Настоящее изобретение относится к способу определения балльной оценки упитанности (БОУ), живого веса и индекса фертильности живого существа.
Также настоящее изобретение также относится к аппарату, предназначенному для балльной оценки упитанности, живого веса и индекса фертильности живого существа, в котором реализован упомянутый метод.
Более точно, настоящее изобретение относится к способу расчета балльной оценки упитанности или БОУ посредством обработки профиля одной или нескольких анатомических областей исследуемого объекта, которая предполагает использование по меньшей мере одного профилометра, по меньшей мере одного блока обработки данных и по меньшей мере одной программы, выполняющей специальную обработку профиля. В данном случае упомянутый профиль означает форму кривой, описывающей по меньшей мере часть внешнего периметра секции анатомической области исследуемого объекта, такого рода кривая располагается в воображаемой плоскости, пересекающий упомянутую анатомическую область. В частности, для применения способа в соответствии с настоящим изобретением необходимо создание профиля, размер и форма которого пропорциональны (степень пропорциональности также неизвестна) абсолютному размеру и физической форме объекта.
Упомянутый способ вводит новый безразмерный индикатор упитанности, называемый «синтетический индекс откорма» (Synthetic Fattening Index) или «индекс откорма» (Fattening Index) FI или R, который, в отличие от балльной оценки упитанности, не зависит от видовых признаков, породы, пола, возраста и абсолютного размера исследуемого объекта.
Этот способ также позволяет с хорошим приближением определить вес живого существа, взяв за основу синтетический индекс откорма FI (или эквивалентную балльную оценку упитанности) и другие информативные характеристики объекта, а именно видовые признаки, породу, пол, возраст.
Также этот способ вводит новый индикатор индекса фертильности наблюдаемого объекта. Этот индекс представляет собой сочетание индекса откорма FI (или эквивалентную балльную оценку упитанности) и эструса. В настоящее время для увеличения шансов на успех при искусственном осеменении чаще всего используется только индикация эструса. Однако, объект может находиться в состоянии эструса, но при этом степень упитанности может не отвечать требованиям концепции. Целью индекса фертильности, предлагаемого и реализуемого согласно данной способу, является совершенствование индикатора эструса путем его дополнения информацией о степени упитанности, и результатом такого сочетания становится индекс фертильности F.
Вводимый настоящим изобретением способ балльной оценки упитанности, определения веса и индекса фертильности также демонстрирует устойчивость к возможным ошибкам, которые могут возникнуть в ходе использования аппарата оператором, а также в плане вероятных скелетных вариаций различных объектов.
Также преимуществом упомянутого способа над известным уровнем техники является возможность применения даже простых устройств (например, смартфонов), то есть отсутствие необходимости приобретения дополнительной аппаратуры. Это является прямым следствием того факта, что способ в соответствии с настоящим изобретением предполагает анализ профиля без его соотнесения с абсолютным физическим размером.
Уровень техники
Каждому живому существу для выполнения своих биологических функций требуется непрерывное восполнение энергетических запасов. Животные, которых касается настоящее изобретение, получают энергию из пищи и сохраняют ее в организме в виде жировых запасов.
Балльная оценка упитанности или БОУ представляет собой способ оценки упитанности животного или его энергетических запасов, которую обычно выполняет прошедший надлежащую подготовку технический работник визуальным способом и/или ощупыванием.
Как правило, упитанность крупного рогатого скота оценивается в баллах от 1 до 5 (в различных странах могут применяться различные шкалы, однако, все эти шкалы взаимосвязаны линейными преобразованиями), при этом минимальным 1-м баллом оценивается очень худое животное, а максимальный балл 5 соответствует тучному животному.
Классификация промежуточных балльных оценок: 2 худая особь, 3 особь в хорошей физической форме, 4 особь с избыточным весом.
Шкала, описание которой представлено выше, также предполагает промежуточные деления, равные четверти единицы, например, 2,25 или 3,75 и т.д.
В следующем ниже описании БОУ измеряется по шкале от 1 до 5, хотя в различных странах мира БОУ определяется по шкале от 0 до 5 (во Франции), или по шкале от 1 до 9 (или подобной), которые в любом случае взаимосвязаны линейным преобразованием.
При определении БОУ способом субъективной визуальной оценки с учетом признаков породы и вида выявлены значительные отличия результатов обследований, выполняемых различными техническими работниками (проблемы субъективности и повторяемости оценки). Это приводит к значительным ошибкам в применении моделей прогнозирования, описание которых дано на известном уровне техники, и основанных на БОУ для оценки состояния животного для составления сбалансированного рациона животного на различных этапах жизни, для диагностирования метаболических расстройств, для ассистивного оплодотворения и т.д.
При интенсивном разведении продуктивных животных (например, крупного рогатого скота, овец и коз, свиней) БОУ представляет собой эффективный инструмент анализа состояния здоровья и энергетического баланса животного, обеспечивающий, посредством соответствующей обработки данных, формирование общих руководящих принципов по составлению рациона питания и управлению репродуктивными процессами.
На примере поголовья дойного стада было продемонстрировано, что оценка только веса животного не является достаточным индикатором процесса мобилизации жира при производстве молока. По этой причине способ балльной оценки упитанности привлек внимание как способ определения мобилизации тканей, например, для молочного скота (Домек (Domecq) и др., 1997b; Фламенбаум (Flamenbaum) и др., 1995).
Для удобства изложения в следующем ниже описании главным образом будет рассматриваться область интенсивного животноводства молочного скота без ограничения применимости изобретения к любым другим видам животных. Каждый данный здесь вывод легко применим в отношении любых других видов высших животных.
В отношении молочного скота причиной ожирения может являться откорм, не соответствующий потребностям последних 3-х или 4-х месяцев лактации, то есть в течение того периода, когда происходит естественное снижение молочной продуктивности, и животное, как правило, начинает накапливать излишки жировой ткани.
Даже чрезмерно длительные периоды отсутствия лактации (период молочного «сухостоя») или высококалорийное питание на этом этапе могут стать причиной излишней упитанности животного (перекормленности).
Известно, что слишком тучное жвачное животное испытывает трудности с отелом, а после отела это животное будет пребывать в фазе сухостоя, характеризующегося ростом уровня метаболических расстройств, таких как «синдром толстой коровы», кетоз и т.п. и, соответственно, нанесением экономического ущерба хозяйству.
Излишняя худоба (недокормленность) напротив может стать причиной низкой молочной продуктивности и низкого содержания жира в молоке, обусловленной недостаточными запасами энергии и протеинов.
Известно, что в зависимости от возраста коров называют телятами, телками и коровами; в частности, телятами являются быки и коровы в возрасте до одного года, к телкам относятся животные в возрасте от одного до трех лет, а коровами называют животных, возраст которых превышает 3 года, или животных до трех лет, если они отелились по меньшей мере один раз.
БОУ может с успехом использоваться для управления группой телок с целью оценки, на примере худых животных, вероятности того, что скорость их роста не будет достаточной для достижения половой зрелости в возрасте 13-15 месяцев, сопровождающейся обусловленными несоответствующим ростом проблемами при первом отеле и последующей низкой молочной продуктивностью в период лактации.
С другой стороны, было продемонстрировано, что слишком тучные телки имеют более низкую продуктивность по сравнению с другими коровами, имеющими требуемый вес при наступлении периода зрелости.
На протяжении цикла лактации упитанность коровы постоянно меняется и, соответственно, идеальная БОУ изменяется в зависимости от этапа лактации согласно широко известным моделям, таким как, например, модель, представленная на прилагаемой Фигуре 1.
Молодые коровы имеют отрицательный энергетический баланс и при преодолении этого этапа, характеризующегося увеличением молочной продуктивности примерно на 7 фунтов в расчете на каждый фунт мобилизованного веса, у них происходит мобилизация запасов.
Коровы или мясные коровы в конце периода лактации испытывают положительный баланс, сразу же после отела начинается восстановление потерянной упитанности.
В целом определение БОУ обеспечивает наличие ценной информации о здоровье наблюдаемых животных, будь то продуктивные животные (например, крупный рогатый скот, козы, свиньи или лошади) или животные-компаньоны (например, собаки и кошки).
Как показано на Фигуре 3, прилагаемой к настоящему документу, известный способ оценки основана на визуальном и тактильном восприятии БОУ заранее определенных областей тела, идентифицируемых, главным образом, на уровне бедренной части, поясницы, спины, маклоков, седалищных бугров и крестца, по возможности животное должно быть расслаблено, так как мышечная ригидность может негативно отразиться на точности наблюдений.
Хорошо известно, что этот тип визуального и тактильного определения БОУ характеризуется существенными недостатками, такими как высокая степень субъективности оценки, предполагающая низкую повторяемость числового значения по прошествии промежутка времени при выполнении оценки одним или разными техническими работниками, значительную продолжительность выполнения необходимого осмотра животного и высокие затраты, связанные с непрерывной профессиональной подготовкой технических работников.
Некоторое время назад этот способ визуальной оценки и тактильного определения был упрощен с помощью компьютерных средств, таких как прикладные программы для персональных ноутбуков, КПК, планшетов и смартфонов.
Эти прикладные программы содержат принципы, которыми выполняющий оценку специалист должен руководствоваться в ходе установления морфологических особенностей, на основании которых присваиваются баллы, таким образом, использование программ позволяет снизить продолжительность измерения, преобразования, передачи и обработки БОУ.
Также известен ряд новых программ, в которых разработчики попытались снизить количество исследуемых морфологических характеристик, что дополнительно снижает затрачиваемое время. В любом случае даже при условии соблюдения руководящих принципов оценка и окончательное решение принимается специалистом. Таким образом, не решена проблема субъективности измерения и низкой повторяемости результатов.
Также существуют программы, позволяющие сделать фотографии животного с различных ракурсов и предлагающие инструменты графического редактирования, посредством которых на полученных изображениях при их последующие обработке выделяются основные морфологические особенности.
Однако, не всегда удается получить качественные изображения, так как выдержка не всегда выполняется правильно, поэтому фотографии могут получиться слишком темными или слишком светлыми, для получения информации о поверхности тела исследуемого объекта в трехмерном формате возникает необходимость стирания тени. Тем не менее, установление морфологических особенностей выполняется техническим работником, следовательно, сохраняется субъективный характер измерения.
Для БОУ и оценки живого веса была разработана автоматическая система, в основу которой заложен анализ двухмерных изображений.
В патенте US 5474085 дано описание примера такого рода системы, а именно системы статического типа, функционирующей по принципу термографической оценки животных. В этом случае, учитывая статичный характер геометрической модели, количество пикселей на температурном изображении, связанным с животным, напрямую зависит от его веса.
В патентах US 5483441 и US 5576949 представлено описание дополнительного примера, а именно систем анализа большого количества двухмерных изображений, таких как одновременно выполняемых изображений животного сверху и сбоку и/или изображений следующими друг за другом мгновений движущегося животного с использованием камер и систем датчиков неизменной и известной конфигурации.
Системы такого типа позволяют выполнить измерения абсолютных величин, таких как высота, ширина и длина, на основании которых определяется БОУ и вес путем сравнения с моделями животных, характеристики которых известны.
В патенте US 5944598 представлен другой пример, а именно описание системы, извлекающей профиль животного из изображения и определяющей геометрические параметры системы путем оценки расстояния между исследуемым объектом и средством измерения, например, посредством лазерного дальномера. На основании профиля выполняется оценка морфологических и/или весовых признаков.
Основным ограничением этих автоматизированных систем оценки является сложность общего применения решений в периметре стойла. Это подразумевает высокие расходы, низкую надежность решения и недостаточную точность и низкую повторяемость результатов.
Некоторое время назад были разработаны автоматические системы определения БОУ и веса путем трехмерного сканирования.
В патенте US 20140029808 представлен пример, а именно описание системы, выполняющей трехмерное сканирование, например, с использованием времяпролетных (TOF) лазерных дальномеров, оценивающих БОУ путем анализа облака точек и его сравнения с набором эталонных образцов для различных значений БОУ.
В патенте US 8351656 дано описание другого примера, а именно системы, выполняющей трехмерное сканирование, например, посредством структурированного света, стереоскопических камер и лазерных дальномеров, оценивающих вес путем анализа облака точек, создаваемого системой сбора данных, и его сравнения с набором эталонных моделей.
В этом случае устройство представляет собой портативное решение и ряд математических решений, применяемых для определения ориентации и расположения животного по отношению к измерительному инструменту.
Дополнительный патент US 6377353 позволяет применять описанный выше способ для расчета морфометрических параметров.
В патенте US 6549289 дано описание аналогичного принципа трехмерного анализа с использованием структурированного света, при этом наблюдение ведется с применением системы стереоскопических камер, а расчет осуществляется на основе метода триангуляции.
Даже в случае применения этого класса решений основным ограничением является высокая сложность технологического решения, применение которого на практике в периметре стойла представляется весьма затруднительным, а также сложность обучения технических работников, в задачу которых обычно входит управления этой системой.
Эти решения являются дорогостоящими, очень чувствительными и, следовательно, ненадежными для указанной области применения.
Также эти решения характеризуются недостаточной точностью и низкой повторяемостью результатов.
Также существует ряд патентов, таких как ЕР 1537531 В1 (из WO 2004/012146 А1) и ЕР 2370952 В1, согласно которым также определяется облако точек анатомической области путем трехмерного сканирования. Эти патенты реализуют различные способы анализа главной кривизны исследуемых поверхностей, которые, однако, в полной мере применяют характеристики трехмерного сканирования, позволяя определить абсолютные координаты выявляемых точек и затем абсолютного размера.
Таким образом, для применения этих способов необходима система трехмерного сканирования и, следовательно, они не применимы на простых устройствах, например, оснащаемых одной двухмерной камерой (например, смартфонах).
Более того, было доказано, что продукты, принцип работы которых основан на этих способах, характеризуются низкой точностью и повторяемостью на граничных участках диапазона измерения балльной оценки упитанности (например, БОУ < 2 для очень худого животного, а БОУ > 4 для очень тучного животного), а именно в тех случаях, когда правильный диагноз играет важную роль в определении наиболее подходящих мер, нацеленных на восстановление надлежащего типа упитанности.
Описание других аналогичных решений дано в:
- US 2005/257748 A1, ЛЕРОЙ Т (LEROY Т) И ДР.: «Автоматическое определение балльной оценки упитанности молочных коров на основании двухмерных изображений», ЕВРОПЕЙСКАЯ КОНФЕРЕНЦИЯ ПО ТОЧНОМУ ЖИВОТНОВОДСТВУ 2, 2005, УППСАЛА, WAGENINGEN ACADEMIC PUBL, NL, 1 января 2005, страницы 251-255, ХРО 09127881, ISBN: 978-90-76998-68-8,
- WO 2010/063527 A1 (DELAVAL HOLDING AB [ШВЕЦИЯ]; LIAO BOHAO [SE]; KRUKOWSKI MARILYN (МЭРИЛИН КРЮКОВСКИ) [ШВЕЦИЯ]) 10 июня 2010,
- ЕР 2 027 770 A2 (ICEROBOTICS LTD [ВЕЛИКОБРИТАНИЯ]) 25 февраля 2009,
- Мэрилин Крюковски (Marilyn Krukowski): «Автоматическое определение балльной оценки упитанности молочных коров на основании трехмерных изображений», диссертация магистра информатики, ISSN: 1653-5715, 26 января 2009 (2009-01-26), страницы 1-89, ХР 055051333, D6 KTH, Стокгольм, Швеция, http://www.csc.kth.se Ссылка на ресурс в интернете: URL:http://www.nada.kth.se/utbildninglgrukthlexjobblrapportlistor/2009/rapporter09/kruk0wski_marilyn_09009.pdf [актуально на 2013-01-28];
- US 2013/201470 A1 (ЭЛИСОН ДЭВИД (ALLISON DAVID) [США] И ДР.) 3 октября 2013;
- WO 2010/107383 на (INNOVATOR SKAANE AB [ШВЕЦИЯ]; FLODMARK CARLERIK [SE]) 23 сентября 2010; и
- WO 96/04551 A1 (MEAT RESEARCH CORP [АВСТРАЛИЯ]; ФОРЕСТ АЛЕКСАНДР (FORREST ALEXANDER) [АВСТРАЛИЯ]; ГОРДОН ЭНТОНИ ДЖОН (GORDON ANTHONY JOHN) [) 15 февраля 1996.
Таким образом, с учетом вышесказанного, задачей настоящего изобретения является предоставление способа и аппарата, не имеющих недостатков известного уровня техники.
В частности, задачей настоящего изобретения является внедрение автоматической и легко реализуемого способа расчета FI и соответствующей БОУ, живого веса и индекса фертильности.
Другой задачей настоящего изобретения является создание реализующего указанный способ аппарата, который был бы дешевым, несложным в изготовлении, надежным, отвечающим требованиям области использования и применимым к любому животному независимо от видовых признаков, породы, пола, возраста и абсолютного размера.
Именно поэтому сущностью настоящего изобретения является способ и аппарат согласно определению независимых пунктов формулы изобретения.
Предпочтительные варианты осуществления изобретения определены в зависимых пунктах формулы изобретения.
Раскрытие изобретения
Ниже следует описание настоящего изобретения, в целях иллюстрации, но не ограничивающее объем изобретения, в соответствии с предпочтительными вариантами осуществления изобретения со ссылкой на конкретные фигуры, представленные на прилагаемых чертежах, в которых:
- Фигура 1 содержит графическое изображение известного уровня техники, представляющего типичную тенденцию изменения значения балльной оценки упитанности (пунктирная линия) и молочной продуктивности (сплошная линия) здорового жвачного животного в зависимости от периода лактации (указан по оси абсцисс);
- На Фигуре 2 приведено несколько примеров анатомических областей, представляющих морфологический интерес, а именно поясничная область (L), брюшной отдел (А), крестцовый отдел (S), бедренная область (F), грудная клетка (Р), ягодичная область (G) и область спины (D) различных видов животных и человека;
- На Фигуре 3 представлено графическое изображение известного уровня техники относительно соответствия упитанности животного значению БОУ;
- На Фигуре 4 представлено графическое изображение известного уровня техники относительно соответствия упитанности человека значения ИМТ (индекса массы тела);
- На Фигуре 5 представлена блок-схема аппарата в соответствии с настоящим изобретением;
- На Фигуре 6а представлен первый вариант осуществления аппарата, блок-схема которого изображена на Фигуре 5, в виде портативного прибора с ручным управлением, использующего профилометр оптического типа;
- На Фигуре 6b представлен аппарат, изображенный на Фигуре 6а, в процессе использования техническим работником в периметре стойла для молочного скота;
- На Фигуре 7 представлен профиль поясничного отдела молочной коровы, вид сверху;
- На Фигуре 8 представлен способ обработки упомянутого профиля, изображение которого дано на Фигуре 7;
- На Фигуре 9 представлен этап определения точек касания профиля согласно способу настоящего изобретения;
- На Фигуре 10 изображена блок-схема способы определения точек касания профиля;
- На Фигуре 11 представлен второй вариант осуществления аппарата, блок-схема которого изображена на Фигуре 5, стационарного автоматического типа, применяемого в боксе для взвешивания;
- На Фигуре 12 также изображен второй вариант осуществления аппарата, блок-схема которого представлена на Фигуре 5, стационарного автоматического типа, применяемого во вращающейся доильной установке;
- На Фигуре 13 изображен третий вариант осуществления аппарата, блок-схема которого представлена на Фигуре 5, автоматического типа, перемещаемого по направляющим, установленным в ленточной доильной установке;
- На Фигуре 14 представлена блок-схема функций обнаружения и управления первого варианта осуществления аппарата в соответствии с изобретением;
- На Фигуре 15 изображена блок-схема функций обнаружения и управления второго и третьего вариантов осуществления аппарата в соответствии с изобретением;
- На Фигуре 16 изображена блок-схема функций предварительной обработки и обработки, присутствующих во всех вариантах осуществления аппарата в соответствии с изобретением;
- На Фигуре 17 изображен четвертый вариант осуществления аппарата, блок-схема которого представлена на Фигуре 5, автоматического типа, устанавливаемый в переходе, который животное может свободно преодолевать;
- На Фигуре 18 представлен первый пример выделения профиля путем ручного нанесения цветной краски;
- На Фигуре 19 представлен второй пример выделения профиля с помощью цветной краски, наносимой автоматическим способом;
- На Фигуре 20 представлен третий пример выделения профиля путем нанесения цветной клейкой пленки;
- На Фигуре 21 представлен дополнительный вариант осуществления аппарата, блок-схема которого изображена на Фигуре 5, статического автоматического типа, получаемый путем позиционирования необходимого количества камер высокого разрешения над стойлом, в котором находятся животные;
- На Фигуре 22 представлен дополнительный вариант осуществления аппарата, блок-схема которого изображена на Фигуре 5, статического ручного типа, в котором профиль образуется с помощью специального гребенчатого профилометра электронного типа;
- На Фигуре 23 представлен дополнительный вариант осуществления аппарата, блок-схема которого изображена на Фигуре 5, автоматического динамического типа, в котором профиль образуется с помощью набора электронных гибких датчиков; и
- На Фигуре 24 представлен дополнительный вариант осуществления аппарата, блок-схема которого изображена на Фигуре 5, в котором профиль образуется с помощью трехмерного сканера, например, времяпролетного типа.
Сущностью настоящего изобретения являются аппарат и способ расчета нового синтетического индекса откорма FI путем определения и обработки ряда морфологических особенностей животных. На основании этого индекса выводится значение балльной оценки упитанности или БОУ. Выполняется расчет сочетания упомянутого FI и других параметров, характеризующих морфологию и поведение исследуемого объекта, живого веса и синтетического оценочного индекса фертильности.
Как показано на Фигуре 5, аппарат D предназначен для реализации способа в соответствии с настоящим изобретением, при этом упомянутый способ заключается в определении профиля одной или нескольких анатомических областей исследуемого объекта с использованием по меньшей мере одного профилометра, по меньшей мере одного блока обработки данных и по меньшей мере одной программы, внедряющей специальный способ обработки. Упомянутый профиль в данном случае означает форму кривой, описывающей по меньшей мере часть внешнего периметра участка анатомической области исследуемого объекта, такого рода кривая располагается в воображаемой плоскости, пересекающий упомянутую анатомическую область. В частности, для реализации способа в соответствии с настоящим изобретением требуется профиль, размер и форма которого пропорциональны (степень пропорциональности также неизвестна) размеру и абсолютной физической форме объекта.
Затем в блоке обработки данных выполняется обработка упомянутого профиля, что необходимо для получения числового значения синтетического индекса, отражающего жировые запасы, и затем непосредственно упитанности объекта. Аппарат D содержит по меньшей мере один профилометр (на конце которого в случае, представленном на Фигуре, устанавливается камера 102), по меньшей мере один блок управления 101 и по меньшей мере один блок обработки данных Е. Если блок обработки данных установлен удаленно, то аппарат D будет включать в себя по меньшей мере один блок передачи данных.
Существует ряд физических принципов, используемых для определения, контактным или бесконтактным способом, упомянутого профиля на пространственной криволинейной поверхности. Среди этих принципов можно выделить те, которые наилучшим образом применимы к исследуемой области. В качестве примера, не являющегося ограничением, будет проиллюстрирован ряд областей применения этих принципов согласно целям настоящего изобретения. Области применения можно разделить на две основные категории: (а) определение профиля бесконтактным способом, (b) определение профиля контактным способом.
В целом следует отметить, что согласно целям настоящего изобретения используемый способ должен обеспечивать возможность его применения в открытом поле для исследования реальных животных, характеризующихся более или менее нерегулярным покровом в зависимости от видовых признаков и породы.
При бесконтактном способе применения между инструментом и телом исследуемого объекта применяются решения, основанные на анализе изображений, получаемых с использованием двухмерной камеры.
В этом случае для выделения конкретной анатомической области исследуемого объекта, что необходимо для ее определения посредством аппаратуры с функцией записи видео, может использоваться источник структурированного света. Если предположить, что шаблон состоит из одного или нескольких рядов, расположенных поперечно хребту исследуемого объекта в конкретной анатомической области (например, поясничная область (L), брюшной отдел (А), крестцовый отдел (S), бедренная область (F), грудная клетка (P), ягодичная область (G), область спины (D) или область черепа в ряде особых случаев), представляется возможным выполнить проекцию шаблона (структурированный свет) на тело исследуемого объекта в изучаемой анатомической области. В этом случае аппарат D будет включать в себя источник когерентного (например, генератор лазерной линии) или некогерентного 103 излучения, этот источник излучения проецирует на объект множество дискретных или непрерывных точек, чтобы выделить профиль 109 представляющей интерес морфологической области.
Этот способ реализует принцип оптической триангуляции или способ, позволяющий рассчитать расстояние между точками, применяя свойства треугольников. Для применения этого принципа необходимо точно знать взаимное положение камеры относительно источника структурированного света и исследуемого объекта, так как эти данные служат основой для расчета абсолютных координат объектов обнаружения в пространстве.
Способ в соответствии с настоящим изобретением не требует применения данных об абсолютном размере исследуемого объекта, поэтому принцип оптической триангуляции может применяться независимо от взаимного положения камеры относительно источника структурированного света и исследуемого объекта.
Благодаря этой особенности представляется возможным выделить изучаемую анатомическую область и в случае применения других техник, а именно:
a) прорисовка шаблона на изучаемой анатомической области туловища объекта или животного, например, путем нанесения краской множества дискретных или непрерывных точек (например, перпендикулярно линии хребта);
b) выделение изучаемой анатомической области с использованием клейкой пленки, вырезанной в форме шаблона, используемого для последующего этапа анализа;
c) выделение изучаемой анатомической области с использованием эластичной ленты, завязываемой вокруг изучаемой анатомической области в виде шаблона, используемого для последующего этапа анализа.
В этом случае также используется принцип оптической триангуляции, но по причине неполной информации о размерах измерительной системы представляется возможным определить только степень пропорциональности, при этом абсолютные измерения останутся неизвестными. Для применения способа в соответствии с настоящим изобретением информация о степени пропорциональности является достаточной, даже если могут быть получены данные об абсолютных измерениях.
В предпочтительном варианте осуществления изобретения цвет используемого линейного шаблона должен быть максимально контрастным по отношению к цвету поверхности исследуемого объекта, шаблон позиционируется поперечно хребту в средней части конкретной изучаемой анатомической области (например, для поясничной области на половине расстояния между выступами бедренных костей и грудной клеткой, как это показано на примере крупного рогатого скота на фигурах 2а, 6b и 7).
В рамках применения такого рода бесконтактных решений 109 по определению контура, аппарат D содержит камеру 102, выполненную с возможностью получения по меньшей мере одного двухмерного изображения упомянутого профиля, выделенного одним из описанных выше способов.
В соответствии с другим вариантом осуществления изобретения может использоваться трехмерная камера (3D сканер), например, времяпролетного типа (TOF) или стереоскопического типа, в сочетании с блоком управления, средствами которого осуществляется извлечение профиля 109 из облака точек, полученного путем трехмерного сканирования. В этом случае является достаточным просто сфокусироваться на изучаемой анатомической области, не выделяя профиль одним из описанных выше способов.
Следует подчеркнуть тот факт, что настоящий способ является независимой от выполнения абсолютных измерений, поэтому она может применяться как с использованием обычных камер (2D), так и трехмерных камер (3D), например, стереоскопических, времяпролетных или камер со смещением фазы. По этой же причине взаимное положение записывающего устройства относительно возможного генератора лазера не имеет значения.
Среди способов применения, подразумевающих физический контакт, имеется ряд способов, основанных на использовании контактных профилометров, а именно игольчатого профилометра или гребенчатого шаблона. С использованием этого инструмента представляется возможным определить профиль поверхности вдоль плоскости, пересекающей упомянутую поверхность и состоящую из множества игл, расположенных в одной плоскости и на одной линии, двигающихся в одном направлении. Применение этого инструмента позволяет определить профиль 109 механическим способом. Для построения компьютерного изображения профиля 109 измеряется положение каждой отдельной иглы с последующим преобразованием в цифровой формат.
Также среди способов применения, подразумевающих физический контакт, имеется ряд способов, заключающихся в определении контура 109 с использованием гибких датчиков. Эта система состоит из ряда последовательных датчиков, располагаемых на ленте без зазоров. Каждый датчик передает сведения о степени своего изгиба средствам блока управления, определяющим относительное положение всех датчиков, установленных вдоль одной полосы, и на основании этих данных выполняется построение компьютерного изображения профиля 109.
Выходной информацией всех возможных способов применения, описание которых дано в этом документе, является изображение профиля 109, предварительная обработка которого выполняется средствами блока управления 101, после чего данные направляются в блок обработки Е.
Аппарат, реализующий способ в соответствии с настоящим изобретением, может также содержать датчики положения Р, включая датчик наклона, такие как акселерометры, гироскопы и магнитометры.
Упомянутый аппарат также может включать в себя систему определения пространственного расположения (например, глобальную систему позиционирования или GPS).
Упомянутый аппарат может дополнительно содержать радиочастотное считывающее устройство (например, RFID ISO11784-785), облегчающее процесс электронной идентификации животных.
Упомянутый аппарат может дополнительно содержать систему идентификации и определения пространственного расположения исследуемых объектов в режиме реального времени (система позиционирования в режиме реального времени или RTLS), которая позволяет определить их мгновенное положение и поведение.
Упомянутый аппарат может дополнительно содержать систему определения эструса исследуемого объекта. В случае молочного скота используются шагомеры (для определения мгновенного увеличения подвижности относительно наступления эструса) или видео системы, предназначенные для выявления подъемного рефлекса с использованием техники окрашивания хвоста, или термочувствительных систем путем химического анализа молока или крови (например, определение концентрации прогестерона). Сочетание статуса эструса и оценка БОУ позволяют определить новый индекс, определяемый в рамках этого документа как индекс фертильности, как это описано ниже.
Упомянутый аппарат может взаимодействовать с локальным блоком управления 101, средства которого выполняют предварительную обработку данных, а именно кодирование и сжатие данных, хранение в виде изображения, например, посредством технологии цифровых водяных знаков, доступ к которому обеспечивается интерфейсом пользователя, предоставляемым удлинителем 105 и облегчающим правильную съемку изучаемой анатомической области.
Затем осуществляется передача этих данных в блок Е обработки данных, средства которого выполняют обработку с использованием алгоритма, подробное описание которого дано ниже. В предпочтительном варианте осуществления изобретения блок обработки данных устанавливается удаленно. Такое решение обеспечивает большие вычислительные возможности, более плавное эволюционное и корректирующее техническое обслуживания кода и соответствие политике непрерывности бизнес-процессов и аварийного восстановления (BC/DR) для защиты данных.
Вместе с этим, однако, не исключена возможность интеграции блока обработки Е в блок управления 101.
Упомянутый аппарат D может состоять по меньшей мере из одного смартфона, на который установлено соответствующее приложение, предназначенное для выявления, первичной обработки данных, непосредственной обработки или передачи данных, а также для получения и отображения результатов.
В целом способ обеспечивает обработку в по меньшей мере одном блоке обработки данных Е по меньшей мере одного профиля, как это определено выше, по способу обработки с тем, чтобы получить числовой индекс R, отражающий энергетические запасы, накопленные животным в виде жировой прослойки, в частности, в изучаемой анатомической области.
Также способ обеспечивает корреляцию средствами упомянутого по меньшей мере одного блока обработки данных с помощью предварительно определенного математического преобразования упомянутого числового индекса R, учитывающего один или несколько признаков упомянутого животного. Числовые параметры упомянутого математического преобразования могут зависеть по меньшей мере от видовых признаков и породы животного и получаются путем сравнения с референтной популяцией, оценка которой осуществляется визуально в соответствии с традиционным способом или иным эталонным способом.
Ссылаясь на фигуры 6а и 6b, первый вариант осуществления аппарата D содержит удлинитель 105, один конец которого удерживается техническим работником 108, при этом на второй конец устанавливается блок управления 101. Кнопка 106 позволяет техническому работнику управлять затвором фотообъектива, даже если удлинитель аппарата выдвинут максимально, чтобы достичь требуемого положения измерения, как это изображено на Фигуре 6b.
Упомянутым блоком управления 101 в этом случае может являться смартфон со встроенной камерой 102.
Ко второму концу удлинителя 105 может дополнительно подсоединяться лазерный рычаг, тем самым образуя между ними определенный угол наклона, облегчающий выполняемый техническим работником 108 процесс позиционирования, лазера 103 в поясничном отделе 109 исследуемого животного. В предпочтительном варианте осуществления изобретения, но не ограничиваясь только им, угол наклона составляет 135°. Это решение имеет наибольшие преимущества применительно к молочному скоту, характерной особенностью которого является значительный по сравнению с оператором 108 размер животного.
К концу лазерного рычага подсоединяется генератор 103 лазерного луча, работа которого контролируется блоком управления 101, который в свою очередь получает команды от технического работника 108, нажимающего на кнопку 106, расположенную, соответственно, на другом конце упомянутого удлинителя 105.
Также интерфейс пользователя, встроенный в блок управления 101, обеспечивает наличие резервных команд и управления с обратной связью по отношению к кнопке 106. Как правило, кнопка 106 используется в том случае, когда необходимо измерить БОУ объекта, размер которого значительно превышает рост технического работника 108, как в случае исследования крупного рогатого скота 107.
Если речь идет об объектах небольшого размера, таких как овцы или козы, технический работник 108 может удерживать удлинитель 105 в непосредственной близости от блока управления 101, обеспечивая прямое взаимодействие с интерфейсом пользователя.
После этого технический специалист 108 должен подтвердить изучаемую область тела одним из способов, о которых говорилось выше (если это необходимо), путем позиционирования аппарата D для выполнения камерой 102 съемки этой области.
Технический работник 108 нажимает на кнопку 106 для настройки профиля 109 камерой 102.
Назначение такого типа аппарата D состоит в определении по меньшей мере одного профиля 109 по меньшей мере одной изучаемой с точки зрения морфологии и анатомии области (например, поясничной области (L), брюшного отдела (А), крестцового отдела (S), бедренной области (F), грудная клетка (P), ягодичной области (G) и области спины (D)) объекта 107. Также в ряде конкретных случаев может выполняться изучение других областей тела (например, у диких животных).
Упомянутый профиль в данном случае означает форму кривой, описывающей по меньшей мере часть внешнего периметра участка анатомической области исследуемого объекта, такого рода кривая располагается в воображаемой плоскости, пересекающий упомянутую анатомическую область. В частности, для реализации способа в соответствии с настоящим изобретением требуется профиль, размер и форма которого пропорциональны (степень пропорциональности также неизвестна) размеру и абсолютной физической форме объекта.
Средства блока управления 101, используя известную технологию, выполняют шифрование и сжатие в одиночный пакет изображения персональных данных исследуемого объекта и, при наличии таковых, данных, зарегистрированных следующими датчиками:
a) датчиками положения Р, такими как акселерометр и/или магнитометр и/или гироскоп и/или GPS и/или средство локализации Wi-Fi;
b) системами идентификации RFID (радиочастотной идентификации) и т.п.;
c) системами идентификации и позиционирования в режиме реального времени (RTLS) и т.п.;
d) системами определения эструса или течки и т.п.
Затем упомянутые зашифрованные и сжатые в одиночный пакет данные передаются из блока управления 101 в блок обработки данных Е.
Блок обработки данных Е предназначен для дешифрования, используя известную технологию, полученной информации, ее регистрации в базе данных и объединения всех зарегистрированных данных исследуемого объекта 107.
Затем средствами блока обработки данных Е выполняется извлечение и обработка изображения в автоматическом или полуавтоматическом режиме с использованием соответствующих известному уровню техники процедур цифровой обработки, что необходимо для обеспечения действенного и эффективного способа координации пикселей, описывающих профиль 109 в области изображения.
Координаты этих пикселей могут впоследствии быть использованы для определения согласно способу, описание которого дано ниже, точек максимума PM, точек касания P1 и P'1 промежуточных точек  изображенных на фигурах 7 и 8.
изображенных на фигурах 7 и 8.
Применяя математическую формулу, приведенную ниже, средства блока обработки Е выполняют расчет значения синтетического индекса откорма FI, на основании которого определяется БОУ, привязывают его к дате измерения и сохраняют в базе данных в виде записи исследуемого объекта 107, которому присвоен уникальный идентификационный номер.
Ссылаясь на фигуры 9 и 10, способ определения FI, являющаяся предметом изобретения, оказывается применимой независимо от видовых признаков, породы, пола, возраста и абсолютного размера исследуемого объекта 107.
Способ характеризуется устойчивостью к возможным ошибкам использования аппарата оператором и/или скелетным вариациям различных объектов.
Способ оценки синтетического индекса откорма, соответствующего упитанности исследуемого объекта, основан на определении присутствия жировой прослойки в по меньшей мере одной области, изучаемой с точки зрения морфологии и анатомии (например, поясничная область (L), брюшной отдел (А), крестцовый отдел (S), бедренная область (F), грудная клетка (Р), ягодичная область (G) и область спины (D)) объекта 107.
Предлагаемый способ расчета учитывает профиль 109 анатомической области объекта 107. Упомянутый профиль может быть получен с помощью оптического триангуляционного профилометра, оснащаемого двухмерной камерой, в сочетании с одним из следующих способов выделения анатомической области исследуемого объекта. Первым способом является использование цветной краски для нанесения соответствующего шаблона на выбранную анатомическую область. Такая краска может наноситься, например, вручную кистью или карандашом, что необходимо для получения поперечной хребту линии. Аналогичным образом может использоваться шаблон, вырезанный из клейкой пленки и приклеиваемый на упомянутую анатомическую область, поверх этого шаблона с использованием пульверизатора разбрызгивается цветная краска (см. фигуру 18). Дополнительной возможностью автоматизации процесса нанесения является использование приспособления с необходимым количеством форсунок, предназначенных для разбрызгивания краски по определенному шаблону в ручном или автоматическом режиме (см. Фигуру 19). Такого рода окрашивание или химическая обработка должны обладать высокой стойкостью, водостойкостью, устойчивостью к солнечному излучению и абразивному воздействию. Также такого рода обработка должна легко определяться камерой 102 устройства при любом типе освещения. С этой целью может использоваться, например, люминесцентный лак или может применяться химическая обработка, результатом которой является локальное выпадение волос (например, обработка жидким азотом).
Второй способ заключается в применении соответствующей клейкой ленты, цвет которой является высококонтрастным по отношению к цвету исследуемого объекта в изучаемой анатомической области. Клейкой лентой необходимо обозначить шаблон, на основании которого выполняется измерение. Например, клейкая лента прямоугольной формы может приклеиваться на упомянутую анатомическую область перпендикулярно хребту, как это показано на Фигуре 20. Такой же эффект достигается при использовании эластичной ленты, форма которой воспроизводит шаблон изучаемой анатомической области.
Третий способ заключается в использовании лазерного генератора 103, устанавливаемого таким образом, чтобы выполнить проекцию шаблон на измеряемую анатомическую область. Например, лазер может проецировать линию, перпендикулярную хребту в упомянутой анатомической области.
Второй вариант осуществления изобретения состоит в применении игольчатого профилометра или гребенчатого шаблона электронного типа. Такой прибор состоит из требуемого количества параллельных друг другу игл, которые могут перемещаться в направлении. Эти иглы соединены с электронными преобразователями, генерирующими электрический сигнал, пропорциональный положению каждой иглы. Эти преобразователи затем подсоединяются к блоку управления 101, средства которого извлекают профиль 109 конкретной исследуемой анатомической области в виде функции электрического сигнала, генерируемого каждым преобразователем. В этом случае, технический работник устанавливает этот профилометр перпендикулярно хребту в упомянутой анатомической области. Затем выполняется передача полученного указанным образом профиля 109 из блока управления 101 в блок обработки Е, средства которого выполняют обработку профиля способом, описание которого дано ниже, с целью определения степени индекса откорма, балльной оценки упитанности, веса и т.д. В этом случае используемое для определения математическое преобразование зависит по меньшей мере от видовых признаков и/или породы и/или пола и/или возраста животного и получается путем сравнения с референтной популяцией, взвешивание которой осуществляется на весах, отвечающих требованиям.
Третий вариант осуществления изобретения заключается в применении гибкого электрического профилометра, устанавливаемого на тело исследуемого объекта. Такого типа профилометр состоит из полосы клейкой ленты или эластичной ленты, в которую интегрированы подходящего типа преобразователи, предназначенные для определения профиля упомянутой анатомической области. Могут использоваться, например, резистивные или пьезоэлектрические преобразователи. Мгновенно собранные данные позволяют выстроить профиль 109. Такого рода данные, непрерывно регистрируемые упомянутым датчиком, описывают изменение по времени профиля упомянутой анатомической области. Профилометрическая лента может применяться техническим работником в качестве постоянной или временной наклейки на туловище исследуемого объекта. Аналогичным образом такого рода лента может применяться на шерсти. Также это устройство может устанавливаться под кожу. Упомянутое устройство может оснащаться RTLS (системой позиционирования в режиме реального времени). Таким образом, процесс центральной обработки в любой момент времени располагает данными относительно идентификации, положения и упитанности каждого находящегося под наблюдением объекта. Наличие сведений о текущем положении позволяет сделать заключение о поведении объектов. В частности, о статусе эструса, зависящего от ряда индикаторов, а именно от увеличения количества перемещений и рефлекса неподвижности. Как это описано ниже, сочетание FI или БОУ со статусом эструса позволяют определить индекс фертильности исследуемых объектов. Упомянутое устройство также может оснащаться бесконтактным датчиком или датчиком давлением, предназначенным для определения статуса эструса по так называемому рефлексу подъема. Действительно, в тот момент, когда, например, корова находится в состоянии эструса у остальных коров стада происходит стимуляция рефлекса покрытия, соответствующего стимуляции женской особью мужского внимания в период размножения. Это является причиной сдавливания хвостовой области находящегося в состоянии эструса объекта, которое может быть выявлено соответствующими датчиками. Для обеспечения более высокой степени точности эта информация добавляется к информации, полученной путем применения системы позиционирования в режиме реального времени (RTLS).
Упомянутое устройство посредством практически непрерывного наблюдения за исследуемым объектом может выявить другие примечательные состояния, такие как мышечные сокращения, вызванные отелом. В области зоотехники, в частности, определение времени появления новорожденного в свою очередь имеет большое значение. Наряду с относительно незначительными изменениями БОУ мышечные сокращения во время отела являются причиной резких изменений профиля 109 согласно распознаваемому шаблону.
Затем выполняется совмещение профиля 109 с информацией, полученной от датчиков, которые могут быть установлены, передача данных посредством блока управления 101 и обработка в блоке обработки Е с использованием описываемой ниже способы с целью определения синтетического индекса откорма, балльной оценки упитанности, живого веса и т.д.
На фигурах 7, 8 и 9 изображен профиль 109, полученный одним из описанных способов. В этих представлениях рассматривается случай, когда исследуемым объектом является крупный рогатый скот, но профиль 109 оказывается аналогичным в случае исследования другой породы.
Ссылаясь на Фигуру 2, на Фигуре 2а обозначены поясничная область L и крестцовый отдел S крупного рогатого скота, на Фигуре 2b - поясничная область L и грудная клетка Р на примере козы, на Фигуре 2с - спинная область тела лошади, на фигурах 2d и 2е - поясничная область L тела на примере кошки и собаки, на Фигуре 2f - брюшные отделы А, бедренная область F, ягодичная область G, поясничная область L, бедренная область F и грудная клетка Р на примере человека.
В средней части М упомянутых анатомических областей образуется кривая, описывающая профиль согласно одному из указанных способов.
Также определяются первая сторона исследуемого объекта 107, обычно называемая правой стороной RS, и вторая сторона, расположенная напротив первой стороны, и обычно называемая левой стороной LS.
На фигурах 7 и 8 в качестве примера изображен типичный профиль 109 поясничной области крупного рогатого скота с левой разверткой 109L на левой стороне LS относительно направления линии хребта S и правой разверткой 109R на правой стороне RS относительно упомянутого хребта S.
Изобретатель провел обширные исследования, которые привели его к определению того, что форма упомянутого профиля 109 позволяет получить значение синтетического индекса откорма FI и, следовательно, балльной оценки упитанности или БОУ, представляющей с высокой степенью приближения упитанность исследуемого объекта, как это показано в разделе ниже.
Способ анализа состоит из следующих этапов: из достаточного количества точек, распределенных равномерно и однородно с обеспечением определенной степени симметрии относительно хребта; (2) извлечение двух синтетических числовых индексов, представляющих левую сторону LS и правую сторону RS этого профиля; (3) получение числового синтетического индекса, определенного здесь как индекс откорма или FI, зависящего от индекса, относящегося к правой стороне, и индекса левой стороны профиля, исследуемого в анатомической области (специальный индекс); (4) в случае, если профиль 109 определялся несколько раз для одной анатомической области, расчет их среднего значения; (5) в случае, если изучению подвергались несколько анатомических областей, определение глобального синтетического индекса путем расчета среднего значения специфических индексов каждой анатомической области; (5) получение балльной оценки упитанности или БОУ, зависящей от индекса откорма FI, посредством применения соответствующей математической формулы корреляции, например, линейного типа.
После определения FI и БОУ с использованием дополнительных характеристик исследуемого объекта, таких как видовые признаки, порода, возраст и пол, способ позволяет определить с высокой степенью приближения вес животного.
Также упомянутый способ позволяет рассчитать дополнительный синтетический индекс, отражающий индекс фертильности и сочетающий в себе FI (или соответствующую БОУ) со статусом эструса исследуемого объекта. Это сочетание реализуется с использованием заданного математического преобразования.
Ниже дано описание, которое следует использовать в качестве примера, но не ограничиваясь им, возможного применения этапов (2) и (3), нацеленных на получение синтетического индекса, отражающего форму профиля 109 конкретной анатомической области исследуемого объекта, характеризующегося безразмерностью и максимально возможной независимостью от положения, навыков оператора, скелетных особенностей исследуемого объекта.
При рассмотрении Фигуры 8, в частности, на фигур 8с и 8b, можно выделить PM точку относительного максимума. Давайте рассмотрим первую прямую линию α и вторую прямую линию β, проходящие через PM и являющиеся касательными к кривой 109.
Пусть P1 будет точкой касания второй прямой линии β и кривой 109, P'1 - точкой касания первой прямой линии α и кривой 109, PB - точкой пересечения прямых линий aB, проходящих через P1 и P'1 и прямую линию S, перпендикулярную ей и проходящую через PM (соответствующую хребту исследуемого объекта), h сегмент  , b1 сегмент
, b1 сегмент  , b'1 сегмент
, b'1 сегмент  .
.
Давайте рассмотрим третью прямую линию γ, параллельную сегменту  , пересекающему прямую линию S в промежуточном положении между PM и PB.
, пересекающему прямую линию S в промежуточном положении между PM и PB.
Пусть P2 и P'2 будут точками пересечения третьей прямой линии γ и кривой 109, h' сегмента  , b2 сегмента
, b2 сегмента  , b'2 сегмента
, b'2 сегмента  .
.
Принимая во внимание фигуру 8d, предположим, что α2 является углом между  и
и  , α1 - углом между
, α1 - углом между  и
и  , α2 - углом между
, α2 - углом между  и
и  , α'1 - углом между сегментами
, α'1 - углом между сегментами  и
и  .
.
Пусть углы β1, β2, β'1 и β'2 являются дополнительными углами наклона соответственно α1, α2, α'1 и α'2 (то есть такие, что  ).
).
Математическое отношение, предлагаемое в рамках настоящего патента, соответствующее синтетическому индексу откорма FI и предназначенное для оценки упитанности, являющейся функцией этих угловых величин:

Определяя левую сторону LS и правую сторону RS относительно хребта S, представляется возможным выполнить расчет R только для левой стороны (RL) и R только для правой стороны (RR), затем определив R как среднее значение RL и RR, например, в качестве среднего арифметического:

В соответствии с другим вариантом осуществления изобретения, можно рассчитать среднее значение угловых величин на левой и правой сторонах, а затем вычислить R в качестве функции среднего значения угловых величин по формуле:

где  и
и  - средние значения соответствующих левой LS и правой RS угловых величин профиля 109 относительно хребта S, рассчитанные, например, по формуле расчета среднего арифметического:
- средние значения соответствующих левой LS и правой RS угловых величин профиля 109 относительно хребта S, рассчитанные, например, по формуле расчета среднего арифметического:
Индекс R не измеряет каким бы то ни было математическим образом выпуклость, вопреки допущениям двух приоритетных документов настоящей заявки.
Предпочтительной формой осуществления (1), (1а), (1b) и (2) является функция отношения упомянутых углов и средних значений угловых величин:


где ϕ - универсальное угловое смещение, такое что ϕ∈[-π, π].
Предпочтительной формой осуществления (1с) и (2а) является функция отношения упомянутых средних значений угловых величин согласно следующей формуле:

например, реализуемой как:

где коэффициенты ki являются постоянными, n - это натуральное число, причем n≥1,  - это i-я степень отношения средних значений угловых величин, выходящих за пределы фазы по ϕ. Особый случай (1d) при n=1:
- это i-я степень отношения средних значений угловых величин, выходящих за пределы фазы по ϕ. Особый случай (1d) при n=1:

Частный случай (1d'), характеризующийся тем, что  , k0=0, k1=1. В этом случае R является функцией отношения угловых величин дополнительно
, k0=0, k1=1. В этом случае R является функцией отношения угловых величин дополнительно  (угловые величины β1 и β2, указанные на Фигуре 8d):
(угловые величины β1 и β2, указанные на Фигуре 8d):
По аналогии (2а) может быть реализован следующим образом:

с
где коэффициенты ki являются постоянными, n≥1 и ϕ - фазовое смещение. Особый случай (2b) при n=1 и  :
:
Дополнительная форма осуществления (1) основана на отношении тангенсов этих угловых величин:

или рассматривая отдельно левую сторону LS и правую сторону RS:

Дополнительная форма осуществления (1) основана на зависимости среднего значения тангенсов этих угловых значений:

где эти средние значения могут рассчитываться, например, по формуле расчет среднего арифметического:

Эти формулы представляют собой средние значения тангенсов для правой стороны RS и левой стороны LS профиля 109 относительно хребта S.
Предпочтительной формой осуществления (1е) является:

где коэффициенты ki являются постоянными, n - натуральное число, причем n≥1,  - i-я степень отношения упомянутых средних значений тангенсов.
- i-я степень отношения упомянутых средних значений тангенсов.
Руководствуясь соображениями упрощения в качестве примера в случае n=1, k0=0, k1=1, ϕ=0, R может быть рассчитан согласно (1е''') как:

Точно также компоненты могут быть получены только для правой стороны RS и левой стороны LS:

из которой:

Индекс R представляет собой новый синтетический индекс оценки упитанности, определяемый в рамках настоящего документа как индекс откорма или FI.
Частным случаем является мышечная и скелетная симметрия исследуемого объекта 107 относительно линии хребта. В этом случае справедливо:

Особым случаем является ситуация, в которой профиль 109 предоставляется в неполном объеме. Это может произойти в том случае, например, когда изображение, снимаемое камерой 102 покрыто частично или в случае, если определена только часть профиля изучаемой анатомической области. Это может произойти при изучении продуктивных животных, например, на скотобойне после того, как животное было забито (после его смерти). В этом случае в конце линии забоя непосредственно перед помещением на хранение в подвешенном состоянии туша животного делится на две части и классифицируется согласно стандартной процедуре. В Европе, например, используется классификационная система SEUROP, согласно которой крупному рогатому скоту присваиваются категории по мышечной конституции и наличию жировых прослоек. Форма обозначается буквами S, Е, U, R, О, P, обозначающими развитие мышечной массы; S соответствует особенному и очень выпуклому профилю, обеспечивающему высокие количественные и качественные показатели выхода при забое; P соответствует низкому с прямыми профилями, обуславливающими низкие количественные и качественные показатели выхода при забое.
В этом контексте применение способы, описание которой дано в настоящем документе, дает ряд преимуществ, в котором в частном случае рассматривается только половина кривой, представленной на Фигуре 8. Такое условие охватывается частным случаем (1g), в котором две половинные кривые являются равными и симметричными относительно линии хребта.
Главным образом в этом случае речь идет только об одной боковой развертке профиля 109 и дополнении этой кривой расчетом развертки на другой стороне, являющейся отражением первой относительно линии хребта. Остальные этапы процесса являются идентичными за исключением упрощения формул по причине симметрии.
Это позволяет применять способ для многократного расчета индекса R одной и той же анатомической области и/или нескольких анатомических областей одного и того же животного. В этом случае суммарный индекс является, например, средним значением индексов R каждого отдельного измерения и рассчитывается по формуле среднего арифметического:
где n - это количество измерений, выполненных на одном животном, и Ri значение индекса откорма для i-го измерения.
Индекс откорма, рассчитанный по формулам (1d), (1е), (1f), (2b), (2с), представляет собой превосходный индикатор состояния откорма согласно тому, что уже обсуждалось ранее, независимо от видовых признаков, породы, пола, возраста и абсолютного размера исследуемого объекта.
Однако, для получающихся окончательных численных значений не применимы шкалы, как правило используемые на практике техническими специалистами по оценке.
Как это изображено на Фигуре 3 и согласно, тому, что уже было описано выше, индекс под названием «балльная оценка упитанности», как правило, используется на международном уровне и животному присваивается оценка от 1 до 5 (в ряде стран применяются отличающиеся шкалы, так во Франции БОУ определяется по шкале от 0 до 5 или от 1 до 9, при этом в любом случае эти шкалы взаимосвязаны линейным преобразованием).
Для расчета балльной оценки исходя из R следует применить функцию преобразования:

где R - индекс откорма, S - видовые признаки, В - род, М - пол и Е - возраст исследуемого объекта.
Установив S, В и М, в рамках рассмотрения конкретной возрастной группы функция ψ(R, S, B, M, E) может быть рассчитана следующим образом (также и для других балльных оценок, таких как первичный индекс массы тела):

с n≥1 порядком функции ψ. Параметры ki представляют собой коэффициенты, зависящие от видовых признаков, породы, пола, возрастной группы и определяемые эмпирическим путем на основании данных, полученных при изучении группы референтных объектов, БОУ которых определялась техническими экспертами.
Описанный способ зарекомендовала себя как особенно эффективная применительно к определению БОУ молочного скота голштинской породы. Проведенные испытания показывают, что формула (7) должна применяться с высокой степенью приближения с теми же самыми параметрами ki к крупному рогатому скоту голштинской породы независимо от возраста, периода лактации и количества отелов (отелившаяся один раз или многократно отелившаяся телка).
Что касается человека, наиболее широкое распространение получил синтетический индекс под названием индекс массы тела или ИМТ, рассчитываемый по следующей формуле:
в которой m - вес исследуемого объекта, выраженный в кг, h2 - рост объекта в квадрате.
Усовершенствованная версия ИМТ определяется как первичный ИМТ, соответствующий отношению ИМТ исследуемого объекта к верхнему значению ИМТ референтной популяции.
Поскольку первичный ИМТ представляет собой отношение двух различных значений ИМТ, величина первичного ИМТ является безразмерной. Объекты, значение первичного ИМТ которых менее 0,74 имеют недостаточную массу тела; объекты с ИМТ от 0,74 до 1,00 имеют нормальный вес; объекты, ИМТ которых превышает 1,00 характеризуются избыточной массой тела. Первичный ИМТ представляет интерес с клинической точки зрения, так как он выражает синтетическим способом выраженное в процентах отклонение массы тела исследуемого объекта от верхнего предельного значения. Например, человек, ИМТ которого равен 34, характеризуется величиной первичного ИМТ=1,36 (отношение к верхнему предельному значению, равному 25), то есть его/ее вес превышает максимально допустимый на 36%.
Для населения, проживающего в регионах Южной Азии и Китая, первичный ИМТ получается путем деления на 23, а не на 25 (типовое значение для населения Западного полушария).
Первичный ИМТ (BMIp) коррелирует с индексом R согласно функции типа:

где С - это группа этнической принадлежности, М - пол и Е - возраст исследуемого объекта.
Установив С, М и Е, имеем следующее:
где zi - коэффициенты, определяемые экспериментальным путем, Ri - i-я степень индекса R, n - порядок выражения.
В дополнение к БОУ и ИМТ существует ряд других индексов, таких как индекс формы тела по поверхности (SBSI), в той или иной степени связанные математическим преобразованием с индексом откорма R.
Отличительной особенностью упомянутого индекса R является высокая степень независимости от высоты h профиля 109.
Это подразумевает значительную независимость R от изменения положения инструмента регистрации 102 или скелетных вариаций отдельных представителей, характеризующихся одинаковой упитанностью.
Например, при отличии угла наклона камеры 102 относительно исследуемого объекта 107, профиль 109 в реальной области определения будет равным, при обозначении кривой, области определения изображения, характеризующегося большей или меньшей степенью плоскостности.
Для того, чтобы проиллюстрировать эту характеристику, давайте рассмотрим Фигуру 8е. Рассмотрим ситуацию, когда технический эксперт выполняет два измерения, например, осуществляя съемку двух изображений, отличие которых состоит в незначительном изменении положения камеры. Это определяет изменение перспективы и, следовательно, изменение формы профиля 109 в области определения изображения. На Фигуре 8е две кривые представлены схематично, так как они получены в результате съемки под разными углами наклона устройства.
В этом примере следует отметить, что высота h кривой изменяется на 25%. Можно легко заметить, что отношение тангенсов изменения не претерпевает, а отношение угловых величин изменяется незначительно. И напротив, такие измерения, как площадь под кривой, изменяются в значительной степени.
Ниже приведен ряд экспериментальных данных, иллюстрирующих и подтверждающих сказанное выше, со ссылкой на кривые, изображенные на Фигуре 8е.
Рассмотрим профиль 109, составленный с применением двух различных углов обзора с использованием сканирующей триангуляционной системы. То же самое состояние наблюдается, например, для двух представителей крупного рогатого скота, характеризующихся одинаковой степенью упитанности и исследуемых с применением одного и того же инструмента, устанавливаемого под одним и тем же углом наклона, но имеющих отличия скелетного строения, в частности один из двух объектов обладает значительно выступающим хребтом. При таких условиях профиль 109 в области распределения изображения будет претерпевать деформацию, как это показано на Фигуре 8е. Например, рассмотрим прямую линию γ, для которой справедливо равенство 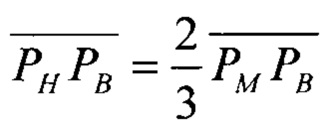 .
.
Первое изображение характеризуется следующими равенствами:
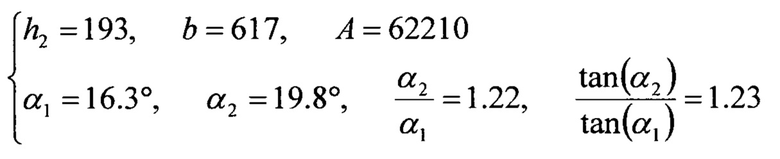
Второе изображение характеризуется следующими равенствами:
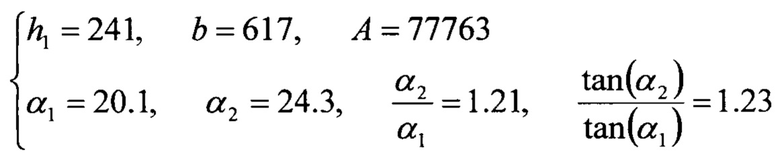
Как видно, изменение высоты кривой на 25% влечет за собой изменение на 20% площади поверхности под кривой, при этом изменение отношения угловых величин в обоих случаях составляет менее 1%, а отношение тангенсов не изменяется. Поскольку согласно предлагаемой способу синтетический индекс откорма R и, следовательно, БОУ определяется как функция отношения этих угловых величин, то можно утверждать, что FI и БОУ характеризуются достаточной нечувствительностью к изменениям положения регистрирующего устройства 102 относительно положения, определенного как идеальное.
Тот факт, что деформация аналогична тому, что изображено на Фигуре 8е, может быть также обусловлен более высокой или более низкой степенью выступания хребта, которую необходимо учитывать. Действительно, две кривые, изображенные на Фигуре 8е, могут соответствовать двум разным животным, характеризующимся различными скелетными строениями, но имеющими одинаковую балльную оценку упитанности (БОУ). Очевидно, что форма хребта оказывает незначительное влияние на индекс жирности и, следовательно, на БОУ, так как форма хребта не несет информации о жировых запасах, накопленных исследуемым объектом.
Эта особенность предлагаемого способа является значительным его отличием от множества других способов известного уровня техники, определяющих абсолютные размеры исследуемого объекта (с последующей их обработкой, заключающейся, например, в расчете площади поверхности или объема под кривой), получаемые, например, путем применения трехмерного сканирования.
Благодаря этой особенности и тому факту, что предлагаемая способ не зависит от действительного размера плоского профиля 109, упомянутый способ применим для более широкого диапазона устройств по сравнению со способами, основанными на использовании трехмерных камер (например, времяпролетных камер), таких как смартфоны и другие устройства с одной камерой низкого разрешения.
Дополнительная особенность способа в соответствии с изобретением заключается в режиме определения точек P1 и P'1 в качестве точек касания к профилю 109 исследуемого объекта 107.
Рассмотрим, например, извлечение из записанного изображения с применением процедуры обработки цифрового изображения пикселей, принадлежащих кривой 109.
Рассмотрим количество N пикселей и обозначим Pi i-й пиксель кривой 109, а PM - точку максимума кривой. Со ссылкой на Фигуру 9, рассмотрим прямую линию, проходящую через PM и Pi и описываемую уравнением:

где:
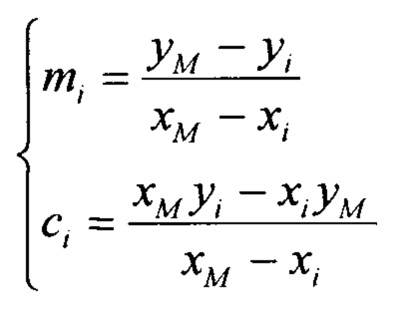
На Фигуре 9 представлена диаграмма алгоритма определения точки касания кривой, основанного на итерационном сравнении значения, которое прямая линия (9) принимает в точке абсциссы, xi+1 и ординатой yi+1 точки Pi+1.
Точка касания PT идентифицируется при проверке следующего условия:

Значение этого условия с легкостью выводится из Фигуры 9.
Идентификация двух точек касания кривой, обозначенных на Фигуре 7 Pi и P'i, позволяет эффективно применять формулу для расчета синтетического индекса откорма R и, следовательно, (6) для расчета БОУ также в том случае, когда исследуемый объект характеризуется асимметричной конституцией (например, крупный рогатый скот). Если рассматривать крупный рогатый скот, то нужно учитывать незначительную степень асимметрии внутреннего распределения органов между правой и левой сторонами. Также зачастую животное стоит таким образом, что одна его нога выдвинута вперед больше относительно другой ноги. Это означает, что профиль 109R расположен под углом наклона по отношению к профилю 109L, а также характеризуется деформацией.
Описанная способ определения точек касания Pi и P'i позволяет устранить эту проблему.
Способ также обладает рядом преимуществ, позволяющих снизить влияние угла наклона измерительного устройства по отношении к хребту на результат измерения. Интерфейс пользователя может оснащаться датчиком уровня, который в режиме реального времени указывает правильное позиционирование инструмента, что облегчает процесс позиционирования инструмента, осуществляемый техническим работником 108.
С использованием алгоритма индивидуализации точек касания, описание которого дано выше, выполняется уменьшение набора действительно значимых точек кривой, так как убирается хвост профиля 109 (кривая пересечения гипотетической плоскости и конкретной изучаемой анатомической области объекта 107).
Поскольку и FI и БОУ представляют собой синтетические индексы жировых запасов исследуемого объекта, представляется возможным использовать значение БОУ, полученное путем расчета по формуле (6), или значение FI, полученное путем расчета по формулам (1d), (1е) и (1f), в качестве независимой переменной в уравнении регрессии наряду с породой, возрастом и полом исследуемого объекта, чтобы с высокой степенью приближения определить живой вес.
Это можно сделать посредством применения полиномиальной регрессии, взяв за основу эталонную группу объектов, видовые признаки, порода, пол, возраст и вес которых известны.
Таким образом, после установления видовых признаков, породы и пола вес оказывается функцией возраста Е и БОУ В:

Пример такого рода зависимости выражается полиномиальной регрессией, которая имеет следующий вид:

где первая формула выражает вес Pm особи мужского пола, возраст которой равен Б, а БОУ=В.
Вторая формула выражает вес Pƒ особи женского пола, возраст которой равен Е, а БОУ=В.
Очевидно, что формулы (11) предназначены конкретно для группы с определенными видовыми признаками, определенной породы и возраста.
Если речь идет о продуктивных животных, то породы, получаемые путем скрещивания, должны рассматриваться как порода в чистом виде.
Способ определения параметров mi и ni регрессии описан в литературе и основан на использовании значений веса, БОУ, возраста, пола, породы и видовых признаков группы эталонных объектов.
Если речь идет о продуктивных животных, таких как молочные коровы, предложенный способ определения FI, БОУ и живого веса может быть эффективно объединен с определением эструса, чтобы установить новый индекс фертильности, определяемый в рамках настоящего документа как индекс фертильности F.
В условиях интенсивного производства действительно оплодотворение практически всегда осуществляется искусственным способом (искусственное осеменение или FA). Поскольку, как известно, функция производства молока у крупного рогатого скота напрямую связана с отелом, причем кривая молочной продуктивности достигает своего максимума в первые месяцы после отела с последующим снижением удоя, период отела должен быть сведен к минимуму, чтобы добиться максимальной продуктивной эффективности.
Однако, длительность периода фертильности коровы длится всего несколько часов, поэтому важно точно определить время эструса для проведения ассистированной репродукции в момент максимальной вероятности оплодотворения.
Однако, шансы на успешное оплодотворение зависят не только от статуса эструса объекта, но также и от его физического состояния. На самом деле, объект в плохом физическом состоянии имеет мало шансов на оплодотворение. В специальной литературе дано описание многочисленных исследований, демонстрирующих наличие связи между вариациями БОУ и фертильностью, например, молочных коров. Подводя итог, следует отметить, что известно о существовании механизма защиты организма, который препятствует оплодотворению и зарождению новой жизни, если организм пребывает в ненадлежащем физическом состоянии. Вероятно, это связано с тем, что в природе ненадлежащее физическое состояние, такое как излишняя худоба (БОУ между 1 и 2 по шкале от 1 до 5), обусловлен нехваткой продовольственных ресурсов в окружающей среде, следствием чего является чрезвычайно низкая вероятность успешного вынашивания потомства и выживания этого потомства в окружающей среде.
При интенсивном способе производства молока нередко можно увидеть в стаде очень худое или очень тучное животное или по меньшей мере одно животное, степень упитанности которого ниже или выше оптимального значения. Это обусловлено множеством факторов, посредством анализа которых отличают хорошую породу от плохой, но в любом случае по причине того, что корова, выращиваемая для интенсивного производства молока, была генетически выведена для ежедневного производства огромного количества молока пропорционально весу тела. Это подразумевает чрезвычайную необеспеченность энергетического баланса крупного рогатого скота, который необходимо поддерживать с учетом стадии лактации животного с тем, чтобы энергетический баланс был максимально уравновешен. Однако, неблагоприятное соотношение затрат на откорм и продажной цены молока может стать причиной экономической неэффективности содержания и разведения домашнего скота. Поэтому скотовод находится в состоянии постоянного поиска правильного баланса между качеством и количеством корма, состоянием здоровья скота и молочной продуктивностью, зачастую принимая решение принять некоторую степень неэффективности процесса. В данном контексте значительный экономический вес имеет стоимость дозы спермы для искусственного осеменения.
Подводя итого, следует отметить, что в неустойчивом экономическом равновесии ферм по производству молока нарушение процесса осеменения означает потерю стоимости семени (часто очень дорогостоящего) и месячную задержку начала молочной продуктивности этого объекта.
В свете представленной выше информации для обеспечения максимальной вероятности оплодотворения необходимо наблюдать как за статусом эструса, так и за упитанностью (БОУ или FI) молочного скота.
Существует ряд способов известного уровня техники, предназначенных для определения эструса молочного скота, которые могут эффективно сочетаться с заявленным изобретением для расчета FI и БОУ. Эти решения используют черты поведения или биологические характеристики, связанные со статусом эструса. Приведем несколько примеров: шагомеры и электронные ошейники, определяющие увеличение подвижности объекта; так называемое «окрашивание хвоста» или его электронная версия, посредством которого выявляется рефлекс подъема, возникающий у других коров стада, если одна из коров находится в состоянии эструса; химический анализ молока, целью которого является выявление в молоке особых химических соединений, наличие которых обусловлено эструсом.
В данном контексте для объекта, находящегося в состоянии эструса, индекс фертильности F определяется в виде процентной разницы между значением реальной БОУr и значением идеального БОУi объекта с учетом периода лактации по следующей формуле:

где Е представляет собой статус эструса (Е=0 отсутствие эструса, Е=1 объект находится в состоянии эструса), с учетом шкалы БОУ [1; 5], БОУi обычно изменяется в интервале [2,5; 3,5].
Согласно (12) индекс фертильности F может принимать следующие числовые и смысловые значения:
1. F=0 означает отсутствие эструса независимо от упитанности;
2.  означает состояние эструса в сочетании с оптимальной упитанностью (
означает состояние эструса в сочетании с оптимальной упитанностью ( );
);
3. F>1 означает состояние эструса в «перекормленности»;
4. 0<F<1 означает состояние эструса в «недокормленности».
Если F имеет значения в районе 1, значит вероятность успешного осеменения является максимальной.
На Фигуре 1 изображен график известного уровня техники, на котором временная шкала совпадает с осью абсцисс, при этом нулевая точка соответствует дате последнего отела, пунктирная линия 102 представляет собой изменение идеального БОУ (БОУi), а сплошная линия 101 отражает изменение молочной продуктивности.
Вторая конфигурация аппарата D, являющегося предметом изобретения, может использоваться для создания стационарных установок автоматического типа. В предпочтительном варианте осуществления изобретения, аппарат D должен устанавливаться на верхнюю часть этих ограниченных условий окружающей среды, когда в течение короткого периода времени животное располагается близко по функциональным причинам, таким как взвешивание, ветеринарный осмотр и/или введение лекарственных препаратов, доение. В частности, аппарат D может использоваться для автоматического измерения БОУ в периметре бокса для содержания и/или бокса для взвешивания, во время доения коровы с использованием доильного робота, в периметре доильных залов.
В качестве примера такой второй конфигурации рассмотрим Фигуру 11, причем установка аппарата D внутри бокса для взвешивания В животного изображена схематично. Эта методология применима и в других условиях, когда объект 107 зафиксирован в известном положении. Это позволит расположить блок управления 101 таким образом, чтобы наилучшим способом выделить анатомическую область (например, поясничный отдел) исследуемого объекта 107, профиль 109 которой подчеркнут с применением одного из описанных выше способов. Команда на съемку изображения или нескольких изображений может быть передана вручную техническим работником, посредством удаленного управления, играющего роль кнопки 106. В соответствии с другим вариантом осуществления изобретения, если бокс оснащен передними и/или задними воротами, могут использоваться концевые выключатели, позволяющие блоку управления установить момент действительного нахождения животного в боксе. В предпочтительном варианте осуществления изобретения, с этой целью могут также эффективно применяться датчики присутствия других типов, например, инфракрасные, микроволновые, ультразвуковые датчики, устройства для считывания радиочастотной идентификации (RFID), применяемые, если животное экипируется преобразователями для электронной идентификации. С этой же целью в блок управления может устанавливаться приложение для обнаружения движения, позволяющее выявить наличие животного, автоматически определив оптимальное время для съемки изображения.
Аналогичным образом идентификация животного может выполняться вручную экспертом с использованием удаленного терминала, связанного по радиочастотному каналу с блоком управления 101. В соответствии с другим вариантом осуществления изобретения, с целью автоматизации процесса возможно обеспечение взаимодействия блока управления 101 с устройством считывания радиочастотной идентификации, обозначенным на Фигуре буквой R. Дополнительная возможная альтернатива, применяемая к животным пегой масти или животным, на спину который нанесена маркировка, состоит в использовании программного приложения для автоматического распознавания такого рода пятен и/или маркировки камерой 102, что необходимо для однозначной идентификации объекта 107.
В этой второй конфигурации аппарат D может подключаться к другим представленным здесь измерительным инструментам, таким как терминал Т для взвешивания, что обеспечивает одновременную регистрацию данных о весе животного 107, счетчик молока, если речь идет о доильных роботах, система определения эструса, другие удаленные терминалы, предназначенные для регистрации, осуществляемой ветеринарами и/или техническими работниками, ввода лекарственных препаратов и/или профилактических мероприятий и/или иных видов необходимых исследований или сведений.
В тех же блоках управления и обработки данных предлагаемой в рамках настоящего документа системы может быть эффективно реализован алгоритм распознавания эструса исследуемого объекта, основой которого является способ окрашивания хвоста животного. Как известно, способ заключается в нанесении на хвост коровы соответствующей люминесцентной краски. При наступлении эструса у особи у других коров стада срабатывает рефлекс покрытия, который становится причиной истирания шерсти хвостового отдела. При таком истирании происходит частичное или полное удаление ранее нанесенной краски. Это изменение выявляется посредством того же видеозаписывающего аппарата 102, используемого для определения профиля 109.
Как показано на Фигуре 12, вторая конфигурация аппарата D может устанавливаться во вращающейся доильной установке. Это означает, как это уже было проиллюстрировано Фигурой 11, что упомянутый блок управления 101 и упомянутая камера 102 (например, встроенная в блок управления 101) располагаются на опоре, устанавливаемой сверху по отношению к исследуемому объекту 107, на котором по меньшей мере одним из описанных выше способов выделен профиль 109.
При использовании такого типа доильной установки животные запускаются на своего рода карусель, так что, прикрепив аппарат D к потолку, как это показано на Фигуре 12, мы обеспечим прохождение всех животных через этот аппарат до схода с карусели, причем положение животного будет известно. Автоматическое пусковое устройство (например, фотоэлектрический выключатель, механический выключатель, бесконтактный датчик) выполняет функцию кнопки 106, изображенной на фигурах 6а и 6b, передавая блоку управления 101 информацию об оптимальном времени съемки изображения камерой 102. Также в этом случае применимы все решения по идентификации животного и решения по взаимодействию с другими системами и техническим работником, проиллюстрированные на примере бокса для взвешивания (первая конфигурация).
Третья конфигурация аппарата D может использоваться при создании подвижных систем автоматического типа. Действительно, аппарат D может устанавливаться на направляющую, управляющую автоматическим перемещением в периметре доильной установки. Эта конфигурация применима к помещениям любой формы (например, елочного типа или с параллельным размещением животных).
В качестве примера такого третьей конфигурации аппарата D, рассмотрим фигуру 13, на которой аппарат D, являющийся предметом изобретения, установлен в доильной установке елочного типа. В этом помещении в процессе доения животные зафиксированы в известном положении. В данном контексте блок управления 101 вместе с упомянутой камерой 102 подвешивается на воздушную линию 110. В этой конфигурации аппарат D перемещается по направляющей 110, причем приведение в действие обеспечивается двигателем 111 и соответствующими трансмиссионными элементами (например, ремнем, цепью, винтом), и получает команду на выполнение съемки от автоматического пускового устройства (например, фотоэлектрического датчика, механического выключателя, бесконтактного датчика), выполняющего функцию кнопки 106, изображенной на фигурах 6а и 6b, передавая блоку управления 101 информацию об оптимальном времени выполнения съемки объекта в процессе перемещения по направляющей. Пусковые устройства должны устанавливаться в соответствии с каждым животным. Скорость срабатывания затвора камеры 102 и осветительная система освещения должны соответствовать скорости, с которой планируется перемещать устройство D, таким образом получаемые изображения будут четкими и с правильной экспозицией. Аналогичное решение применимо и к другим типам доильных залов (например, «параллельного» типа). Также в этой третьей конфигурации могут успешно применяться любые решения по идентификации животных и решения по сопряжению с другими системами и техническим работником, описание которых уже было дано выше для других вариантов конфигурации.
На Фигуре 17 представлена четвертая конфигурация, предполагающая создание специального прогона, по которому проходят животные. С использованием соответствующих бесконтактных датчиков, тип которых указан в описании других вариантов конфигурации, и/или применимых электронных систем идентификации животных, тип которых также указан в описании других вариантов конфигурации, представляется возможным определить действительное положение животного, пересекающего проход. Таким образом, является возможным определить оптимальное время съемки с использованием фотоаппарата требуемой анатомической области изучаемого объекта, которая была выделена на профиле 109 в плоскости, перпендикулярной хребту животного, с применением одного из описанных выше способов, как это изображен на Фигуре 17.
Даже в этой четвертой конфигурации могут успешно применяться любые решения по идентификации животных и решения по сопряжению с другими системами и техническим работником, описание которых уже было дано выше для других вариантов конфигурации.
На Фигуре 21 представлена пятая возможная конфигурация, заключающаяся в установке соответствующей камеры с высоким разрешением 102 над стойлом 107 для ведения видеорегистрации (с заданным временным показателем) животных, на теле которых профиль 109 выделен одним из описанных выше способов.
Способ и аппарат D, описание которых дано выше, могут также использоваться для определения БОУ мертвого животного (например, на конечном этапе линии забоя) с целью присвоения туше классификации и в любом случае туши, разделанной на части.
На фигурах 14, 15 и 16 представлены блок-схемы процесса сбора данных, управления ими, их предварительной и окончательной обработки как для ручного варианта осуществления изобретения, так и для автоматического.
на Фигуру 14, на которой изображена блок-схема портативного инструмента, которым управляет технический работник, согласно первой конфигурации аппарата D. Перед тем, как приступить к измерению БОУ, технический работник 108 выполняет этап 1, состоящий в идентификации исследуемого объекта 107 посредством ручной регистрации новых персональных данных в блоке обработки данных Е или посредством ручного выбора объекта из базы данных, содержащейся в упомянутом блоке обработки данных Е. Существуют способы ускорения этого процесса, такие как внедрение речевого интерфейса в блок управления 101 с использованием решений известного уровня техники, например, автоматического распознавания речи (ASR) и преобразования текста в речь (TTS). Таким образом, технический работник идентифицирует животное, проговаривая последние цифры идентификационного клейма или цифры регистрационного номера компании, которому принадлежит животное, или же просто произнося кличку животного. Очевидно, что эти данные должны быть занесены во встроенную базу данных блока управления 101, средства которого, сразу же после расшифровки речевого управления, обеспечивают подтверждение путем преобразования текста в речь (TTS).
Автоматизация процесса идентификации достигается за счет использования устройств электронной идентификации, таких как устанавливаемые подкожно преобразователи, электронные ушные бирки, эндолюминальные электронные шарики, электронные шагомеры, электронные ошейники и т.д. Действительно, если изучаемое животное 107 экипируется одной из таких электронных радиочастотных идентификационных бирок, технический специалист 108 имеет возможность идентифицировать животное посредством портативного устройства для считывания радиочастотной идентификации, например, подсоединенного с использованием соответствующего провода или через протоколы беспроводной связи bluetooth или Wi-Fi с блоком управления 101 или встроенного в упомянутый блок управления 101.
Таким образом, этап F1 идентификации будет выполняться легко и быстро.
В этот момент технический работник 108 нажимает на кнопку 106. Сразу же после получения подтверждения о нажатии кнопки процесс F2 приступает к выполнению этапа F3 проверки наличия генератора лазерного луча. При наличии в системе генератора лазерного луча выполняется этап F4, заключающийся в зажигании упомянутого генератора лазерного луча. Технический работник при помощи проекции лазерной плоскости, четко различимой на спине животного, приступает к выполнению этапа F5, состоящего в оптимальном позиционировании аппарата D относительно исследуемого объекта 107, что необходимо для регистрации морфологического характера, используемого для определения FI и БОУ (например, профиля поясничного отдела). После того, как технический работник определил оптимальное положение аппарата D, ему/ей следует снова нажать на кнопку 106. Это действие определяется процессом F6, который приступает к реализации этапа F7, заключающегося в съемке изображения и отключении лазера.
Если система не содержит генератора лазерного луча, например, в тех случаях, когда профиль 109 выделен с использованием одного из описанных выше способов, техническому работнику 108 следует просто один раз нажать на кнопку 106. Это действие обеспечивает выполнение этапа съемки F7.
Если технический работник считает, что необходимо сделать несколько снимков одного и того же объекта, то процесс возобновляется, начиная с этапа F2, если же необходимо идентифицировать новое животное, то процесс возвращается к этапу F1.
Если используется портативный инструмент согласно первой конфигурации, технический работник 108 подходит к объекту 107 спереди или сзади и позиционирует аппарат D таким образом, чтобы зарегистрировать профиль 109, выделенный на теле животного одним из описанных выше способов. Особенно эффективным является вариант, когда технический работник 108 подходит к исследуемому объекту 107 спереди, возможно, когда животное ест, так как в этом положении упомянутый эксперт 108 может выполнить измерение с максимальной безопасностью, находясь в «чистой зоне» стойла за пределами бокса для содержания животных.
Аппарат D представляется надежным в плане субъективности технического работника при позиционировании аппарата по высоте и углу наклона относительно исследуемого объекта 107.
Перейдем к Фигуре 15, на которой изображена блок-схема работы стационарно установленного аппарата в автоматическом режиме, соответствующего второй и третьей конфигурации аппарата D.
Этап F2 состоит в процессе обнаружения нового объекта 107 посредством по меньшей мере одного из датчиков, характеристика которых дана в описании первой и второй конфигураций.
Согласно второй конфигурации аппарат D установлен стационарно, при этом животное 107 перемещается в точку измерения, третья конфигурация подразумевает, что животное занимает определенное неподвижное положение, а аппарат D перемещается в оптимальное измерительное положение, четвертая конфигурация предполагает свободное прохождение животного по прогону, тогда как пятая конфигурация подразумевает свободное перемещение животных в пределах зоны, контролируемой системой.
Во всех пяти конфигурациях выявление присутствия нового животного выполняется вручную экспертом средствами удаленного управления, играющими роль кнопки 106, или автоматически средствами соответствующего аппаратного обеспечения или программными датчиками. Например, если в боксе для содержания коров имеются передние и/или задние ворота, то могут использоваться концевые выключатели, посредством получения информации от которых блок управления 101 определяет момент, в который животное действительно находится в положении измерения. С этой целью могут также эффективно применяться датчики присутствия других типов, например, инфракрасные, микроволновые, ультразвуковые датчики, устройства для считывания радиочастотной идентификации (RFID), применяемые, если животное экипируется преобразователями для электронной идентификации. С этой же целью блок управления может оснащаться приложением, отвечающим за обнаружение движения, применяя которое является возможным определить присутствие, положение, ориентацию и направление движения животного, автоматически установив оптимальное время для съемки изображения.
Выявив присутствие нового объекта в измерительном положении, система приступает к выполнению этапа F1 по идентификации объекта. Процесс идентификации может выполняться после других этапов анализа или одновременно с ними или же быть абсолютно не привязанным к другим этапам. В обоих случаях средствам блока управления 101 необходимы результаты процесса идентификации.
Процесс идентификации осуществляется с использованием различных способов известного уровня техники: вручную техническим работником посредством удаленного терминала, подключаемого к блоку управления 101 при помощи кабеля или с использованием беспроводных средств связи. В соответствии с другим вариантом осуществления изобретения, с целью автоматизации процесса блок управления 101 может взаимодействовать напрямую с устройством для считывания радиочастотной идентификации, если животное экипировано электронным идентификатором. Дополнительная возможная альтернатива, применяемая к животным пегой масти, или животным, на спину которых нанесена маркировка, состоит в использовании программного приложения для автоматического распознавания такого рода пятен и/или маркировки для однозначной идентификации животного.
После того, как объект был обнаружен и идентифицирован, если установлен генератор лазерного луча (этап F3), то система выполняет включение упомянутого генератора лазерного луча (этап F4) и захват по меньшей мере одного профиля (этап F7).
После завершения указанной последовательности система возвращается к процессу обнаружения присутствия объекта на этапе F2.
Процесс обработки данных может выполняться и без идентификации животных, если представляет интерес расчет среднего значения индекса FI и/или среднего значения БОУ группы животных.
На Фигуре 16 изображена блок-схема процессов предварительной и окончательной обработки данных.
В предпочтительном варианте осуществления изобретения, предварительная обработка данных выполняется средствами блока управления 101, который в случае доступности нового профиля (этап S1) выполняет шифрование всех данных (например, данных о животном, данных, полученных отдатчиков, данных, полученных от других подсоединенных измерительных систем, данных, введенных техническим работником, снятой фотографии или нескольких фотографий), их кодирование в рамках одиночного сжатого пакета с использованием способов известного уровня техники (например, с использованием технологии цифровых водяных знаков) и передачу удаленному блоку обработки данных или обработку посредством локального процесса (этап S2).
В предпочтительном варианте осуществления изобретения, переработка данных выполняется средствами центрального удаленного блока (процессора), такие характеристики которого, как вычислительная мощность, объем памяти, степень резервирования, бесперебойность функционирования, восстановление после отказа и т.д., отвечают требованиям, предъявляемым к скорости обработки данных и их безопасности.
Этот процесс находится в режиме постоянного ожидания новых данных, подлежащих обработке (этап Е1). В момент получения блоком управления 101 нового пакета центральная система (содержащая по меньшей мере один процессор) выполняет его обработку (этап Е2) в соответствии со следующими этапами:
- извлечение, восстановление и расшифровка сжатых данных, содержащихся внутри полученного пакета,
- проверка целостности данных,
- применение процесса, представленного на Фигуре 10, или другого аналогичного процесса определения точек касания кривой 109,
- применение по меньшей мере одной из формул (1d), (1е), (1f), (1g) для расчета индекса FI,
- применение формулы (8) для определения БОУ конкретной породы,
- применение формулы (11) для определения веса,
- применение формулы (12) для определения фертильности,
- сохранение информации в соответствующих таблицах центральной базы данных.
После завершения обработки данные становятся доступными для пользователя (этап Е3) (например, передаются устройству D и/или передаются в другие базы данных и/или публикуются на веб-странице).
Область нижней части спины L, брюшной отдел А, крестцовый отдел S, бедренная область F, грудная клетка P, ягодичная область G и область спины D в зависимости от видовых признаков имеют особенно важное значение для определения БОУ в середине каждой области, так как именно в этих отделах жировые прослойки формируются в случае большого накопления жиров и быстрее расходуются, когда возникает такая необходимость. Наилучшим образом индекс FI оценивается с использованием формул (1d), (1е) и (1f), тогда как БОУ рассчитывается по формуле (8) таким образом получаемый посредством выделения одним из описанных выше способов профиля 109 в центральной части области.
В большинстве случаев форма профиля 109 претерпевает изменения и смещается относительно упомянутой центральной части М.
На примере поясничного отдела молочной коровы было установлено, что смещение вперед или назад относительно оптимального положения, не покидая пределов поясничного отдела, является причиной незначительного изменения значений FI и БОУ, тем самым оказывая небольшое влияние на расчет БОУ для общего пользования.
На Фигуре 22 изображен дополнительный аппарат PG, который предлагается использовать для внедрения способа в соответствии с настоящим изобретением. Этот аппарат состоит из усовершенствованного электронного игольчатого профилометра, содержащего множество игл 126, расположенных параллельно друг другу и имеющих возможность перемещения в направлении, по меньшей мере одной системы цифрового преобразования, предназначенной для конвертации в цифровой формат данных о положении упомянутых игл 127, по меньшей мере одного блока обработки данных Е, по меньшей мере одного периферийного пользовательского интерфейса 125. Такой аппарат PG включает в себя физический контакт инструмента и животного, что отличает его от аппарата D, посредством которого измерения выполняются бесконтактным способом.
В течение периода времени, когда этот усовершенствованный игольчатый профилометр PG находится на анатомической области животного 107, выполняется описание профиля 109, причем его разрешение пропорционально количеству игл профилометра. Средствами блока управления 101 выполняется преобразование данных о положении игл в электрический сигнал, обрабатываемый локальным или удаленным блоком обработки Е.
На Фигуре 23 изображен дополнительный аппарат SG, предназначенный для определения балльной оценки упитанности животного 107. Такой аппарат содержит по меньшей мере одну гибкую чувствительную ленту 131, состоящую из соответствующего количества электронных тензометрических датчиков 130, по меньшей мере одной системы преобразования в цифровой формат сигнала, передаваемого упомянутыми тензометрическими датчиками, по меньшей мере одного блока обработки данных Е, при этом гибкая чувствительная лента может приклеиваться к поверхности туловища исследуемого объекта или устанавливаться подкожно.
Электронные тензометрические датчики 130 такого аппарата выявляют расширение 132 или сжатие 133 в направлении перпендикулярном хребту животного 107, что необходимо для описания профиля 109 с разрешением, пропорциональным количеству тензометрических датчиков, встроенных в ленту 131.
Эти электронные тензометрические датчики при помощи кабеля или с использованием беспроводной технологии подключаются к блоку обработки данных (Е), установленному локально или удаленно, выполненному с возможностью извлечения профиля 109, обрабатываемого в соответствии с способами, описанными выше.
На Фигуре 23 изображен дополнительный аппарат S3, который предлагается использовать для внедрения способа в соответствии с настоящим изобретением. Этот аппарат состоит из трехмерного сканера известного уровня техники, например, времяпролетного типа (TOF), подсоединенного к блоку управления. Такого рода сборочная единица позволяет установить профиль 109, обработка данных которого осуществляется средствами блока обработки с целью расчета индекса FI, БОУ, оценочного веса и индекса фертильности, как это уже было описано.
Экспериментальные испытания
В таблице ниже представлено сравнение БОУ, присвоенной опытным ветеринаром, и БОУ, рассчитанной системой, при этом испытание проводилось в два этапа на одной и той же группе животных.
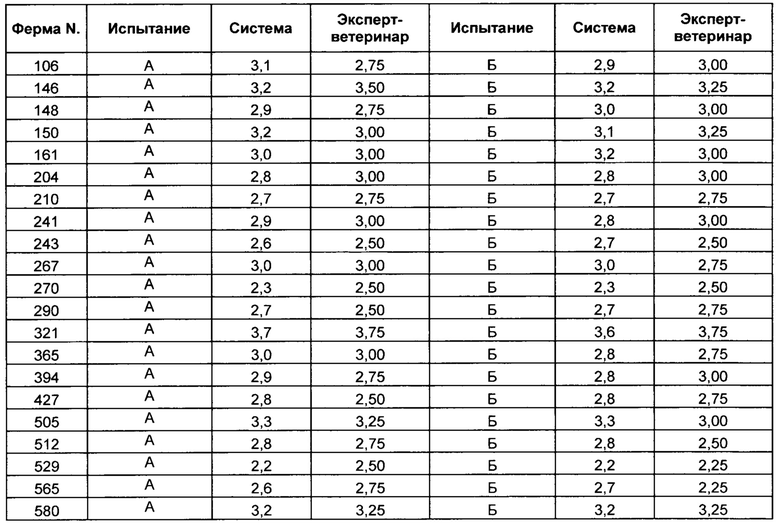
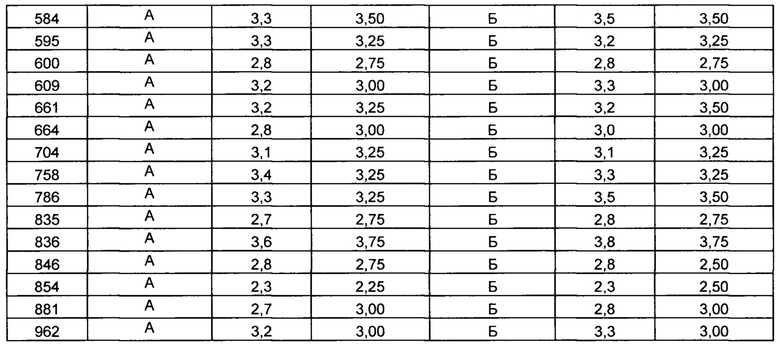
Испытание выполнялось способом «двойной анонимности» на группе объектов голштинской породы в двух испытательных кампаниях (А и В) с регистрацией результатов оценки, сделанной опытным ветеринаром, и расчета средствами рассматриваемой системы по формуле (8). В первом столбце указан идентификационный номер компании животных, в третьем и шестом столбцах - значения БОУ, рассчитанные системой в двух испытательных кампаниях А и В, в четвертом и седьмом столбцах - оценки, присвоенные опытным ветеринаром. Как видно, система характеризуется очень высокой степенью повторяемости результатов определения БОУ одного и того же объекта. Также в 85% случаев разница между оценкой системы и мнением оценщика составляет меньше четверти единицы.
Ряд новых особенностей, превосходящих известный уровень техники.
Аппарат D и способ, являющиеся предметом настоящего изобретения, имеют ряд существенных особенностей по сравнению с известным уровнем техники.
В частности, способ определения FI и БОУ и его прикладные инструменты позволяют автоматически выполнить оценку упитанности животного, определенным образом преодолев субъективную составляющую визуальной оценки, осуществляемой экспертом, в сочетании с уменьшением уровня сложности исследования, обеспечив возможность реализации способы на простых портативных устройствах.
Также в случае использования портативных устройств предлагаемая система позволяет значительно (5-10 секунд) снизить время обнаружения и оценки БОУ по сравнению с другими способами, реализуемыми на портативных устройствах, или применяемыми при визуальном контроле. Если речь идет о стационарной системе, оснащенной электронным устройством идентификации животных, время анализа снижается до времени съемки фотографии камерой (время срабатывания составляет доли секунды).
В случае использования портативных устройств для измерения БОУ скота в отличие от общей практики, согласно которой наблюдение за животным ведется сзади, а затем в периметре бокса для содержания (грязная зона), технический работник при выполнении измерений стоит напротив морды животного за пределами бокса.
Особенно эффективным является использование инструмента, когда животное ест, так как в этот момент животное просовывает морду в отверстие ограждения бокса. Таким образом технический работник, не покидая пределов коридора кормления, то есть находясь в чистой зоне, имеет возможность быстро определить БОУ всех «застрявших» животных в максимально безопасном режиме и сведя к минимуму время, необходимое для выполнения измерений для всех коров из стада.
Также при использовании портативных устройств предлагаемая система демонстрирует свою надежность даже при наличии возможных ошибок позиционирования относительно исследуемого объекта, а также при наличии скелетных вариаций у особей, характеризующихся одинаковой упитанностью.
Это обеспечивает существенную независимость системы от навыков использующего ее технического работника. Изменение положения измерительной системы относительно исследуемого объекта, например, высоты или угла наклона, не оказывает значительного влияния на значение БОУ. Более высокая квалификация влияет только на скорость сбора данных.
В случае применения устройств в сочетании с электронной системой идентификации исследуемого объекта скорость сбора данных увеличивается дополнительно.
В том случае, если исследованию подлежат животные пегой масти или животные, на туловище которых нанесена визуально различимая маркировка (например, клеймо на спине), в предпочтительном варианте осуществления изобретения предлагаемая система обеспечивает эффективное применение способов обработки изображений для идентификации животного на основании одного изображения, тем самым облегчая и дополнительно ускоряя процесс измерения.
Предлагаемый способ может быть реализован как на портативных устройствах, так и на решениях стационарного типа. В частности, устройство может устанавливаться стационарно и эффективно функционировать в автоматическом режиме в доильной установке любого типа, доильном роботе, в боксах для взвешивания или боксах для содержания животных, проходном коридоре или стойле.
Предлагаемый способ также может быть реализован в системах воздушного обнаружения, например, с использованием дрона или беспилотника.
В условиях мониторинга нескольких стад такого рода решение может эффективно сочетаться с другими визуальными и/или морфометрическими и/или биометрическими решениями по идентификации животных.
Важная новизна изобретения состоит в независимости способа и рассчитываемом по этой способу индексе упитанности FI в соответствии с видовыми признаками, породой, полом, возрастом и абсолютным размером исследуемого объекта.
Также новизна изобретения заложена в простоте его применения, устойчивости к изменениям окружающей среды, значительной независимости от возможностей пользователя и в реализуемости на портативных устройствах. Указанные характеристики обеспечивают возможность применения в периметре стойла.
Более того, в рамках настоящего изобретения особым образом выполняется оценка только морфологического признака (профиля), ветеринар рассматривает 5 или более из них. Применяя точную математическую корреляцию изобретение позволяет снизить количество оценок.
Также преимуществом предлагаемого способа над известным уровнем техники является возможность применения даже простых устройств (например, смартфонов), то есть отсутствие необходимости приобретения дополнительной аппаратуры. Это является прямым следствием того факта, что согласно способу в соответствии с изобретением анализ профиля 109 выполняется без привязки к абсолютному физическому размеру.
Выше дано описание предпочтительных вариантов осуществления изобретения и предложены варианты осуществления настоящего изобретения, но следует понимать, что специалисты в данной области техники могут выполнить доработку и внести изменения, не нарушая при этом необходимый объем охраны, как это определено в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГИСТОЛОГИЧЕСКОЙ ОЦЕНКИ МРАМОРНОСТИ МЯСА МЕЛКОГО СЕЛЬСКОХОЗЯЙСТВЕННОГО СКОТА | 2010 |
|
RU2439556C1 |
| СПОСОБ ОЦЕНКИ ПЛЕМЕННЫХ КАЧЕСТВ СВИНЕЙ | 2008 |
|
RU2384058C2 |
| ПРОБИОТИЧЕСКИЙ ПРЕПАРАТ НА ОСНОВЕ ШТАММА BIFIDOBACTERIUM BIFIDUM ДЛЯ ПРИМЕНЕНИЯ ДЛЯ ОБЛЕГЧЕНИЯ СИМПТОМОВ СИНДРОМА РАЗДРАЖЕННОГО КИШЕЧНИКА | 2012 |
|
RU2603285C2 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВЕННОГО ПОКАЗАТЕЛЯ СОСТОЯНИЯ ТЕЛА ЖИВОТНОГО | 2009 |
|
RU2543948C2 |
| СПОСОБ ПОЛУЧЕНИЯ МРАМОРНОГО МЯСА СВИНЕЙ ВЫСОКОГО КАЧЕСТВА | 2013 |
|
RU2535729C1 |
| СПОСОБ ОЦЕНКИ ПРОДУКТИВНОСТИ И ПЛЕМЕННОЙ ЦЕННОСТИ ПОСАДОЧНОГО МАТЕРИАЛА РАДУЖНОЙ ФОРЕЛИ | 2023 |
|
RU2812488C1 |
| Система организации рынка труда | 2016 |
|
RU2674877C2 |
| КОМПОЗИЦИИ И СПОСОБЫ ДЛЯ УЛУЧШЕНИЯ МОЛОЧНОЙ ПРОДУКТИВНОСТИ И РЕПРОДУКТИВНОГО ЗДОРОВЬЯ МЛЕКОПИТАЮЩИХ, ОСНОВАННЫЕ НА ПРИМЕНЕНИИ IL-8 | 2016 |
|
RU2736131C2 |
| Способ повышения продуктивности кроликов | 2019 |
|
RU2711917C1 |
| Композиции и способы для улучшения молочной продуктивности и репродуктивного здоровья млекопитающих, основанные на применении IL-8 | 2016 |
|
RU2682318C2 |

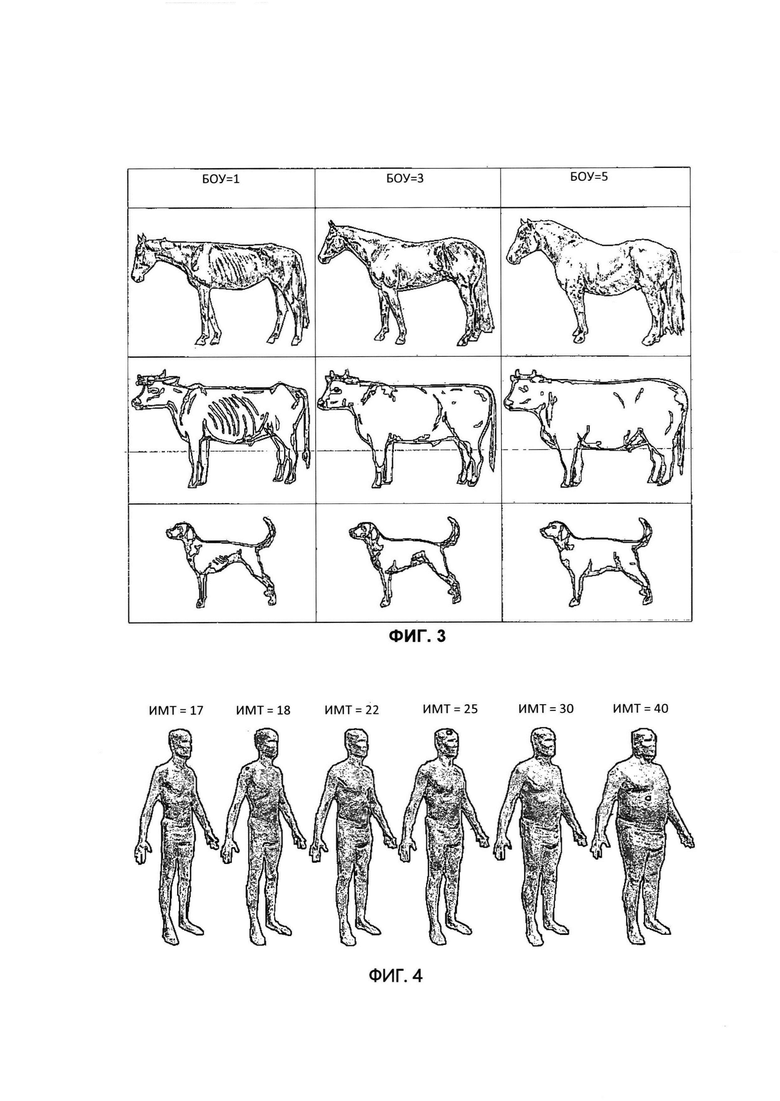
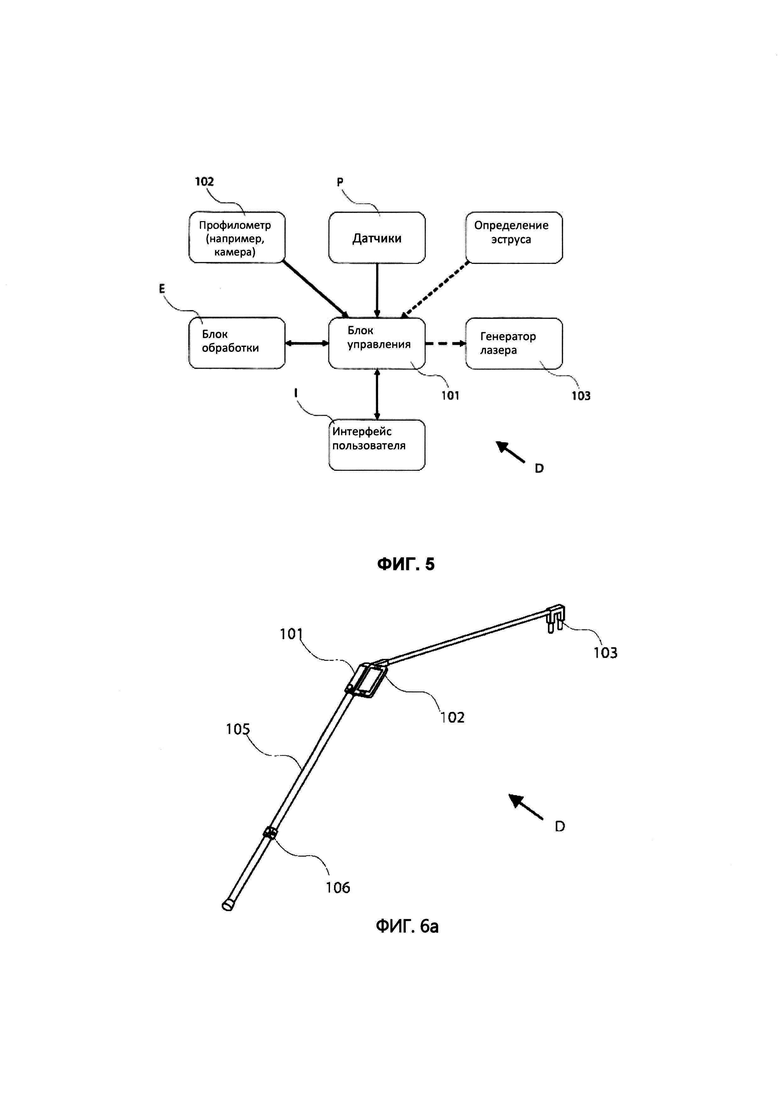
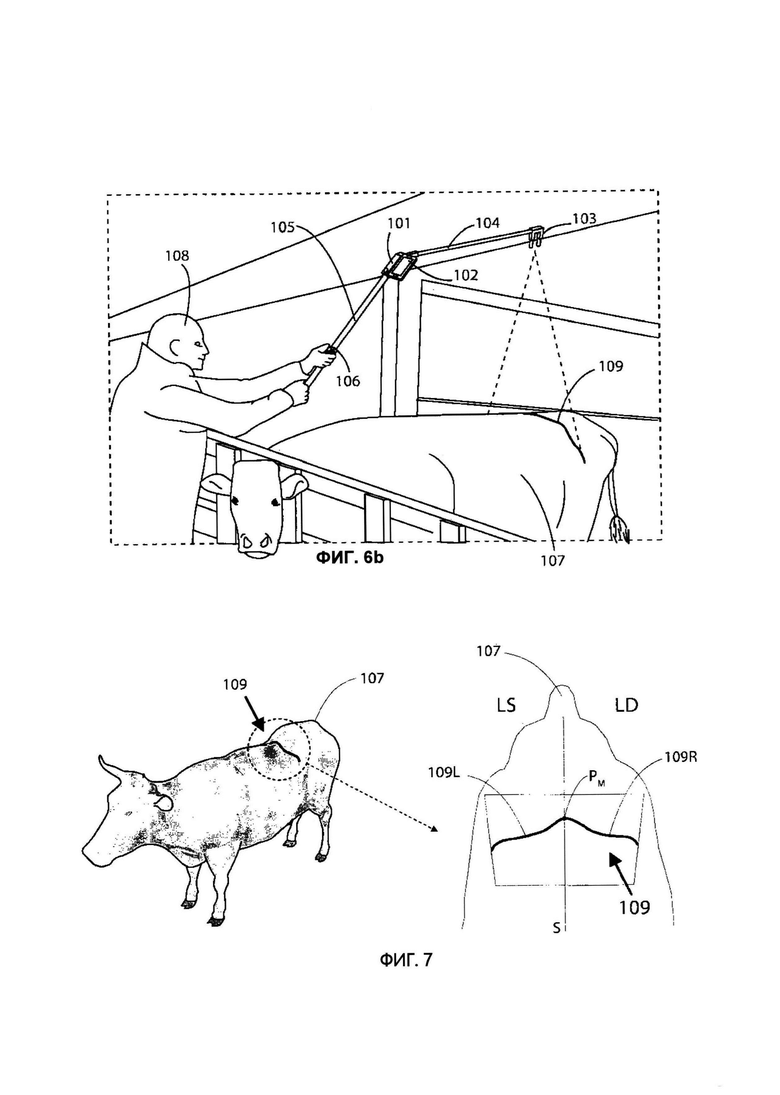
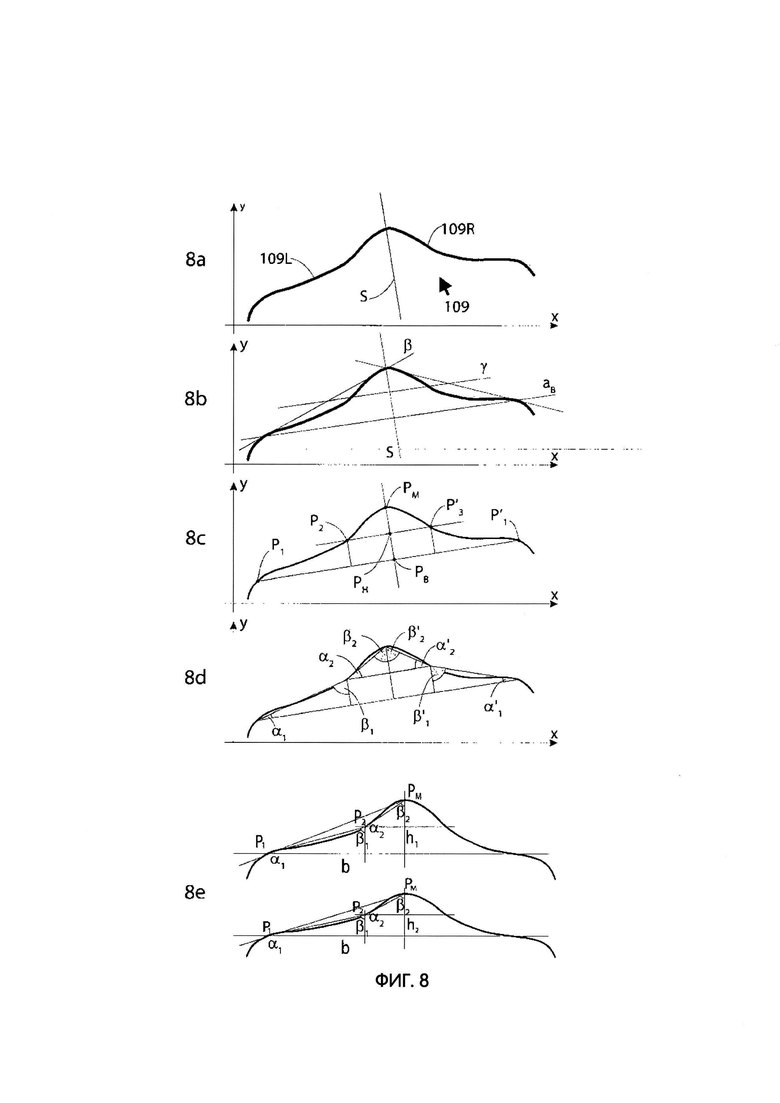

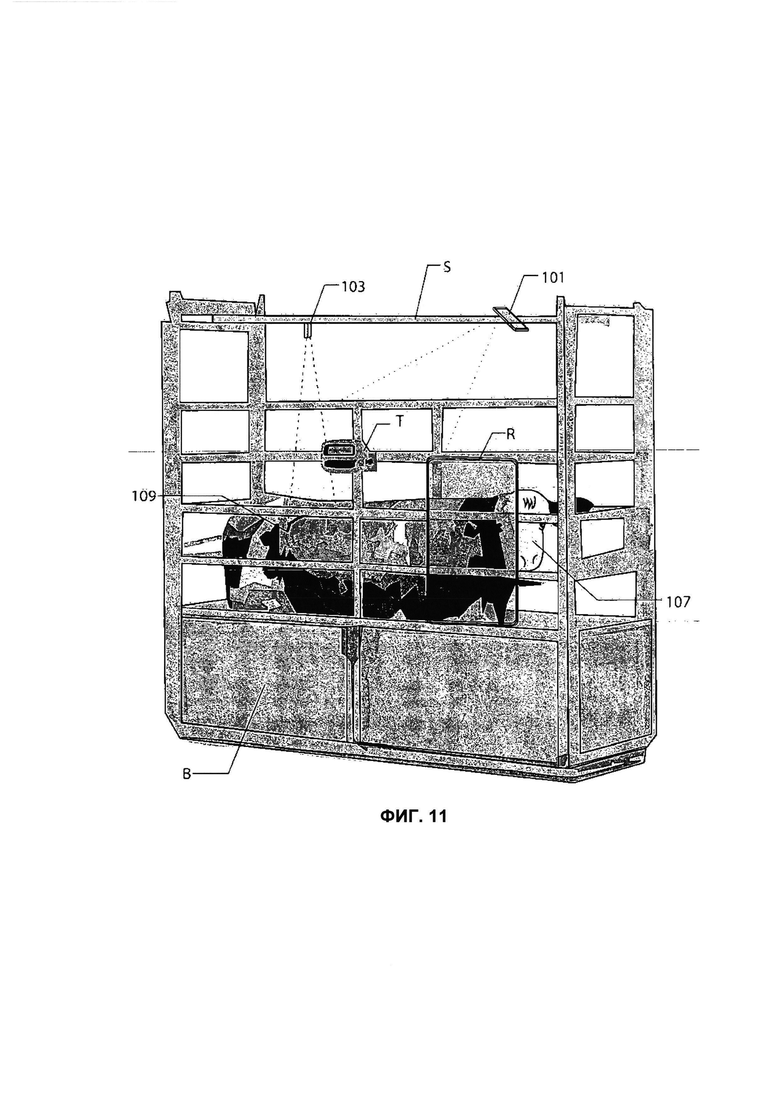

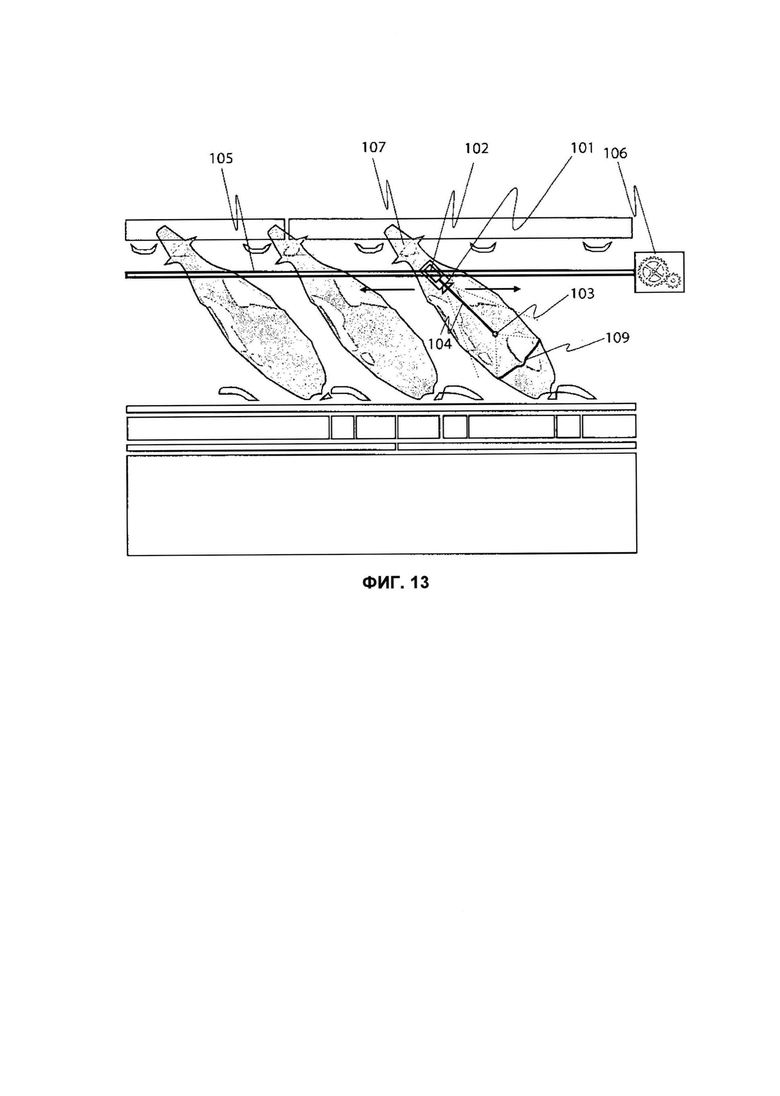
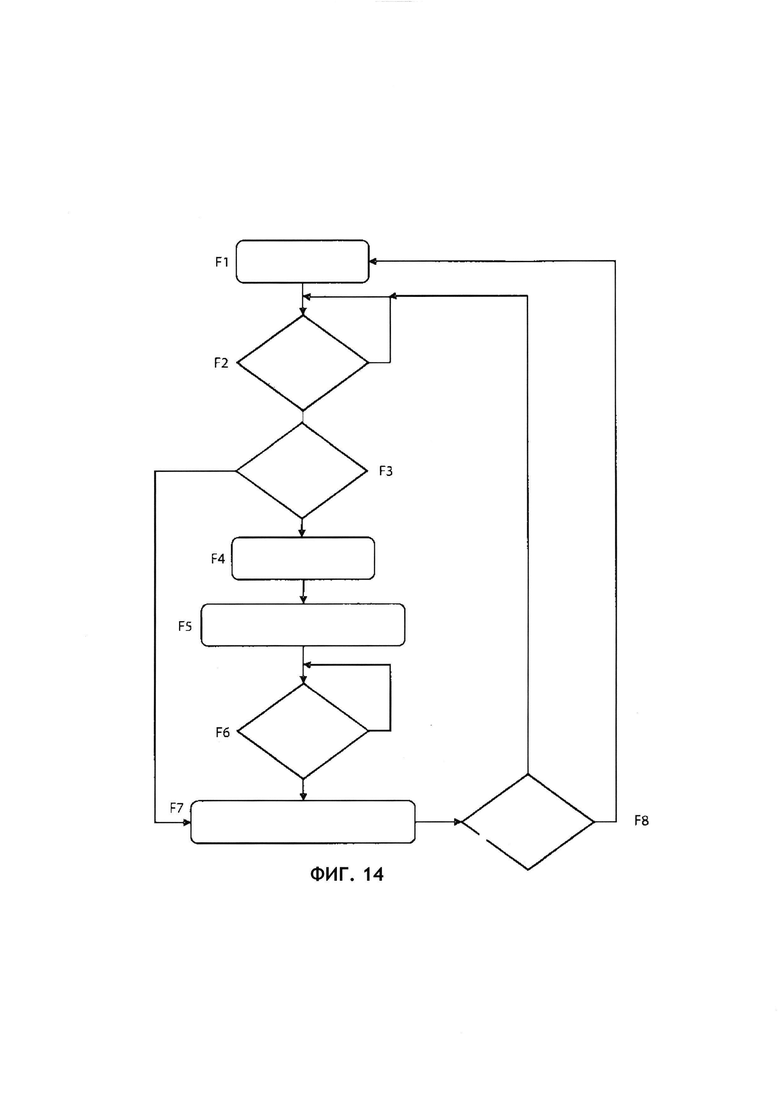
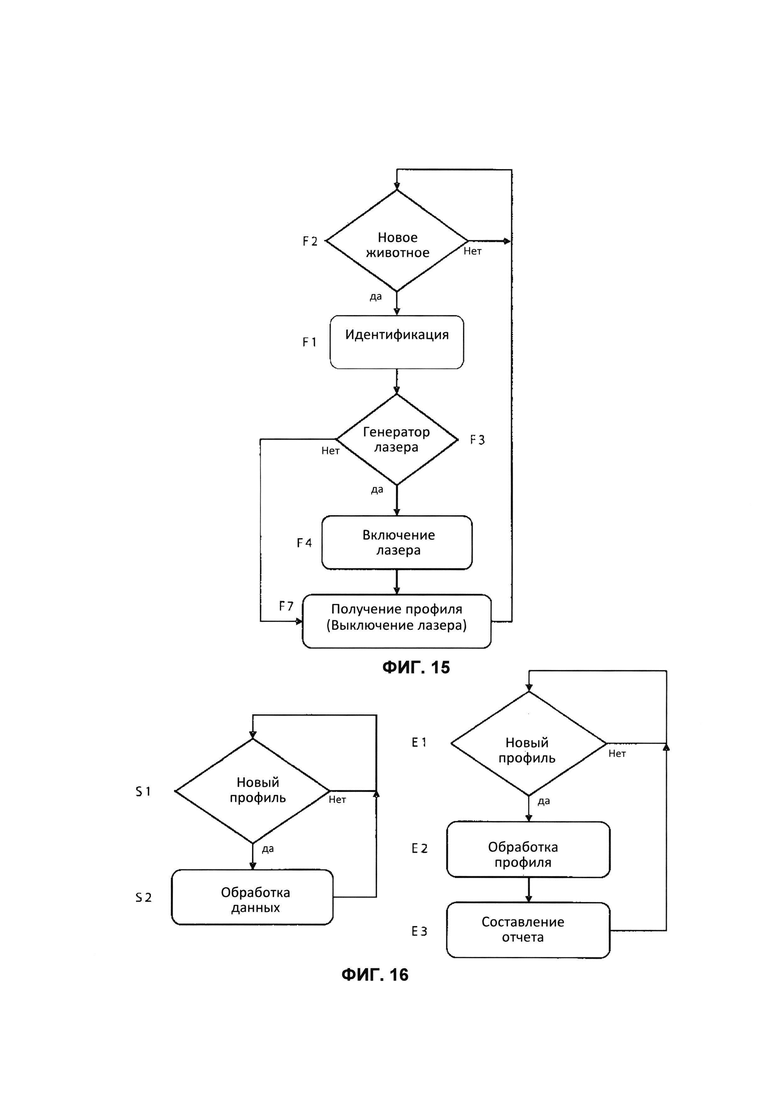
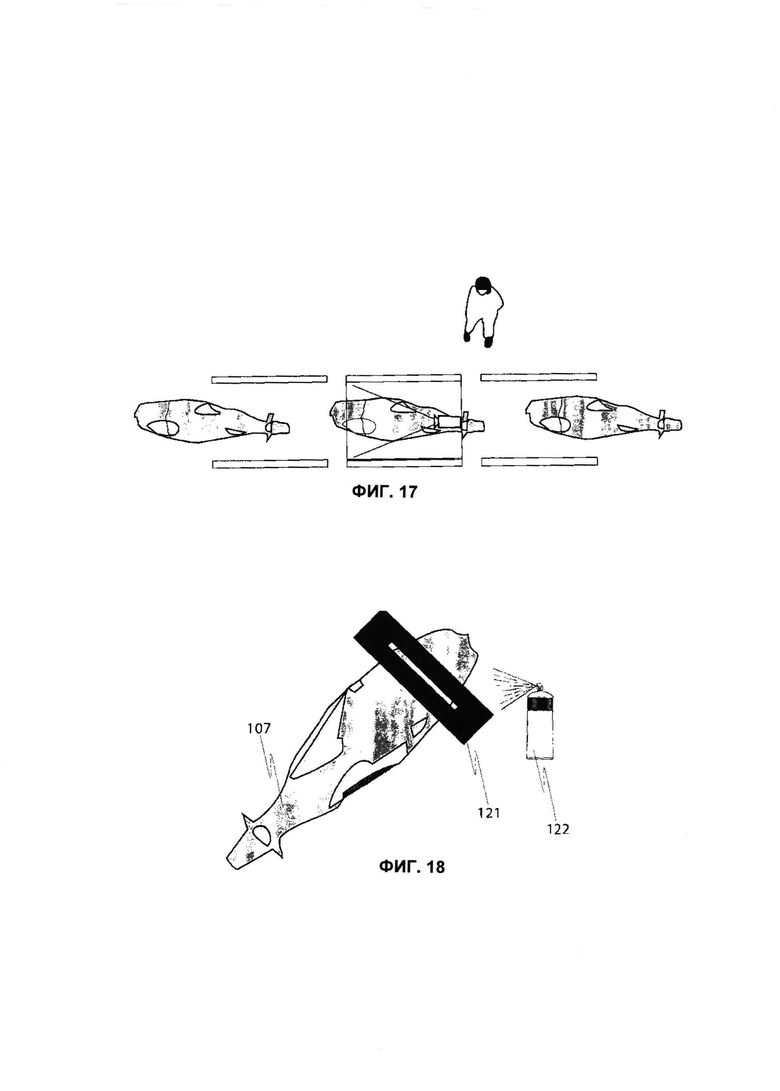
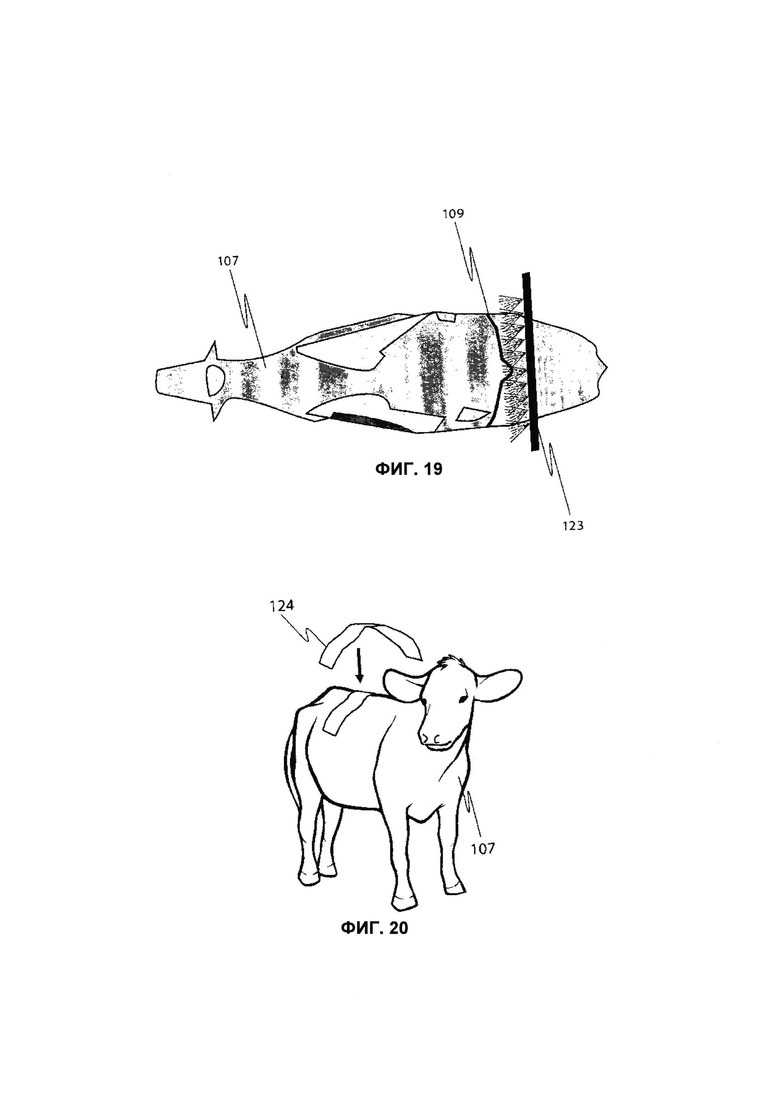
Настоящее изобретение относится к способу расчета балльной оценки упитанности, живого веса животного и статуса его фертильности посредством математической обработки ряда характерных морфологических признаков исследуемого объекта, которая использует по меньшей мере одно контактное или бесконтактное устройство определения профиля 109 животного, по меньшей мере один блок обработки данных и программу, применяющую особый математический метод интерпретации. Использование такого метода обеспечивает определение упитанности животного и его синтетического индекса откорма или FI независимо от видовых признаков, породы, пола, возраста и абсолютного размера исследуемого животного. Этот способ также характеризуется устойчивостью к возможным ошибкам позиционирования аппарата оператором. 2 н. и 18 з.п. ф-лы, 24 ил., 1 табл.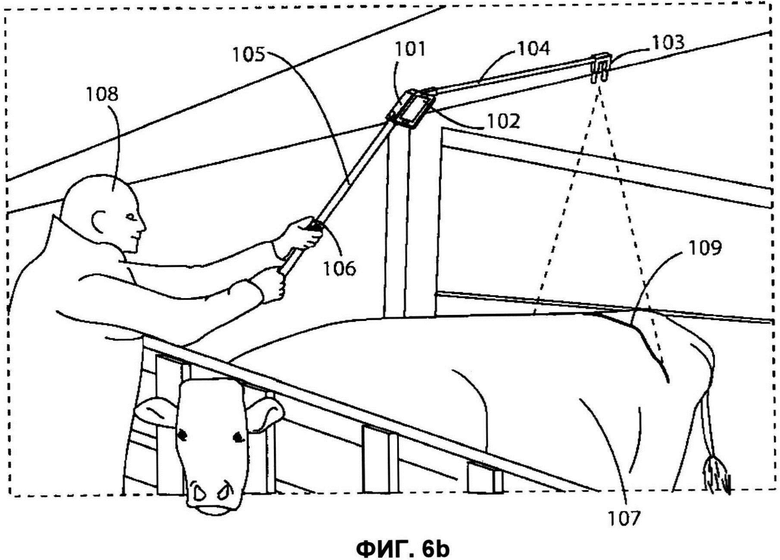
1. Способ определения числового индекса, характеризующего энергетические запасы, накопленные в виде жировой прослойки животным (107), при этом в момент измерения животное может быть как мертвым, так и живым, обладать любыми видовыми и родовыми признаками, включая признаки человека, например балльную оценку упитанности или индекс массы тела, при котором должны выполняться следующие этапы:
А) цифровое распознавание, посредством оптического обнаружения эталонных элементов, нанесенных или проецируемых на туловище исследуемого объекта, или с использованием другого типа контактных и бесконтактных систем обнаружения, по меньшей мере одного профиля (109) анатомической области, представляющей интерес с точки зрения морфологии, при этом упомянутый по меньшей мере один профиль представляет собой форму кривой, описывающей по меньшей мере часть внешнего периметра секции упомянутой анатомической области, такого рода кривая располагается в воображаемой плоскости, пересекающей упомянутую анатомическую область;
B) отправка упомянутого по меньшей мере одного профиля 109, получаемого на этапе А, средствам блока обработки данных Е;
C) расчет числового значения индекса R, характеризующего энергетические запасы, накопленные животным в виде жировой прослойки, в частности, в упомянутой анатомической области, средствами по меньшей мере одного блока обработки данных (Е) на основании по меньшей мере одного упомянутого профиля (109), получаемого на этапе А; и
D) корреляция средствами упомянутого блока обработки данных (Е) с использованием определенного математического преобразования упомянутого числового индекса R с одной или несколькими установленными особенностями упомянутого животного;
при этом на туловище животного присутствует первая сторона (левая сторона LS или правая сторона RS) упомянутой анатомической области относительно хребта животного (S) или присутствуют и первая и вторая стороны (левая сторона LS и правая сторона RS) упомянутой анатомической области относительно хребта (S), причем упомянутый профиль включает в себя точку относительного максимума PM на хребте животного и первую развертку профиля (109L или 109R) на упомянутой первой стороне или и первую и вторую развертки профиля (109L и 109R) соответственно на упомянутых первой и второй сторонах (левой стороне LS и правой стороне RS),
где способ отличается тем, что этап С включает в себя следующие подэтапы:
C1: индивидуализация координат точки относительного максимума PM упомянутого профиля;
С2: определение первой прямой линии (β), являющейся касательной по отношению к упомянутому профилю (109) упомянутой первой прямой линии, начинающейся от точки относительного максимума РМ и касающейся упомянутого профиля в первой точке касания Р1 упомянутой цервой стороны, или в дополнение к первой прямой касательной линии определение также второй прямой касательной линии (α), начинающейся от точки относительного максимума РМ и касающейся упомянутого профиля во второй точке касания Р1' на упомянутой второй стороне;
С3: в том случае, если на этапе 2 выполняется расчет только упомянутой первой точки касания Р1, принимая за вторую развертку (109L, 109R) упомянутого профиля зеркальное отражение упомянутой первой развертки относительно линии хребта и предполагая, что вторая точка касания Р'1 является зеркальным отражением упомянутой первой точки касания Р1 относительно линии хребта;
С4) расчет точки Р2 первой пунктирной линии и точки Р'2 второй пунктирной линии, являющихся пересечением упомянутого профиля и прямой линии (γ), параллельной основному сегменту, идущему от Р1 к Р'1, при этом параллельная прямая линия (γ) расположена таким образом, что линия перпендикулярна упомянутой параллельной прямой линии (γ) и проходит через РМ пересечения на упомянутой параллельной прямой линии точки РН и на упомянутом основном сегменте точки РВ, благодаря чему сегмент  практически равен сегменту
практически равен сегменту 
С5: расчет упомянутого числового индекса R по формуле

где α2 - угол между сегментами  α1 - угол между сегментами
α1 - угол между сегментами  α'2 - угол между сегментами
α'2 - угол между сегментами  α'1 - угол между сегментами
α'1 - угол между сегментами  , и где α2=α'2 и α1=α'1, если используется допущение, указанное в описании этапа С3.
, и где α2=α'2 и α1=α'1, если используется допущение, указанное в описании этапа С3.
2. Способ по п. 1, в котором на этапе С5 вначале синтетический индекс RL, относящийся к упомянутой первой развертке (109L) и синтетический индекс RR, относящийся к упомянутой второй развертке (109R), рассчитываются по формуле

и затем:
3. Способ по пп. 1 и 2, в котором

или: 
или: 
где коэффициенты ki являются постоянными, n - натуральное число n≥1, ϕ - универсальное угловое смещение, такое что 
 - среднее значение угловых величин α1 и α1',
- среднее значение угловых величин α1 и α1',  - среднее значение угловых величин α2 и α'2,
- среднее значение угловых величин α2 и α'2,  - i-я степень отношения среднего значения угловых величин к угловому смещению,
- i-я степень отношения среднего значения угловых величин к угловому смещению,  - среднее значение тангенсов углов α2 и α'2,
- среднее значение тангенсов углов α2 и α'2,  - i-я степень отношения упомянутых средних значений тангенсов
- i-я степень отношения упомянутых средних значений тангенсов
4. Способ по п. 3, в котором:
или:

5. Способ по п. 1, в котором на этане D числовые параметры упомянутого математического преобразования зависят но меньшей мере от видовых признаков и/или породы и/или этнической принадлежности и/или возраста объекта и получаются путем сравнения с референтной популяцией, оценка которой выполнялась по традиционной способу или с применением различных способов измерения известного уровня техники.
6. Способ по п. 5, в котором на этапе D выполняются следующие подэтапы:
D1. корреляция с применением первого предопределенного математического преобразования, например линейного преобразования, упомянутого числового индекса R, описание расчета которого дано в этапе С с применением оценочных шкал визуального контроля и ощупывания, такими как, например, линейные расчеты или балльная оценка упитанности для известного применения, в частности, применяемого для традиционной оценки упитанности продуктивных животных, животных-компаньонов и человека и получаемые путем сравнения с референтной популяцией, оценка которой выполнена техническим экспертом и/или другими способами известного уровня техники.
7. Способ по п. 1, в котором после этапа С выполняется следующий дополнительный этап:
E) корреляция с применением второго предопределенного математического преобразования упомянутого числового индекса R этапа С с весом животного, при этом упомянутое математическое преобразование зависит по меньшей мере от видовых признаков, и/или породы, и/или пола, и/или возраста животного и получаемые путем сравнения с референтной популяцией, взвешивание которой выполнялось с использованием весов, отвечающих требованиям.
8. Способ по п. 1, в котором после этапа С выполняется следующий дополнительный этап:
F) корреляция с применением дополнительного предопределенного математического преобразования упомянутого числового индекса R этапа С со степенью фертильности исследуемого объекта, получаемого путем сочетания числового индекса R и статуса эструса, определяемого средством известного уровня техники.
9. Способ по п. 1, в котором упомянутый профиль представляет собой профиль выбранной анатомической области в группе, содержащей поясничную область (L), брюшной отдел (А), крестцовой отдел (S), бедренную область (F), грудную клетку (Р), ягодичную область (G), область спины (D) или череп животного (107), в частности, в средней зоне (М) указанных областей.
10. Способ по п. 1, в котором воображаемая плоскость проходит перпендикулярно линии хребта животного.
11. Способ по п. 1, в котором системой обнаружения является профилометр, такой как триангуляционный сканер (например, лазерные линии с оптической регистрацией данных., времяпролетные и фазоразностные сканеры или гребенчатые шаблоны или же датчики-флексометры.
12. Способ по п. 1, отличающийся тем, что профиль, определенный на этапе А, направляется в блок управления 101, выполняющий сжатие и соединение с дополнительными данными, касающимися упомянутого животного 107, с последующей отправкой этих данных средствам упомянутого блока обработки данных (Е), установленного локально или удаленно.
13. Способ по п. 12, отличающийся тем, что упомянутые дополнительные данные, выявляемые одним или несколькими датчиками, в частности, включенными в комплект, содержащий: акселерометр, магнитометр, гироскоп, термометр, GPS, устройство обнаружения беспроводной сети (Wi-Fi), устройство считывания RFID (радиочастотной идентификации), устройство обнаружения RTLS (системы позиционирования в режиме реального времени), система определения статуса эструса и индивидуальные данные животного (107).
14. Способ по п. 1, отличающийся тем, что упомянутая балльная оценка упитанности, первичный индекс массы тела или другие оценки упитанности после установления видовых признаков, и/или этнической группы, и/или породы, и/или пола рассчитываются на основе числового индекса R или синтетического индекса откорма с использованием зависимости следующего типа:
где n - целое число, превышающее 1, Ri - i-я степень R и параметры ki являются постоянными, отражающими особенности популяции, к которой относится упомянутое животное, (107) и определяющими, например, видовые признаки и породу, причем эти постоянные определяются путем сравнения с референтной популяцией, оценка которой выполняется визуально или с применением инструментов известного уровня техники согласно традиционной способу.
15. Аппарат (D), предназначенный для определения числового индекса, отражающего энергетические запасы, накопленные животным (107) в виде жировой прослойки, и содержащий по меньшей мере одну контактную или бесконтактную систему обнаружения (102. 103, 124, 125, 126, 128, 129, 130) профиля (109) животного (107), по меньшей мере один блок управления (101) и по меньшей мере один блок обработки данных (Е), установленный локально или удаленно и подключенный к упомянутому блоку управления (101), причем упомянутый блок обработки данных (Е), установленный локально или удаленно, включает в себя программу, настроенную таким образом, что этапы С и D выполняются по способу по любому из пп. 1 - 14.
16. Аппарат (D) по п. 15, отличающийся тем, что упомянутая контактная или бесконтактная система обнаружения, предназначенная для определения профиля (109) животного (107), может дополнительно оснащаться:
а) камерой (102), выполненной с возможностью съемки изображений одного или нескольких животных (107), на туловище которых имеется профиль (109), выделенный посредством проекции когерентного или некогерентного светового шаблона или заранее нанесенный краской, клейкой пленкой или эластичной лентой,
при этом упомянутая камера (102) подключается к упомянутому блоку управления (101), имеющего функцию преобразования изображений в цифровой формат и/или функцией сжатия данных и/или функцией шифрования и/или функцией взаимодействия с пользователем и/или функцией передачи данных;
b) аппаратом (PG), содержащим соответствующее количество игл (126), подвижных в одном направлении, и по меньшей мере одну систему цифровой конвертации (127), предназначенную для преобразования в цифровой формат данных о положении упомянутых игл, при этом упомянутые подвижные иглы упираются в туловище животного (107), тем самым формируя профиль (109) с разрешением, пропорциональным их количеству, при этом упомянутая система преобразования в цифровой формат (127) позволяет конвертировать данные о положении упомянутых игл в электрический сигнал, обрабатываемый упомянутым блоком преобразования данных (Е);
c) аппаратом (SG), содержащим по меньшей мере одну ленту (131), чувствительную к изгибу и состоящую из множества электронных тензометрических датчиков (130), и по меньшей мере одну систему преобразования в цифровой формат сигнала упомянутых электронных тензометрических датчиков, при этом упомянутая чувствительная к изгибу лента (131) может приклеиваться к туловищу животного (107) или устанавливаться подкожно и посредством электронных тензометрических датчиков она способна выявлять расширение (132) или сжатие (133) в направлении, перпендикулярном линии хребта животного (107), что необходимо для описания профиля (109) с разрешением, пропорциональным количеству тензометрических датчиков, встроенных в упомянутую ленту (131), упомянутые электронные тензометрические датчики подключаются к упомянутому блоку обработки данных (Е).
17. Аппарат (D) по п. 15, дополнительно содержащий по меньшей мере один датчик положения (Р), выполненный с возможностью позиционирования упомянутого аппарата (D) относительно положения упомянутого животного (107).
18. Аппарат (D) по п. 15, в котором упомянутый аппарат (D) является портативным и включает в себя:
- удлинитель (105), один конец которого выполнен с возможностью удерживания, а второй конец служит опорой для упомянутой системы управления (101), такой, например, как смартфон со встроенной камерой (102);
- лазерный рычаг (104), один конец которого под углом, например, 135° подсоединяется к упомянутому удлинителю (105) и содержащий упомянутый лазерный генератор (103) на втором конце; и
- привод (106), расположенный на упомянутом первом конце удлинителя (105) и выполненный с возможностью управления упомянутым генератором (103) лазерного луча.
19. Аппарат (D) по п. 15, отличающийся тем, что содержит либо датчик присутствия животного в заранее определенной зоне, при этом упомянутый датчик присутствия животного направляет данные об обнаружении упомянутому блоку управления (101) для запуска этапа С способа, либо устройство считывания идентификационной бирки упомянутого животного, при этом упомянутое устройство считывания подключается к упомянутому блоку управления (101).
20. Аппарат (D) по п. 15, отличающийся тем, что содержит систему определения статуса эструса животного способом известного уровня техники, причем сочетание балльной оценки упитанности и статуса эструса является новым индикатором, определяемым в рамках настоящего документа как индекс фертильности, рассчитываемый по следующей формуле:
где Е представляет собой статус эструса, при этом Е=0 означает отсутствие эструса и Е=1 означает наличие эструса, БОУr - действительное значение и БОУi - идеальное значение БОУ животного, при этом индекс фертильности F может принимать следующие цифровые и смысловые значения:
- F=0, означает отсутствие эструса независимо от упитанности;
- F≅1 означает эструс и оптимальную упитанность (БОУr≅BCSi);
- F>1 означает состояние эструса в «перекормленности»;
- 0<F<1 означает состояние эструса в «недокормленности».
| WO 2004012146 A1, 05.02.2004 | |||
| US 2005257748 A1, 24.11.2005 | |||
| WO 2010063527 A1, 10.06.2010 | |||
| СПОСОБ КОНСЕРВИРОВАНИЯ МЕХОВЫХ ОВЧИН | 1992 |
|
RU2027770C1 |
| US 2013261470 А1, 03.10.2013 | |||
| WO 2010107383 А1, 23.09.2010 | |||
| WO 9604551 А1, 15.02.1996. | |||

