579C1 |
| EP 1982503 B1, 22.07.2009 | |||
| US 2006253234 A1, 09.11.2006 | |||
| US 2007219681 A1, 20.09.2007. | |||

