ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Изобретение относится, в общем, к способу определения направления торца бурильного инструмента, в частности к определению ориентации и/или углового смещения отклоняющегося звена компоновки низа бурильной колонны.
Управляемые системы для использования в бурении стволов скважин в пласте, например для последующего использования для добычи нефти или газа, являются хорошо известными. Одной управляемой системой является роторная управляемая система бурения, которая может предусматривать, по существу, непрерывное вращение бурильной колонны. Роторные управляемые системы можно классифицировать с разделением на системы "отталкивания всей компоновки от оси скважины", системы "позиционирования долота" или даже гибридные системы, такие, как описанная в патенте США №: 7188685 под названием Hybrid Rotary Steerable System/Гибридная роторная управляемая система. Примеры роторных управляемых систем, относящихся к типу с отталкиванием всей компоновки от оси скважины, и их работа описаны в публикациях патентных заявок США №№ 2002/001 1359; 2001/0052428 и патентах США №№ 6394193, 6364034, 6244361, 6158529, 6092610, 5113953, которые включены в данное описание путем ссылки. Примеры роторных управляемых систем с позиционированием долота и их работа описаны в патентах США № 5265682, 5553678, 5803185, 6089332, 5695015, 5685379, 5706905, 5553679, 5673763, 5520255, 5603385, 5582259, 5778992, 5971085, которые включены в данный документ путем ссылки.
Вне зависимости от типа управляемой системы, компоновка низа бурильной колонны системы бурения может включать в себя отклоняющееся звено. Данное звено можно использовать, например, для нацеливания торца бурильного инструмента в необходимом направлении, при этом можно управлять направлением прохождения скважины. Перемещение звена относительно компоновки низа бурильной колонны, то есть направление отклоняющегося звена, в основном регулируется усилием, приложенным исполнительными механизмами наведения, приводящимися в действие буровым раствором. Данные усилия могут быть связаны с относительно фиксированным строением пласта, а не с вращающейся компоновкой низа бурильной колонны, и таким образом направление приложения усилия исполнительными механизмами для нацеливания отклоняющегося звена может быть связано с инерциальной системой.
Неизвестные силы, например, динамического давления на забое, изгиба, фрикционного контакта компоновки низа бурильной колонны с пластом, реактивные силы от бурового долота, трения звена, осевой нагрузки на долото и т.д., действуют, нарушая направление нацеливания отклоняющегося звена, то есть торца бурильного инструмента. Может являться необходимым определение направления нацеливания торца инструмента или, конкретнее, определение ориентации и/или углового смещения отклоняющегося звена компоновки низа бурильной колонны.
Ориентация и/или угловое смещение отклоняющегося звена относительно компоновки низа бурильной колонны может быть непосредственно измерено преобразователем координат или угловым потенциометром на отклоняющемся звене и/или датчиками зазора, измеряющими относительные перемещения в двух, не лежащих на одной прямой, плоскостях (индуктивные, емкостные и т.д.), между отклоняющимся звеном и компоновкой низа бурильной колонны. Вместе с тем включение в состав таких устройств может быть невозможным или нежелательным, например, по жестким допускам.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном варианте осуществления способ определения ориентации отклоняющегося звена, соединенного с компоновкой низа бурильной колонны, может включать в себя создание множества радиально расположенных исполнительных механизмов, приводимых в действие текучей средой, для отклонения отклоняющегося звена, корреляцию известной ориентации отклоняющегося звена относительно компоновки низа бурильной колонны с набором известных значений давления на выпуске множества радиально расположенных исполнительных механизмов, измерение давления на выпуске текучей среды, по меньшей мере, одного из множества радиально расположенных исполнительных механизмов для создания набора значений давления на выпуске и сравнение набора значений давления на выпуске и скоррелированного набора известных значений давления на выпуске для определения ориентации отклоняющегося звена относительно компоновки низа бурильной колонны. Способ может включать в себя обеспечение наклона и азимута компоновки низа бурильной колонны относительно пласта и установку угла наклона и азимута отклоняющегося звена относительно пласта посредством ориентации отклоняющегося звена относительно компоновки низа бурильной колонны и наклона и азимута компоновки низа бурильной колонны относительно пласта.
Способ может включать в себя подачу текучей среды из канала компоновки низа бурильной колонны. Текучая среда может быть буровым раствором. Способ может включать в себя измерение, по меньшей мере, одного из следующего: давления подачи текучей среды и давления текучей среды в обратную сторону локально во множестве радиально расположенных исполнительных механизмов, и удаление любой потери давления, связанной с, по меньшей мере, одним из: давления подачи текучей среды и давления текучей среды в обратную сторону от давления на выпуске для создания набора значений давления на выпуске. Набор известных значений давления на выпуске может являться набором известных пиковых значений давления на выпуске.
В другом варианте осуществления способ определения углового смещения отклоняющегося звена, соединенного с компоновкой низа бурильной колонны, может включать в себя создание множества радиально расположенных исполнительных механизмов, приводимых в действие текучей средой для отклонения отклоняющегося звена, корреляцию известного углового смещения отклоняющегося звена относительно компоновки низа бурильной колонны с набором известных значений давления на выпуске множества радиально расположенных исполнительных механизмов, измерение давления на выпуске текучей среды, по меньшей мере, одного из множества радиально расположенных исполнительных механизмов для создания набора значений давления на выпуске и сравнение набора значений давления на выпуске и скоррелированного набора известных значений давления на выпуске для определения углового смещения отклоняющегося звена относительно компоновки низа бурильной колонны.
Способ может включать в себя обеспечение угла наклона и азимута компоновки низа бурильной колонны относительно пласта и установку наклона и азимута отклоняющегося звена относительно пласта посредством углового смещения отклоняющегося звена относительно компоновки низа бурильной колонны и наклона и азимута компоновки низа бурильной колонны относительно пласта. Способ может включать в себя подачу текучей среды из канала компоновки низа бурильной колонны. Текучая среда может быть буровым раствором. Способ может включать в себя измерение, по меньшей мере, одного из: давления подачи текучей среды и давления текучей среды в обратную сторону локально во множестве радиально расположенных исполнительных механизмов, и удаление любой потери давления, связанной с, по меньшей мере, одним из: давления подачи текучей среды и давления текучей среды в обратную сторону от давления на выпуске для создания набора значений давления на выпуске. Набор известных значений давления на выпуске может быть набором известных пиковых давлений на выпуске.
В другом варианте осуществления способ определения углового смещения отклоняющегося звена, соединенного с компоновкой низа бурильной колонны, может включать в себя создание множества радиально расположенных исполнительных механизмов, приводимых в действие текучей средой для отклонения отклоняющегося звена, измерение давления на выпуске текучей среды, по меньшей мере, одного из множества радиально расположенных исполнительных механизмов для создания набора значений давления на выпуске, выведение набора значений расхода на выпуске из набора значений давления на выпуске, расчет набора данных о состоянии параметров срабатывания для множества радиально расположенных исполнительных механизмов из набора значений расхода на выпуске и определение углового смещения отклоняющегося звена относительно компоновки низа бурильной колонны из набора данных о состоянии параметров срабатывания множества радиально расположенных исполнительных механизмов.
Этап расчета набора данных о состоянии параметров срабатывания может включать в себя интегрирование набора значений расхода на выпуске на временном интервале. Этап расчета набора данных о состоянии параметров срабатывания может включать в себя интегрирование набора значений расхода на выпуске на временном интервале для создания набора объемных данных, корреляцию известного объема выпущенной текучей среды с известным рабочим объемом исполнительного механизма и выработку набора данных о состоянии параметров срабатывания посредством набора объемных данных и известного объема выпущенной текучей среды, скоррелированных с известным рабочим объемом исполнительного механизма. Способ может включать в себя расчет скорости изменения углового смещения из углового смещения.
Способ может включать в себя обеспечение наклона и азимута компоновки низа бурильной колонны относительно пласта и установку наклона и азимута отклоняющегося звена относительно пласта посредством углового смещения отклоняющегося звена относительно компоновки низа бурильной колонны и наклона и азимута компоновки низа бурильной колонны относительно пласта. Способ может включать в себя подачу текучей среды из канала компоновки низа бурильной колонны, при этом текучая среда является буровым раствором. Способ может включать в себя измерение, по меньшей мере, одного из: давления подачи текучей среды и давления текучей среды в обратную сторону локально на множестве радиально расположенных исполнительных механизмов, и удаление любой потери давления, связанной с, по меньшей мере, одним из: давления подачи текучей среды и давления текучей среды в обратную сторону от давления на выпуске для создания набора значений давления на выпуске. Набор известных значений давления на выпуске может быть набором известных пиковых давлений на выпуске.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
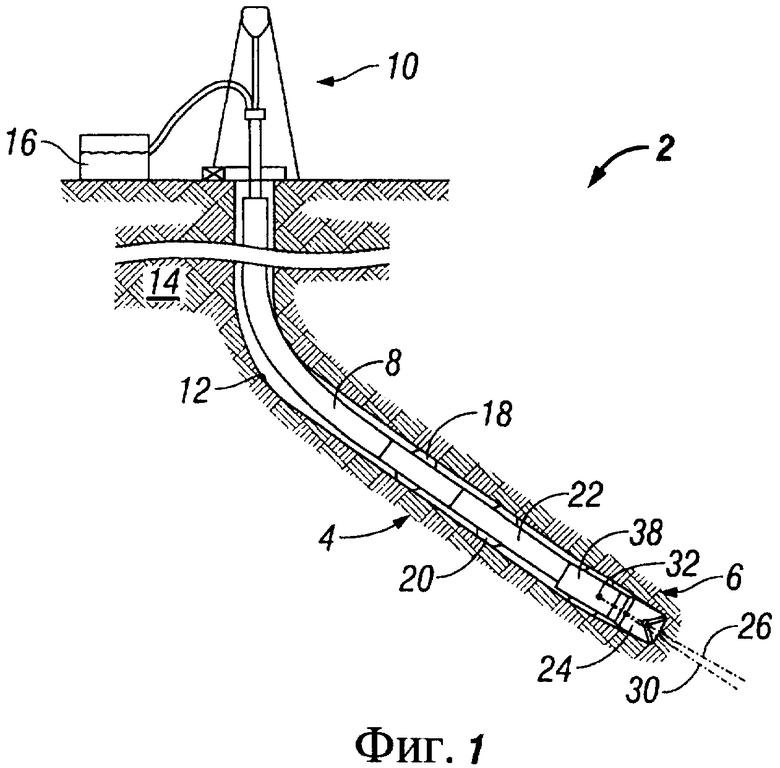
Фиг. 1 изображает схематичный вид сечения роторной управляемой системы, имеющей компоновку низа бурильной колонны с отклоняющимся звеном согласно одному варианту осуществления изобретения.
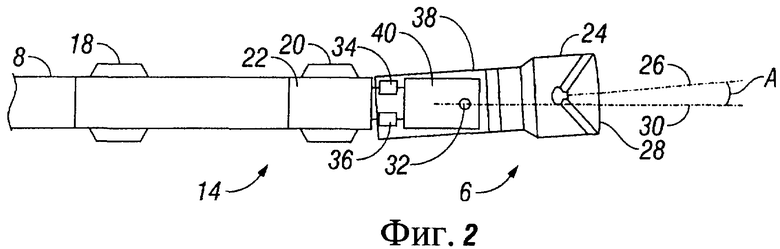
Фиг. 2 изображает схематичный вид сбоку компоновки низа бурильной колонны с отклоняющимся звеном фиг. 1.
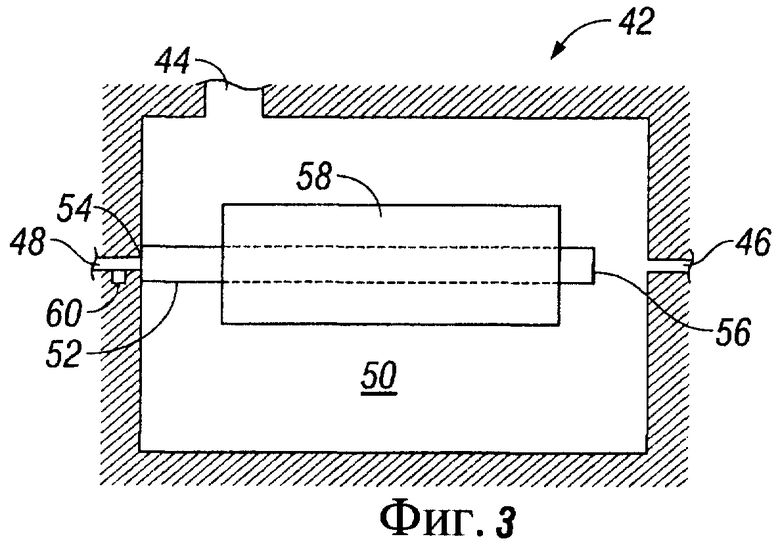
Фиг. 3 изображает схематичный вид сечения исполнительного механизма согласно одному варианту осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изобретение относится, в общем, к способу определения направления торца бурильного инструмента, в частности определения ориентации и/или углового смещения отклоняющегося звена компоновки низа бурильной колонны. При использовании в данном описании термином «ориентация» именуется положение относительно определенной точки или объекта, например направление смещения оси объекта относительно места или другого объекта. Термин «угловое смещение» относится к положению относительно конкретного места или другого объекта (то есть ориентации) и величине угла схождения между ними, например, численному значению степени смещения оси объекта относительно другого объекта.
На фиг. 1-2 показан один конкретный вариант системы, которая может использоваться для способов изобретения, однако способы этим не ограничены.
На фиг. 1 схематично показан вид сечения роторной управляемой системы 2, имеющей компоновку 4 низа бурильной колонны с отклоняющимся звеном 6, согласно одному варианту осуществления изобретения. На Фиг. 2 схематично показан вид сбоку отклоняющегося звена 6 компоновки 4 низа бурильной колонны Фиг. 1. Компоновка 4 низа бурильной колонны (КНБК) соединена с концом трубчатой бурильной колонны 8, которую может приводить во вращение буровая установка 10 на поверхности для бурения ствола скважины 12 в пласте 14. В дополнение к созданию двигательной силы для вращения бурильной колонны 8 буровая установка 10 может подавать буровой раствор 16 под давлением через трубчатую бурильную колонну 8 на компоновку 4 низа бурильной колонны. Для достижения управления по направлению во время бурения компоненты компоновки 4 низа бурильной колонны могут включать в себя, например, отклоняющееся звено 6 и/или один или несколько центраторов 18, 20 утяжеленных бурильных труб роторной управляемой системы 2. В верхней секции 22 компоновки 4 низа бурильной колонны может размещаться электронное оборудование и/или другие устройства управления роторной управляемой системы 2.
Отклоняющееся звено 6 компоновки 4 низа бурильной колонны, показанное на фиг. 1-2, включает в себя буровое долото 24 на дальнем конце. Буровое долото 24 может относиться к любому типу долота, известного в технике. На фиг. 2 показано общее направление 26 торца 28 бурильного инструмента в текущем состоянии приведения в действие (например, центральной осевой линией), смещенное от центральной оси 30 компоновки низа бурильной колонны 4 на величину А отклонения. При использовании отклоняющееся звено 6 может обеспечивать смещение оси торца 28 бурильного инструмента от центральной оси 30 компоновки 4 низа бурильной колонны, например, такое, что направление 26 оси бурового долота 24 образует направление прохождения ствола 12 скважины.
Отклоняющееся звено 6 компоновки 4 низа бурильной колонны в данном варианте осуществления, показанном на фиг. 1-2, включает в себя вертлюг 32, который может являться карданным соединением. Вертлюг 32 может сам передавать крутящий момент от забойного гидравлического двигателя или бурильной колонны 8 на буровое долото 24, или крутящий момент может передаваться отдельно посредством другого устройства. Подходящие устройства передачи крутящего момента могут включать в себя много хорошо известных устройств, таких как шлицевые муфты, устройства с зубчатыми передачами, карданные соединения и устройства с шариковой гайкой. В одном варианте осуществления вертлюг 32 может создавать точку поворота на 360 градусов для отклоняющегося звена 6. Вертлюг 32 может являться звеном с двумя степенями свободы. При использовании в данном описании отклоняющееся звено означает любое устройство для изменяемого смещения оси одного конца относительно другого. Неограничивающие примеры отклоняющихся звеньев включают в себя буровое долото с поворотной головкой и поворотную втулку, например, описанные в патентной заявке США № 10/248,053, включенной путем ссылки в данный документ.
Усилие для поворота отклоняющегося звена 6 относительно компоновки 4 низа бурильной колонны могут создавать один или несколько известных исполнительных механизмов 34, 36. Исполнительные механизмы 34, 36 могут приводиться в действие текучей средой, например буровым раствором 16. Гидравлический исполнительный механизм может представлять собой, например, исполнительный механизм со сбросным клапаном, исполнительный механизм с двумя устойчивыми состояниями и бурильную систему, включающую в себя аналог описанного в патентной заявке США № 11/609996, включенной путем ссылки в данный документ. Исполнительный механизм 34, 36 может включать в себя цилиндр и поршень, приводимый в действие рабочей текучей средой.
В варианте осуществления на фиг. 2 показаны два исполнительных механизма 34, 36, при этом можно использовать любое число исполнительных механизмов для достижения необходимого уровня управления отклонением. Настоящий вариант осуществления включает в себя втулку 38, установленную на шпинделе 40 компоновки 4 низа бурильной колонны посредством вертлюга 32. Втулка 38 может выборочно смещаться одним или несколькими исполнительными механизмами 34, 36 вокруг вертлюга 32 относительно компоновки 4 низа бурильной колонны, например, для активного поддержания общего направления 26 торца 28 бурильного инструмента в конкретном направлении, при этом вся компоновка может вращаться со скоростью вращения бурильной колонны 8. Термин активно отклоняющийся предусматривает отличие в том, как роторную управляемую систему 2 можно динамически ориентировать в сравнении с известными блоками фиксированного смещения. Активно отклоняющийся относится к роторной управляемой системе 2, не имеющей фиксированной установки ориентации (например, направления инструмента) и/или углового смещения (количественного параметра нацеливания торца инструмента в некотором направлении). Ориентация и/или угловое смещение могут динамически изменяться при управлении роторной управляемой системой 2.
Может быть необходимым установление ориентации и/или углового смещения торца 28 бурильного инструмента относительно компоновки 4 низа бурильной колонны и/или пласта 14. Например, может являться необходимым активное поддержание торца 28 бурильного инструмента в геостационарной ориентации. В варианте осуществления на фиг. 1-2 положение торца 28 бурильного инструмента бурового долота 24 относительно компоновки 4 низа бурильной колонны первично управляется отклонением втулки 38 с буровым долотом 24, скрепленным с ее дальним концом, посредством исполнительных механизмов 34, 36. Исполнительные механизмы 34, 36 можно последовательно приводить в действие при вращении компоновки 4 низа бурильной колонны так, чтобы отклонение бурового долота 24 активно поддерживалось в необходимом направлении относительно бурящегося пласта 14.
Альтернативно или дополнительно, исполнительные механизмы (34, 36) можно периодически выборочно приводить в действие или в зависимости от направления в наполовину выборочном режиме для создания менее агрессивного наведения при вращении компоновки 4 низа бурильной колонны. Во время бурения также существуют события, при которых возникает необходимость приводить в действие комбинацию исполнительных механизмов 34, 36, все механизмы или ни одного механизма одновременно.
В роторной управляемой системе 2 бурильная колонна 8 может постоянно вращаться, и, таким образом, наведение по траектории ствола 12 скважины в пласте 14 может вызывать необходимость привязки ориентации и/или углового смещения торца 28 бурильного инструмента или другого устройства, скрепленного с отклоняющимся звеном 6, относительно фиксированного строения пласта 14, противопоставленного фиксированному строению компоновки 4 низа бурильной колонны. В показанном варианте осуществления фиксированное строение пласта может обеспечивать направление, в котором проталкивается втулка, и поэтому нацеливается с необходимостью инерциальной привязки. Ориентацию можно привязывать относительно компоновки 4 низа бурильной колонны, например, относительно фиксированной точки компоновки 4. Дальний конец компоновки 4 низа бурильной колонны может образовать координатную систему на 0-360 градусов, представляющую ориентацию отклонения относительно фиксированной точки компоновки 4. Угловое смещение может включать в себя ориентацию (например, радиальное смещение), а также величину осевого смещения в данной ориентации, например осевое отклонение А между осью 26 отклоняющегося звена 6 и центральной осевой линией 30 компоновки 4 низа бурильной колонны, показанное на фиг. 2. Ориентация описывает направление смещения оси отклоняющегося звена относительно некоторой фиксированной точки (например, компоновки 4 низа бурильной колонны), при этом угловое смещение включает в себя осевое смещение А в данной ориентации.
Роторное управляемое бурение может включать в себя избирательное приведение в действие надлежащего исполнительного механизма (механизмов) во время вращения компоновки 4 низа бурильной колонны для получения необходимого перемещения долота 24 относительно пласта 14, например, в форме кривой или искривления в стволе 12 скважины или достижения необходимого места работ в пласте 14. Способ для определения ориентации и/или углового смещения отклоняющегося звена 6 относительно компоновки 4 низа бурильной колонны, с которой оно соединено и/или относительно пласта 14, раскрыт в данном документе.
Исполнительный механизм 34, 36 может включать в себя, без ограничения этим, систему давления текучей среды, мембранную коробку или цилиндр с перемещающимся поршнем для приложения усилия для отклонения отклоняющегося звена 6. Исполнительный механизм может включать в себя любое средство для преобразования гидравлического давления в механическое перемещение. Текучая среда, например буровой раствор, может создавать давление для привода системы давления текучей среды исполнительного механизма, например мембранной коробки, поршня и т.д., упомянутого усилия привода поворота, отклоняющего отклоняющееся звено 6.
В варианте осуществления на фиг. 1-2, несколько исполнительных механизмов 34, 36 расположены радиально для обеспечения радиального отклонения, то есть наведения, бурового долота 24, относительно компоновки 4 низа бурильной колонны. Число исполнительных механизмов, включенных в состав, зависит от конструкции и может составлять 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 20, 50 и т.д. для создания необходимого уровня управления отклонением отклоняющегося звена 6. Исполнительный механизм 34, 36 может включать в себя сбросной клапан 42, например, показанный на фиг. 3. Сбросной клапан 42 может обеспечивать втягивание исполнительного механизма посредством выпуска текучей среды. В одном варианте осуществления исполнительные механизмы выталкиваются для полного выдвижения с втулкой 38 в их состоянии привода и последующего перемещения с втулкой 38 во время сбросного состояния для проталкивания исполнительного механизма назад, и, следовательно, объемное вытеснение текучей среды должно отражать перемещение исполнительного механизма.
Сбросной клапан 42 в варианте осуществления изобретения на фиг. 3 включает в себя впускное отверстие 44, в которое подается текучая среда, например буровой раствор 16 подается через канал в компоновке 4 низа бурильной колонны, сообщающийся с каналом в бурильной колонне 8. Сбросной клапан 42 на фиг. 3 включает в себя первое выпускное отверстие 46, сообщающееся с исполнительным механизмом (например, системой давления текучей среды, мембранной коробкой или цилиндром с перемещающимся поршнем), с которой сбросной клапан 42 связан. Второе выпускное отверстие 48 сбросного клапана 42 может сообщаться с областью более низкого давления, например каналом компоновки 4 низа бурильной колонны и/или кольцевым пространством ствола 12 скважины через проход потока. Впускное отверстие 44 и первое и второе выпускные отверстия 46, 48 могут сообщаться с камерой 50, выполненной в сбросном клапане 42. В камере 50 располагается клапанный элемент 52, управляемый для возвратно-поступательного перемещения между первым положением, в котором один конец 56 клапанного элемента 52 находится в контакте с седлом, связанным с первым выпускным отверстием 46, закрывая первое выпускное отверстие 46, при этом текучая среда способна проходить из впускного отверстия 44 в камеру 50 и через второе выпускное отверстие 48 с клапанным элементом 52 в данном положении, и вторым положением, в котором противоположный конец 54 клапанного элемента 52 находится в контакте с седлом, связанным со вторым выпускным отверстием 48, закрывая второе выпускное отверстие 48, создавая возможность, при этом обеспечивая проход текучей среды из впускного отверстия 44 через камеру 50 в первое выпускное отверстие 46. Клапанный элемент 52 может также находиться в центральном положении, при этом оба выпускных отверстия 46, 48 открыты. На фиг. 3 показан сбросной клапан 42 с клапанным элементом 52, находящимся во втором положении, то есть обеспечивающим проход текучей среды в исполнительный механизм (например, поршень, мембранная коробка и т.д.). Можно использовать электромагнитный или механический исполнительный механизм устройства 58 для привода клапанного элемента 52. Когда клапанный элемент 52 перемещен в первое положение, он закрывает первое выпускное отверстие 46 и устанавливает сообщение между камерой 50 и вторым выпускным отверстием 48. Когда сообщение между камерой 50 и первым выпускным отверстием 46 прервано, что давление текучей среды в связанном с ним исполнительном механизме (например, цилиндре, мембранной коробке и т.д.) может падать с выходом текучей среды через выпускное отверстие выброса (например, второе выпускное отверстие 48 или отдельное выпускное отверстие выброса), таким образом обеспечивая возврат мембранной коробки, поршня и т.д. исполнительного механизма во втянутое положение.
Сбросной клапан 42 может переключать средство механического исполнительного механизма (например, поршень, мембранную коробку и т.д.) между источником текучей среды высокого давления (например, в состоянии "привод") и источником текучей среды пониженного давления (например, в состоянии "сброс"). Сбросной клапан 42 можно использовать в системе с замкнутым контуром или в системе с незамкнутым контуром, например, используя буровой раствор 16, как рабочую текучую среду, для привода исполнительного механизма. В состоянии сброса текучая среда может выдавливаться для выхода из поршня, мембранной коробки и т.д. исполнительного механизма 34, 36 согласно перемещению (например, втягиванию) поршня, мембранной коробки и т.д.
Исполнительные механизмы 34, 36 можно избирательно приводить в действие для наведения инструмента в необходимом направлении, обычно с привязкой относительно пласта 14. В настоящем варианте осуществления, поскольку направление 26 торца 28 бурильного инструмента в общем определяет направление проходки ствола 12 скважины, может быть необходимо определение направления 26 торца 28 бурильного инструмента или другого устройства, соединенного с отклоняющимся звеном 6. Например, система мониторинга или управления, управляющая приводом в действие исполнительных механизмов 34, 36, может использовать направление 26 торца 28 бурильного инструмента относительно компоновки 4 низа бурильной колонны и/или пласта 14.
Конкретно, может являться необходимым определение ориентации и/или углового смещения. Например, можно определять ориентацию отклоняющегося звена 6 относительно компоновки 4 низа бурильной колонны. Кроме того, или альтернативно, можно определять угловое смещение, включающее в себя ориентацию и величину смещения оси. Например, можно определять угловое смещение отклоняющегося звена 6 относительно компоновки 4 низа бурильной колонны.
В противоположность механическому измерению направления 26 нацеливания отклоняющегося звена 6 признак исполнительных механизмов 34, 36 можно использовать как функцию датчика направления. Например, давление рабочей текучей среды во время состояния сброса, то есть давление на выпуске, может являться применимым для определения направления 26 нацеливания отклоняющегося звена 6. Датчик 60 давления, например, показанный на фиг. 3, может быть связан с давлением на выпуске исполнительного механизма 34, 36. Одним способом, при котором включение датчика 60 давления в состав механизма может повлечь за собой минимальные изменения, является использование одной разводки со сбросным клапаном 42 и для энергопитания, и для сигнала от датчика 60 давления.
Давление на выпуске сброшенной рабочей текучей среды можно использовать в нескольких вариантах осуществления для определения направления нацеливания отклоняющегося звена 6. Взаимосвязь между давлением выпуска и перемещением исполнительного механизма 34, 36 может быть установлена. Конкретнее, в одном варианте осуществления, давление на выпуске из исполнительного механизма (механизмов) 34, 36 можно использовать для выведения расхода текучей среды на выходе из исполнительного механизма 34, 36. Уравнение Бернулли для сжимаемого и/или несжимаемого потока можно использовать для выведения расхода из давления на выпуске, как известно специалисту в данной области техники. То есть, в данном варианте осуществления является возможным при измерении давления, зная плотность, определять объемный расход. Измерение давления на входе может являться другим вариантом, поскольку изменение давления связано с расходом на входе, также как с расходом на выпуске. Для расхода на входе можно устанавливать один датчик для всех отклоняющих опор, коррелирующий с последовательностью открытия на отклоняющих опорах для определения, подача на какой поршень открыта. Например, приток текучей среды в исполнительный механизм может быть обусловлен разницей давления, например, между кольцевым пространством ствола 12 скважины и исполнительным механизмом 34, 36. Разница давления, плотность текучей среды и/или коэффициент расхода при истечении могут являться известными, и, следовательно, можно вывести расход. Расход может быть равен площади, умноженной на скорость потока текучей среды. Расход можно интегрировать по временному интервалу для создания временной статистики перемещения исполнительного механизма, например поршня, перемещающегося в цилиндре. Интеграл расхода является объемом текучей среды, выпущенной из исполнительного механизма 34, 36 за такой интервал времени. Поскольку объем выпущенной текучей среды, соответствующий уровню приведения в действие, может быть известен (то есть полный объем исполнительного механизма), перемещение исполнительного механизма можно рассчитать из данного набора объемных данных. Например, известный объем текучей среды, выпущенной из исполнительного механизма, можно коррелировать с рабочим объемом исполнительного механизма. Коррелирование может включать в себя расположение отклоняющегося звена 6, или конкретнее, его исполнительного механизма (механизмов) с необходимой ориентацией и/или угловым смещением и измерение соответствующего давления на выпуске или объема выпуска текучей среды, созданного на этапе расположения. Перемещение исполнительных механизмов можно объединять для образования состояния, соответствующего набору данных приведения в действие.
В известном состоянии приведения в действие (то есть перемещения исполнительных механизмов) соответствующее перемещение отклоняющегося звена 6 можно рассчитать, например, поскольку механическая взаимосвязь исполнительного механизма (механизмов) и отклоняющегося звена 6 может быть известна. Перемещение отклоняющегося звена 6, или конкретнее его отклоняющегося участка, можно привязать к ориентации и/или угловому смещению относительно компоновки 4 низа бурильной колонны и/или пласта 14. Ориентация может являться необходимой, например, когда исполнительные механизмы являются нерегулируемыми, то есть выполняющими только максимальное или минимальное отклонение отклоняющегося звена 6. В одном варианте осуществления ориентация может иметь форму радиального направления, в котором смещается ось отклоняющегося звена 6 относительно компоновки 4 низа бурильной колонны. Использование ориентации может являться необходимым, когда определение величины смещения оси не является необходимым. Например, когда отклоняющееся звено 6 способно всегда приводить звено к его максимальному уровню отклонения, мы знаем угол А смещения оси, и с помощью ориентации можем установить направления торца 28 бурильного инструмента (то есть наклон и азимут) относительно пласта 14.
Датчик 60 (датчики) давления можно также использовать для определения ориентации и/или углового смещения отклоняющегося звена 6 без интегрирования набора значений расходов выпуска. В одном варианте осуществления известную ориентацию и/или угловое смещение отклоняющегося звена 6 можно коррелировать с набором известных значений давления на выпуске. Известное давление на выпуске может являться пиковым давлением на выпуске текучей среды, выбрасываемой из исполнительного механизма, то есть в состояния сброса. Группа известных значений давления на выпуске, соответствующих известной ориентации и/или угловому смещению, может быть установлена перед использованием отклоняющегося звена в пласте 14. Измеренное давление (давления) на выпуске можно сравнивать с набором значений известного давления (давлений) на выпуске для создания соответствующей ориентации для данного измеренного давления на выпуске. В таком варианте осуществления соответствующей ориентацией является ориентация по измеренному давлению выпуска.
Поскольку исполнительные механизмы можно расположить радиально, то есть по периметру вокруг осевой линии 30 компоновки низа бурильной колонны 4, давление на выпуске из исполнительных механизмов можно использовать для определения ориентации и/или углового смещения отклоняющегося звена 6 относительно компоновки 4 низа бурильной колонны. В одном варианте осуществления пиковое давление на выпуске обусловлено давлением, требуемым для преодоления сужения потока, когда текучая среда выпускается, при втягивании исполнительного механизма, то есть поршня в цилиндр, мембранной коробки и т.д. Посредством измерения данного пикового давления на выпуске и сравнения его с известным пиковым давлением на выпуске, соответствующим известной ориентации и/или угловому смещению отклоняющегося звена 6, можно определить ориентацию и/или угловое смещение отклоняющегося звена 6, соответствующую измеренному пиковому давлению на выпуске.
В одном варианте осуществления пиковое давление на выпуске можно привязывать к исполнительному сигналу сбросного клапана 42 для определения положения (например, ориентации и/или углового смещения) отклоняющегося звена 4. Если отклоняющееся звено 6 имеет запрошенный точный угол наводки, тогда отклоняющееся звено 6 и пик давления на выпуске во время состояния сброса сдвинут по фазе на 180 градусов в данном варианте осуществления. Если отклоняющееся звено 6 находится в другом положении, пиковое давление на выпуске должно соответствовать иному положению относительно угла наводки. Угловое смещение можно дополнительно использовать для определения скорости углового смещения на временном интервале.
Вне зависимости от способа, измерения давления на выпуске можно дополнительно обрабатывать для точности. Как также показано в варианте осуществления на фиг. 3, предварительное давление на выпуске возвращается датчиком 60 давления. Давление на выпуске может зависеть от давления до и после выпускного отверстия (например, давления подачи текучей среды и давления возврата текучей среды). Давление подачи текучей среды (например, на впускном отверстии 44) и/или давление текучей среды в обратную сторону (то есть ниже по потоку от второго выпускного отверстия 48) может быть измерено и удалено из давления на выпуске, измеренного датчиком 60 давления. Давление текучей среды в обратную сторону может являться давлением в кольцевом пространстве между компоновкой 4 низа бурильной колонны и стволом 12 скважины. Такие способы также можно использовать, если удар отклоняющегося звена 6 вызывает пиковое давление на выпуске исполнительного механизма (например, поршня в цилиндре, мембранной коробки и т.д.) которое можно измерить даже со сбросным клапаном 42, включенным в работу в состоянии привода.
После определения направления (то есть ориентации и/или углового смещения) отклоняющегося звена 6 относительно компоновки 4 низа бурильной колонны может быть определено направление относительно пласта 14 или, более конкретно, наклон и азимут отклоняющегося звена 6 относительно пласта. Это может быть необходимым, когда компоновка 4 низа бурильной колонны вращается, например, как в роторном управляемом бурении. Отклоняющееся звено 6 может нутировать относительно оси 30 компоновки низа бурильной колонны 4 во время использования, поскольку компоновка 4 также вращается.
Наклон и азимут отклоняющегося звена 6, например торца 28 бурильного инструмента, могут быть определены посредством наклона и азимута компоновки низа бурильной колонны 4. Один, не являющийся ограничивающим, способ предоставления данных наклона и азимута заключается в размещении соответствующих известных измерительных устройств в компоновке 4 низа бурильной колонны. Ориентацию и/или угловое смещение отклоняющегося звена 6 относительно компоновки 4 низа бурильной колонны можно использовать для установки наклона и азимута отклоняющегося звена 6 относительно пласта 14. В одном варианте осуществления втулка может проходить между нулевым отклонением (то есть соосно с осью 30 компоновки 4 низа бурильной колонны, к максимальному отклонению A, как показано на фиг. 2. Определенную ориентацию (то есть нацеливание на определенное радиальное направление отклоняющегося звена 6) можно использовать для установки наклона и азимута отклоняющегося звена 6 относительно пласта 14. Данная установка может включать в себя геометрические расчеты, известные в уровне техники. Направление отклоняющегося звена 6 (то есть ориентация, угловое смещение и/или наклон и азимут) могут рассчитываться в режиме реального времени.
Амплитуда сигнала давления может зависеть от свойств текучей среды, то есть бурового раствора. В варианте осуществления, когда все исполнительные механизмы 34, 36 принимают одну текучую среду, ориентацию можно определять, даже если величина поворота является неизвестной, подходящими логометрическими способами.
Угловое смещение включает в себя как ориентацию, так и степень смещения оси, и его можно использовать с наклоном и азимутом компоновки низа бурильной колонны 4 относительно пласта 14 для установки наклона и азимута отклоняющегося звена 6 относительно пласта 14. Наклон и азимут отклоняющегося звена 6 (то есть направление 26 оси торца 28 бурового долота 24 бурильного инструмента) можно, следовательно, определить без непосредственного измерения углов смещения между отклоняющимся звеном 6 и компоновкой 4 низа бурильной колонны.
Любую комбинация или все вышеупомянутые этапы можно выполнять с помощью компьютера. Данные состояния исполнительного механизма (например, давления), полученные любым способом, описанным выше, могут попадать под воздействие помех. Ясно, что фильтрование или другие способы обработки сигнала можно использовать, если необходимо. Другим подходом регулирования качества сигнала, например данных давления на выпуске, является развитие измерения качества сигнала. Такая схема может использовать измерения, такие как соотношения сигнала и шума или сравнение величины измеренного сигнала относительно подвижного среднего сигнала для определения, обуславливает ли некоторый быстрый переход недействительность отобранных данных. Можно выводить логику (используя, например, непрерывную логику), которая должна применять взвешенные значения к сигналу, на основе качества сигнала, так что данные неточных сигналов можно игнорировать, и система возвращается к управлению внешнего цикла.
Раскрыты многочисленные варианты осуществления и их альтернативы. Хотя приведенное выше описание включает в себя считающиеся лучшими варианты изобретения, предложенные названными изобретателями, описаны не все возможные альтернативы. По этой причине объем и ограничения настоящего изобретения не подлежат установлению приведенным выше описанием, но заданы и объяснены в прилагаемой формуле изобретения.
Изобретение относится к способу определения направления торца бурильного инструмента. Техническим результатом является повышение точности определения ориентации и углового смещения отклоняющегося звена компоновки низа бурильной колонны. Давление на выпуске, по меньшей мере, из одного исполнительного механизма, способного отклонять звено компоновки низа бурильной колонны, используют для определения направления отклоняющегося звена. В одном варианте осуществления известное давление на выпуске коррелируют с известной ориентацией и/или угловым смещением и измеренное давление на выпуске сравнивают с известным давлением на выпуске для определения ориентации и/или углового смещения. В другом варианте осуществления расход текучей среды, выпускаемой из исполнительного механизма, выводят из давления на выпуске. Расход на выпуске затем используют для расчета набора данных о состоянии параметров срабатывания, которые обеспечивают определение углов смещения отклоняющегося звена. Ориентацию и/или угловое смещение относительно компоновки низа бурильной колонны можно установить по наклону и азимуту относительно пласта. 3 н. и 15 з.п. ф-лы, 3 ил.
1. Способ определения ориентации отклоняющегося звена, соединенного с компоновкой низа бурильной колонны, содержащий следующие стадии:
создание множества радиально расположенных исполнительных механизмов, приводимых в действие текучей средой, для отклонения отклоняющегося звена;
корреляция известной ориентации отклоняющегося звена относительно компоновки низа бурильной колонны с набором известных значений давления на выпуске множества радиально расположенных исполнительных механизмов;
измерение давления на выпуске текучей среды, по меньшей мере, одного из множества радиально расположенных исполнительных механизмов, для создания набора значений давления на выпуске;
сравнение набора значений давления на выпуске и скоррелированного набора известных значений давления на выпуске для определения ориентации отклоняющегося звена относительно компоновки низа бурильной колонны.
2. Способ по п.1, дополнительно содержащий обеспечение наклона и азимута компоновки низа бурильной колонны относительно пласта и установку наклона и азимута отклоняющегося звена относительно пласта посредством ориентации отклоняющегося звена относительно компоновки низа бурильной колонны и наклона и азимута компоновки низа бурильной колонны относительно пласта.
3. Способ по п.1, дополнительно содержащий подачу текучей среды, являющейся буровым раствором, из канала компоновки низа бурильной колонны.
4. Способ по п.3, дополнительно содержащий измерение, по меньшей мере, одного из давления подачи текучей среды и давления текучей среды в обратную сторону локально на множестве радиально расположенных исполнительных механизмов и удаление любой потери давления, связанной с, по меньшей мере, одним из давления подачи текучей среды и давления текучей среды в обратную сторону от давления на выпуске для создания набора значений давления на выпуске.
5. Способ по п.1, в котором набор известных значений давления на выпуске является набором известных пиковых значений давления на выпуске.
6. Способ определения углового смещения отклоняющегося звена, соединенного с компоновкой низа бурильной колонны, содержащий следующие стадии:
создание множества радиально расположенных исполнительных механизмов, приводимых в действие текучей средой, для отклонения отклоняющегося звена;
корреляция известного углового смещения отклоняющегося звена относительно компоновки низа бурильной колонны с набором известных значений давления на выпуске множества радиально расположенных исполнительных механизмов;
измерение давления на выпуске текучей среды, по меньшей мере, одного из множества радиально расположенных исполнительных механизмов, для создания набора значений давления на выпуске;
сравнение набора значений давления на выпуске и скоррелированного набора известных значений давления на выпуске для определения углового смещения отклоняющегося звена относительно компоновки низа бурильной колонны.
7. Способ по п.6, дополнительно содержащий обеспечение наклона и азимута компоновки низа бурильной колонны относительно пласта и установку наклона и азимута отклоняющегося звена относительно пласта посредством углового смещения отклоняющегося звена относительно компоновки низа бурильной колонны и наклона и азимута компоновки низа бурильной колонны относительно пласта.
8. Способ по п.6, дополнительно содержащий подачу текучей среды, являющейся буровым раствором, из канала компоновки низа бурильной колонны.
9. Способ по п.8, дополнительно содержащий измерение, по меньшей мере, одного из давления подачи текучей среды и давления текучей среды в обратную сторону локально на множестве радиально расположенных исполнительных механизмов и удаление любой потери давления, связанной с, по меньшей мере, одним из давления подачи текучей среды и давления текучей среды в обратную сторону от давления текучей среды на выпуске для создания набора значений давления на выпуске.
10. Способ по п.6, в котором набор известных значений давления на выпуске является набором известных пиковых значений давления на выпуске.
11. Способ определения углового смещения отклоняющегося звена, соединенного с компоновкой низа бурильной колонны, содержащий следующие стадии:
обеспечение множества радиально расположенных исполнительных механизмов, приводимых в действие текучей средой, для отклонения отклоняющегося звена;
измерение давления выпуска текучей среды, по меньшей мере, одного из множества радиально расположенных исполнительных механизмов для создания набора значений давления выпуска;
выведение набора значений расхода на выпуске из набора значений давления на выпуске;
расчет данных набора данных о состоянии параметров срабатывания для множества радиально расположенных исполнительных механизмов из набора значений расхода на выпуске; и
определение углового смещения отклоняющегося звена относительно компоновки низа бурильной колонны из набора данных о состоянии параметров срабатывания множества радиально расположенных исполнительных механизмов.
12. Способ по п.11, в котором этап расчета набора данных о состоянии параметров срабатывания содержит интегрирование набора значений расхода на выпуске на временном интервале.
13. Способ по п.11, в котором этап расчет набора данных о состоянии параметров срабатывания содержит интегрирование набора значений расхода на выпуске на временном интервале для создания набора объемных данных, корреляцию известного объема выпущенной текучей среды с известным смещением исполнительного механизма и создание набора данных о состоянии параметров срабатывания посредством набора объемных данных и известного объема выпущенной текучей среды, скоррелированных с известным смещением исполнительного механизма.
14. Способ по п.11, дополнительно содержащий расчет скорости изменения углового смещения из углового смещения.
15. Способ по п.11, дополнительно содержащий обеспечение наклона и азимута компоновки низа бурильной колонны относительно пласта и установку наклона и азимута отклоняющегося звена относительно пласта посредством углового смещения отклоняющегося звена относительно компоновки низа бурильной колонны и наклона и азимута компоновки низа бурильной колонны относительно пласта.
16. Способ по п.11, дополнительно содержащий подачу текучей среды, являющейся буровым раствором, из канала компоновки низа бурильной колонны.
17. Способ по п.16, дополнительно содержащий измерение, по меньшей мере, одного из давления подачи текучей среды и давления текучей среды в обратную сторону локально на множестве радиально расположенных исполнительных механизмов и удаление любой потери давления, связанной с, по меньшей мере, одним из давления подачи текучей среды и давления текучей среды в обратную сторону от давления на выпуске для создания набора значений давления на выпуске.
18. Способ по п.11, в котором набор известных значений давления на выпуске является набором известных пиковых значений давления на выпуске.
| US 3743034 А, 03.07.1973 | |||
| КОМПОНОВКА НИЗА БУРИЛЬНОЙ КОЛОННЫ | 1996 |
|
RU2112129C1 |
| СПОСОБ БУРЕНИЯ СКВАЖИН И ОДНОВРЕМЕННОГО НАПРАВЛЕНИЯ БУРОВОГО ДОЛОТА АКТИВНО КОНТРОЛИРУЕМЫМ ВРАЩАТЕЛЬНЫМ НАПРАВЛЯЕМЫМ СКВАЖИННЫМ БУРОВЫМ УСТРОЙСТВОМ И ВРАЩАТЕЛЬНОЕ НАПРАВЛЯЕМОЕ СКВАЖИННОЕ БУРОВОЕ УСТРОЙСТВО | 1999 |
|
RU2229012C2 |
| КОМПОНОВКА НИЗА БУРИЛЬНОЙ КОЛОННЫ ДЛЯ НАПРАВЛЕННОГО БУРЕНИЯ СКВАЖИНЫ | 1998 |
|
RU2148696C1 |
| RU 2055180 С1, 27.02.1996 | |||
| WO 03052237 А1, 26.06.2003. | |||

