Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к картированию и бурению скважин и, в частности, к системам и способам измерения и прогнозирования геометрии сложных скважин.
Уровень техники
Скважины (обычно обозначаемые в англоязычной терминологии как «boreholes», «wellbores» или «drill holes») выполняют для различных целей, в том числе для разведочного бурения с целью определения местоположения подземных залежей различных полезных ископаемых, добычи полезных ископаемых и проектирования с целью строительства новых подземных коммуникаций. Зачастую имеет место ошибочное представление, что все скважины вертикально выровнены относительно буровой установки, однако многие применения требуют бурения скважин, которые имеют геометрию с отклонением от вертикали или имеют горизонтальную ориентацию. К известным технологиям, применяемым для бурения горизонтальных, отклоненных от вертикали и других геометрически сложных скважин, относится наклонно-направленное бурение. К наклонно-направленному бурению обычно относят процесс бурения скважины, характерный тем, что курс скважины в земле имеет направление, отличное от вертикального, то есть оси образуют угол с вертикальной плоскостью (называемый «отклонением от вертикали») и направлены в азимутальной плоскости.
Типовые технологии наклонно-направленного бурения обычно реализуют с применением бурового устройства, которым проталкивают или проводят последовательно соединенные бурильные трубы с направляемым буровым долотом, установленным на дальнем конце указанных труб, в результате чего формируют геометрию сложной скважины. При разведке подземных залежей углеводородов, например нефти и природного газа, и при их добыче наклонно-направленную скважину обычно пробуривают вращающимся буровым долотом, закрепленным на конце компоновки низа бурильной колонны КНБК. Направляемая КНБК может содержать, например, гидравлический забойный двигатель ГЗД (PDM, от англ. positive displacement motor), также называемый «забойным двигателем», утяжеленные бурильные трубы, расширители, амортизаторы и инструменты для расширения скважины. Для контроля изгиба КНБК и направления долота по требуемой траектории (обеспечения требуемого угла наклона и азимута) к КНБК могут прикреплять стабилизатор. КНБК, в свою очередь, прикрепляют к низу трубного узла, который обычно содержит трубное сочленение или относительно гибкую трубу, сворачиваемую в бухту, также называемую «колтюбингом». Такая система наклонно-направленного бурения, представляющая собой функционально взаимосвязанные трубы, буровое долото и КНБК, обычно называется «бурильной колонной». При использовании в бурильной колонне трубного сочленения буровое долото поворачивают путем вращения указанного сочленения с поверхности, или при помощи забойного двигателя, предусмотренного в КНБК. В то же время, бурильные колонны, содержащие колтюбинги, обычно вращают буровое долото посредством забойного двигателя, предусмотренного в КНБК.
Независимо от профиля скважины, будь он горизонтальным, наклонным, вертикальным или любым другим допустимым сочетанием перечисленных конфигураций - для обеспечения оптимальной добычи углеводородов из месторождения траектория скважины должна быть картирована максимально возможно точно. Путь или траекторию скважины принято определять на основе серии измерений направления и угла наклона скважины (D&l - от английского direction and inclination), например азимута и угла наклона, в отдельных местоположениях («точках инклинометрии») вдоль пути скважины. По результатам указанных угловых измерений, с учетом известной длины бурильной колонны, можно построить теоретическую модель траектории скважины. Азимут и угол наклона можно измерить посредством датчиков инклинометрии, расположенных вдоль бурильной колонны. На результаты этих измерений могут влиять случайные изменения состояния бурильной колонны и условий бурения. Например, часть колонны, к которой прикреплены датчики, может изогнуться или «перекоситься», что может привести к тому, что ось скважины не обязательно будет ориентирована в том же направлении, что и ось инструмента с датчиками.
В рамках существующей практики бурения кривизну скважины определяют путем расчета кривизны между точками (пунктами) инклинометрии на основе данных, измеряемых забойным инклинометром. Наиболее широко известным способом определения траектории скважины является метод минимальной кривизны (Minimum Curvature Method), описанный, например, в работе «A Compendium of Directional Calculations Based on the Minimum Curvature Method», by S.J. Sawaryn и J.T. Thorogood, SPE Annual Technical Conference and Exhibition) Denver, Colorado, 5-8 October (2003), содержание которой во всей полноте включено в настоящую заявку посредством ссылки. Применение указанного способа подразумевает представление траектории скважины в виде последовательности тангенциальных векторов, соединенных дугой окружности. Для представления других объектов, например соседних скважин, сборных промысловых трубопроводов, геологических целевых объектов и разрывов, могут быть использованы множества других точек, линий и плоскостей. Взаимосвязи между указанными элементами имеют простые геометрические интерпретации, что позволяет осуществлять их математическую обработку.
Данные о точном положении скважины важны при определении расстояния, отделяющего указанную скважину от соседних скважин, уточнении границ нефтяных и газовых залежей, расчете объемов нефти в пласте-коллекторе. Следует отметить, что в процессе осуществления буровых операций путь буровых инструментов фактически проходит не вдоль единственной непрерывной кривой, а состоит из серии кривых различной кривизны. При расчете положения скважины по методу минимальной кривизны изменения траектории скважины между точками инклинометрии не учитываются. Таким образом, существующие типовые способы определения траектории скважины не обеспечивают наивысшую точность определения положения и кривизны скважины. Кроме того, при коррекции несоосности измерений, произведенных в пунктах инклинометрии, не учитывают несоосность буровых инструментов относительно скважины сложной формы. В рамках существующих технологий несоосность скважины корректируют на основе формы скважины с минимальной кривизной, однако применение данных технологий дает неудовлетворительные результаты в отношении компенсации несоосности скважины.
Таким образом, существует потребность более точного определения пути скважины между пунктами инклинометрии и более точного расчета положения скважины.
Раскрытие изобретения
Согласно одному из аспектов настоящего изобретения, представлен способ определения траектории скважины. Указанный способ содержит: получение данных, характеризующих один или более параметров бурения между по меньшей мере двумя точками инклинометрии; усреднение полученных данных за заданные шаги приращения между указанными по меньшей мере двумя точками инклинометрии; расчет исходя из по меньшей мере указанных усредненных данных прогнозируемой реакции бурильной колонны для каждого из заданных шагов приращения; определение исходя из по меньшей мере указанной прогнозируемой реакции бурильной колонны изменения угла наклона и азимута для каждого из заданных шагов приращения; формирование прогнозируемой траектории скважины исходя из по меньшей мере указанного изменения угла наклона и азимута; сравнение указанной прогнозируемой траектории скважины с измеренной траекторией скважины; и, если результаты указанного сравнения приемлемы, определение вероятного положения скважины исходя из по меньшей мере указанного изменения угла наклона и азимута для каждого из заданных шагов приращения.
Согласно другому аспекту настоящего изобретения раскрыт постоянный машиночитаемый носитель, содержащий компьютерную программу с набором команд, причем указанный набор команд выполнен с возможностью вызывать, при исполнении одним или более контроллерами, следующие действия: усреднение набора измеренных данных за заданные шаги приращения между по меньшей мере двумя точками инклинометрии, причем указанный набор данных характеризует множество параметров бурения; расчет исходя из по меньшей мере указанного набора усредненных данных прогнозируемой реакции бурильной колонны для каждого заданного шага приращения, определение исходя из по меньшей мере указанной прогнозируемой реакции бурильной колонны изменения угла наклона и азимута для каждого заданного шага приращения; формирование прогнозируемой траектории скважины исходя из по меньшей мере указанного изменения угла наклона и азимута; сравнение указанной прогнозируемой траектории скважины с измеренной траекторией скважины; если результаты указанного сравнения неприемлемы, перерасчет указанной прогнозируемой реакции бурильной колонны с применением поправочного коэффициента, учитывающего систематическую погрешность, и повторение указанных действий по определению, формированию и сравнению; и если результаты указанного сравнения приемлемы, определение вероятного положения скважины исходя из указанного изменения угла наклона и азимута для каждого заданного шага приращения.
Согласно другому аспекту настоящего изобретения, раскрыта система прогнозирования пути сложной скважины. Скважина может быть пробурена системой наклонно-направленного бурения, имеющей по меньшей мере один датчик, функционально соединенный с бурильной колонной, содержащей компоновку низа бурильной колонны КНБК и буровое долото. Указанная система содержит устройство ввода для приема входных данных от пользователя, контроллер и запоминающее устройство для хранения команд. Указанные команды, при их исполнении контроллером, вызывают выполнение указанным контроллером следующих действий: прием от указанного по меньшей мере одного датчика результатов измерений, характеризующих множество параметров бурения между первой и второй точками инклинометрии; усреднение принятых результатов измерений за каждый из множества назначенных пользователем шагов приращения глубины между указанными первой и второй точками инклинометрии; расчет исходя из по меньшей мере указанных усредненных результатов измерений прогнозируемой реакции КНБК и прогнозируемой реакции бурового долота для каждого из указанных шагов приращения глубины; определение исходя из по меньшей мере указанной прогнозируемой реакции КНБК и указанной прогнозируемой реакции бурового долота изменения угла наклона и азимута для каждого из указанных шагов приращения глубины; формирование прогнозируемой траектории скважины в указанной первой точке инклинометрии исходя из по меньшей мере указанного изменения угла наклона и азимута; сравнение указанной прогнозируемой траектории скважины с измеренной траекторией скважины в указанной второй точке инклинометрии; и если результаты сравнения приемлемы, определение вероятного положения скважины исходя из указанного изменения угла наклона и азимута для каждого из указанных шагов приращения глубины.
Вышеприведенное раскрытие настоящего изобретения не охватывает все варианты осуществления изобретения или все аспекты изобретения. Напротив, в вышеприведенном раскрытии изобретения приведены лишь иллюстративные примеры некоторых новых аспектов и признаков, раскрытых в данном документе. Вышеупомянутые преимущества и признаки, а также другие преимущества и признаки настоящего изобретения становятся понятны из нижеследующего подробного описания вариантов осуществления настоящего изобретения и предпочтительных вариантов осуществления настоящего изобретения, рассматриваемых во взаимосвязи с прилагаемыми чертежами и формулой настоящего изобретения.
Краткое описание чертежей
На фиг. 1 показано схематическое изображение примера буровой системы в соответствии с аспектами настоящего изобретения.
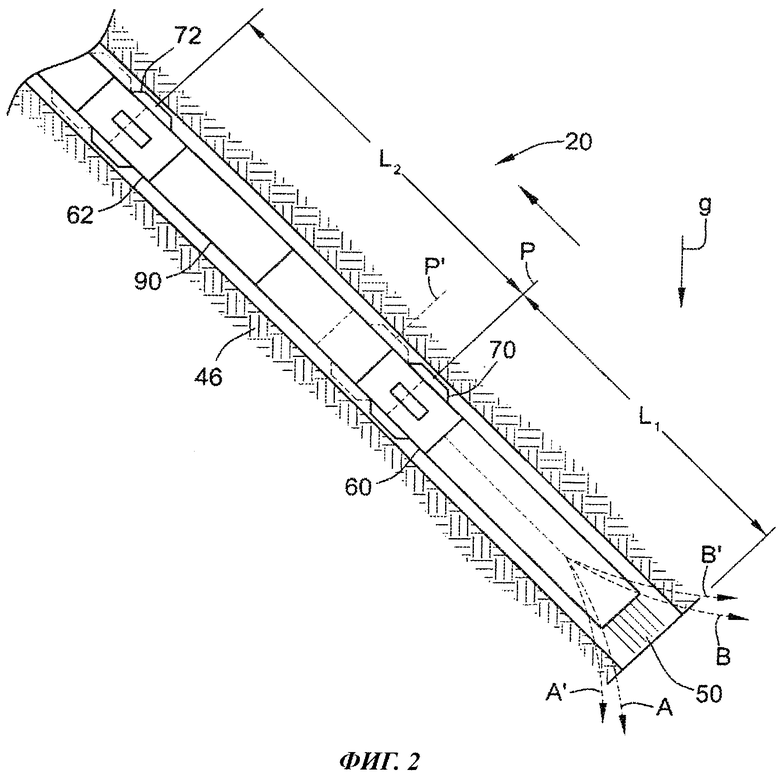
На фиг. 2 показано схематическое изображение примера компоновки низа бурильной колонны КНБК в соответствии с аспектами настоящего изобретения.
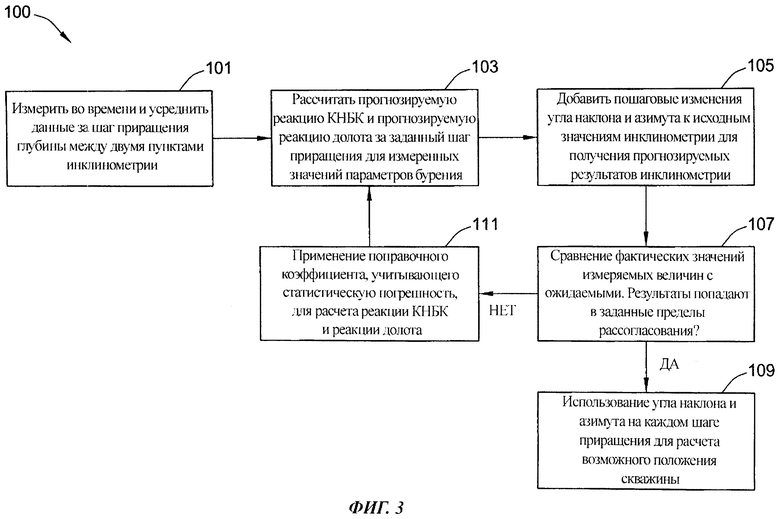
На фиг. 3 показана блок-схема примера способа или алгоритма, соответствующего командам, которые могут быть исполнены, например, контроллером или процессором в соответствии с аспектами настоящего изобретения.
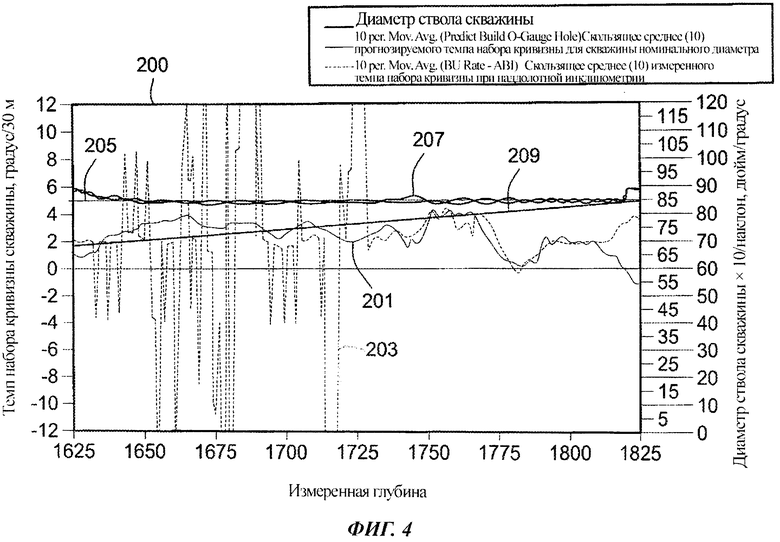
На фиг. 4 показан график, иллюстрирующий на различных измеренных глубинах рассчитанную скорость бурения для примера вращающейся направляемой установки и рассчитанную скорость бурения при использовании датчика наклона, расположенного вблизи долота.
Настоящее изобретение может быть подвержено разнообразным модификациям и изменениям, при этом конкретные варианты его осуществления, подробно описанные в данной заявке и проиллюстрированные на прилагаемых чертежах, приведены только в качестве примеров. Следует понимать, что настоящее изобретение никоим образом не ограничено конкретными вариантами его осуществления, приведенными в данной заявке. Напротив, настоящее изобретение охватывает все модификации, эквиваленты и варианты, находящиеся в рамках объема настоящего изобретения, ограниченного прилагаемой формулой настоящего изобретения.
Осуществление изобретения
Осуществление настоящего изобретения может принимать различные формы. Варианты осуществления настоящего изобретения проиллюстрированы на прилагаемых чертежах и подробно описаны в данной заявке, однако приведенное описание настоящего изобретения носит пояснительный характер и никоим образом не ограничивает сущность настоящего изобретения проиллюстрированными вариантами его осуществления.
На прилагаемых чертежах сходные элементы обозначены сходными номерами позиций на нескольких видах. На фиг. 1 показан пример системы наклонно-направленного бурения, в целом обозначенной позицией 10, в соответствии с аспектами настоящего изобретения. Большинство раскрытых принципов изобретения описаны со ссылкой на бурильные операции, направленные на разведку месторождений и добычу залегающих под землей углеводородов, например нефти и природного газа. Однако раскрытые принципы изобретения не ограничены указанной областью применения и могут быть использованы при выполнении других бурильных операций. В связи с этим аспекты настоящего изобретения не обязательно ограничены конфигурациями и элементами, приведенными на фиг. 1 и 2. Кроме того, следует понимать, что указанные чертежи необязательно представлены в масштабе, а приведены исключительно в пояснительных целях; таким образом, настоящее изобретение не ограничено абсолютными и относительными размерами и ориентациями, приведенными на чертежах. Дополнительная информация касательно систем наклонно-направленного бурения содержится, например, в опубликованной патентной заявке США 2010/0259415 А1 «Method and System for Predicting Performance of a Drilling System Having Muitipie Cutting Structures» за авторством Michael Strachan и др., содержание которой во всей полноте включено в настоящий документ посредством ссылки.
На фиг. 1 показан пример системы 10 наклонно-направленного бурения, содержащей башню или «вышку» 11, как она наиболее часто обозначается в области техники, укрепленную посредством пола 12 вышки. Пол 12 вышки служит опорой для поворотного стола 14, приводимого в движение с требуемой скоростью вращения, например, через систему с цепной передачей посредством работы первичного двигателя (не показан). В свою очередь, поворотный стол 14 передает необходимое вращающее усилие к бурильной колонне 20. Бурильная колонна 20, содержащая участок 24 бурильной трубы, проходит вниз от поворотного стола 14 в наклонно-направленную скважину 26. Как показано на чертежах, скважина 26 может проходить вдоль многомерного пути или «траектории». Трехмерное направление низа 54 скважины 26, показанной на фиг.1, обозначено вектором 52.
К дальнему, забойному концу бурильной колонны 20 прикреплено буровое долото 50. При вращении, например посредством поворотного стола 14, долото 50 разбивает и в целом измельчает геологическую формацию 46. Бурильная колонна 20 соединена с «лебедочным» спускоподъемным устройством 30, например, через ведущую бурильную трубу 21, шарнирный механизм 28 и линию 29 через систему шкивов (не показана). Лебедка 30 может содержать различные компоненты, в том числе барабан, один или более двигателей, редуктор, главный тормоз и дополнительный тормоз. В процессе бурения в некоторых вариантах осуществления изобретения через лебедку 30 можно регулировать нагрузку на долото 50 и скорость погружения бурильной колонны 20 вглубь скважины 26. Принцип работы лебедки 30 известен, поэтому его подробное описание в данной заявке не приведено.
Во время бурильных операций подходящая буровая текучая среда (обычно обозначаемая в данной области техники как «буровой раствор») 31 может циркулировать по контуру из отстойника 32 в скважину 26 через бурильную колонну 20 под давлением, нагнетаемым гидравлическим насосом 34 бурового раствора. Буровая текучая среда 31 может содержать буровые растворы на водной основе (WBM, от англ. water-based mud), обычно содержащие композицию на основе воды и глины, буровой раствор на нефтяной основе (ОВМ, от англ. oil-based mud), в котором базовой текучей средой является нефтепродукт, например дизельное топливо, буровой раствор на синтетической основе (SBM, от англ. synthetic-based mud), в котором базовой текучей средой является синтетическое масло, а также газосодержащие буровые текучие среды. Буровая текучая среда 31 поступает от насоса 34 бурового раствора в бурильную колонну 20 по каналу 38 текучей среды (обычно называемому «трубопроводом бурового раствора») и ведущей буровой трубе 21. Буровая текучая среда 31 выходит у низа скважины 54 через отверстие в буровом долоте 54 и циркулирует вверх по стволу скважины по направлению к поверхности через кольцевое пространство 27 между бурильной колонной 20 и стенкой скважины 26. Когда буровая текучая среда 31 достигает поворотного стола 14, она вытекает через возвратную линию 35 в отстойник 32. На поверхности скважины 26 надлежащим образом размещено множество наземных датчиков 48, которые функционируют независимо или совместно с забойными датчиками 70, 72, размещенными внутри скважины 26, для обеспечения информации о различных относящихся к бурению параметрах, например о расходе буровой текучей среды, нагрузке на долото, нагрузке на крюк и так далее, как подробно описано ниже.
Сигналы от наземных и забойных датчиков и устройств может принимать наземный блок 40 управления через датчик или приемник 43, который может быть установлен на линии 38 текучей среды. Наземный блок 40 управления можно быть выполнен с возможностью обработки указанных сигналов в соответствии с запрограммированными командами, передаваемыми наземному блоку 40 управления. Наземный блок 40 управления может представлять оператору требуемые параметры бурения и другую информацию посредством одного или нескольких устройств 42 вывода, например дисплея, компьютерного монитора, громкоговорителей, индикаторных лампочек и так далее, которые могут использоваться оператором для контроля процесса бурения. Наземный блок 40 управления может содержать компьютер, запоминающее устройство для хранения данных, устройство для записи данных и прочие известные внешние устройства, а также внешние устройства, которые будут разработаны в будущем. Кроме того, наземный блок 40 управления может содержать модели, а также может обрабатывать данные в соответствии с запрограммированными командами, реагировать на команды пользователя, вводимые через подходящее устройство 44 ввода, которое по своей сути может представлять собой клавиатуру, сенсорный экран, микрофон, компьютерную мышь, джойстик и другие подобные устройства.
В некоторых вариантах осуществления настоящего изобретения вращающееся буровое долото 50 прикреплено к дальнему концу управляемой компоновки 22 низа бурильной колонны КНБК. В проиллюстрированном варианте осуществления изобретения КНБК 22 прикреплена между буровым долотом 50 и участком 24 бурильной трубы бурильной колонны 20. КНБК 22 может содержать показанную на фиг.1 систему 58 измерения в процессе бурения (MWD, от англ. measurement while drilling), датчики которой передают информацию о формации 46 и параметрах бурения скважины. MWD-датчики в КНБК 22 могут содержать, но не ограничены таковыми, устройство для измерения удельного электрического сопротивления формации вблизи бурового долота, устройство гамма-излучения для измерения интенсивности гамма-излучения формации, устройства для определения угла наклона и азимута бурильной колонны, а также датчики давления для измерения давления буровой текучей среды в скважине. MWD-средства также могут содержать дополнительные/альтернативные датчики для измерения упругих волн, вибрации, крутящего момента, телеметрических сигналов и так далее. Вышеупомянутые устройства могут передавать данные в забойный передатчик 33, который, в свою очередь, передает указанные данные вверх по стволу скважины в наземный блок 40 управления. В некоторых вариантах осуществления изобретения КНБК 22 также может содержать систему каротажа в процессе бурения (LWD, от англ. logging while drilling).
В некоторых вариантах осуществления изобретения для передачи данных от забойных датчиков и устройств в процессе бурения могут применять технологию телеметрии по гидроимпульсному каналу связи. Примеры способов и устройств, реализующих телеметрию по гидроимпульсному каналу связи, раскрыты в патенте США 7106210 В2 за авторством Christopher A. Golla и др., содержание которого во всей полноте включено в настоящую заявку посредством ссылки. К другим известным способам осуществления телеметрии, которые могут быть использованы без выхода за пределы сущности настоящего изобретения, среди прочих относятся электромагнитная телеметрия, акустическая телеметрия, проводная телеметрия по бурильной колонне.
Приемник 43, расположенный в линии 38 подачи бурового раствора, детектирует импульсы в буровом растворе, отвечающие данным, поступающим от забойного передатчика 33. Приемник 43, в свою очередь, генерирует электрические сигналы в ответ на изменения давления бурового раствора и передает указанные сигналы в наземный блок 40 управления. Альтернативно, могут применяться другие технологии телеметрии, например электромагнитная и/или акустическая или любые другие подходящие известные технологии или технологии телеметрии, которые будут разработаны в будущем. Например, для передачи данных между наземными и забойными устройствами может быть использована бурильная труба с жестким кабелем. Кроме того, перечисленные технологии могут использоваться в любых сочетаниях. Как показано на фиг. 1, передача данных осуществляется между забойными приборами и приемопередатчиком 80 при помощи любой упомянутой технологии передачи, например технологии телеметрии по гидроимпульсному каналу связи. Это обеспечивает возможность двунаправленной передачи данных между наземным блоком 40 управления и забойными инструментами, описанными ниже.
Согласно аспектам настоящего изобретения КНБК 22 обеспечивает передачу на долото 50 требуемого усилия для пробивания сквозь формацию 46 (так называемой «нагрузки на долото»), и обеспечивает управление направлением бурения скважины 26. В вариантах осуществления изобретения, проиллюстрированных на фиг. 1 и 2, КНБК 22 может содержать буровой двигатель 90, а также первый и второй стабилизаторы 60 и 62, отстоящие друг от друга в продольном направлении. По меньшей мере один из стабилизаторов 60, 62 может представлять собой регулируемый стабилизатор, способствующий управлению направлением бурения скважины 26. Для регулирования угла между КНБК 22 и осью скважины 26 в КНБК 22 направляемой системы 10 наклонно-направленного бурения могут применяться дополнительные радиально регулируемые стабилизаторы. В отличие от типовых стабилизаторов с фиксированным диаметром радиально регулируемые стабилизаторы обеспечивают возможность регулировки направления в широком диапазоне. Возможность такого регулирования позволяет значительно сократить время бурения, так как позволяет регулировать конфигурацию КНБК 22 внутри скважины, вместо того чтобы извлекать КНБК 22 на поверхность для осуществления каких-либо изменений. Тем не менее, даже указанный радиально регулируемый стабилизатор позволяет регулировать направление скважины лишь в ограниченном диапазоне. Дополнительная информация с описанием регулируемых стабилизаторов и применения их в системах наклонно-направленного бурения содержится в публикации патентной заявки США 2011/0031023 А1 «Borehole Drilling Apparatus, Systems, and Methods» за авторством Clive D. Menezes и др., содержание которой во всей полноте включено в настоящую заявку посредством ссылки.
Как показано в варианте осуществления на фиг. 2, расстояние между буровым долотом 50 и первым стабилизатором 60, обозначенное как L1, может быть фактором, определяющим изгибные характеристики КНБК 22. Аналогично, расстояние между первым стабилизатором 60 и вторым стабилизатором 62, обозначенное как L2, может быть другим фактором, определяющим изгибные характеристики КНБК 22. Что касается первого стабилизатора 60, отклонение бурового долота 50 КНБК 22 является нелинейной функцией расстояния L1, так как даже относительно небольшое изменение расстояния L1 может приводить к значительным изменениям изгибных характеристик КНБК 22. За счет радиально подвижных лопаток стабилизатора, угол заваливания или угол подъема, например А или В, может быть задан долотом 50 при нахождении указанного стабилизатора в положении Р. Посредством передвижения стабилизатора 60 по оси из точки Р в точку Р′ можно увеличить отклонение долота 50 с А до А′ или с В до В′. Согласно некоторым аспектам раскрытых принципов изобретения применение стабилизатора, регулируемого в осевом и радиальном направлениях, может существенно расширить диапазон регулировки направления скважины, тем самым позволяя сэкономить время, которое потребовалось бы на изменение конфигурации КНБК 22. В некоторых вариантах осуществления изобретения стабилизатор выполнен с возможностью осевого перемещения. Положение и регулировка второго стабилизатора 62 обеспечивают дополнительную гибкость регулирования КНБК 22 для достижения требуемого изгиба КНБК 22, требуемых кривизны и направления скважины. Таким образом, функциональность второго стабилизатора 62 может быть идентичной функциональности первого стабилизатора 60. Хотя и проиллюстрирована в двух измерениях, надлежащая регулировка КНБК 22 также может обеспечивать поворот КНБК 22 по трем измерениям.
В данной заявке термин «траектория», как правило, относится к пути скважины. В данной заявке термин «положение», как правило, относится к положению вдоль пути скважины, которое может быть отсчитано, например, от некоторой вертикальной и/или горизонтальной линии приведения (обычно от положения устья скважины и базисной высотной отметки), или может быть получена путем измерения с применением технологий инерционных измерений. В данной заявке термин «азимут», как правило, относится к направлению углового курса (или угловому измерению) в сферической системе координат, относительно опорного направления, например направления на север, в положении измерения. Кроме того, в рамках настоящего изобретения, термином «угол наклона» обозначается угловое отклонение скважины от вертикали, обычно отсчитываемое от направления силы тяжести. В данной заявке словосочетание «измеренная глубина», как правило, относится к расстоянию, измеренному от опорного местоположения на поверхности до положения вдоль пути скважины. В качестве примера, не имеющего ограничительного характера, измеренная глубина может содержать глубину бурения, а также может содержать алгоритмы корректировки глубины, учитывающие упругое растяжение и сжатие бурильной колонны по ее длине.
На фиг. 3 показан общий вид блок-схемы алгоритма усовершенствованного способа 100 определения траектории скважины в соответствии с аспектами настоящего изобретения. В некоторых конкретных вариантах осуществления изобретения блок-схема, показанная на фиг. 3, может представлять способ или алгоритм динамического построения прогнозируемой траектории сложной скважины между двумя точками инклинометрии. Фиг. 3 может дополнительно (или альтернативно) представлять алгоритм, соответствующий по меньшей мере некоторым командам, которые могут храниться, например в запоминающем устройстве, и выполняться, например контроллером или процессором, для осуществления какого-либо или всех нижеописанных или вышеописанных действий, относящихся к раскрытым принципам изобретения. Указанное запоминающее устройство может содержать постоянный машиночитаемый носитель, содержащий компьютерную программу с набором команд, причем указанные команды выполнены с возможностью, при их исполнении одним или более контроллерами, вызывать выполнение указанными контроллерами некоторых или всех действий, представленных на фиг. 3.
В общем случае способ 100 начинается с создания теоретической модели сложной геометрии скважины (также называемой в данной заявке «прогнозируемой траекторией скважины») в первом или исходном пункте инклинометрии. Например, на этапе 101 способа 100, проиллюстрированного на фиг. 3, получают данные, характеризующие один или более параметров бурения между по меньшей мере двумя точками инклинометрии (также называемыми в данной заявке «пунктами инклинометрии»). В некоторых вариантах осуществления изобретения для измерения и/или записи множества параметров бурения между двумя пунктами инклинометрии используют наземные и забойные датчики, например датчики 48, 70, 72, показанные на фиг. 1 и 2. Каждый из указанных пунктов инклинометрии может быть выбран из числа или «набора» точек инклинометрии, которые расположены на одной линии, например, по существу на одинаковом расстоянии друг от друга вдоль траектории скважины. Пункт инклинометрии может быть создан путем выполнения измерений, используемых для оценки положения и/или ориентации скважины на одной позиции внутри скважины. К не имеющим ограничительного характера примерам указанных параметров бурения относятся следующие параметры, как по отдельности, так и в любой логически допустимой комбинации; измеренная глубина, скорость вращения колонны, нагрузка на долото, забойный крутящий момент, крутящий момент на поверхности, входящий поток, давление на поверхности, забойное давление, плотность текучей среды, результаты непрерывных измерений угла наклона, ориентация долота (передней грани инструмента), отклонение долота, диаметр ствола скважины, оценочный износ долота и так далее. Хотя некоторые из этих параметров известны, некоторые из них рассмотрены ниже для ясности и полного понимания сути настоящего изобретения, при этом следует иметь в виду, что нижеприведенные разъяснения никоим образом не ограничивают аспекты настоящего изобретения указанными параметрами или их соответствующими описаниями.
«Входящий поток», содержащий измеренный расход потока бурового раствора, поступающего в скважину, может изменять эффективность процесса бурения. Например, изменение расхода бурового раствора может приводить к изменению направленности работы забойных инструментов. Кроме того, путем изменения расхода потока могут быть изменены характеристики ствола скважины.
Соотнесение изменений расхода потока с изменениями пути прохождения скважины позволяет описать посредством указанной модели более точный путь прохождения скважины. Указанное соотнесение может содержать итерационный процесс определения корректных параметров модели, которая ограничена, по меньшей мере частично, измеренным значением входящего потока.
«Нагрузка на долото» (WOB, от англ. weight-on-bit), содержащая количественное значение направленной вниз силы, действующей на буровое долото и обычно измеряемой в тысячах фунтов, также может изменять эффективность процесса бурения. Изменение нагрузки на долото может привести к изменению направленности работы забойных инструментов. Аналогично входящему потоку, соотнесение изменений нагрузки на долото с изменениями пути прохождения скважины позволяет описать посредством указанной модели более точный путь прохождения скважины. Указанное соотнесение может содержать итерационный процесс определения корректных параметров модели, обусловленных, по меньшей мере частично, измеренным значением нагрузки на долото.
Указанные настройки передней грани инструмента (TF, от англ. tool facing) содержат настройку направления забойного инструмента, которая описывает направление, к которому обращен указанный изгиб, а также степень изгиба («переменный изгиб»). Таким образом, настройки передней грани инструмента непосредственно связаны с путем скважины, и поэтому путь скважины будет изменен в направлении настройки передней грани инструмента.
Измерения забойного (дискретного) угла наклона и азимута, которые представляют собой настройку забойного инструмента, описывают угол наклона и азимут скважины. Аналогично настройкам передней грани инструмента, измерение забойного угла наклона представляет собой измерение пути скважины и, следовательно, в значительной степени влияет на указанный путь скважины.
Забойный крутящий момент, представляющий собой крутящий момент на дальнем конце бурильной колонны вблизи бурового долота, также может изменять эффективность процесса бурения. Аналогично, крутящий момент на поверхности, соответствующий крутящему моменту на верхнем конце бурильной колонны вблизи поворотного стола 14, также может влиять на эффективность процесса бурения. Как и в случае изменений входящего потока и нагрузки на долото, изменение забойного крутящего момента и/или крутящего момента в верхней части скважины может привести к изменению направленности работы забойных инструментов. Соотнесение изменений крутящего момента с изменениями пути скважины позволяет формировать посредством указанной модели более точный путь скважины. Указанное соотнесение может содержать, например, итерационный процесс определения корректных параметров модели, ограниченной, по меньшей мере частично, измеренным значением забойного крутящего момента и/или измеренного крутящего момента в верхней части скважины.
Забойное давление внутри колонны также может изменять эффективность процесса бурения, так как изменение забойного давления может приводить к изменению направленности работы забойных инструментов. В некоторых вариантах осуществления изобретения забойное давление измеряют на буровом инструменте, например на гидравлическом забойном двигателе, буровом долоте или как на буровом двигателе, так и на буровом долоте. Еще одним параметром бурения, который может изменять эффективность процесса бурения, является плотность текучей среды «бурового раствора», изменение которой может приводить к изменению направленности работы забойных инструментов. Более точный путь скважины может быть описан путем соотнесения изменений забойного давления и/или плотности текучей среды с изменениями пути скважины. Указанное соотнесение может содержать, например, итерационный процесс определения корректных параметров модели, ограниченной, по меньшей мере частично, измеренным значением забойного давления. Диаметр ствола скважины и оценочный износ долота, непосредственно связанный с указанным диаметром ствола скважины, также могут влиять на направленность работы инструмента, и в частности, на измерение степени перекоса (или изгиба) КНБК.
Этап 101 способа 100, проиллюстрированного на фиг. 3, также содержит усреднение полученных данных за заданные шаги приращения между двумя точками инклинометрии. Указанные данные могут содержать результаты измерения параметров бурения по времени, выполненные за заданный шаг приращения глубины. В некоторых вариантах осуществления изобретения каждый шаг приращения настроен на назначенный пользователем шаг приращения глубины. В связи с этим, упомянутые данные затем можно усреднить за назначенный пользователем шаг приращения глубины, который может быть введен или выбран, например посредством устройства 44 ввода, причем вводимые данные могут содержать предварительно установленные доступные для выбора варианты, например 30 м, 15 м и 10 м (приблизительно), но которые могут быть уменьшены до столь малых значений глубины, как 1 м, для интервалов с резким искривлением. Кроме того, могут быть использованы другие шаги приращения глубины, без выхода за пределы сущности и идеи настоящего изобретения. Следует пояснить, без каких-либо ограничений, что информация, относящаяся к параметрам бурения, может быть измерена и записана на посекундной основе за малые шаги приращения между двумя пунктами инклинометрии, например через каждые шесть дюймов, или через каждый фут, или через каждый метр. Соответствующие интервалы времени и глубины могут зависеть от скорости, с которой бурильная колонна 20 осуществляет бурение, например, при скорости 60 футов в час (фут·час), шагу приращения глубины в шесть дюймов соответствует 30 секунд сбора данных, которые затем усредняют. Для сравнения, если бурильная колонна 20 осуществляет бурение со скоростью 10 фут·час, временной интервал может быть больше и/или интервал глубины может быть меньше, что приведет к значительному увеличению набора собираемых данных, предназначенных для последующего усреднения. В некоторых вариантах осуществления изобретения, чем выше скорость бурения бурильной колонны, тем меньше указанный набор данных; и наоборот, чем ниже скорость бурения бурильной колонны, тем больше указанный набор данных. Кроме того, может потребоваться обеспечение максимально доступной плотности данных, однако это может быть ограничено такими практическими ограничениями, как, например, ограничения памяти. Дополнительно, набор данных может быть отфильтрован перед усреднением. Например, в некоторых приложениях, в указанный набор данных заносят только частные значения, попадающие в интервал, равный одному среднеквадратическому отклонению (или двум среднеквадратическим отклонениям, или трем среднеквадратическим отклонениям и так далее). Конечным результатом выполнения этапа 101 может являться идентификация контролируемой величины каждого из указанных параметров бурения на назначенном пользователем шаге приращения глубины.
На этапе 103, проиллюстрированном на фиг. 3, исходя из усредненных значений параметров бурения, собранных на этапе 101, рассчитывают прогнозируемую реакцию бурильной колонны на каждом заданном шаге приращения. Прогнозируемая реакция бурильной колонны может быть рассчитана отдельно для каждого параметра бурения. В некоторых вариантах осуществления изобретения прогнозируемая реакция бурильной колонны содержит как реакцию КНБК, так и прогнозируемую реакцию бурового долота. К аспектам настоящего изобретения относится использование подходящего способа, например программного обеспечения для оптимизации бурения Sperry Drilling MaxBHA™ Drilling Optimization Software, программного обеспечения Drill Bits & Services Direction от Design™ Software или программного обеспечения Landmark Wellplan™ BHA Software, реализуемых компанией Halliburton Energy Services Inc. для расчета реакции системы бурения и долота на измеренные параметры с целью определения изменения азимута и угла наклона за каждый шаг приращения. Дополнительная информация касательно программного обеспечения для моделирования MaxBHA™, которое можно использовать для расчета реакции бурильной колонны, содержится в работе D.С. Chen and M. Wu, "State-of-the-Art BHA Program Produces Unprecedented Results," IPTC 11945 (2008), содержание которой во всей полноте включено в настоящую заявку посредством ссылки. Исходя из прогнозируемой реакции бурильной колонны, можно рассчитать изменения как азимута, так и угла наклона траектории за каждый назначенный пользователем шаг приращения глубины.
MaxBHA™ позволяет создать двухмерную статическую модель. В общем случае трехмерную реакцию КНБК напрямую не рассчитывают - программное обеспечение MaxBHA™, как правило, позволяет моделировать реакцию КНБК только в вертикальной плоскости. Однако трехмерная реакция КНБК может быть косвенно получена на основе результатов указанного моделирования. В программном обеспечении MaxBHA™ компоненты КНБК рассматриваются или в прямолинейной скважине, или в скважине с постоянным радиусом кривизны, и предусмотрены модели для прогнозирования реакции вращающихся управляемых инструментов. Для сравнения, программное обеспечение Wellplan™BHA DrillAhead Software содержит два компонента: первый, в котором для прочностного расчета закрепленной КНБК используют технологию нелинейного трехмерного анализа методом конечных элементов; и второй, в котором для определения тенденций бурения установки используют сочетание аналитических методов и правил. Указанный подход может в целом рассматриваться как предпочтительная для использования система при решении задач определения реакции КНБК в сложной скважине. Однако существующее программное обеспечение Wellplan™BHA не содержит модель для приведенных в примере вращающихся управляемых инструментов и имеет размерные ограничения на конечно-элементную модель.
Указанные изменения угла наклона и азимута используют для формирования прогнозируемой траектории скважины, как показано на этапе 105. В некоторых вариантах осуществления изобретения исходные значения инклинометрии являются стационарными значениями инклинометрии (например, полученными в одной точке) измеренной глубины, угла наклона и азимута. Например, для формирования прогнозируемой траектории скважины в первом пункте инклинометрии к исходным значениям инклинометрии можно добавить сумму пошаговых изменений угла наклона и азимута. При итерационном подходе прогнозируемую траекторию скважины можно следом за этим обновлять, систематически или случайным образом, добавляя изменения угла наклона, азимута, измеренной глубины или любого логически допустимого сочетания перечисленных величин.
На данной стадии способа 100, проиллюстрированного на фиг. 3, определяют, является ли прогнозируемая траектория скважины приемлемой. Например, на этапе 107 прогнозируемую траекторию скважины сравнивают с измеренной траекторией скважины, определяемой, в соответствии с некоторыми вариантами осуществления изобретения, во втором пункте инклинометрии. Указанное сравнение, согласно аспектам настоящего изобретения, предназначено для определения того, находится ли разница между прогнозируемой траекторией скважины и измеренной траекторией скважины в заданном допустимом интервале погрешности. Указанный допустимый интервал погрешности может зависеть, например, от вида математической модели ошибок, применяемой для определения того, что является «математически допустимым». В качестве примера, не имеющего ограничительного характера, можно применить модель допустимых ошибок, описанную в работе H.S. Wiiliamsom, «Accuracy Prediction for Directional Measurement While Drilling», SPE Drill & Completion Vol.15, No.4 (December 2000), содержание которой во всей полноте включено в настоящую заявку посредством ссылки. Если результат сравнения является приемлемым (этап 107=ДА), вероятное положение скважины определяют или иным образом идентифицируют, исходя из изменения угла наклона и азимута на каждом из заданных шагов приращения, как указано на этапе 109. Согласно существующей практике создают единственную кривую для моделирования траектории скважины между двумя точками инклинометрии. Напротив, в некоторых вариантах осуществления изобретения, прогнозируемая траектория скважины представляет собой сумму дискретных изменений за малое расстояние, так что содержит серию кривых. В качестве примера, не имеющего ограничительного характера, если стандартное расстояние между точками инклинометрии составляет 19 футов, а измерения производят через каждые шесть дюймов, для формирования положения скважины строят 180 малых кривых. Другими словами, способы, раскрытые в настоящем изобретении, содержат построение сложной модели геометрии скважины между двумя пунктами инклинометрии вместо построения простой модели, содержащей одну кривую.
Если на этапе 107 было определено, что прогнозируемые значения, полученные на этапе 105, значительно отличаются от величин, измеренных во втором пункте инклинометрии, можно применить поправочный коэффициент и пересчитать указанные прогнозируемые значения. Например, на этапе 111, если результат сравнения является неприемлемым (этап 107=НЕТ), в поправочном коэффициенте можно учесть статистическую погрешность. Указанную прогнозируемую реакцию бурильной колонны одновременно пересчитывают, учитывая в поправочном коэффициенте статистическую погрешность. В некоторых случаях, мягкая формация вокруг компоновки низа бурильной колонны будет быстрее увеличивать угол наклона при настройке на увеличение угла наклона (и будет быстрее снижать угол наклона при обратной настройке), чем оценивает базовая модель. Для коррекции указанного варианта развития событий можно определить (например, с применением вероятностных алгоритмов) статистическую погрешность и использовать ее для введения соответствующего поправочного коэффициента с целью компенсации указанного варианта развития событий. Опционально, для более точного прогнозирования положения скважины по месту нахождения долота можно применить коррекцию на участке скважины, находящейся между измерительным прибором и долотом. В некоторых вариантах осуществления изобретения вышеописанные действия итерируются, то есть этапы 103, 105, 107 и 111 повторяют, пока ожидаемые значения наклона и азимута не окажутся в допустимых пределах рассогласования по сравнению с измеренными значениями этих величин.
На фиг. 4 показан график 200, иллюстрирующий, для различных измеренных значений глубины, прогнозируемый темп набора кривизны скважины для примера вращающейся управляемой компоновки и темп набора кривизны скважины, рассчитанный с использованием наддолотного датчика наклона. Линией 201 показан пример прогнозируемого темпа набора кривизны скважины, который может быть определен с помощью программного обеспечения для оптимизации бурения МахВНА™ Drilling Optimization Software. Линией 203 показан рассчитанный темп набора кривизны скважины, сформированный на основе данных, поступивших от датчика, установленного на вращающемся инструменте. Учитывая, что диаметр ствола скважины влияет на реакцию КНБК, линией 205 обозначен номинальный диаметр ствола скважины (8,5 дюймов на фиг. 4), а линией 207 показан диаметр ствола скважины, измеренный забойными датчиками. Линией 209 показан угол наклона скважины, измеренный основным инклинометром. Как видно на фиг. 4, прогнозируемый темп набора кривизны скважины, обозначенный 201, близок к рассчитанному (измеренному) темпу набора кривизны скважины, обозначенному 203. Однако колебания темпа набора кривизны скважины в указанном рассчитанном темпе 203 набора кривизны скважины значительно больше, чем в прогнозируемом (измеренном) темпе 201 набора кривизны скважины, как видно на фиг. 4. Следовательно, преимущество использования прогнозируемого (измеренного) темпа 201 набора кривизны скважины заключается в том, что он в меньшей степени подвержен влиянию помех, создаваемых, например, вибрациями при бурении. При попытке точно измерить изменения траектории буровые вибрации влияют на фактическое положение датчика (который двигается из-за вибраций), что в свою очередь влияет на точность производимых измерений.
Другой вариант осуществления настоящего изобретения содержит расчет несоосности инклинометра в скважине в обоих указанных первом и во втором пунктах инклинометрии. В ходе бурения скважины для определения траектории скважины и направленной проводки скважины к подземной цели можно измерять угол наклона и азимут скважины совместно с глубиной скважины. Инклинометр, который может быть установлен на утяжеленных бурильных трубах КНБК, измеряет направление и магнитуду локальных гравитационных и магнитных полей. Измерение характеристик магнитного и гравитационного полей Земли могут быть использованы для оценки азимута и угла наклона скважины в конкретной точке или точках измерения. При каждом прерывании бурения на добавление очередной секции или секций бурильных труб к бурильной колонне может быть произведена статическая инклинометрия. Данные об азимуте и угле наклоне могут быть получены известными инклиметрическими средствами и переданы на поверхность известными телеметрическими способами.
Вышеупомянутую несоосность можно рассчитать путем моделирования относительного положения КНБК внутри сложной скважины в соответствии с приведенным выше описанием (например, см. фиг. 3). Например, после этапа создания трехмерной математической модели сложной скважины предлагаемый способ может дополнительно содержать определение того, как компоновка бурильной колонны впишется внутрь указанной сложной скважины, определение положения точек контакта и определение несоосности между инклинометром и скважиной. Указанная несоосность инклинометра известна как «перекос». В общем случае, длинная, трубчатая компоновка бурильной колонны может деформироваться под действием силы тяжести. Если инклинометр находится на «перекошенном» участке компоновки бурильной колонны, указанный инклинометр несоосен скважине вследствие перекоса трубы. Указанную несосность, таким образом, учитывают и используют для коррекции фактических данных инклинометрии. В некоторых вариантах осуществления изобретения данную коррекцию могут рассчитывать путем измерения траектории скважины посредством системы GPS-навигации.
Традиционно, расчет коррекции перекоса инструмента относительно формы скважины основан на модели минимальной кривизны. Однако в данном варианте осуществления изобретения при моделировании могут быть учтены различные факторы, которые не учитываются в модели минимальной кривизны, в том числе один или более следующих факторов: сложная геометрия и жесткость компоновки низа бурильной колонны; сложная геометрия скважины, как описано прогнозируемым углом наклона и азимутом в варианте осуществления изобретения с фиг. 3; и размер скважины (например, диаметр) и форма (например, оцениваемую по результатам кавернометрии).
Опционально, указанные прогнозируемые угол наклона и азимут могут быть затем пересчитаны между указанными первым и вторым пунктами инклинометрии на основе новых пунктов инклинометрии со скорректированным перекосом. В качестве другой опции, варианты осуществления настоящего изобретения могут содержать расчет смещения инклинометрического инструмента внутри скважины в процессе непрерывных инклинометрических измерений в процессе бурения для описания геометрии скважины. Другая опция содержит коррекцию результатов непрерывных измерений угла наклона и азимута, производимых в процессе бурения, при помощи вышеописанных способов расчета смещения инклинометрического инструмента внутри скважины.
Аспекты настоящего изобретения также могут быть использованы в качестве способа хронологического исследования ранее пробуренных скважин, по которым отсутствуют непрерывно поступающие данные инклинометрии, и для перерасчета положения скважины с увеличенной точностью. Потенциально, это может иметь значительный коммерческий успех на практике в случаях строительства и целевой проводки горизонтальных стволов скважин в условиях неопределенности фактической вертикальной глубины (TVD, от англ. true vertical depth). Корректировка по ближайшим соседним скважинам могла бы снизить неопределенность при строительстве новой скважины, и потенциально могло бы увеличить точность расчетов объема коллектора.
Различные аспекты настоящего изобретения могут быть реализованы в некоторых вариантах его осуществления через посредство выполняемой компьютером программы команд, например программных модулей, обычно называемых программными приложениями или прикладными программами, выполняемыми компьютером. Указанное программное обеспечение может содержать, в качестве примеров, не имеющих ограничительного характера: подпрограммы, программы, объекты, компоненты и структуры данных, выполняющие конкретные задания или реализующие конкретные абстрактные типы данных. Указанное программное обеспечение формирует интерфейс, обеспечивающий реагирование компьютера на вводимые данные. Указанное программное обеспечение может также работать совместно с другими кодовыми сегментами для запуска выполнения различных заданий в ответ на данные, поступающие от источника полученных данных. Указанное программное обеспечение может храниться в запоминающем устройстве любого типа, например на компакт-диске, магнитном диске, запоминающем устройстве на магнитных доменах и полупроводниковом запоминающем устройстве (например, оперативном или постоянном запоминающем устройстве любого типа). Кроме того, указанное программное обеспечение и результаты его работы могут передаваться при помощи различных средств передачи данных, в том числе по проводам; по оптоволоконным кабелям; по беспроводной сети, по сети Интернет; посредством свободного пространства и любого сочетания перечисленных средств.
Кроме того, многочисленные аспекты настоящего изобретения могут быть осуществлены посредством различных компьютерных систем и устройств, объединенных в компьютерную сеть, в том числе портативных приборов, многопроцессорных систем, микропроцессорных и программируемых пользователем электронных устройств, миникомпьютеров, универсальных компьютеров и других подобных устройств. Кроме того, аспекты настоящего изобретения могут быть осуществлены на практике в распределенных вычислительных средах, в которых задания выполняются устройствами удаленной обработки, соединенными в коммуникационную сеть. В распределенных вычислительных средах программные модули могут находиться как на локальном, так и на удаленном носителе информации, в том числе на запоминающих устройствах. Таким образом, аспекты настоящего изобретения могут быть реализованы в компьютерной системе или иной системе обработки данных при помощи различных аппаратных средств, программных средств или сочетания таковых.
В данной заявке проиллюстрированы и описаны конкретные варианты осуществления и применения настоящего изобретения, однако следует понимать, что настоящее изобретение не ограничено конкретной конструкцией и составом элементов, описанными в данной заявке, и что из приведенного описания очевидным образом следуют различные модификации, изменения и вариации настоящего изобретения, не выходящие за рамки сущности и объема изобретения, определяемых приложенной формулой изобретения.
Изобретение относится к картированию и бурению скважин. Техническим результатом является повышение точности определения траектории скважины между пунктами инклинометрии и расчета положения скважины. Предложен способ определения траектории скважины, формируемой бурильной колонной. Указанный способ содержит: прием данных, характеризующих один или более параметров бурения между, по меньшей мере, двумя точками инклинометрии; усреднение полученных данных за заданные шаги приращения между указанными, по меньшей мере, двумя точками инклинометрии; расчет исходя из, по меньшей мере, указанных усредненных данных прогнозируемой реакции бурильной колонны для каждого из заданных шагов приращения; определение исходя из, по меньшей мере, указанной прогнозируемой реакции бурильной колонны изменения угла наклона и азимута для каждого из заданных шагов приращения; формирование прогнозируемой траектории скважины исходя из указанного изменения угла наклона и азимута; сравнение указанной прогнозируемой траектории скважины с измеренной траекторией скважины; и если результаты указанного сравнения приемлемы, определение вероятного положения скважины исходя из указанного изменения угла наклона и азимута для каждого из заданных шагов приращения. Раскрыты также машиночитаемый носитель и система для реализации указанного способа. 3 н. и 17 з.п. ф-лы, 3 ил.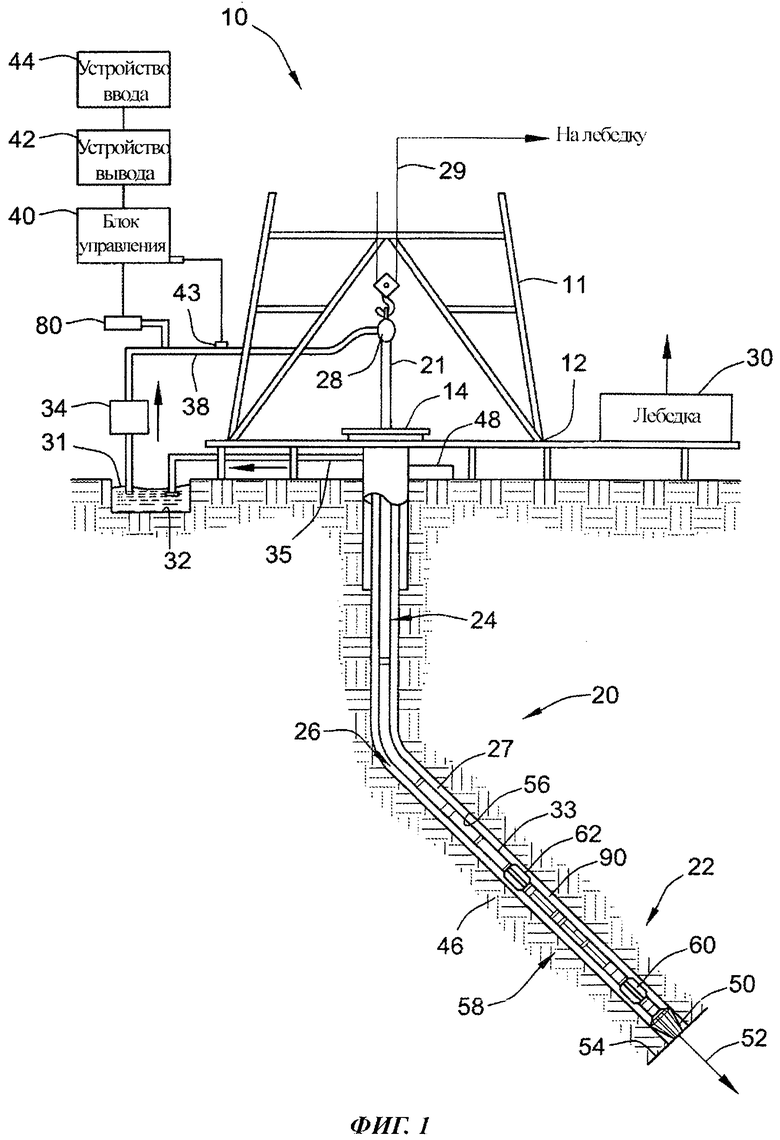
1. Способ определения траектории скважины, формируемой бурильной колонной, причем указанный способ содержит:
получение данных, характеризующих один или более параметров бурения, между по меньшей мере двумя точками инклинометрии;
усреднение полученных данных за заданные шаги приращения между указанными по меньшей мере двумя точками инклинометрии;
расчет исходя из по меньшей мере указанных усредненных данных прогнозируемой реакции бурильной колонны для каждого из заданных шагов приращения;
определение исходя из по меньшей мере указанной прогнозируемой реакции бурильной колонны изменения угла наклона и азимута для каждого из заданных шагов приращения;
формирование прогнозируемой траектории скважины исходя из по меньшей мере указанного изменения угла наклона и азимута;
сравнение указанной прогнозируемой траектории скважины с измеренной траекторией скважины; и
если результаты указанного сравнения приемлемы, определение вероятного положения скважины исходя из по меньшей мере указанного изменения угла наклона и азимута для каждого из заданных шагов приращения.
2. Способ по п. 1, в котором результаты указанного сравнения считают приемлемыми, если разница между указанной прогнозируемой траекторией скважины и указанной измеренной траекторией скважины находится в заданном допустимом интервале погрешности.
3. Способ по п. 1, дополнительно содержащий,
если результаты указанного сравнения неприемлемы, перерасчет указанной прогнозируемой реакции бурильной колонны с применением поправочного коэффициента, учитывающего статистическую погрешность.
4. Способ по п. 3, в котором указанные перерасчет, определение, формирование и сравнение повторяют до тех пор, пока результаты указанного сравнения не станут приемлемыми.
5. Способ по п. 1, в котором указанную прогнозируемую траекторию скважины определяют в первой из указанных по меньшей мере двух точек инклинометрии и в котором указанную измеренную траекторию скважины определяют во второй из указанных по меньшей мере двух точек инклинометрии.
6. Способ по п. 1, в котором указанная бурильная колонна содержит компоновку низа бурильной колонны (КНБК) и буровое долото и в котором указанная прогнозируемая реакция бурильной колонны содержит прогнозируемую реакцию КНБК и прогнозируемую реакцию бурового долота.
7. Способ по п. 1, в котором указанные полученные данные содержат результаты измерений во времени указанных одного или более параметров бурения, выполненных по глубине.
8. Способ по п. 1, дополнительно содержащий
прием назначенного пользователем шага приращения глубины, причем каждый из заданных шагов приращения по существу равен назначенному пользователем шагу приращения глубины.
9. Способ по п. 1, дополнительно содержащий
расчет прогнозируемой реакции бурильной колонны для каждого из указанных параметров бурения.
10. Способ по п. 1, дополнительно содержащий
расчет несоосности инклинометра внутри скважины в обеих указанных по меньшей мере двух точках инклинометрии.
11. Способ по п. 10, в котором указанный расчет несоосности основан, по меньшей мере частично, на по меньшей мере сложной геометрии и жесткости указанной КНБК, сложной геометрии указанной скважины и размере и форме скважины.
12. Способ по п. 10, дополнительно содержащий
перерасчет изменения угла наклона и азимута на каждом из заданных шагов приращения, основанный, по меньшей мере частично, на указанной несоосности инклинометра.
13. Способ по п. 10, в котором указанный расчет несоосности основан, по меньшей мере частично, на результатах непрерывных инклинометрических измерений в процессе бурения указанной бурильной колонной.
14. Способ по п. 1, в котором указанные один или более параметры бурения содержат измеренную глубину, скорость вращения колонны, нагрузку на долото, забойный крутящий момент, крутящий момент на поверхности, входящий поток, давление на поверхности, забойное давление, плотность текучей среды, результаты непрерывных измерений угла наклона в забое скважины, ориентацию долота, отклонение долота, диаметр ствола скважины и оценочный износ долота или комбинацию указанных параметров.
15. Постоянный машиночитаемый носитель, хранящий компьютерную программу с набором команд, причем указанный набор команд выполнен с возможностью вызывать, при исполнении одним или более контроллерами, следующие действия:
усреднение набора измеренных данных за заданные шаги приращения между по меньшей мере двумя точками инклинометрии, причем указанный набор данных характеризует множество параметров бурения;
расчет исходя из по меньшей мере указанного набора усредненных данных прогнозируемой реакции бурильной колонны для каждого заданного шага приращения;
определение исходя из по меньшей мере указанной прогнозируемой реакции бурильной колонны изменения угла наклона и азимута для каждого заданного шага приращения;
формирование прогнозируемой траектории скважины, исходя из по меньшей мере указанного изменения угла наклона и азимута;
сравнение указанной прогнозируемой траектории скважины с измеренной траекторией скважины;
если результаты указанного сравнения неприемлемы, перерасчет указанной прогнозируемой реакции бурильной колонны с применением поправочного коэффициента, учитывающего статистическую погрешность, и повторение указанных действий по определению, формированию и сравнению; и
если результаты указанного сравнения приемлемы, определение вероятного положения скважины исходя из указанного изменения угла наклона и азимута для каждого заданного шага приращения.
16. Система прогнозирования пути геометрически сложной скважины, пробуриваемой системой наклонно-направленного бурения, имеющей по меньшей мере один датчик, функционально соединенный с бурильной колонной, содержащей компоновку низа бурильной колонны КНБК и буровое долото, причем указанная система содержит:
устройство ввода, выполненное с возможностью приема входных данных от пользователя;
контроллер;
запоминающее устройство для хранения множества команд, которые при их выполнении контроллером вызывают выполнение указанным контроллером следующих действий:
прием от указанного по меньшей мере одного датчика результатов измерений, характеризующих множество параметров бурения между первой и второй точками инклинометрии;
усреднение принятых результатов измерений за каждый из множества назначенных пользователем шагов приращения глубины между указанными первой и второй точками инклинометрии;
расчет исходя из по меньшей мере указанных усредненных результатов измерений прогнозируемой реакции КНБК и прогнозируемой реакции бурового долота для каждого из указанных шагов приращения глубины;
определение исходя из по меньшей мере указанной прогнозируемой реакции КНБК и указанной прогнозируемой реакции бурового долота изменения угла наклона и азимута для каждого из указанных шагов приращения глубины;
формирование прогнозируемой траектории скважины в указанной первой точке инклинометрии исходя из по меньшей мере указанного изменения угла наклона и азимута;
сравнение указанной прогнозируемой траектории скважины с измеренной траекторией скважины в указанной второй точке инклинометрии; и
если результаты сравнения приемлемы, определение вероятного положения скважины исходя из указанного изменения угла наклона и азимута для каждого из указанных шагов приращения глубины.
17. Система по п. 16, в которой указанное запоминающее устройство дополнительно хранит команду на выполнение следующих действий:
если результаты сравнения неприемлемы, произвести перерасчет указанной прогнозируемой реакции бурильной колонны путем применения поправочного коэффициента, учитывающего статистическую погрешность; и
повторять указанные команды по определению, формированию и сравнению до тех пор, пока результаты указанного сравнения не станут приемлемыми.
18. Система по п. 17, в которой результаты указанного сравнения считают приемлемыми, если разница между указанной прогнозируемой траекторией скважины и указанной измеренной траекторией скважины находится в заданном допустимом интервале погрешности.
19. Система по п. 16, в которой указанные измерения содержат измерения во времени множества параметров бурения, выполняемые по глубине.
20. Система по п. 16, в которой указанное запоминающее устройство дополнительно хранит команду на выполнение следующих действий:
рассчитать указанную прогнозируемую реакцию КНБК и указанную прогнозируемую реакцию бурового долота для каждого параметра из указанного множества параметров бурения.
| US 20090205867 A1, 20.08.2009 | |||
| СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ | 2001 |
|
RU2208153C2 |
| Дверная накладка-замок | 1929 |
|
SU13660A1 |
| US 20080275648 A1, 06.11.2008 | |||

