Изобретение относится к области организации и управления движением на железных дорогах, а именно к системам навигации, обеспечивающим высокоточное позиционирование рельсовых транспортных средств как самоходных, так и несамоходных, и может быть использовано в качестве составной части системы информационного обеспечения управления движением, а именно точного определения местонахождения рельсовых транспортных средств, в том числе и дистанционное определение занимаемого рельсового пути.
Известна (RU, патент 0026505, 2001) система навигации железнодорожного транспортного средства, характеризуемая наличием, по меньшей мере, одного идентификатора (маркера) пути, размещенного на трассе прохождения указанного транспортного средства, расположенного на указанном транспортном средстве средства возбуждения отклика указанного идентификатора путей и средства регистрации отклика указанного идентификатора путей, бортового компьютера, причем указанный бортовой компьютер выполнен с возможностью анализа указанного отклика и передачи информации посредством бортового терминала наземному посту контроля местонахождения транспортного средства. В предпочтительном варианте реализации система содержит более одного идентификатора путей, каждый из которых настроен на генерирование излучения в заданном диапазоне частот. Обычно идентификаторы путей, расположенные по трассе следования железнодорожного транспортного средства, настроены на генерирование излучений, длины волн которых соответствуют заранее заданной зависимости, при этом предпочтительно идентификаторы путей, расположенные по трассе следования железнодорожного транспортного средства, настроены на генерирование излучений, длины волн которых монотонно возрастают или убывают. Преимущественно, идентификаторы путей размещены на заданном расстоянии друг от друга, причем расстояние между последовательно установленными идентификаторами путей введено в программу бортового компьютера. Обычно каждый идентификатор путей имеет свой идентификационный номер, введенный в программу бортового компьютера и передаваемый идентификатором на транспортное средство. Система может дополнительно содержать, по меньшей мере, один радиоканал и/или спутник-ретранслятор.
Недостатком известной системы следует признать ее локальный характер, поскольку при использовании ее в масштабах значительного региона информационный сигнал, генерируемый идентификатором, может не обеспечить точного места расположения данного идентификатора, что приведет к ошибке в определении места нахождения транспортного средства и тем более занимаемого рельсового пути.
Известна (RU, патент 2092355, 1997) система для управления движением поездов с использованием искусственных спутников Земли, содержащая установленные на каждом локомотиве приемники передаваемых с искусственных спутников Земли сигналов, выход каждого из которых связан с входом соответствующего из дальномеров, выходами подключенных к входам блока формирования сигналов местоположения поезда путем решения навигационных уравнений, связанного выходами с входом блока контроля и регулирования скорости движения поезда, входом блока памяти и через цифроаналоговый преобразователь с входом передатчика, выполненного с возможностью передачи сигналов через спутник связи на диспетчерский пункт, на котором установлен блок обработки информации, связанный с дисплеем, кроме того, система снабжена установленным на каждом локомотиве рельсовым локатором, а блок формирования сигналов местоположения поезда выполнен с дополнительным входом, подключенным к выходу рельсового локатора, и каналом формирования сигналов скорости поезда и расстояния до идущего впереди транспортного средства по информации, поступающей с рельсового локатора, для индикации их на локомотивном дисплее.
Недостатком известного устройства следует признать невозможность определения занятого транспортным средством рельсового пути, поскольку точность определения координат с использованием средств космической навигации не превышает 10 м, а расстояние между рельсовыми путями обычно составляет 4-6 м.
Техническая задача, решаемая посредством предлагаемого технического решения, состоит в обеспечении повышения точности определения местонахождения подвижных объектов рельсового транспорта.
Техническим результатом является создание навигационной системы, обеспечивающей повышение безопасности использования объектов рельсового транспорта за счет однозначного дистанционного определения занимаемого подвижными объектами рельсового пути и их положения на этом пути.
Для достижения указанного технического результата предложено использовать систему навигации рельсового транспорта, содержащую размещенное на борту подвижного объекта вычислительное устройство, выполненное с возможностью подключения к каналам передачи информации, к которому подключен, по меньшей мере, один спутниковый навигационный приемник с антенной, кроме того, система содержит средство активации и регистрации откликов маркеров с антеннами, подключенное к вычислительному устройству, и множество необслуживаемых пассивных маркеров, представляющих собой устройства, получающие питание от энергии электромагнитных колебаний, передаваемой с подвижного объекта посредством антенн средства активации, и выполненные с возможностью при получении указанной энергии излучать модулированные электромагнитные колебания, однозначно характеризующие место установки маркера, установленные безопасным образом на рельсовом пути с возможностью однозначного определения начала и конца каждого отдельного значащего участка рельсового пути, и базу данных маркеров, размещаемую на подвижном объекте или стационарно с возможностью доступа вычислительного устройства к указанной базе данных с использованием радиоканала. Это делает возможным определять дистанционно с диспетчерского пункта или локально на подвижном объекте занятый транспортным средством рельсовый путь и местонахождение на указанном рельсовом пути транспортного средства.
При реализации системы предпочтительно могут быть использованы или индукционные средства активации и регистрации и индукционные маркеры, или микроволновые средства активации и регистрации и микроволновые маркеры. Система также может дополнительно содержать инерционный датчик гироскопического типа. Обычно инерционный датчик дополнительно содержит встроенный счетчик количества оборотов колеса подвижного объекта.
Предлагаемая система навигации отличается от известных аналогичных систем тем, что кроме определения местоположения с высокой точностью за счет средств спутниковой навигации позволяет однозначно определять занимаемый рельсовый путь за счет идентификации рельсового пути маркером, одновременно выполняющим функцию калибровки спутникового приемника.
Указанный технический результат достигается только комплексным использованием аппаратуры, размещенной на борту подвижного объекта, включающей подключенное к каналам передачи данных вычислительное устройство и подключенный к нему спутниковый навигационный приемник с антенной, а также индукционных (в другом варианте - микроволновых) средств активации и регистрации отклика маркеров с антеннами, размещаемой на рельсовом пути группы необслуживаемых пассивных маркеров, представляющих собой устройства, получающие питание от энергии электромагнитных колебаний, передаваемой с подвижного объекта, и, будучи запитаны, излучающие электромагнитные колебания, модулированные цифровой информацией, содержащей номер маркера, и устанавливаемых безопасным образом на рельсовом пути так, чтобы однозначно определять начало и конец каждого отдельного значащего участка рельсового пути; а также базы данных маркеров, размещаемой или на подвижном объекте, или стационарно, подключенной к каналу передачи данных. Исключение хотя бы одного из вышеперечисленных элементов не позволяет получить указанный технический результат.
Используемый маркер представляет собой одно из известных устройств, содержащих приемник электромагнитной энергии, запоминающее устройство, формирователь цифровой последовательности, модулятор и передатчик. Для приема и излучения электромагнитных колебаний маркер содержит также одну или более катушку индуктивности или антенну. При попадании в приемник достаточного количества электромагнитной энергии схема начинает работать следующим образом. Формирователь воздействует считанной из запоминающего устройства цифровой последовательностью на модулятор, изменяющий известным способом одну или более из характеристик излучаемого передатчиком электромагнитного колебания. Для повышения достоверности принятой подвижным средством информации цифровая последовательность повторяется циклически до тех пор, пока электромагнитная энергия не перестанет поступать на вход приемника.
Маркер, координаты которого с высокой точностью привязки к местности хранятся в базе данных, позволяет определить погрешность спутниковой навигации и компенсировать ее, вплоть до следующего маркера. Это позволяет определить путь, на котором находится данное транспортное средство и увеличить точность определения положения на данном пути.
На чертеже изображена блок-схема навигационной системы рельсовых транспортных средств, при этом использованы следующие обозначения: спутниковый навигационный приемник 1 с антенной 2, вычислительное устройство 3, инерционный датчик 4, база данных маркеров 5, приемопередатчик 6 с антеннами 7 и маркеры 8.
Предлагаемая система навигации работает следующим образом. Спутниковый навигационный приемник 1 получает сигналы от навигационных спутников (например, GPS, ГЛОНАСС и т.д.) через антенну 2. На основе полученных радиосигналов, решая известным образом навигационное уравнение, приемник 1 рассчитывает положение подвижного объекта в пространстве с некоторой точностью (обычно, до 10-30 м), не позволяющей однозначно определить занимаемый рельсовый путь, и передает его в вычислительное устройство 3. При прохождении транспортного средства в зоне действия маркера 8 последний активируется от электромагнитной энергии, излучаемой средством активации и регистрации 6 через антенны 7, и начинает излучать электромагнитные колебания, модулированные цифровой информацией, характеризующей номер маркера. Средство активации и регистрации 6 через антенны 7 принимает электромагнитные колебания от маркера 8 и передает считанный номер маркера в вычислительное устройство 3. Вычислительное устройство 3 через каналы передачи данных передает номер маркера в базу данных 5. База данных 5 возвращает через каналы передачи данных в вычислительное устройство 3 информацию о координатах маркера, рельсовом пути, на котором он установлен, а также дополнительную информацию, например данные о скоростном режиме участка, профиле участка, расстоянии до объектов (в т.ч. следующем маркере) и т.д. Вычислительное устройство 3 на основе полученной информации рассчитывает поправку к данным спутникового навигационного приемника и в дальнейшем использует эту поправку до следующего маркера. В варианте использования микроволнового маркера 8 вычислительное устройство 3 дополнительно своей командой может отключать микроволновое электромагнитное излучение средства активации и регистрации 6 с целью уменьшения влияния вредного электромагнитного излучения на окружающую среду и повторно включает его на расстоянии до следующего маркера, минимум вдвое превышающем погрешность спутникового навигационного приемника 1. В случае кратковременного пропадания сигнала с навигационных спутников (в частности, в тоннелях, под эстакадами, в горах и т.д.) вычислительное устройство 3 использует инерционный датчик 4 для определения вектора движения подвижного объекта (в другом варианте - спутниковый навигационный приемник использует встроенный инерционный датчик). При дополнительном использовании встроенного счетчика оборотов колеса вычислительное устройство получает также данные о скорости движения и пройденном криволинейном расстоянии, которые использует для решения навигационного уравнения известным способом.
Полученные данные о занимаемом рельсовом пути и своем местоположении на нем вычислительное устройство 3 может передать по каналам передачи данных системам управления движения или устройству отображения информации обслуживающему персоналу, в том числе на самом подвижном объекте.
Использование предлагаемой системы позволяет однозначно определить местонахождения транспортного средства на рельсовом пути, а также занимаемый транспортным средством рельсовый путь.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ ТРАНСПОРТНОЙ И ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ ПО ОДНОПРОВОДНОЙ ЛИНИИ РАДИОПЕРЕДАЧИ | 2023 |
|
RU2814649C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
| ПЛАТФОРМА-АМФИБИЯ ДЛЯ ПЕРЕМЕЩЕНИЯ, ПОЗИЦИОНИРОВАНИЯ И НЕПОДВИЖНОГО БАЗИРОВАНИЯ РАБОЧИХ СРЕДСТВ И МЕХАНИЗМОВ В ХОДЕ ОСУЩЕСТВЛЕНИЯ РАБОТ | 2010 |
|
RU2468932C2 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| НАДВОДНЫЙ ПРИЕМНИК/ПЕРЕДАТЧИК С КОНВЕРТЕРОМ ДАННЫХ ДЛЯ ОБЕСПЕЧЕНИЯ ТОЧНОЙ НАВИГАЦИОННОЙ ПРИВЯЗКИ ДЛЯ ПОДВОДНЫХ ПОДВИЖНЫХ ТЕХНИЧЕСКИХ ОБЪЕКТОВ | 2011 |
|
RU2485445C1 |
| ДВУХСРЕДНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ И НАВИГАЦИОННЫЙ КОМПЛЕКС С СИСТЕМОЙ ОБЕСПЕЧЕНИЯ ТОЧНОЙ НАВИГАЦИОННОЙ ПРИВЯЗКИ ДЛЯ ПОДВОДНЫХ ПОДВИЖНЫХ ТЕХНИЧЕСКИХ ОБЪЕКТОВ | 2011 |
|
RU2485447C1 |
| КОМПЛЕКС СРЕДСТВ ВИДЕОНАБЛЮДЕНИЯ И СВЯЗИ МОБИЛЬНОГО ПУНКТА УПРАВЛЕНИЯ | 2011 |
|
RU2468522C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| ИЗМЕРИТЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТАНАВЛИВАЕМЫЙ НА ЛЕД | 2011 |
|
RU2486471C1 |
| СИСТЕМА КОНТРОЛЯ МЕСТОНАХОЖДЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2284938C1 |
Изобретение относится к области организации и управления движением на железных дорогах, а именно - к системам навигации. На борту подвижного объекта размещено вычислительное устройство, а также, по меньшей мере, один подключенный к нему спутниковый навигационный приемник. Пассивные маркеры установлены безопасным образом на рельсовом пути с возможностью однозначного определения начала и конца каждого отдельного значащего участка рельсового пути. Имеется средство активации и регистрации откликов маркеров, снабженное антеннами и подключенное к вычислительному устройству. База данных маркеров размещена на подвижном объекте или стационарно с возможностью доступа к ней вычислительного устройства через каналы передачи информации. Необслуживаемые пассивные маркеры представляют собой устройства, получающие питание от энергии электромагнитных колебаний, передаваемой с подвижного объекта посредством антенн средства активации, и выполненные с возможностью при получении указанной энергии излучать модулированные электромагнитные колебания, однозначно характеризующие место установки маркера. Предложенная система обеспечивает высокоточное позиционирование рельсовых транспортных средств как самоходных, так и несамоходных, и может быть использована в качестве составной части системы информационного обеспечения управления движением. 4 з.п. ф-лы, 1 ил.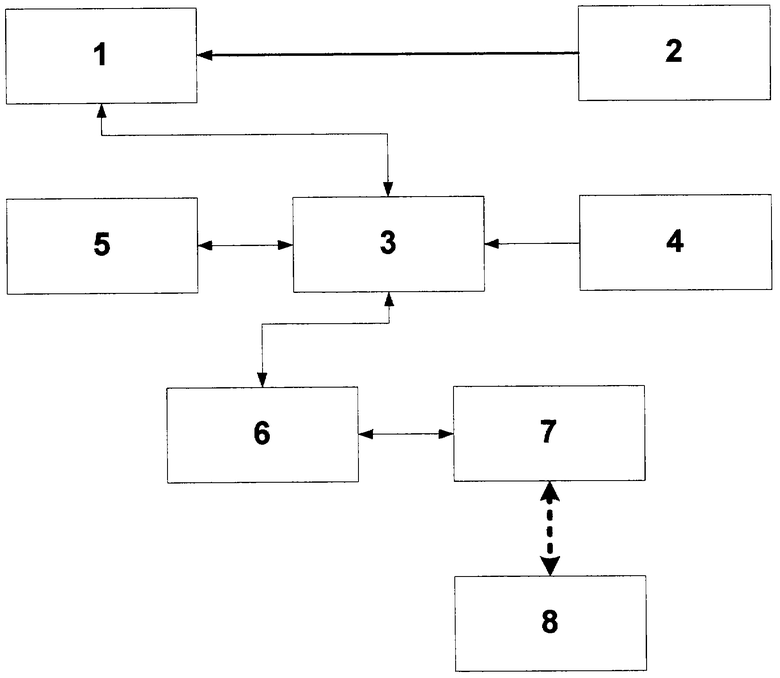
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ С ПОМОЩЬЮ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ | 1992 |
|
RU2092355C1 |
| Подшипник для поддержания полого конца вала | 1928 |
|
SU26505A1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 1996 |
|
RU2108252C1 |
| DE 19729990 A1, 14.01.1999. | |||

