Изобретение относится к области исследований устойчивости, управляемости и динамики посадки самолетов и может быть использовано в приборном оборудовании летательных аппаратов для повышения безопасности, сокращения сроков и стоимости летного обучения, а также летной отработки управляемости самолетов при посадке на объект - корабль или взлетно-посадочная полосу (ВПП).
Известен способ летного моделирования ручной визуальной посадки на ВПП путем имитации так называемой «посадки на облако», опубликованный в статье «Самолет Sukhoi Superjet-100 совершил второй полет», РИА Новости, 28/05/2008 и в книге авторов Близнюк В., Васильев Л., Вуль В. и др. «Правда о сверхзвуковых пассажирских самолетах», издательство "Московский рабочий", 2000 г.
Недостатком этого способа является невозможность объективной оценки точности посадки и несоответствие форм облака и натурной ВПП.
Известен способ летного моделирования ручной визуальной посадки самолета на ВПП, основанный на визуальном управлении самолетом с использованием изображения виртуальной ВПП, формируемого на пилотажном индикаторе летчика - многофункциональном индикаторе - с помощью бортовой вычислительной машины (БЦВМ) и совмещаемого в пространстве с реальной ВПП на основе информации, получаемой от спутниковой системы измерения координат самолета и аэродромной ВПП. (См. Описание изобретения к Патенту 2297596).
Недостатком этого способа летного моделирования посадки является необходимость использования натурных аэродромных посадочных систем, трудность обеспечения безопасности обучения при посадке в сложных условиях, а также низкая вероятность реализации желаемых метеоусловий посадки, в частности параметров ветра.
Задачей изобретения является создание способа летного моделирования ручной визуальной посадки на объект, обеспечивающего летное обучение пилотированию и отработку характеристик управляемости самолета на требуемой высоте, превышающей штатную высоту расположения объекта, без использования натурных посадочных систем объекта при заданных параметрах ветра относительно объекта.
Техническим результатом является повышение безопасности и существенное сокращение сроков и стоимости летного обучения и летной отработки управляемости самолетов при посадке на объект (корабль или ВПП) в сложных условиях (горный аэродром, сильный ветер, большая качка корабля, отказы).
Задача и технический результат достигаются тем, что в способе летного моделирования ручной визуальной посадки самолета на объект, включающем формирование изображения на пилотажном индикаторе летчика - индикаторе на лобовом стекле или многофункциональном индикаторе - виртуального объекта и его системы индикации посадки, визуальное управление самолетом при посадке на виртуальный объект с использованием его изображения на пилотажном индикаторе летчика и регистрацию параметров движения самолета относительно виртуального объекта, определяют с помощью бортовой цифровой вычислительной машины координаты движения самолета в воздушной системе координат путем интегрирования составляющих вектора скорости самолета в воздушной системе координат, определяемых на основе данных измерения бортовыми датчиками углов атаки, скольжения, тангажа, курса и крена, задают штатный закон движения виртуального объекта в воздушной системе координат на высоте, превышающей штатную высоту расположения объекта, и вычисляют координаты виртуального объекта в воздушной системе координат путем прибавления к координатам виртуального объекта при штатном законе движения приращений соответствующих координат движения самолета относительно их начальных значений, умноженных на отношение разности истинной и приборной скоростей самолета к истинной скорости самолета, которые используются при формировании изображения виртуального объекта и системы индикации посадки на пилотажном индикаторе летчика.
Для обеспечения летного моделирования посадки при наличии ветра относительно объекта к координатам виртуального корабля прибавляются интегралы соответствующих составляющих вектора скорости ветра относительно корабля.
Перечень чертежей
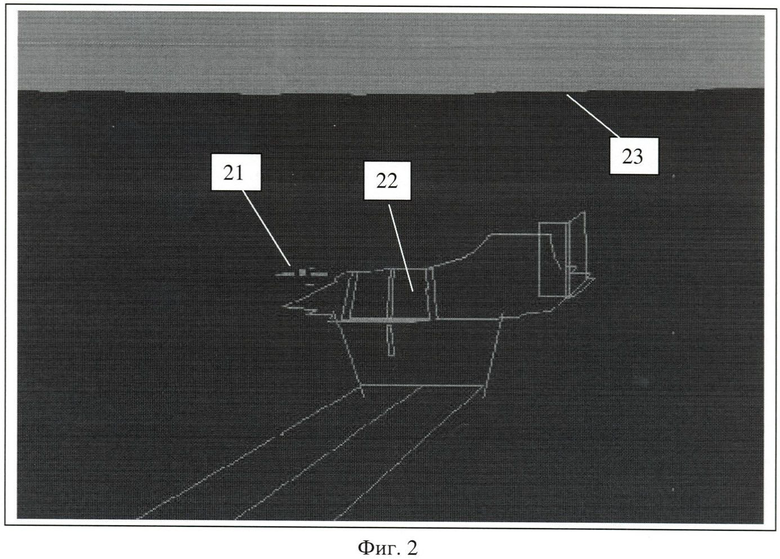
На фиг.1 проиллюстрирован способ летного моделирования ручной визуальной посадки на объект на повышенной высоте в случае, когда объектом является корабль, где:
1 - самолет,
2 - корабль,
3 - система индикации посадки,
4 - пилотажный индикатор летчика,
5 - 3-мерное изображение,
6 - виртуальный корабль,
7 - виртуальная система индикации посадки,
8 - бортовая цифровая вычислительная машина,
9 - вектор истиной скорости самолета,
10 - датчики углов атаки и скольжения,
11 - датчики тангажа, курса и крена,
12 - вектор приборной скорости самолета,
13 - виртуальная посадочная глиссада,
14 - траектория тормозного гака,
15 - тормозной гак,
16 - зона касания палубы виртуального корабля,
17 - посадочная глиссада,
18 - траектория тормозного гака,
19 - зона касания палубы корабля,
20 - вектор скорости ветра относительно корабля.
На фиг.2 показано изображение корабля и системы индикации посадки - палубной оптической системы посадки, формируемое на индикаторе на лобовом стекле, где:
21 - 3-мерное графическое изображение виртуального корабля,
22 - изображение виртуальной палубной оптической системы посадки,
23 - линия естественного горизонта.
Способ летного моделирования ручной визуальной посадки самолета 1 на корабль 2 с системой индикации посадки 3 основан на формировании на пилотажном индикаторе летчика 4 - индикаторе на лобовом стекле или многофункциональном индикаторе - 3-мерного изображения 5 виртуального корабля 6 с виртуальной системой индикации посадки 7 и на управлении летчиком посадкой самолета 1 на виртуальный корабль 6 с использованием 3-мерного изображения 5 виртуального корабля 6, которое формируют на основе расчета на бортовой цифровой вычислительной машине 8 координат движения самолета 1 в воздушной системе координат и координат виртуального корабля 6 в воздушной системе координат. Координаты движения самолета 1 в воздушной системе координат вычисляют путем интегрирования составляющих вектора истиной скорости самолета 9 в воздушной системе координат, определяемых на основе данных измерения бортовыми датчиками углов атаки и скольжения 10 и датчиками тангажа, курса и крена 11. Координаты виртуального корабля 6 в воздушной системе координат вычисляются путем задания ему штатного закона движения корабля 2 в воздушной системе координат на высоте, превышающей штатную высоту расположения корабля 2, и прибавления к координатам виртуального корабля 6 при штатном законе движения приращений соответствующих координат движения самолета 1 относительно их начальных значений, умноженных на отношение разности истинной скорости самолета 9 и приборной скорости самолета 12 к истинной скорости самолета 9. Полученные координаты и угловое положение самолета 1 и виртуального корабля 6, характеризующие положение виртуального корабля 6 и виртуальной системы индикации посадки 7 относительно самолета 1, используются при формировании 3-мерного изображения 5 виртуального корабля 6 на пилотажном индикаторе летчика 4.
Используя 3-мерное изображение 5 виртуального корабля 6 и виртуальной системы индикации посадки 7, летчик осуществляет ручное визуальное управление посадкой на виртуальный корабль 6, выполняя полет по виртуальной посадочной глиссаде 13 путем управления угловым положением самолета 1 и приборной скоростью самолета 12 до момента пересечения траектории 14 тормозного гака 15 с посадочной палубой виртуального корабля 6 в зоне касания виртуальной палубы 16, чем достигается летное моделирование посадки самолета 1 на корабль 2, выполняемой в штатных условиях путем полета по посадочной глиссаде 17 системы индикации посадки 3, обеспечивающего пересечение траекторией тормозного гака 18 палубы корабля 2 в зоне касания палубы корабля 19.
Процессы изменения параметров движения самолета относительно виртуального корабля регистрируются в бортовой цифровой вычислительной машине 8.
Для обеспечения подобия короткопериодического движения самолета при летном моделировании посадки на повышенной высоте и при реальной штатной посадке управление приборной скоростью самолета 12 осуществляется по закону, используемому при штатной посадке на корабль 2.
При летном моделировании на повышенной высоте истинная скорость самолета 9 превышает приборную скорость самолета 12 (на ~30% на высоте 5000 метров). Поэтому при летном моделировании посадки на повышенной высоте траекторное движение самолета относительно земли может заметно отличаться от траекторного движения при обычной штатной посадке. Для обеспечения подобия траекторного движения самолета 1 относительно виртуального корабля 6 при летном моделировании на повышенной высоте координаты виртуального корабля 6 в воздушной системе координат вычисляют путем прибавления к координатам виртуального корабля 6 при штатном законе движения на заданной повышенной высоте приращений соответствующих координат движения самолета 1 относительно их начальных значений, умноженных на отношение разности истинной скорости самолета 9 и приборной скорости самолета 12 к истинной скорости самолета 9.
Проведенные расчеты и моделирование на пилотажном стенде подтвердили эффективность использования предлагаемых алгоритмов для обеспечения подобия движений самолета 1 относительно виртуального корабля 2 при летном моделировании посадки и при штатной посадке на корабль и ВПП в широком диапазоне высот.
Для обеспечения летного моделирования посадки при наличии ветра относительно корабля 20 к координатам виртуального корабля 6 прибавляют интегралы составляющих вектора скорости ветра относительно корабля 20. При этом в процессе управления посадкой на виртуальный корабль движение самолета относительно корабля будет соответствовать движению при натурной посадке при наличии ветра и способствует безопасности его посадки.
С целью оценки возможности визуального управления посадкой при использовании монохромного изображения виртуального корабля на индикаторе на лобовом стекле было разработано упрощенное изображение виртуального корабля 6 и разработана программа расчета на пилотажном стенде ЦАГИ ПС-ЮМ, обеспечивающая формирование 3-мерного графического изображения виртуального корабля 21, виртуальной системы индикации посадки 22 и линии естественного горизонта 23, которые использовались при моделировании посадки на пилотажном стенде ПС-10М.
Проведенное па пилотажном стенде ПС-10М моделирование посадки на корабль с участием двух летчиков-испытателей и одного корабельного летчика показало, что при принятом законе движения виртуального корабля 6 и сохранении закона управления приборной скоростью самолета 1 практически обеспечивается независимость управляемости самолета и точности посадки от высоты полета при летном моделировании посадки на высотах до 5000 м. Показано, что точность визуальной посадки с использованием упрощенного монохромного графического изображения корабля и подробного цветного изображения корабля отличается не более чем на 10 процентов.
При предлагаемом способе летного моделирования посадки на корабль на повышенной высоте без использования натурных посадочных систем обеспечивается повышение безопасности и автономность проведения летных испытаний, позволяющая увеличить в несколько раз число выполнения посадок в одном полете по сравнению с обычным методом посадки на корабль, что позволяет существенно сократить сроки и снизить стоимость проведения летных исследований посадки и обучения. При этом может быть обеспечена постепенность усложнения задачи пилотирования при обучении, что также повышает безопасность летного обучения.
Данное предложение включено план совместных работ с промышленностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛЕТНОГО МОДЕЛИРОВАНИЯ РУЧНОЙ ВИЗУАЛЬНОЙ ПОСАДКИ САМОЛЕТА НА ОБЪЕКТ | 2010 |
|
RU2450246C2 |
| СПОСОБ ИНДИКАЦИИ ЛЕТЧИКУ О ПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ЗАДАННОЙ ГЛИССАДЫ ПРИ ЗАХОДЕ НА ПОСАДКУ НА КОРАБЛЬ | 2014 |
|
RU2558524C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
| СПОСОБ ФОРМИРОВАНИЯ ПИЛОТАЖНО-НАВИГАЦИОННОЙ ИНФОРМАЦИИ НА МНОГОФУНКЦИОНАЛЬНОМ ИНДИКАТОРЕ ДЛЯ ВЫПОЛНЕНИЯ ПОСАДКИ | 2005 |
|
RU2297596C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| Способ воспроизведения условий полета при помощи использования технологии виртуальной реальности на настольном пилотажном стенде для проведения эргономических исследований по информационно-управляющему полю пилотажной кабины | 2022 |
|
RU2793663C1 |
Изобретение относится к области исследований устойчивости, управляемости и динамики посадки самолетов и может быть использовано в приборном оборудовании летательных аппаратов для повышения безопасности и сокращения сроков и стоимости летного обучения и летной отработки управляемости самолетов при посадке на объект (корабль или ВПП). Предлагаемый способ включает формирование изображения на пилотажном индикаторе летчика виртуального объекта и его системы индикации посадки, визуальное управление самолетом при посадке на виртуальный объект с использованием его изображения на пилотажном индикаторе летчика, выдерживание приборной скорости самолета, близкой к штатной приборной скорости, и регистрацию параметров движения самолета относительно виртуального объекта. При этом определяют с помощью бортовой цифровой вычислительной машины координаты движения самолета в воздушной системе координат путем интегрирования составляющих вектора скорости самолета в воздушной системе координат, вычисляемых на основе данных измерения бортовыми датчиками углов атаки, скольжения, тангажа, курса и крена, задают штатный закон движения виртуального объекта в воздушной системе координат на высоте, превышающей штатную высоту расположения объекта, и вычисляют координаты виртуального объекта в воздушной системе координат путем прибавления к координатам виртуального объекта при штатном движении приращений соответствующих координат движения самолета относительно их начальных значений, умноженных на отношение разности истинной и приборной скоростей самолета к истинной скорости самолета. Для обеспечения летного моделирования посадки при наличии ветра относительно объекта к координатам виртуального объекта прибавляют интегралы соответствующих составляющих вектора скорости ветра относительно объекта. Полученные координаты самолета и виртуального объекта используются для формирования изображения виртуального объекта и системы индикации посадки на пилотажном индикаторе летчика. Технический результат заключается в повышении безопасности и сокращении сроков летного обучения. 1 з.п. ф-лы, 2 ил.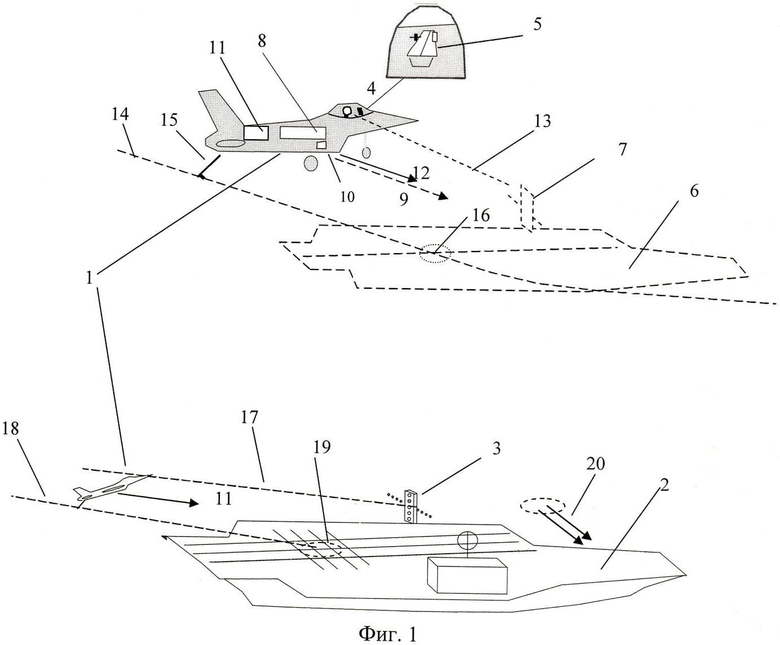
1. Способ летного моделирования ручной визуальной посадки самолета на объект, включающий формирование изображения на пилотажном индикаторе летчика - индикаторе на лобовом стекле или многофункциональном индикаторе - виртуального объекта и его системы индикации посадки, визуальное управление самолетом при посадке на виртуальный объект с использованием его изображения на пилотажном индикаторе летчика, выдерживание приборной скорости самолета, близкой к штатной приборной скорости, и регистрацию параметров движения самолета относительно виртуального объекта, отличающийся тем, что с помощью бортовой цифровой вычислительной машины определяют координаты движения самолета в воздушной системе координат путем интегрирования составляющих вектора скорости самолета в воздушной системе координат, вычисляемых на основе данных измерения бортовыми датчиками углов атаки, скольжения, тангажа, курса и крена, задают в соответствии с задачей летного моделирования посадки самолета штатный закон движения виртуального объекта в воздушной системе координат на высоте, превышающей штатную высоту расположения объекта, и вычисляют координаты виртуального объекта в воздушной системе координат путем прибавления к координатам виртуального объекта при штатном движении приращений соответствующих координат движения самолета относительно их начальных значений, умноженных на отношение виртуальной системы индикации посадки на пилотажном индикаторе летчика, который осуществляет ручное визуальное управление посадкой на виртуальный объект, выполняя полет по виртуальной посадочной глиссаде путем управления угловым положением самолета и приборной скоростью самолета до момента пересечения траектории тормозного гака с взлетно-посадочной полосой (ВПП) виртуального объекта в зоне касания ВПП.
2. Способ летного моделирования ручной визуальной посадки самолета на объект по п.1, отличающийся тем, что для обеспечения летного моделирования посадки при наличии ветра относительно объекта к координатам виртуального объекта прибавляют интегралы соответствующих составляющих вектора скорости ветра относительно объекта.
| СПОСОБ ФОРМИРОВАНИЯ ПИЛОТАЖНО-НАВИГАЦИОННОЙ ИНФОРМАЦИИ НА МНОГОФУНКЦИОНАЛЬНОМ ИНДИКАТОРЕ ДЛЯ ВЫПОЛНЕНИЯ ПОСАДКИ | 2005 |
|
RU2297596C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 1993 |
|
RU2124760C1 |
| Способ сушки и консервирования дерева | 1933 |
|
SU39960A1 |
| Близнюк В., Васильев Л., Вуль В | |||
| и др | |||
| Правда о сверхзвуковых пассажирских самолетах | |||
| - Московский рабочий, 2000. | |||

