Изобретение относится к устройству и способу предоставления информации о животных при их прохождении через проход для животных, причем в этой информации содержится, по меньшей мере, количество проходящих через проход животных.
Такой способ и устройство такого рода известны, например, из патентного документа DE 10351911 А1. Предложенный в этом документе способ для распознавания животных при их прохождении через проход для животных, представляющий собой зону доступа к автоматической доильной установке, прежде всего, содержит идентификацию подлежащих дойке животных посредством идентификационного устройства. Это устройство выполнено, например, в виде RFID-системы (системы радиочастотной идентификации), которая содержит приемо-передающее устройство на входных воротах или заграждении и транспондер или респондер (оба представляют собой RFID-метку), а при необходимости также датчики, носимые опознаваемыми животными.
При электронной идентификации животных посредством лишь таких идентификационных устройств в некоторых ситуациях могут возникнуть проблемы с распознаванием. Обычно животные заходят в доильную установку через зону входа. В таком случае в этой зоне находится идентификационное устройство, предназначенное для индивидуальной идентификации животных. Таким образом, в групповом доильном станке подлежащих дойке животных можно соотнести с доильными площадками. Так, например, первое животное, опознанное идентификационным устройством, автоматически соотносится с первой доильной площадкой, второе животное - со второй площадкой и т.д.
Однако, если какое-либо животное потеряло свою опознавательную метку или респондер, или они неисправны, или распознавание нарушено, то факт того, что животное физически уже заняло свою площадку, не определяется, при этом вычислительное устройство, которое управляет сопоставлением площадок на основе системы или программы управления стадом, с точки зрения обработки данных считает эту площадку пока еще не занятой.
Из-за этого для всех следующих животных данной группы возникает сдвиг между животным и доильной площадкой. Тем не менее, животных в этом случае доят, но количество молока и, опционально, прочие полученные данные (продолжительность дойки, проводимость и т.д.) отбрасывают, чтобы не хранить в памяти системы управления стадом неверные сведения о животных.
Поэтому для устранения этой проблемы в соответствующем патентном документе DE 10351911 А было предложено подсчитывать животных независимо от идентификации их передатчиков посредством распознающего устройства, которое распознает и подсчитывает животных на основании сенсорной системы, например фотоэлектрического детектора или камеры.
Таким образом, достигают того, что занятие доильной площадки стоящим на ней неидентифицированным животным все же учитывается, при этом в любом случае последующие, идентифицированные, животные автоматически сопоставляются с соответствующими доильными площадками.
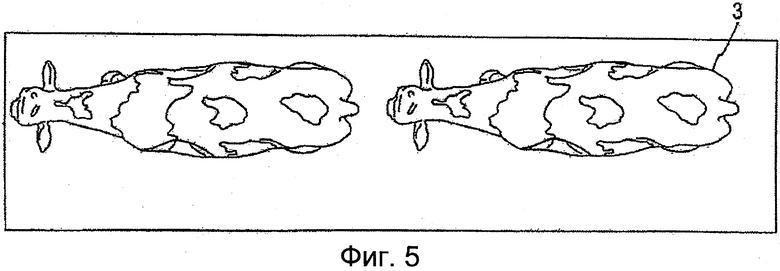
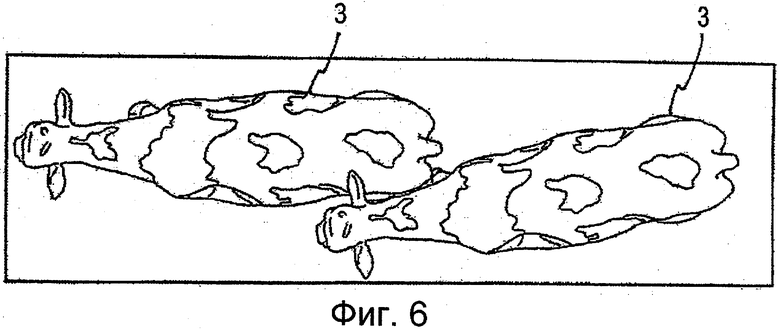
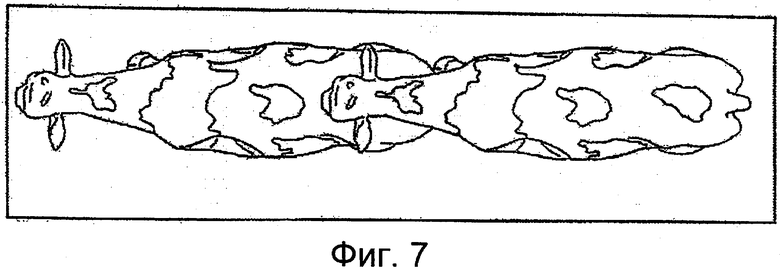
Итак, устройство рассматриваемого типа доказало свою пригодность на практике. Однако нам представляется, что это устройство можно оптимизировать в отношении конструктивного исполнения распознающего устройства. Так, оказалось, что точно подсчитать количество животных затруднительно, поскольку они, в отличие от обычных производственных процессов, заходят на доильную площадку с неравномерными интервалами или с непостоянной скоростью. Кроме того, может случиться, что животное остается в районе распознавания, двое животных заходят на доильную площадку непосредственно друг за другом (фиг.6) или друг за другом со сдвигом в боковом направлении (фиг.7), либо на площадку с высокой скоростью забегают отдельные животные или несколько животных (схематично показано на фиг.5). Все эти ситуации регистрируются с трудом.
К уровню техники, связанному с данной технологией, также относятся следующие документы.
Документ WO 03/032947 А1 относится к установке для контроля присутствия на животных идентификационной метки (респондера). В соответствии с этим документом животное, идентифицировать которое при отсутствии метки невозможно, тем не менее, может быть распознано надежным способом.
Для этого необходимо применение дополнительных устройств: устройства обнаружения, которое определяет, находится ли животное в зоне опроса при распознавании животных, и дополнительного распознающего устройства, которое маркирует животное, если на нем нет респондера и, соответственно, сигнал в зоне опроса определен не был. Это распознающее устройство может осуществлять маркировку, например, обрызгивая краской животное, потерявшее свой передатчик, что требует сравнительно больших затрат.
В документе ЕР 1537531 В1 раскрывается система и способ съемки для оценки физического состояния животных. При этом определяют показатель кондиции животных (числовое значение BCS - «body condition score»), причем этот способ содержит три этапа:
- регистрация определенного, представляющего интерес, участка на теле животного и генерирование отображающих его данных;
- обработка сгенерированных данных для получения трехмерного изображения интересующего участка;
- анализ трехмерного представления, рельеф поверхности которого отображает интересующий участок, чтобы определить заранее заданный измеряемый параметр и показать состояние организма.
Документ WO 03/059191 касается способа надежного прогнозирования для животных показателя кондиции животного (числового значения). Определенное числовое значение показателя кондиции животного (BCS) можно применить для определения соответствующих рационов питания домашних животных.
Документ WO 2004/049790 относится к устройству для обнаружения животного, включая корпус и голову, причем регистрируют параметры, относящиеся к поперечному размеру животного, находящегося в определенном положении в проходе.
Исходя из уровня техники, задача заявленного изобретения заключается в том, чтобы усовершенствовать устройство и способ вышеуказанного типа так, чтобы минимизировать число ошибочных сопоставлений при занятии доильной площадки и получить максимальное количество данных о животном.
В заявленном изобретении эта задача решается благодаря объектам изобретения пунктов 1 и 21.
Предпочтительные варианты реализации заявленного изобретения приведены в зависимых и независимых пунктах формулы изобретения.
Устройство для предоставления информации о животных при их прохождении через проход для животных, в котором содержится, по меньшей мере, число животных, проходящих через указанный проход, содержит по меньшей мере одно соединенное с вычислительным устройством (100) распознающее устройство (200) с сенсорным устройством (210) для сбора данных о животных, проходящих через проход, и устройство обработки данных (220, 300) для распознавания животных в полученных сенсорным устройством данных и выдачи счетных импульсов при распознавании в этих сигналах животных, при этом сенсорное устройство (210) выполнено с возможностью создания трехмерных изображений, а устройство обработки данных (220, 300) выполнено с возможностью распознавания животных в трехмерных данных указанных трехмерных изображений и подсчета животных на основании этого распознавания. Сенсорное устройство (210) содержит по меньшей мере одну трехмерную камеру (6). Сенсорное устройство (210) с осветительным устройством и двухмерной цифровой камерой может быть выполнено с возможностью определения трехмерных данных посредством измерения времени пролета. Сенсорное устройство (210) может быть выполнено с возможностью регистрации стереографического изображения. Сенсорное устройство (210) для регистрации стереографических снимков имеет две камеры (7, 8), расположенные в пространстве на некотором расстоянии друг от друга. Сенсорное устройство (210) может быть выполнено как устройство (10) для лазерной триангуляции. Заявленное устройство также может дополнительно содержать идентификационное устройство (400) для идентификации распознанных животных. Идентификационное устройство (400) может быть выполнено с возможностью идентификации животных посредством считывания данных с идентификационного средства на животном. Идентификационное устройство (400) может быть выполнено с возможностью идентификации животных посредством беспроводного считывания данных с идентификационного средства в виде RFID-чипа/метки на животном. При этом вычислительное устройство (100) может быть выполнено с возможностью непосредственной идентификации животных посредством сравнения снимков, выполненных распознающим устройством (200), с сохраненными в памяти данными за прошедшее время. Устройство (220, 300) обработки данных может быть выполнено с возможностью получения дополнительных, характерных для данного животного, данных из выполненных распознающим устройством трехмерных снимков. Устройство (220, 300) обработки данных выполнено с возможностью получения данных об упитанности из выполненных сенсорным устройством (210) трехмерных снимков. Вычислительное устройство (100) может быть выполнено с возможностью обработки и записи в память данных об упитанности или с возможностью автоматической оптимизации раздачи кормов на основании определенных и сохраненных в памяти данных об упитанности. При этом вычислительное устройство (100) выполнено с возможностью выдавать данные об упитанности в табличном и/или графическом виде, а также с возможностью автоматического сигнального оповещения при критических и/или отклоняющихся данных об упитанности. При этом упитанность определяют, обрабатывают и/или сохраняют в памяти по схеме оценки показателя кондиции животных.
Способ предоставления информации о животных при их прохождении через проход для животных с вышеописанным устройством содержит следующие шаги, а именно: посредством распознающего устройства (200) получают данные о проходящих через проход животных и оценивают их посредством устройства (220, 300) обработки данных, на основании этой оценки генерируют счетные импульсы, чтобы запустить счетчик животных в устройстве обработки данных или в вычислительном устройстве (100), при этом распознавание животных включает в себя, по меньшей мере, создание трехмерных данных из трехмерных снимков животных или частей тела животных, а обработка этих трехмерных данных включает в себя, по меньшей мере, генерирование счетных импульсов. Способ может дополнительно включать в себя идентификацию животных посредством идентификационного устройства (400), дополнительно содержать идентификацию животных согласно трехмерным данным, полученным распознающим устройством (200), дополнительно включать в себя определение дополнительного параметра животного согласно трехмерным данным, полученным распознающим устройством (200). При этом дополнительный параметр животного представляет собой параметр, характеризующий состояние здоровья животных. Его постоянно сохраняют в базе данных при каждом процессе дойки.
Также предлагается применение устройства по одному из вышеуказанных пунктов как части автоматической доильной установки и применение устройства по одному из вышеуказанных пунктов, как части системы управления движущимися устройствами автоматической доильной установки.
Доильная установка характеризуется наличием вышеописанного устройства, которое применяется как часть автоматической доильной установки или как часть системы управления движущимися устройствами автоматической доильной установки.
Данное устройство простым способом повышает коэффициент распознавания при распознавании на входе доильной установки. Кроме того, на крупных доильных установках благодаря данному устройству от распознавания на доильных площадках можно отказаться.
В соответствии с заявленным изобретением предложено устройство, посредством которого проходящих животных подсчитывают с высокой точностью. Кроме того, об учтенных животных получают дополнительные данные. Регистрирующее устройство выполняют таким образом, что количество ошибок счета и неправильно сопоставленных доильных площадок значительно снижается. Так как такие ошибки сопоставления при регистрации процессов дойки корректируют благодаря соответствующей программе обработки данных в сочетании с заявленным устройством, также можно повысить эффективность доильной площадки, оснащенной согласно заявленному изобретению. Таким образом, можно достичь точности сопоставления, необходимой для "точного животноводства".
Тогда как при обработке двухмерных данных из-за слишком низкой контрастности и постоянно меняющихся окружающих условий могут возникнуть ошибки (животные не распознаются как таковые и, таким образом, не учитываются), при обработке трехмерных снимков эта проблема не возникает, а если и возникает, то в значительно меньшем масштабе.
Заявленное регистрирующее устройство, по меньшей мере, делает возможным подсчет животных. Кроме того, его можно использовать также для решения дополнительных задач распознавания, например определения упитанности и/или обнаружения хромоты.
Так, например, полученные данные, предпочтительно, используют также для определения состояния здоровья животных. Создание трехмерных снимков для заключения о состоянии здоровья животных само по себе известно. Однако изобретение обеспечивает то преимущество, что при распознавании на входе доильной установки такие трехмерные снимки можно получать постоянно, так что простым способом обеспечивается возможность постоянного наблюдения за состоянием здоровья животных.
Распознающее устройство на входе доильной установки можно дополнить идентификационным устройством для индивидуальной или индивидуальной биометрической идентификации животных как таковых.
Съемочные аппараты для трехмерных снимков, являющиеся частью распознающего устройства, предпочтительно, размещают вблизи идентификационного устройства, если оно предусмотрено. Распознающие устройства пространственно могут располагаться перед идентификационным устройством или после него, предпочтительно, они расположены перед идентификационным устройством (если смотреть в направлении движения животных).
Если животное входит в зону перед идентификационным устройством или после него, распознающее устройство выполняет один или несколько трехмерных снимков.
Затем эти трехмерные снимки используют для того, чтобы определить, сколько животных находится в области съемки - одно или несколько. Сгенерированный счетный импульс соответствует количеству животных, которое было определено. После этого следует выдача информации о количестве животных, прошедших зону входа в направлении доильной установки.
Как вариант, съемку вполне можно осуществлять постоянно через короткие промежутки времени, чтобы проверять, находятся ли животные в районе распознающего устройства.
Таким образом, предлагаемое устройство также можно применить лишь в качестве "автономного" счетчика животных, например, для подсчета мясных животных без идентификационного устройства. В таком случае подсчитывают лишь количество счетных импульсов, чтобы определить количество животных.
Тем не менее, данное устройство, предпочтительно, дополняют идентификационным устройством, например, такого типа, который раскрыт в документе DE 10351911 А1, и данные счетчика связывают с параметрами, определенными идентификационным устройством, что обеспечивает особенно надежное управление стадом и, таким образом, создает условия, необходимые для "точного животноводства".
Кроме того, благодаря точности трехмерного измерения можно получить много другой информации.
Так, например, можно определить ширину животного в различных местах, его длину и/или скорость (прохождения). На основании этих данных можно найти и сохранить в запоминающем устройстве специфические для данного животного признаки (биометрические характеристики). Благодаря включению третьего измерения можно получить очень точные данные. Таким образом, при обработке данных никаких проблем из-за недостаточной контрастности или различных влияний окружающей среды не возникает.
Благодаря высокой точности посредством трехмерных снимков можно исследовать критерии упитанности животных. В частности, как особую форму этих критериев можно определить показатель кондиции животного BCS, т.е. оценку упитанности в баллах. Таким образом, при управлении стадом можно осуществить долгосрочный контроль состояния здоровья, упитанности и эффективности питания.
Благодаря определению зависящей от ситуации скорости передвижения животного можно определить признаки для контроля состояния здоровья, например хромоты.
Кроме того, при некоторых обстоятельствах точный анализ изображения позволяет определить травму. Для этого непосредственно обрабатывают и оценивают (автоматически или визуально) полученный трехмерный снимок. Травму можно установить по снимку непосредственно или, например, определив инвазию животного личинками мух.
Далее, по отражающим свойствам животного, например, можно определить, сильно оно потеет или нет. Например, если это касается очень многих животных, то можно включить автоматическое опрыскивание или обдувание или сделать общее заключение о неоптимальном микроклимате в животноводческом помещении.
Согласно заявленному изобретению полученные данные можно однозначно связать с конкретным животным. Для этого на протяжении нескольких дней, недель или месяцев собирают данные (например, все вышеуказанные), относящиеся к соответствующему животному, и сохраняют их, например, в системе управления стадом. Таким образом, создают обширную базу данных, при этом на основании данных за прошедшее время и текущих данных возможна автоматическая обработка данных.
Эту базу данных можно использовать, например, в следующем случае. Если животное было учтено или сфотографировано посредством заявленного устройства, но посредством классической техники распознавания оно распознано не было (например, из-за потери или неисправности RFID-метки), то, сравнивая текущие полученные данные с данными в базе данных, можно идентифицировать животное или в случае неоднозначной идентификации дать фермеру выборку возможных животных.
Кроме того, благодаря большому количеству данных и их высокой точности предлагаемое устройство можно применять в качестве автономной системы идентификации и непосредственно посредством распознающего устройства также осуществлять идентификацию животных.
Можно применять самые различные датчики, подходящие для создания трехмерных снимков. Особенно подходящим представляется применение трехмерной камеры (в частности, трехмерной камеры прямой съемки, основанной на измерении времени пролета (time-of-fight), стереографии или лазерной триангуляции с лазерной профилометрией.
Ниже изобретение более подробно описывается на основании примеров его реализации, описание сопровождается чертежами. На чертежах показано следующее.
Фиг.1. Вид в аксонометрии на проход для животных, содержащий трехмерную камеру и идентификационное устройство, а также животное, следующее через проход для животных.
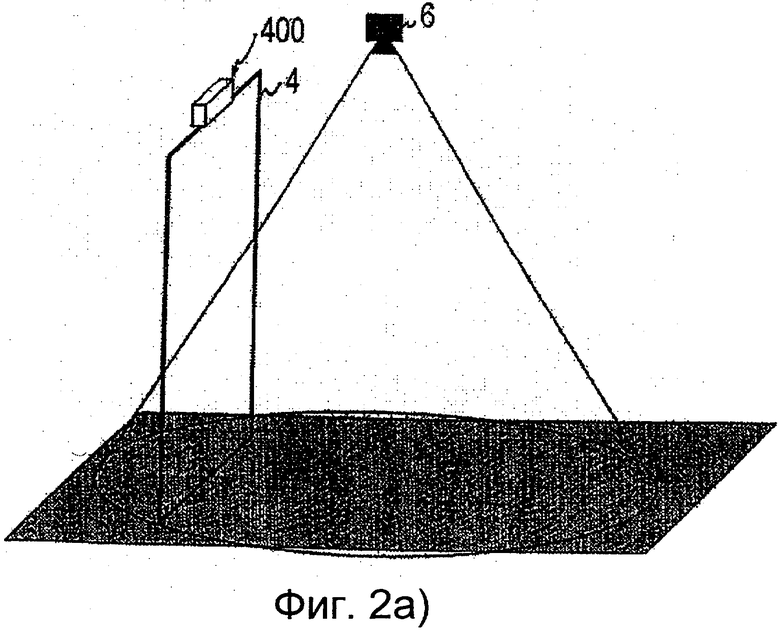
Фиг.2а. Второй проход для животных.
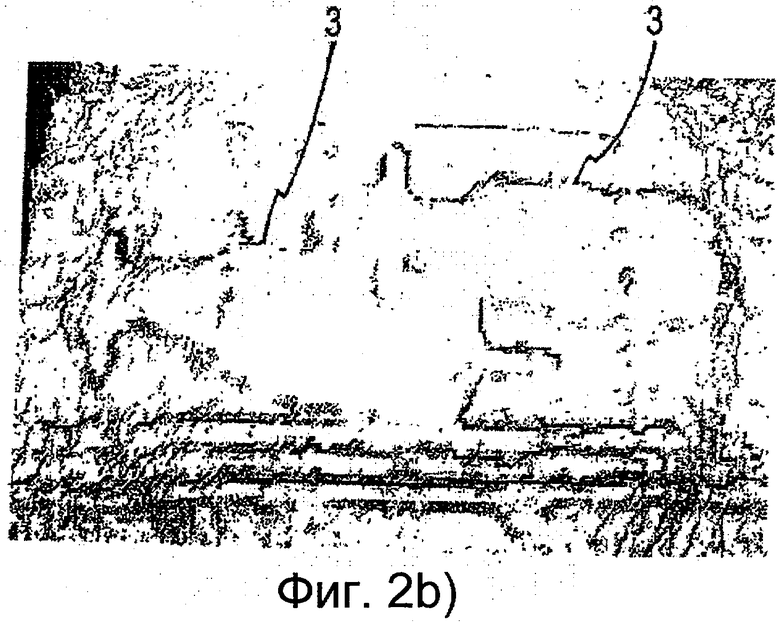
Фиг.2b. Снимок животных при их прохождении через проход для животных в соответствии с фиг.2а.
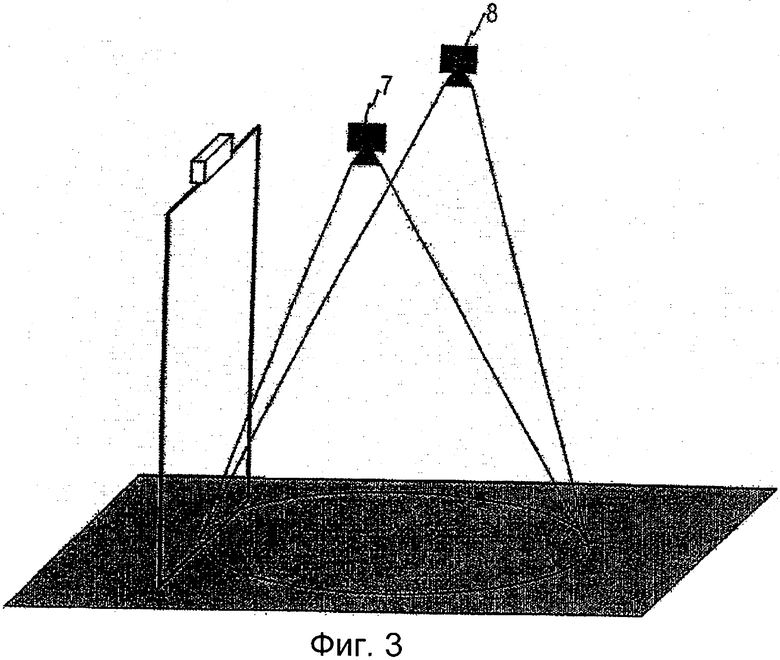
Фиг.3. Третий проход для животных.
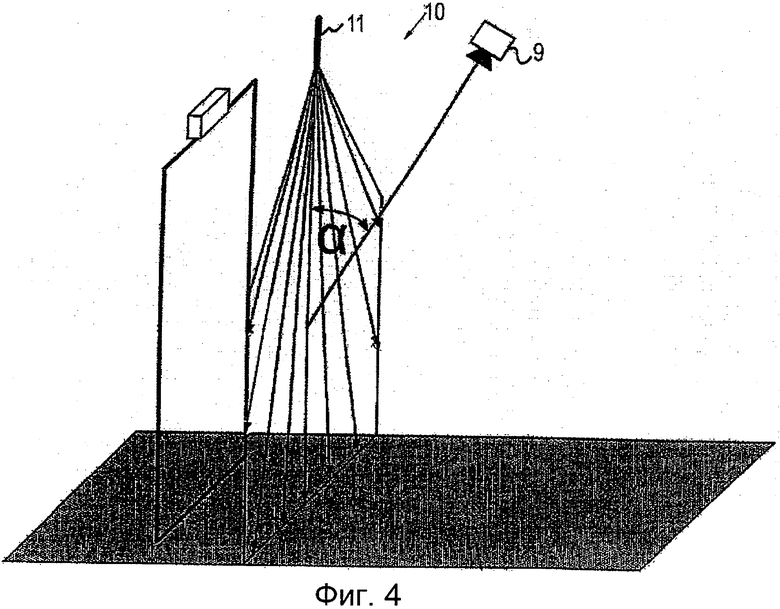
Фиг.4. Четвертый проход для животных.
Фиг.5-7. Вид сверху на животных для наглядного представления ситуаций, распознаваемых распознающим устройством согласно изобретению.
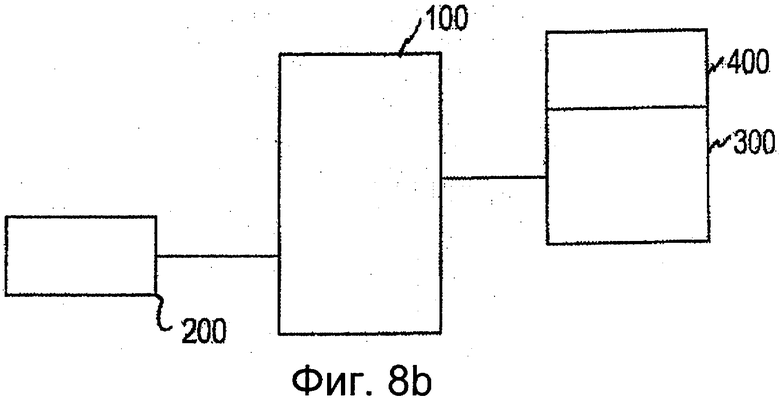
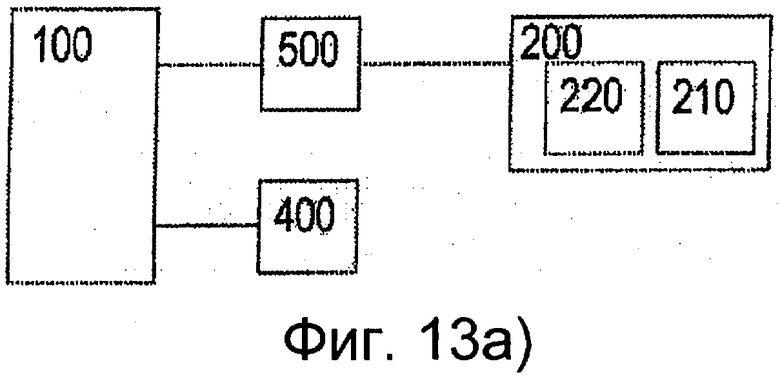
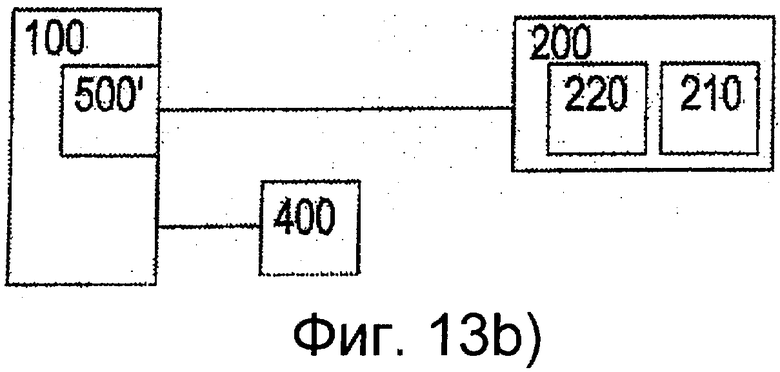
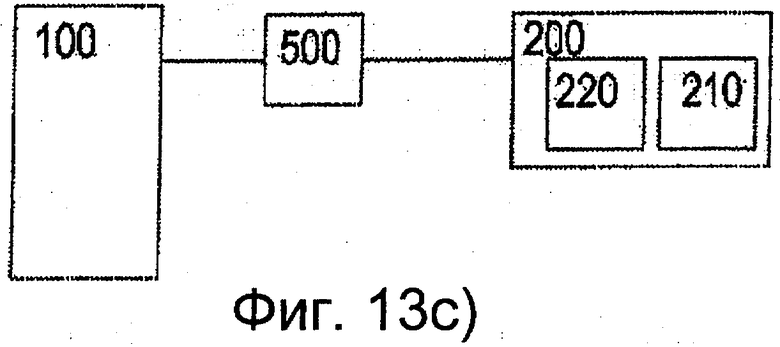
Фиг.8а, b. Блок-схемы для наглядного представления принципиальной структуры предлагаемого устройства.
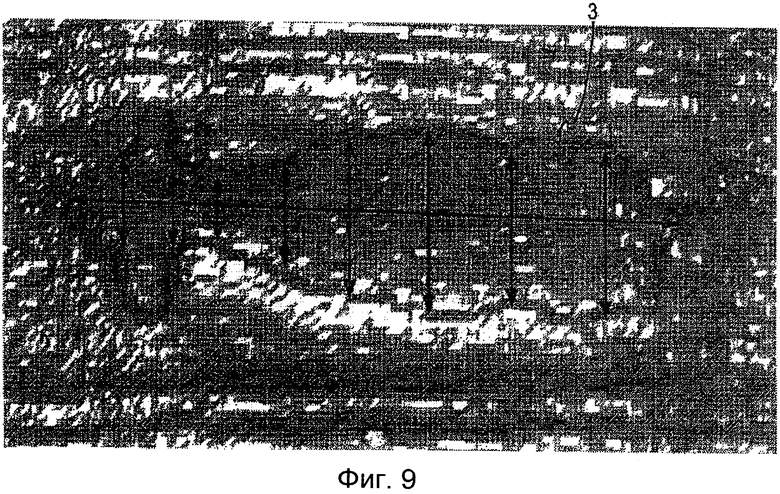
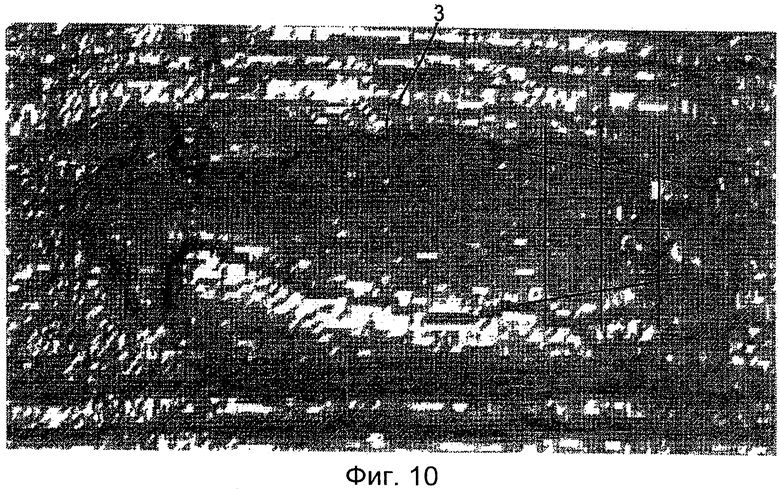
Фиг.9, 10. Снимки, созданные посредством трехмерных камер.
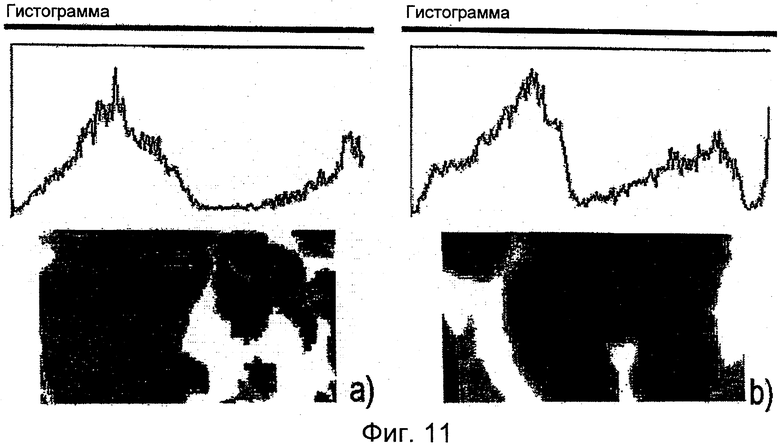
Фиг.11. Снимки животных и соответствующие гистограммы.
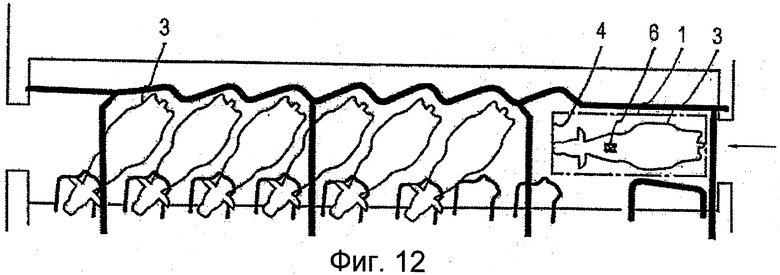
Фиг.12. Схематичное изображение доильной установки с проходом для животных согласно фиг.1.
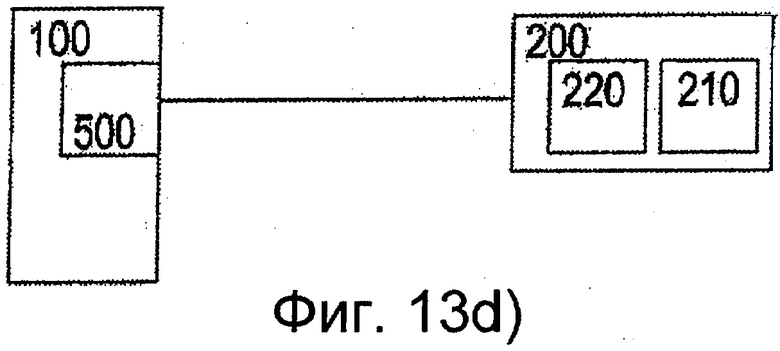
Фиг.13а-d. Дополнительные блок-схемы для наглядного представления принципиальной структуры предлагаемого устройства.
В качестве примера на чертежах представлены изображения с коровами. Несмотря на это, заявленные устройство и способ подходят и для других животных, в частности дойных, например овец и коз, а также для таких недойных животных, как свиньи.
На фиг.1 представлен проход 1 для животных с полом 2, по которому в переднем направлении X движется животное, в данном случае подлежащая дойке корова 3. Сбоку проход может быть ограничен не показанными на чертеже стенками. На фиг.12 представлен вид сверху на доильную установку с таким проходом 1.
Проход для животных оснащен устройством для предоставления информации о животных при их прохождении через данный проход, как схематично показано на фиг.8а и 8b, а также 13a-d.
Устройство для предоставления информации о животных при их прохождении через проход содержит вычислительное устройство 100 (предпочтительно, устройство обработки данных с устройствами ввода и вывода и центральным процессором, с которым связано запоминающее устройство, и которое снабжено программой).
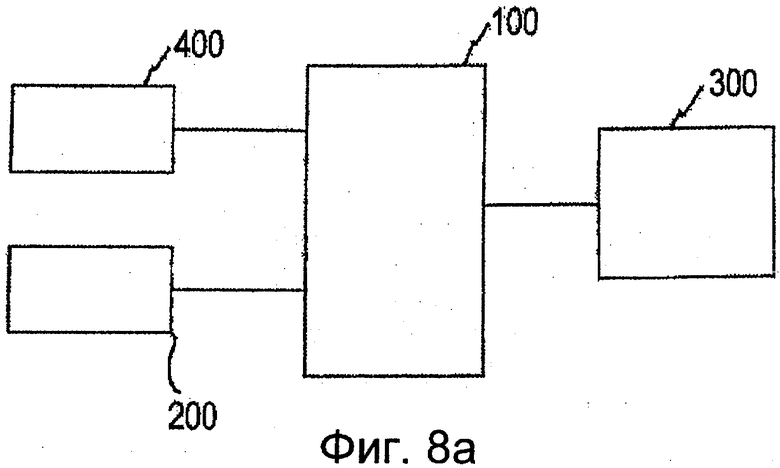
Кроме того, это устройство содержит соединенное с вычислительным устройством 100 распознающее устройство 200 с сенсорным устройством для регистрации данных о проходящих через проход животных и устройство 300 обработки данных для регистрации и суммирования счетных импульсов на основе обработки полученных от распознающего устройства данных о животных, которое может представлять собой отдельную программу или часть выполняющейся в вычислительном устройстве программы.
Распознающее устройство 200 предназначено для осуществления трехмерных съемок животных, причем посредством соответствующего способа обработки изображений (устройства 300 обработки данных) в трехмерных снимках распознаются животные. При каждом распознавании генерируется счетный импульс или увеличивается и сохраняется в памяти показание соответствующего счетчика.
Предпочтительно, заявленное устройство дополнительно содержит идентификационное устройство 400 для идентификации животных, подсчитанных или распознанных посредством распознающего устройства 200.
Идентификационное устройство 400 может быть образовано самим распознающим устройством 200 (или устройством обработки данных). При этом точные снимки животных, выполненные посредством распознающего устройства 200, используют также для идентификации животных посредством сравнения с более ранними снимками, сохраненными в устройстве 100 обработки данных (фиг.8b).
Однако идентификационное устройство можно выполнить иначе, например, согласно фиг.1 (этому устройству соответствует изображение на фиг.8а).
В соответствии с фиг.1 идентификационное устройство 400 содержит раму 4, которая действует как передатчик и/или приемник и предназначена для беспроводного считывания данных от схематично показанного RFID-модуля 5 (предпочтительно, этот модуль представляет собой респондер), который носит корова. Предпочтительно, рама идентификационного устройства при необходимости также может осуществлять запись в RFID-модуль 5. Рама 4 имеет такие размеры, что через нее могут проходить идентифицируемые животные.
Идентификационное устройство 400 связано с распознающим устройством 200, из которого на фиг.1 в качестве сенсорного устройства схематично показана трехмерная камера 6. Эта камера также может содержать устройство обработки данных.
Устройство, представленное на фиг.13, содержит соединенное с вычислительным устройством 100 распознающее устройство 200, включающее в себя сенсорное устройство 210 для сбора данных о проходящих через проход животных и устройство 220 обработки данных, в котором с применением соответствующего способа обработки изображений обрабатываются собранные трехмерные данные. Распознающее устройство 200 связано с еще одним средством 500 обработки данных, которое регистрирует и обрабатывает данные, полученные от распознающего устройства 200. Так, например, можно регистрировать и суммировать счетные импульсы. Средство 500 обработки данных может представлять собой отдельное устройство (фиг.13а) или компонент программы, выполняемой в вычислительном устройстве 100 (фиг.13b).
Идентификационное устройство 400 также может быть образовано самим распознающим устройством 200 и дополнительными датчиками (например, камерами цветного изображения). С этой целью точные снимки животных, осуществленные посредством распознающего устройства 200 и опционально имеющихся дополнительных датчиков, используют также для идентификации животных посредством сравнения с более ранними снимками, сохраненными в устройстве 100 обработки данных (фиг.13с и 13d).
Обычно животные заходят в доильную установку через зону входа. В этом случае в этой зоне находится устройство согласно фиг.1. Распознающее устройство 200 пространственно может быть расположено перед идентификационным устройством или после него, предпочтительно, оно расположено перед идентификационным устройством (если смотреть в направлении X движения).
Если животное входит в область перед идентификационным устройством 400 или после него, распознающим устройством 200 выполняется один или несколько трехмерных снимков (см. фиг.2b, 9 и 10).
Эти трехмерные снимки обрабатываются одним из способов обработки изображений, чтобы определить, сколько животных отображено на снимке - одно или несколько. В частности, существует возможность автоматически распознавать в том числе и проблемные случаи, соответствующие фиг.5-7, и, тем не менее, правильно определять количество животных.
После этого следует выдача информации о количестве животных, прошедших зону входа в направлении доильной установки.
Благодаря применению трехмерной камеры, стереографии или лазерной триангуляции с лазерной профилометрией (или, в общем, трехмерной съемки) подсчет животных при всех ситуациях, обычно возникающих в рабочем процессе, в том числе изображенных на фиг.5-7, можно осуществить с низкой частотой ошибок. Кроме того, можно получить большое количество дополнительных данных.
Получение трехмерных данных можно осуществлять разными способами.
В соответствии с фиг.2а для создания трехмерных снимков применяют трехмерную камеру, выполненную с возможностью создания и сохранения непосредственной трехмерной информации по каждому элементу изображения. Это схематично показано на фиг.2а и 2b. В этом случае, в отличие от двухмерных снимков, получают не только отраженную графическую информацию, но и информацию о дальности на уровне элемента изображения. Для этого целенаправленно излучают модулированный свет и измеряют время, которое проходит до момента приема фотона камерой (измерение времени пролета).
В соответствии с фиг.3 применяют стереографическое устройство. Это устройство содержит, по меньшей мере, две камеры 7, 8, расположенные на фиксированном расстоянии друг от друга, чтобы создавать трехмерное изображение. В случае стереографии, которая сама по себе известна, из различных положений делают два фотоснимка. Чтобы не передвигать одну камеру в два разных положения, фотоснимки предпочтительно делают посредством двух камер 7, 8, расположенных на фиксированном расстоянии друг от друга. В результате объединения этих двух изображений с использованием техники обработки данных возникает трехмерное изображение.
В соответствии с фиг.4 применяют устройство 10 для лазерной триангуляции с лазерной профилометрией. При этом посредством спроецированного луча лазера 11 создают световое сечение, которое так же обрабатывают посредством камеры 9, расположенной под постоянным углом к лазеру 11. Это показано на фиг.4. Лазер 11 и камера 9 установлены на фиксированном расстоянии друг от друга. Источник лазерного излучения, например, проецирует лазерный луч (этот луч также называют лучевой завесой). Если в эту завесу входит какое-либо тело, то происходит "пересечение", а отражения воспринимаются камерой. После этого по углу α вычисляют дальность.
Камеры 6, 7, 8 и 9, предпочтительно, расположены над животным.
Группа изобретений относится к области животноводства. Устройство для предоставления информации о животных при их прохождении через проход (1) для животных содержит соединенное с вычислительным устройством распознающее устройство с сенсорным устройством для сбора данных о животных, проходящих через проход, и устройство обработки данных для распознавания животных в полученных сенсорным устройством данных/сигналов и выдачи счетных импульсов при распознавании в этих сигналах животных. Сенсорное устройство выполнено с возможностью создания трехмерных изображений. Устройство обработки данных выполнено с возможностью распознавания животных в трехмерных данных указанных трехмерных изображений и подсчета животных на основании этого распознавания. Посредством распознающего устройства получают данные о проходящих через проход животных и оценивают их посредством устройства обработки данных. На основании этой оценки генерируют счетные импульсы, чтобы запустить счетчик животных в устройстве обработки данных или в вычислительном устройстве. Распознавание животных включает в себя, по меньшей мере, следующие шаги: создают трехмерные данные из трехмерных снимков животных или частей тела животных, обрабатывают эти трехмерные данные, для чего, по меньшей мере, генерируют счетные импульсы. Обеспечивается минимизирование числа ошибочных сопоставлений при занятии доильной площадки. 5 н. и 21 з.п. ф-лы, 13 ил.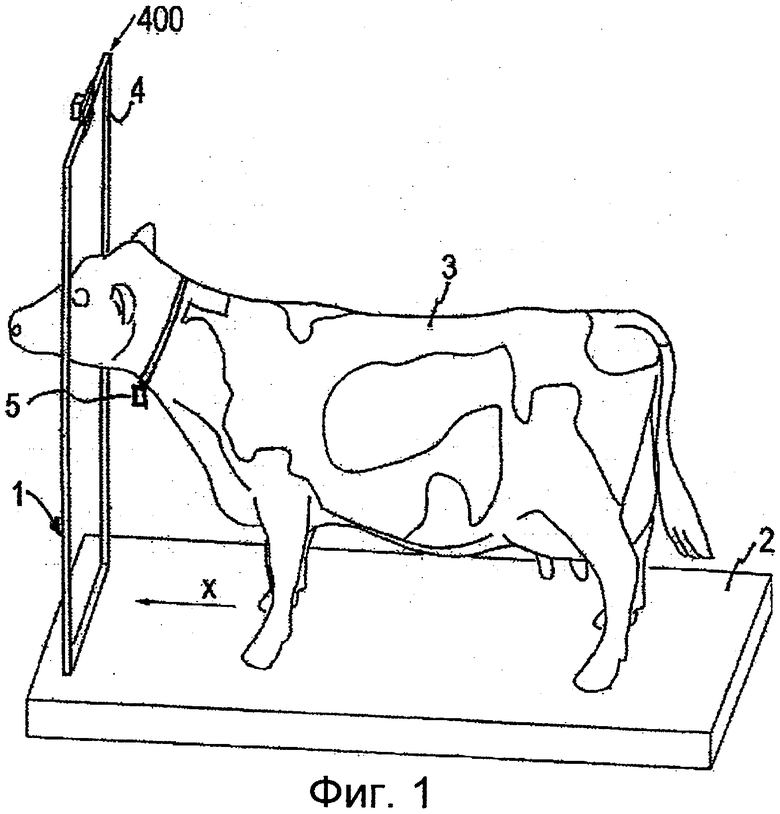
1. Устройство для предоставления информации о животных при их прохождении через проход (1) для животных, в которой содержится, по меньшей мере, число животных, проходящих через указанный проход, содержащее:
a. по меньшей мере одно соединенное с вычислительным устройством (100) распознающее устройство (200) с сенсорным устройством (210) для сбора данных о животных, проходящих через проход;
b. и устройство обработки данных (220, 300) для распознавания животных в полученных сенсорным устройством данных и выдачи счетных импульсов при распознавании в этих сигналах животных, отличающееся тем, что
c. сенсорное устройство (210) выполнено с возможностью создания трехмерных изображений и
d. устройство обработки данных (220, 300) выполнено с возможностью распознавания животных в трехмерных данных указанных трехмерных изображений и подсчета животных на основании этого распознавания.
2. Устройство по п.1, отличающееся тем, что сенсорное устройство (210) содержит по меньшей мере одну трехмерную камеру (6).
3. Устройство по п.1, отличающееся тем, что сенсорное устройство (210) с осветительным устройством и двухмерной цифровой камерой выполнено с возможностью определения трехмерных данных посредством измерения времени пролета.
4. Устройство по п.1, отличающееся тем, что сенсорное устройство (210) выполнено с возможностью регистрации стереографического изображения.
5. Устройство по п.3, отличающееся тем, что сенсорное устройство (210) для регистрации стереографических снимков имеет две камеры (7, 8), расположенные в пространстве на некотором расстоянии друг от друга.
6. Устройство по любому из пп.1-5, отличающееся тем, что сенсорное устройство (210) выполнено как устройство (10) для лазерной триангуляции.
7. Устройство по любому из пп.1-5, отличающееся тем, что оно дополнительно содержит идентификационное устройство (400) для идентификации распознанных животных.
8. Устройство по любому из пп.1-5, отличающееся тем, что идентификационное устройство (400) выполнено с возможностью идентификации животных посредством считывания данных с идентификационного средства на животном.
9. Устройство по любому из пп.1-5, отличающееся тем, что идентификационное устройство (400) выполнено с возможностью идентификации животных посредством беспроводного считывания данных с идентификационного средства в виде RFID-чипа/метки на животном.
10. Устройство по любому из пп.1-5, отличающееся тем, что вычислительное устройство (100) выполнено с возможностью непосредственной идентификации животных посредством сравнения снимков, выполненных распознающим устройством (200), с сохраненными в памяти данными за прошедшее время.
11. Устройство по любому из пп.1-5, отличающееся тем, что устройство (220, 300) обработки данных выполнено с возможностью получения дополнительных, характерных для данного животного, данных из выполненных распознающим устройством трехмерных снимков.
12. Устройство по любому из пп.1-5, отличающееся тем, что устройство (220, 300) обработки данных выполнено с возможностью получения данных об упитанности из выполненных сенсорным устройством (210) трехмерных снимков.
13. Устройство по п.12, отличающееся тем, что вычислительное устройство (100) выполнено с возможностью обработки и записи в память данных об упитанности.
14. Устройство по п.12, отличающееся тем, что вычислительное устройство (100) выполнено с возможностью автоматической оптимизации раздачи кормов на основании определенных и сохраненных в памяти данных об упитанности.
15. Устройство по п.12, отличающееся тем, что вычислительное устройство (100) выполнено с возможностью выдавать данные об упитанности в табличном и/или графическом виде.
16. Устройство по п.12, отличающееся тем, что вычислительное устройство (100) выполнено с возможностью автоматического сигнального оповещения при критических и/или отклоняющихся данных об упитанности.
17. Устройство по п.12, отличающееся тем, что в нем упитанность определяют, обрабатывают и/или сохраняют в памяти по схеме оценки показателя кондиции животных.
18. Доильная установка, отличающаяся наличием устройства по любому из пп.1-17.
19. Применение устройства по любому из пп.1-17 как части автоматической доильной установки.
20. Применение устройства по любому из пп.1-17 как части системы управления движущимися устройствами автоматической доильной установки.
21. Способ предоставления информации о животных при их прохождении через проход для животных с устройством по любому из пп.1-17, содержащий следующие шаги:
a. посредством распознающего устройства (200) получают данные о проходящих через проход животных и оценивают их посредством устройства (220, 300) обработки данных;
b. на основании этой оценки генерируют счетные импульсы, чтобы запустить счетчик животных в устройстве обработки данных или в вычислительном устройстве (100),
отличающийся тем, что
c. распознавание животных включает в себя, по меньшей мере, следующие шаги:
i. создание трехмерных данных из трехмерных снимков животных или частей тела животных;
ii. обработка этих трехмерных данных включает в себя, по меньшей мере, генерирование счетных импульсов.
22. Способ по п.21, отличающийся тем, что он дополнительно включает в себя идентификацию животных посредством идентификационного устройства (400).
23. Способ по п.21 или 22, отличающийся тем, что он дополнительно содержит идентификацию животных согласно трехмерным данным, полученным распознающим устройством (200).
24. Способ по п.21 или 22, отличающийся тем, что он дополнительно включает в себя определение дополнительного параметра животного согласно трехмерным данным, полученным распознающим устройством (200).
25. Способ по п.24, отличающийся тем, что дополнительный параметр животного представляет собой параметр, характеризующий состояние здоровья животных.
26. Способ по п.21 или 22, отличающийся тем, что дополнительный параметр постоянно сохраняют в базе данных при каждом процессе дойки.
| US 20050257748 А1, 24.11.2005 | |||
| Устройство для ворошения валков сельскохозяйственных культур | 1979 |
|
SU858641A1 |
| WO 2007064202 А1, 07.06.2007 | |||
| WO 1995028807 А1, 26.10.1995 | |||
| DE 102007055704 А1, 26.06.2008. | |||

