Изобретение относится к способам навигации по Спутниковым Радионавигационным Системам (СРНС) и может быть использовано для определения координат навигационного приемника. Технический результат заключается в обеспечении возможности определения координат навигационного приемника СРНС с частичной компенсацией погрешностей.
Известны различные способы определения координат навигационного приемника. В [патенте США No 7535414] изложен способ, который предполагает, что перед вычислением координат навигационного приемника производится разрешение неопределенностей в неполных псевдодальностях. В [патенте США No 6417801] предлагается разрешение неопределенностей в неполных псевдодальностях путем добавления в вектор оцениваемых параметров поправки ко времени измерения, перебор всех допустимых целочисленных комбинаций неоднозначностей и выбор нужной из них по критерию минимальности остаточных невязок.
Также для повышения точности определения координат навигационного приемника используются различные алгоритмы компенсации погрешностей часов и погрешностей, обусловленных прохождением радиосигнала через атмосферу [Интерфейсный контрольный документ ГЛОНАСС (5.1 редакция). - М.: РНИИ КП, 2008. - 57 с.], а также применяется дифференциальный режим измерений по кодовым дальностям, реализуемый с помощью контрольного навигационного приемника с известными географическими координатами - т.н. базовой станции [Bar-Sever, Y. A new Massachusetts model for GPS yaw attitude // Journal of Geodesy, 70, 714723, 1996].
Наиболее близким к предлагаемому изобретению является способ, описанный в [патенте РФ №2432584. Способ определения координат навигационного приемника спутниковой радионавигационной системы / Васильев М.В., Михайлов Н.В., Поспелов С.С., Джалали Биджан].
Заявленное изобретение направлено на решение задачи повышения точности определения местоположения навигационного приемника.
Поставленная задача возникает при разработке систем контроля и управления транспортными средствами.
Для решения данной задачи используются сигналы измерений расстояния (дальности) между навигационным приемником и спутником ZR, которые в общем виде могут быть записаны как:

где ξс, ηс, ζc - известные координаты спутника в гринвичской СК (ГСК), ξ, η, ζ - текущие координаты навигационного приемника в ГСК, С - номинальное значение скорости света в вакууме, Δτ - погрешность часов навигационного приемника, ΔT - погрешность часов спутника, WИ, WT - погрешности, обусловленные прохождением радиосигнала через ионосферу и тропосферу, WR - погрешности, включающие аппаратурные погрешности навигационного приемника и передатчика спутника, погрешности многолучевости и случайные погрешности измерения.
При непосредственном использовании информационного сигнала (1) неизбежно возникает проблема подавления всех вышеперечисленных помех, мощность которых может существенно превосходить мощность полезного сигнала (истинной дальности), что, в свою очередь, может приводить к расходимости процесса оценивания координат.
Вышеперечисленные алгоритмы компенсации погрешностей, несмотря на усложнение навигационных вычислений, обеспечивают лишь частичное подавление соответствующих помех, а дифференциальный режим, в силу принципа его организации, или не позволяет избавиться от ошибок смещения часов спутников и базовой станции (при использовании первых кодовых разностей), или требует дополнительной информации от второго спутника (при использовании вторых кодовых разностей) [Savage, P.G. Velocity and Position Algorithms // AIAA Journal Of Guidance, Control, And Dynamics, Vol. 21, No. 2, March-April 1983, pp. 208-221]. Более того, для организации дифрежима на базовой станции необходимо иметь навигационный вычислитель, мощность которого зависит от состава наблюдаемого спутникового созвездия [Dare, P., Saleh, H. Network Design: Logistics Solution Using Optimal and Near-Optimal Methods // Journal of Geodesy, vol. 74, pp. 467-478, 2000].
Для устранения этих недостатков схема организации режима измерений формируется следующим образом. В навигационном приемнике дополнительно реализуется возможность приема сигналов т.н. трекерных измерений - измерений расстояния (дальности) навигационного приемника от базовой станции, передаваемых с базовой станции на навигационный приемник. Трекерный сигнал может передаваться как на частотах спутниковых сообщений и приниматься навигационным приемником (здесь базовая станция выступает в роли псевдоспутника), так и по обычным каналам сети GSM, что не приводит к дополнительным аппаратурным затратам при организации режима трекерных измерений [Интерактивная геоинформационная система «Сириус-навигатор» // Свидетельство о гос. регистрации программ для ЭВМ №2010614154 от 25.06.2010. - Животченко B.C. и др.].
На фиг. 1 показана схема передачи трекерных сигналов, где использованы обозначения: спутники li, i=1,N, базовая станция 2, навигационный приемник 3.
В заявленном способе определения координат навигационного приемника предлагается, во-первых, с базовой станции на объект передавать не поправки дальности, а просто трекерный сигнал дальности базовой станции до объекта ZRT:

где ξБ, ηБ, ζБ - известные координаты базовой станции, ΔτБ - погрешность часов базовой станции, WRT - погрешности, включающие аппаратурные погрешности передатчика базовой станции и навигационного приемника, погрешности многолучевости и случайные погрешности измерения.
Во-вторых, с базовой станции непосредственно транслировать на навигационный приемник принятый ею сигнал кодовых измерений дальности спутника до базовой станции ZRБ:

где WRБ - погрешности, включающие аппаратурные погрешности приемника базовой станции и передатчика спутника, погрешности многолучевости и случайные погрешности измерения.
В-третьих, в качестве сигнала измерения (используемого далее для определения координат объекта) рассматривать не кодовые измерения дальности спутника до объекта, а линейную комбинацию ZR* сигналов ZR, ZRБ, ZRT:
ZR*=ZR-ZRБ-ZRT.
В этом случае в соответствии с (1), (2), (3) сигнал ZR* имеет вид:
Комбинированный сигнал ZR* свободен от погрешностей, в наибольшей степени влияющих на точность спутниковой навигации: погрешностей часов объекта, базовой станции и спутника, а также погрешностей, обусловленных прохождением радиосигнала через ионосферу и тропосферу.
В свою очередь, линейная комбинация погрешностей WR-WRБ-WRT не зависит от характерных для традиционной схемы помех, также существенно влияющих на общую точность решения навигационной задачи: аппаратурных погрешностей передатчика спутника и погрешностей многолучевости при передаче навигационных сообщений от спутника. В целом это резко снижает уровень помех в сигнале ZR*, что при использовании его для определения вектора координат повышает точность оценки последнего.
При этом навигационный приемник использует сообщения, полученные от базовой станции, для всех спутников, находящихся в видимости навигационного приемника, а сформированные в соответствии с (4) линейные комбинации сигналов от первого, второго, третьего и более спутников используются для традиционного итеративного решения [Интерфейсный контрольный документ ГЛОНАСС (5.1 редакция). - М.: РНИИ КП, 2008. - 57 с.] соответствующей системы уравнений с тремя неизвестными ξ, η, ζ с целью высокоточного определения координат навигационного приемника.
Простота и точность данного способа определения координат навигационного приемника делают его весьма перспективным при разработке систем контроля и навигации транспортных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО МОНИТОРИНГА ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2018 |
|
RU2690521C1 |
| СПОСОБ ДИСТАНЦИОННОГО МОНИТОРИНГА ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2018 |
|
RU2683584C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НАВИГАЦИОННЫХ СПУТНИКОВ С КОМПЕНСАЦИЕЙ ПОГРЕШНОСТЕЙ НАВИГАЦИОННОГО ПРИЕМНИКА | 2015 |
|
RU2638411C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НАВИГАЦИОННЫХ СПУТНИКОВ | 2015 |
|
RU2587666C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НАВИГАЦИОННЫХ СПУТНИКОВ | 2015 |
|
RU2584541C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАВИГАЦИОННЫХ СПУТНИКОВ | 2015 |
|
RU2615634C2 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОУСТОЙЧИВОСТИ ИНТЕГРИРОВАННОЙ СИСТЕМЫ ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2498335C2 |
| НАВИГАЦИОННАЯ СИСТЕМА ЭЛЕКТРОТРАНСПОРТА | 2011 |
|
RU2468950C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2478979C1 |
Изобретение относится к средствам навигации и может быть использовано в транспортных средствах для определения местоположения транспортного средства. Достигаемый технический результат изобретения - обеспечение определения координат навигационного приемника с частичной компенсацией погрешностей. Указанный результат достигается за счет того, что спутниковые измерения дальности принимаются навигационным приемником и базовой станцией, причем сигналы измерения дальности, принятые базовой станцией, непосредственно транслируются в навигационный приемник, одновременно с базовой станции в навигационный приемник передается трекерный сигнал дальности базовой станции до навигационного приемника, а для определения координат навигационного приемника используется разность сигналов, полученных от спутника непосредственно и через базовую станцию. 1 ил.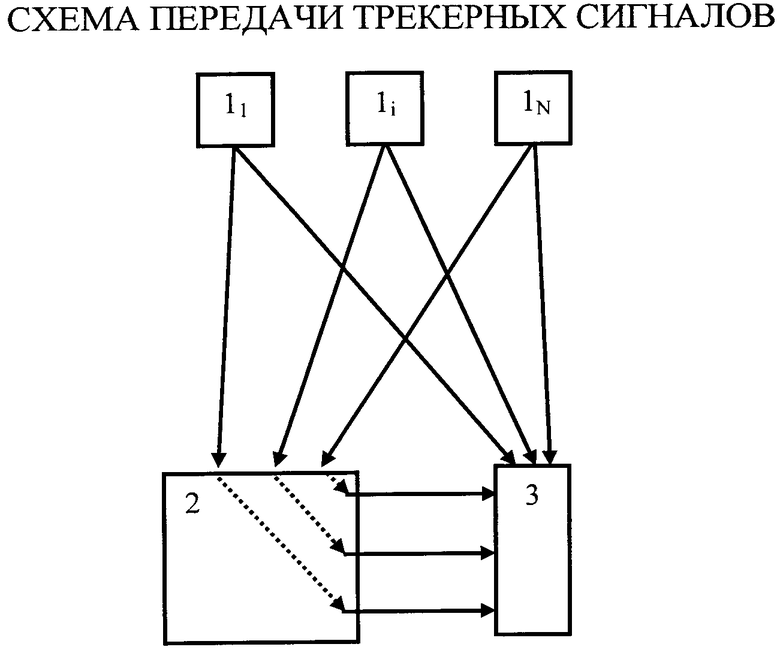
Способ определения координат навигационного приемника, заключающийся в том, что спутниковые измерения дальности принимаются навигационным приемником и базовой станцией, причем сигналы измерения дальности, принятые базовой станцией, непосредственно транслируются в навигационный приемник, одновременно с базовой станции в навигационный приемник передается трекерный сигнал дальности базовой станции до навигационного приемника, а для определения координат навигационного приемника используется разность сигналов, полученных от спутника непосредственно и через базовую станцию.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МОБИЛЬНОГО ПРИЕМНИКА СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ (СРНС) | 2010 |
|
RU2432584C2 |
| ГЛОБАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И РАДИОНАВИГАЦИИ, РАДИОМАЯК И ПРИЕМНИК, ИСПОЛЬЗУЕМЫЕ В ДАННОЙ СИСТЕМЕ | 1996 |
|
RU2182341C2 |
| CИСТЕМА СЛЕЖЕНИЯ ЗА ТРЕКЕРАМИ, СПОСОБ НАБЛЮДЕНИЯ И ОХРАНЫ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВ КОНТРОЛЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА | 2009 |
|
RU2516706C2 |
| СПОСОБ ИНДИКАЦИИ ПОЛОЖЕНИЯ ОБЪЕКТОВ НАБЛЮДЕНИЯ | 2006 |
|
RU2333538C2 |
| US 20060015250 A1, 19.01.2006 | |||
| JP 2008111684 A, 15.05.2008 | |||
| US 20070252754 A1, 01.11.2007 | |||

