Изобретение относится к оптико-механическим системам обзора и может быть использовано в технике активной и пассивной локации пространства.
Известно сканирующее устройство кругового обзора (А.С. №1290231 (СССР)), использующее для обзора пространства плоское зеркало, привод поворота по азимутальному углу и привод поворота по углу места. Обзор пространства осуществляется вращением плоского зеркала вокруг вертикальной оси с одновременным поворотом его вокруг оси, расположенной в его плоскости. Вращение по азимутальному углу осуществляется приводом с применением редуктора. Вращение по углу места осуществляется приводом с эксцентриком, который через рычаг передает движение на стержень, перемещающийся вдоль оси азимутального вращения и передающий линейное перемещение на подвижный узел крепления зеркала, где оно преобразуется во вращательное движение зеркала по углу места. Недостатком этого устройства кругового обзора является малая величина обзора по углу места.
Известно сканирующее устройство кругового обзора (А.С. №1076860 (СССР)), использующее для обзора пространства плоское зеркало, привод поворота по азимутальному углу и привод поворота по углу места. Обзор пространства осуществляется вращением плоского зеркала вокруг вертикальной оси с одновременным поворотом вокруг оси, расположенной в его плоскости. Вращение по азимутальному углу осуществляется приводом через редуктор, передающий движение оси вилки, в которой подвижно закреплено зеркало. По углу места движение от второго привода через кулачок и рычаг передается подвижному кольцу, которое может перемещаться вверх или вниз вдоль оси азимутального вращения. Это перемещение передается подвижному узлу зеркала, которое преобразует его во вращательное движение по углу места вокруг оси, лежащей в плоскости зеркала. Недостатком этого сканирующего устройства кругового обзора является малая величина обзора по углу места.
Наиболее близким аналогом предлагаемого изобретения следует признать сканирующее устройство кругового обзора, разработанное по схеме, использованной при создании автоматического секстанта астроориентатора БЦ-63 («Авиационные системы информации оптического диапазона». Справочник. М. «Машиностроение» 1985 г., стр.76-79), в котором для обзора пространства используются два зеркала. Конструкция его состоит из неподвижного корпуса и подвижного блока. На подвижном блоке установлен оптический узел, состоящий из двух зеркал, первое из которых имеет неизменное положение относительно подвижного блока, а ось вращения второго зеркала закреплена в подвижной опоре, установленной на подвижном блоке. Второе зеркало может поворачиваться вокруг оси подвижной опоры, вращение этого зеркала обеспечивается приводом, установленным на подвижном блоке, связанным с осью вращения зеркала через редукторную связь и состоящим из датчика положения и двигателя. Питание двигателя и датчика и передача информации о положении второго зеркала, формируемой датчиком положения, осуществляется через систему скользящих контактов. Вращение подвижного блока относительно неподвижного корпуса обеспечивается приводом через редукторную связь, привод содержит двигатель и датчик положения, установленные на неподвижном корпусе. Расположение привода второго зеркала, включающего двигатель и датчик положения, на подвижном блоке увеличивает его массу и габариты, а применение скользящих контактов снижает надежность конструкции сканирующего устройства в целом. Сканирование по азимуту осуществляется вращением подвижного блока относительно неподвижного корпуса, сканирование по углу места осуществляется поворотом второго зеркала вокруг оси, закрепленной в подвижной опоре, расположенной на подвижном блоке.
Техническим результатом настоящего решения является повышение быстродействия сканирующего устройства за счет снижения массы и габаритов подвижного блока при переносе привода второго зеркала на неподвижный корпус, увеличение надежности и срока службы за счет исключения из конструкции скользящих контактов.
Технический результат получен за счет того, что привод второго зеркала, обеспечивающий сканирование по углу места, перенесен с подвижного блока на неподвижный корпус, введен второй подвижный блок, установленный в неподвижном корпусе концентрически с первым подвижным блоком, оси вращения этих блоков относительно неподвижного корпуса совпадают, при этом массо-габаритные параметры каждого из подвижных блоков меньше, чем у подвижного блока прототипа, что снижает их моменты инерции и повышает быстродействие устройства в целом, при этом используется оптический узел, связанный с первым подвижным блоком, состоящий из двух зеркал, одно из которых имеет неизменное положение относительно первого подвижного блока, а ось вращения второго зеркала подвижно закреплена в опоре, расположенной на первом подвижном блоке. Ось вращения второго зеркала имеет механическую связь с узлом преобразования разности скоростей вращения первого и второго подвижных блоков, состоящим из подвижной опоры оси вращения второго зеркала, закрепленной на первом подвижном блоке, и редуктора, обеспечивающего угловое вращение этого зеркала вокруг оси, закрепленной в подвижной опоре. Вращение подвижных блоков с одинаковой угловой скоростью обеспечивает азимутальное сканирование, разница в скоростях вращения подвижных блоков обеспечивает сканирование по углу места при одновременном азимутальном сканировании. Вращение подвижных блоков и контроль их положения обеспечиваются приводами, расположенными в неподвижном корпусе - по одному на каждый блок - через редукторные связи, скорость сканирования определяется скоростями вращения подвижных блоков, которые зависят от скорости вращения двигателей, положение подвижных блоков определяется по информации, формируемой датчиками положения. Перенос привода с подвижного блока на неподвижный корпус позволил исключить из конструкции скользящие контакты и тем самым повысить надежность сканирующего устройства кругового обзора в целом.
Изобретение отличается от прототипа тем, что:
а) привод зеркала, обеспечивающего сканирование по углу места, перенесен с подвижного блока на неподвижный корпус;
б) в устройство дополнительно введен второй подвижный блок;
в) устройство дополнительно содержит узел преобразования разности скоростей вращения подвижных блоков в сканирование зеркала оптического узла по углу места.
Сущность изобретения поясняется графическим материалом, где на чертеже представлены два равнозначных варианта схемы построения сканирующего устройства кругового обзора. Устройство имеет неподвижный корпус 1, в котором концентрически установлены подвижные блоки 2 и 3. На одном из подвижных блоков располагается оптический узел 4, состоящий из двух зеркал 5 и 6, при этом зеркало 5 жестко закреплено на подвижном блоке, а зеркало 6 имеет на этом подвижном блоке опору 8, в которой крепится ось зеркала с возможностью вращения вокруг этой оси. Зеркало 5 направляет оптическую ось, совпадающую с осью вращения подвижных блоков в неподвижном корпусе, на зеркало 6, при этом ось вращения зеркала 6 совпадает с направленной на него оптической осью. Для осуществления поворота зеркала 6 вокруг оси, закрепленной в подвижной опоре, применяется узел преобразования разности скоростей вращения подвижных блоков 7, состоящий из подвижной опоры 8 и редукторной связи 9, при этом ось вращения зеркала 6 имеет редукторную связь 9, представленную двумя шестернями, с другим подвижным блоком, при этом одна шестерня жестко связана с осью зеркала 6, а вторая - с другим подвижным блоком. Разность угловых скоростей вращения подвижных блоков 2 и 3 приводит к тому, что взаимное вращение подвижных блоков передается через шестерню, расположенную на оси зеркала 6, что приводит к повороту этого зеркала, т.е. сканированию по углу места.
Подвижный блок 2 приводится во вращение приводом, расположенным в неподвижном корпусе 1 и состоящим из двигателя 10 и датчика положения 11. Вращение от двигателя 10 передается через редукторную связь 12 на подвижный блок 2, редукторная связь образована двумя шестернями, одна из которых расположена на оси двигателя 10, а другая - на подвижном блоке 2. Вращение с подвижного блока 2 передается на датчик положения 11 через редукторную связь 13, образованную двумя шестернями, одна из которых расположена на подвижном блоке 2, а другая - на оси датчика положения 11.
Подвижный блок 3 приводится во вращение приводом, расположенным в неподвижном корпусе и состоящим из двигателя 14 и датчика положения 15. Вращение от двигателя 14 передается через редукторную связь 16 на подвижный блок 3, редукторная связь образована двумя шестернями, одна из которых расположена на оси двигателя 14, а другая - на подвижном блоке 3. Вращение с подвижного блока 3 передается на датчик положения 15 через редукторную связь 17, образованную двумя шестернями, одна из которых расположена на подвижном блоке 3, а другая - на оси датчика положения 15.
При равенстве угловых скоростей подвижных блоков 2 и 3 взаимное положение зеркал 5 и 6 остается неизменным, при этом осуществляется сканирование только по азимуту. При разности угловых скоростей подвижных блоков 2 и 3 взаимное положение зеркал 5 и 6 меняется, при этом осуществляется одновременное сканирование по азимуту и углу места.
В качестве возможной элементной базы могут быть использованы электродвигатели серии ДПР, датчики положения «угол - код» типа ЛИР - 458, подшипники серии 1000813, 1000815, 1000819.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДИКАТОР ГОРИЗОНТАЛИ СВЕТОВОЙ | 2008 |
|
RU2376211C2 |
| СКАНИРУЮЩЕЕ УСТРОЙСТВО КРУГОВОГО ОБЗОРА | 2011 |
|
RU2470325C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2002 |
|
RU2242052C2 |
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ | 1999 |
|
RU2227303C2 |
| ТЕПЛОПЕЛЕНГАТОР | 2016 |
|
RU2604959C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО С МЕХАНИЧЕСКОЙ РАЗВЕРТКОЙ ДЛЯ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ | 2007 |
|
RU2340922C1 |
| ЛАЗЕРНЫЙ МАЯК | 2002 |
|
RU2248299C2 |
| ТЕПЛОПЕЛЕНГАТОР | 2011 |
|
RU2458356C1 |
| УСТРОЙСТВО СКАНИРОВАНИЯ И СЛЕЖЕНИЯ | 2017 |
|
RU2645733C1 |
| СПОСОБ МОНИТОРИНГА ЛЕСНЫХ ПОЖАРОВ И КОМПЛЕКСНАЯ СИСТЕМА РАННЕГО ОБНАРУЖЕНИЯ ЛЕСНЫХ ПОЖАРОВ, ПОСТРОЕННАЯ НА ПРИНЦИПЕ РАЗНОСЕНСОРНОГО ПАНОРАМНОГО ОБЗОРА МЕСТНОСТИ С ФУНКЦИЕЙ ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ОЧАГА ВОЗГОРАНИЯ | 2011 |
|
RU2486594C2 |
Назначение: изобретение относится к оптико-механическим системам обзора и может быть использовано в технике активной и пассивной локации пространства. Сущность изобретения: конструкция сканирующего устройства кругового обзора состоит из двух подвижных блоков, установленных концентрически в неподвижном корпусе и имеющих одну вращательную степень свободы относительно общей продольной оси. Каждый из подвижных блоков связан редуктором с приводом, в состав которого входят двигатель и датчик положения, установленные на неподвижном корпусе. Разность угловых скоростей подвижных блоков преобразуется в сканирование по углу места элементов оптического узла, установленного в подвижном блоке. При вращении подвижных блоков с одной угловой скоростью происходит слежение по азимуту, при вращении с разной угловой скоростью происходит одновременное слежение по азимуту и углу места. Достигаемый технический результат - исключение контактных колец, повышение надежности, снижение момента инерции подвижных частей за счет перенесения их приводов на неподвижный корпус. 1 ил.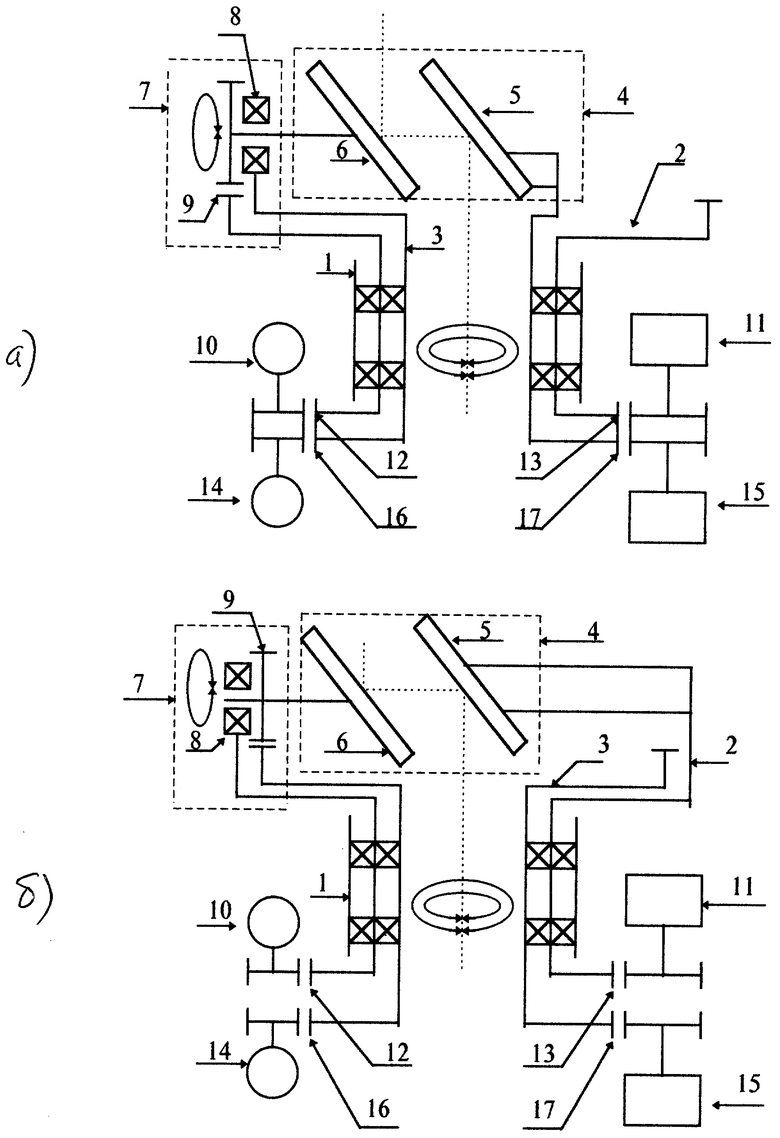
Сканирующее устройство кругового обзора, включающее неподвижный корпус, в котором установлен подвижный блок с оптическим узлом, отличающееся тем, что вводится второй подвижный блок, образующий совместно с первым подвижным блоком концентрическую конструкцию с общей осью вращения относительно неподвижного корпуса, и узел преобразования разности скоростей вращения первого и второго подвижных блоков в сканирование элементов оптического узла первого подвижного блока, при этом оптический узел состоит из двух зеркал, одно из которых имеет неизменное положение относительно первого подвижного блока, а другое имеет механическую связь с узлом преобразования разности скоростей вращения первого и второго подвижных блоков, состоящим из подвижной опоры и редуктора и обеспечивающим угловое вращение этого зеркала вокруг оси подвижной опоры, при этом вращение подвижных блоков с одинаковой угловой скоростью обеспечивает азимутальное сканирование, разница в скоростях вращения подвижных блоков обеспечивает сканирование по углу места при одновременном азимутальном сканировании, вращение подвижных блоков и контроль их положения обеспечивается приводами - по одному на каждый блок через редукторную связь, каждый из которых содержит двигатель и датчик положения, которые закреплены на неподвижном корпусе.
| Авиационные системы информации оптического диапазона | |||
| Справочник | |||
| Москва, изд | |||
| «Машиностроение», 1985, с.76-79 | |||
| Сканирующее устройство кругового обзора | 1986 |
|
SU1436094A2 |
| Сканирующее устройство кругового обзора | 1985 |
|
SU1290231A1 |
| Сканирующее устройство кругового обзора | 1982 |
|
SU1076860A1 |
| US 4502751, 05.03.1985 | |||
| US 5867317 A, 02.02.1990. | |||

