Изобретение относится к оптико-механическим системам обзора и может быть использовано в технике активной и пассивной локации пространства.
Известно сканирующее устройство кругового обзора, разработанное по схеме, использованной при создании автоматического секстанта астроориентатора БЦ-63 ("Авиационные системы информации оптического диапазона". Справочник. М.: "Машиностроение", 1985 г., стр.76-79), в котором для обзора пространства используются два зеркала. Конструкция его состоит из неподвижного корпуса и подвижного блока. На подвижном блоке установлен оптический узел, состоящий из двух зеркал, первое из которых имеет неизменное положение относительно подвижного блока, а ось вращения второго зеркала закреплена в подвижной опоре, установленной в подвижном блоке. Второе зеркало может поворачиваться вокруг оси подвижной опоры. Вращение этого зеркала обеспечивается приводом, установленным на подвижном блоке, связанным с осью вращения зеркала через редукторную связь и состоящим из датчика положения и двигателя. Питание двигателя и датчика, передача информации о положении второго зеркала, формируемая датчиком положения, осуществляется через систему скользящих контактов. Вращение подвижного блока относительно неподвижного корпуса обеспечивается приводом через редукторную связь. Привод содержит двигатель и датчик положения, установленные на неподвижном корпусе.
Недостатком этого сканирующего устройства кругового обзора являются излишняя масса и моменты инерции подвижного блока, снижающие быстродействие, а также наличие скользящих контактов, снижающих надежность.
Наиболее близким к предлагаемому изобретению является "Сканирующее устройство кругового обзора" (патент РФ 2271553, G01S 17/66, опубл. 10.03.06 г., Бюл. №7), содержащее неподвижный корпус, в котором установлены первый и второй подвижные блоки, образующие концентрическую конструкцию с общей осью вращения относительно неподвижного корпуса, оптический сканирующий узел, установленный на подвижной опоре, жестко связанной с первым подвижным блоком, и кинематически связанный со вторым подвижным блоком, каждый из подвижных блоков снабжен приводом с электродвигателем и датчиком положения, оптопары которых установлены на неподвижном корпусе.
Недостатком этого сканирующего устройства является снижение точности позиционирования за счет зазоров в зубчатых зацеплениях, кинематической погрешности изготовления и установки зубчатых колес. Наличие этих погрешностей увеличивает колебание подвижных блоков при остановках, реверсе и в режиме слежения за движущимися источниками излучения, что увеличивает время переходных процессов и снижает точность позиционирования подвижных блоков, при этом увеличивается потребляемая мощность.
Технический результат изобретения заключается в повышении быстродействия, точности позиционирования и слежения за счет установки роторов электродвигателей и кодовых дисков датчиков непосредственно на подвижные корпуса, исключая тем самым применение зубчатых зацеплений, что позволит значительно уменьшить габариты и массу сканирующего устройства, улучшить динамические характеристики и обеспечить плавное вращение подвижных элементов.
Технический результат достигается тем, что в сканирующем устройстве кругового обзора, содержащем неподвижный корпус, в котором установлены первый и второй подвижные блоки, образующие концентрическую конструкцию с общей осью вращения относительно неподвижного корпуса, оптический сканирующий узел, установленный на подвижной опоре, жестко связанной с первым подвижным блоком и кинематически связанной со вторым подвижным блоком, каждый из подвижных блоков снабжен приводом с электродвигателем и датчиком положения, оптопары которых установлены на неподвижном корпусе, статоры электродвигателей расположены на неподвижном корпусе, полые роторы электродвигателей первого и второго приводов, кодовые диски датчиков положения установлены на первом и втором подвижных блоках соответственно.
На чертеже представлено сканирующее устройство кругового обзора.
Сканирующее устройство кругового обзора содержит неподвижный корпус 1, в котором установлены первый подвижный блок 2 и второй подвижный блок 3, образующие концентрическую конструкцию с общей осью вращения относительно неподвижного корпуса 1. Оптический сканирующий узел 4 установлен на оси 6 подвижной опоры 5, жестко связанной с первым подвижным блоком 2. Ось 6 подвижной опоры 5 вращается перпендикулярно оси вращения подвижных блоков 2 и 3. Подвижная опора 5 жестко связана с первым подвижным блоком 2 и кинематически, через коническую шестерню 7, со вторым подвижным блоком 3. Подвижные блоки 2 и 3 снабжены приводами с электродвигателями и датчиками положения 8 и 9, оптопары которых установлены на неподвижном корпусе 1. На неподвижном корпусе 1 расположены статоры 10 и 11 электродвигателей приводов. На первом подвижном блоке 2 установлены полый ротор 12 первого электродвигателя, кодовый диск первого датчика положения 8 (азимутального). На втором подвижном блоке 3 установлены полый ротор 13 второго электродвигателя, кодовый диск второго датчика положения 9 (угломестного).
Сканирующее устройство кругового обзора работает следующим образом. Второй подвижный блок 3, установленный в неподвижном корпусе 1, при подаче напряжения на статор 11 второго электродвигателя начинает вращаться вместе с полым ротором 13 второго электродвигателя. Через кинематическую связь между зубчатым венцом второго подвижного блока 3 и конической шестерней 7 вращение передается оптическому сканирующему узлу 4, а датчик положения 9 будет выдавать координаты положения сканирующего узла 4 по углу места. Для исключения одновременного вращения по азимуту первого подвижного блока 2 подается кодированное напряжение на статор 10 первого электродвигателя, которое фиксирует первый подвижный блок 2 от проворота.
Подача одинакового напряжения на статоры 10 и 11 электродвигателей приведет во вращение полые роторы 12 и 13 электродвигателей, а значит и подвижные блоки 2 и 3 с одинаковой угловой скоростью, следовательно, сканирующий узел 4 будет вращаться только по азимуту, а датчик положения 8 будет выдавать соответствующие координаты по азимуту.
При подаче разных значений напряжения на статоры 10 и 11 электродвигателей первый подвижный блок 2 и второй подвижный блок 3 будут вращаться с разными скоростями, следовательно, подвижная опора 5 и сканирующий узел 4 будут вращаться по азимуту со скоростью первого подвижного блока 2. По углу места, через узел преобразования разности скоростей вращения, ось подвижной опоры 6, сканирующий узел 4 будут вращаться со скоростью, равной разности скоростей вращения первого подвижного блока 2 и второго подвижного блока 3.
Таким образом, подавая заранее выбранные комбинации напряжений на статоры электродвигателей, можно управлять движением сканирующего элемента по любому закону, обнаруживать источники излучения и слежение за ними в пределах всего полусферического пространства. При этом повышается быстродействие, точность позиционирования и слежения, снижается потребляемая мощность.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕПЛОПЕЛЕНГАТОР | 2016 |
|
RU2604959C1 |
| СКАНИРУЮЩЕЕ УСТРОЙСТВО КРУГОВОГО ОБЗОРА | 2004 |
|
RU2271553C2 |
| УСТРОЙСТВО ДЛЯ НАВЕДЕНИЯ ЛАЗЕРНОГО ПУЧКА | 2022 |
|
RU2787968C1 |
| КОСМИЧЕСКИЙ СКАНИРУЮЩИЙ ТЕПЛОПЕЛЕНГАТОР | 1992 |
|
RU2046369C1 |
| КОМБИНИРОВАННАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2014 |
|
RU2541494C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1997 |
|
RU2119681C1 |
| МОБИЛЬНЫЙ ОПТИЧЕСКИЙ ТЕЛЕСКОП | 2014 |
|
RU2565355C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОПТИЧЕСКОЙ ОСИ В ПРОСТРАНСТВЕ | 1986 |
|
SU1841049A1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1999 |
|
RU2166783C2 |
Изобретение относится к оптико-механическим системам обзора и может быть использовано в технике активной и пассивной локации пространства. Устройство содержит неподвижный корпус, в котором установлены первый и второй подвижные блоки, образующие концентрическую конструкцию с общей осью вращения относительно неподвижного корпуса, оптический сканирующий узел, установленный на оси подвижной опоры, жестко связанной с первым подвижным блоком и кинематически связанной со вторым подвижным блоком. Каждый из подвижных блоков снабжен приводом с электродвигателем и датчиком положения, оптопары которых установлены на неподвижном корпусе. Статоры электродвигателей расположены на неподвижном корпусе, полые роторы электродвигателей первого и второго приводов, кодовые диски датчиков положения установлены на первом и втором подвижных блоках соответственно. Технический результат - повышение быстродействия, точности позиционирования и слежения. 1 ил.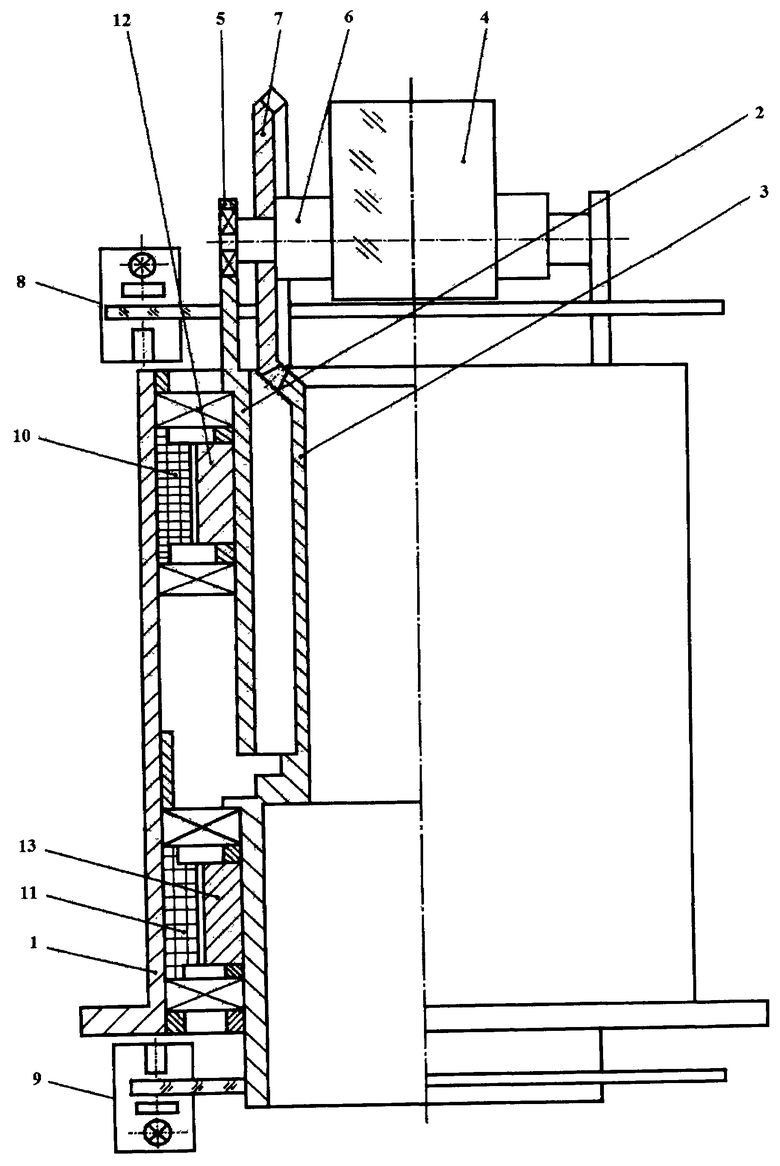
Сканирующее устройство кругового обзора, содержащее неподвижный корпус, в котором установлены первый и второй подвижные блоки, образующие концентрическую конструкцию с общей осью вращения относительно неподвижного корпуса, оптический сканирующий узел, установленный на оси подвижной опоры, жестко связанной с первым подвижным блоком и кинематически связанной со вторым подвижным блоком, каждый из подвижных блоков снабжен приводом с электродвигателем и датчиком положения, оптопары которых установлены на неподвижном корпусе, отличающееся тем, что статоры электродвигателей расположены на неподвижном корпусе, полые роторы электродвигателей первого и второго приводов, кодовые диски датчиков положения установлены на первом и втором подвижных блоках соответственно.
| СКАНИРУЮЩЕЕ УСТРОЙСТВО КРУГОВОГО ОБЗОРА | 2004 |
|
RU2271553C2 |
| JP 2008164691 А, 17.07.2008 | |||
| Сканирующее устройство | 1982 |
|
SU1065812A1 |
| СКАНИРУЮЩЕЕ УСТРОЙСТВО | 1992 |
|
RU2043647C1 |
| JP 11136906 А, 21.05.1999 | |||
| US 4982092 А, 01.01.1991. | |||

