Область техники.
Изобретение относится к области авиации, более конкретно к приборному оборудованию, и может быть использовано в приборном оборудовании летательного аппарата для уменьшения шума, сокращения времени, расстояния и расхода топлива при заходе на посадку, упрощения восприятия и переработки приборной информации летчиком, для повышения безопасности полета и посадки самолетов, особенно в условиях полета по приборам.
Уровень техники.
Известно, что на каждом конкретном аэродроме существует своя схема захода на посадку, на которой определен маршрут захода и на этом маршруте определены высоты, которые должен выдерживать экипаж при пролете определенных пунктов маршрута. Эти высоты установлены с большим запасом потому, что современные навигационные системы не формируют глиссаду снижения до выхода самолета на посадочный курс. Так, например, схема захода на посадку "NUKRO 25" аэропорта Schonefeld (Берлин, Германия) предусматривает выход самолета в точку начального захода на посадку (IAF "NUKRO") на высоте 4000 футов (1200 м - фиг.1). Расстояние от NUKRO до точки конечного этапа захода на посадку (FAF "LILKI") по схеме захода составляет 58,8 миль (109 км - фиг.1). Схема предписывает проход точки LILKI на высоте 3000 футов (1000 м) и начало снижения по глиссаде на посадочном курсе (ПК=247°) с этой высоты (удаление до ВПП ≈ 20 км). Таким образом, схема захода на посадку "NUKRO 25" аэропорта Schonefeld (Берлин, Германия) предусматривает снижение с высоты 1200 м (IAF "NUKRO") до высоты 1000 м (FAF "LILKI") на маршруте протяженностью 109 км (почти горизонтальный полет), выход на посадочный курс на удалении 35 км на высоте 1000 м и начало снижения по глиссаде с удаления около 20 км (Еще 15 км горизонтального полета). Заход выполняется в соответствии с национальными правилами полетов в воздушном пространстве Германии: с удаления менее 20 NM до ВПП Vпр≤210±10 kt, с удаления менее 12 NM до ВПП Vпр≤160±10 kt при выпущенных во взлетное (промежуточное) положение закрылках, если это требуется для сохранения приемлемого угла атаки. При выполнении этих правил снижение по глиссаде выполняется на пониженных режимах работы двигателей до момента выпуска шасси и закрылков в посадочное положение (непосредственно перед или над Outer Marker - поз. 3 на фиг.1). Однако снижению по глиссаде предшествует горизонтальный полет. Выпуск закрылков приводит к уменьшению аэродинамического качества и, следовательно, к повышенным режимам работы двигателей в горизонтальном полете (перед входом в глиссаду снижения). Это одна из причин входа в глиссаду на большой высоте (1000-1200 м), т.е. дальше от местных жителей, страдающих от шума. Однако сама глиссада снижения формируется только на посадочном курсе, что существенно увеличивает длину захода на посадку и тем самым увеличивает площадь поверхности земли, подвергающейся воздействию шума заходящих на посадку самолетов. Кроме того, всякое удлинение маршрута ведет к увеличению продолжительности полета и расхода топлива.
Современные навигационные системы с высокой точностью измеряют дальность и боковое уклонение от оси ВПП. (В приведенном примере схема захода на посадку "NUKRO 25" применяется экипажами самолетов, оборудованных системами GPS или FMS.) Снижение и полет по схеме захода выполняют обычными способами, т.е. по планкам положения, в директорном или автоматическом режимах, но не в посадочной конфигурации до пролета заданного рубежа (Outer Marker). Кроме того, существуют способы снижения самолетов при заходе на посадку, предусматривающие начальное снижение по крутой глиссаде (Угол наклона глиссады εГ≈5°), а затем снижение по стандартной конечной глиссаде. Разновидностью такого способы является снижение по трехсегментной глиссаде, при котором снижению по крутой глиссаде предшествует снижение в полетной конфигурации по пологой глиссаде (Угол наклона глиссады εГ≈1,5°). Однако все эти способы применяются при снижении на посадочном курсе, т.е. не обеспечивают сокращение маршрута, времени полета и площади поверхности земли, подвергающейся воздействию шума.
На практике указанная для примера и подобная ей схемы используются редко ввиду возросшей за последнее десятилетие интенсивности полетов. Заход на посадку чаще выполняется "векторением" - т.е. по командам наземного диспетчера. Однако и в этом случае диспетчер выводит ВС (Воздушное Судно) на удаление 20-30 км от ВПП и еще раньше снижает ВС на высоту 1000-1200 м, что приводит к длительному горизонтальному полету на повышенных режимах работы двигателей (как указано выше), т.е. к излишнему шуму, расходу топлива, увеличению времени полета и длины маршрута захода на посадку. Это связано с тем, что не решается задача формирования глиссады снижения на неизвестных заранее углах выхода на посадочный курс и удалениях от ВПП. Таким образом, задача уменьшения шума, сокращения маршрута, времени захода на посадку и расхода топлива остается актуальной.
На современных самолетах широко используются электронные (жидкокристаллические) индикаторы, на которых обеспечивается формирование и индикация сигналов изображения ВПП с осевой линией и схемой захода на посадку. Известно, что при полете по маршруту на самолетах В-747, В-767 на индикаторе (карте) пролетаемой местности индицируется прогноз траектории движения самолета на 10, 20 или 30 с, в зависимости от масштаба карты. Однако указанный прогноз не позволяет судить о высоте полета, положении самолета относительно заданной глиссады снижения, и быть может поэтому не использовался для захода на посадку.
Известен «Способ автономного формирования посадочной информации для летательного аппарата и устройство для его осуществления», патент SU 1836642 A3, кл. G 01 S 13/00, опубл. 23.08.1993. В указанном «Способе...» «...измеряют в каждом периоде повторения зондирующих импульсов дальность до подстилающей поверхности в направлении линии визирования, установленной по оси наклона под углом места, равным углу наклона глиссады к плоскости горизонта и стабилизированной по тангажу, воспроизводят полученные дальности на экране индикатора в виде линейной метки дальности и определяют по экрану индикатора отклонение по дальности изображения начала взлетно-посадочной полосы относительно этой метки...». Такой способ формирования «линейной метки дальности» может быть использован для снижения по заданной глиссаде только на посадочной прямой, что не обеспечивает сокращения траектории захода на посадку.
Известен способ выполнения снижения при заходе на посадку, включающий измерение и индикацию параметров полета: высоты, истинной скорости, курса, путевой скорости, угла сноса, дальности до взлетно-посадочной полосы (ВПП), бокового уклонения от оси ВПП, а также формирование и индикацию сигналов изображения ВПП со схемой захода на посадку, выбор схемы (траектории) захода на посадку, полет по выбранной схеме (траектории) к 4-му развороту, 4-й разворот, снижение по заданной глиссаде [М.А.Черный, В.И.Кораблин. «Воздушная навигация». М.: Транспорт, 1991, стр.353-358].
Такой способ предусматривает снижение по выбранной схеме сначала до высоты круга, затем выполнение 4-го разворота на высоте круга, выпуск шасси и закрылков в горизонтальном полете и только после этого начало снижения по заданной глиссаде. Некоторые разновидности известного способа («Заход на посадку по малому прямоугольному маршруту») предусматривают выпуск шасси и закрылков перед 4-м разворотом. Но в любом случае начало снижения по заданной глиссаде этот и подобные ему способы предусматривают только после выхода на посадочный курс, что и ведет к удлинению маршрута, повышенному шуму и расходу топлива.
Сущность изобретения.
Задачей изобретения является создание такого способа выполнения снижения при заходе на посадку, который обеспечивал бы уменьшение шума, сокращение длины маршрута, времени и расхода топлива при заходе на посадку, упрощения восприятия и переработки приборной информации летчиком, для повышения безопасности полета и посадки самолетов, особенно в условиях полета по приборам.
Поставленная задача достигается тем, что в способе выполнения снижения при заходе на посадку, включающем измерение и индикацию параметров полета: высоты, истинной скорости, курса, путевой скорости, угла сноса, дальности до взлетно-посадочной полосы (ВПП), бокового уклонения от оси ВПП, а также формирование и индикацию сигналов изображения ВПП, проекции прогнозируемой траектории полета на горизонтальную плоскость, полет к 4-му развороту, 4-й разворот, снижение по заданной глиссаде, при заходе на посадку из произвольной точки с произвольным курсом полета к осевой линии ВПП,
- определяют расчетные точки начала и окончания 4-го разворота в зависимости от скорости полета, ветра, угла разворота на посадочный курс и заранее определенного крена;
- определяют развернутую дальность до ВПП как сумму расстояний от самолета до 4-го разворота, длины пути на развороте и расстояния от расчетной точки окончания 4-го разворота до ВПП;
- по развернутой дальности и заданным в зависимости от дальности углам наклона глиссады (при заходе на посадку по малошумным многосегментным траекториям) определяют расчетную высоту полета, сравнивают ее с фактической высотой полета и формируют сигнал рассогласования, который подают на планку отклонения от глиссады навигационно-пилотажного прибора и выполняют снижение, управляя вертикальной скоростью снижения таким образом, чтобы планка отклонения от глиссады находилась в нулевом положении.
Сигнал рассогласования, пропорциональный разности между фактической и расчетной высотой полета, подают также в автопилот (систему автоматического управления САУ), где преобразуют его в управляющий сигнал в соответствии с заложенным в САУ (автопилот) законом управления и подают его как на директорную стрелку тангажа командно-пилотажного прибора, так и на исполнительные механизмы, управляющие рулем высоты самолета.
Кроме того, по фактической высоте полета и заданным в зависимости от высоты углам наклона глиссады определяют глиссадную дальность, сравнивают ее с развернутой дальностью полета до ВПП и формируют сигнал рассогласования по дальности, который в виде глиссадной метки дальности индицируют на осевой линии ВПП. По достижении меткой глиссадной дальности торца ВПП начинают снижение, управляя вертикальной скоростью снижения самолета таким образом, чтобы удерживать метку глиссадной дальности на изображении торца ВПП.
Метку глиссадной дальности формируют и индицируют также на прогнозируемой траектории полета, а саму прогнозируемую траекторию полета (проекцию на горизонтальную плоскость) формируют и индицируют в виде масштабных меток высоты и дальности, представляющих положение самолета через расстояния, пропорциональные заданному углу наклона глиссады снижения и изменению высоты полета на равные промежутки  в виде пунктирной линии, масштабные метки через каждые 10 равных промежутков высоты индицируют дополнительно поперечными черточками, по количеству указанных масштабных меток судят как о высоте полета (расстояние между поперечными черточками соответствует высоте 100 м), так и о дальности до ВПП, а на малых высотах продолжают формирование и индикацию прогнозируемой траектории полета за пределами метки глиссадной дальности, но без масштабных меток высоты и дальности (в виде сплошной линии) так, чтобы общая дальность «прогноза» была не менее 6-7 км, при выполнении разворота подбирают крен таким образом, чтобы кривая проекции прогнозируемой траектории полета на горизонтальную плоскость касалась (не пересекала) осевой линии ВПП.
в виде пунктирной линии, масштабные метки через каждые 10 равных промежутков высоты индицируют дополнительно поперечными черточками, по количеству указанных масштабных меток судят как о высоте полета (расстояние между поперечными черточками соответствует высоте 100 м), так и о дальности до ВПП, а на малых высотах продолжают формирование и индикацию прогнозируемой траектории полета за пределами метки глиссадной дальности, но без масштабных меток высоты и дальности (в виде сплошной линии) так, чтобы общая дальность «прогноза» была не менее 6-7 км, при выполнении разворота подбирают крен таким образом, чтобы кривая проекции прогнозируемой траектории полета на горизонтальную плоскость касалась (не пересекала) осевой линии ВПП.
Такой способ выполнения захода на посадку обеспечивает уменьшение шума, сокращение времени, расстояния и расхода топлива при заходе на посадку, упрощает восприятие и переработку приборной информации летчиком, повышает тем самым безопасность полета и посадки самолетов, особенно в условиях полета по приборам.
Перечень чертежей
Фиг.1 показывает схему захода на посадку на ВПП 25 (левая) аэродрома Schonefeld (Берлин, Германия (прототип)).
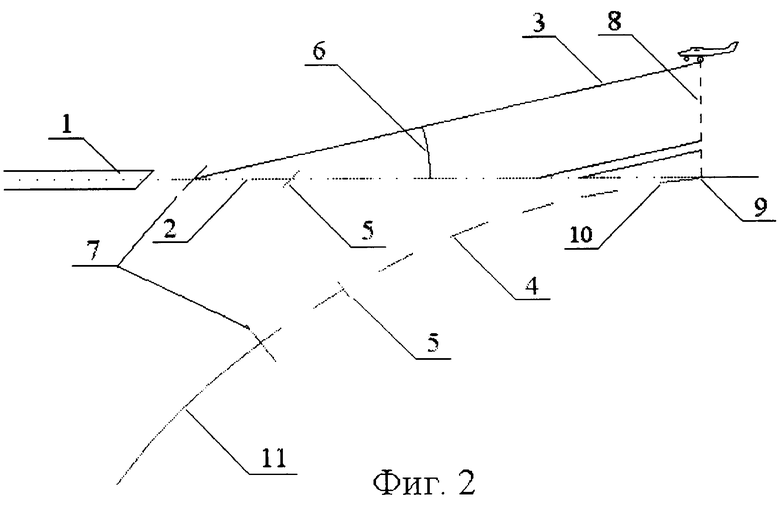
Фиг.2 показывает, в соответствии с изобретением, схему формирования метки глиссадной дальности, масштабных меток высоты и дальности в зависимости от заданного угла наклона глиссады и текущей высоты полета.
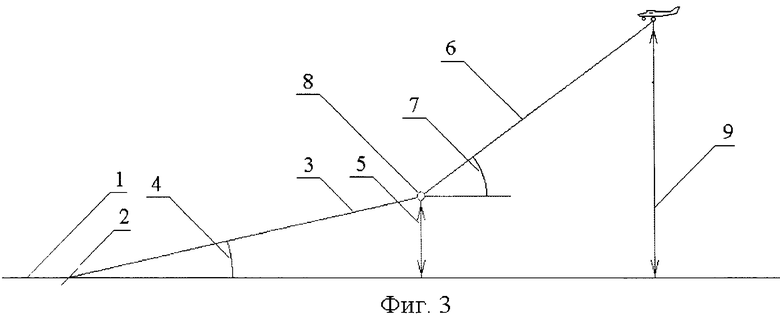
Фиг.3 показывает, в соответствии с изобретением, схему формирования метки глиссадной дальности при снижении самолета по двухсегментной глиссаде.
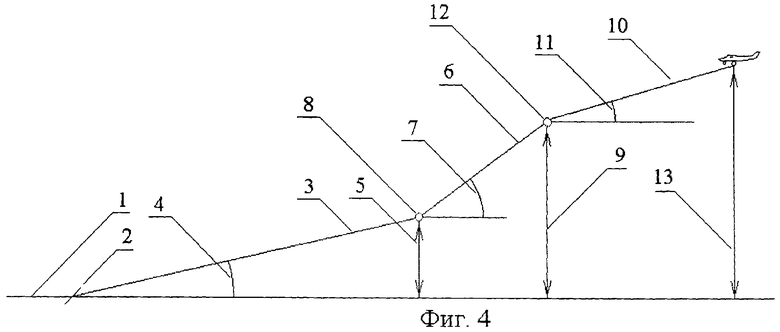
Фиг.4 показывает, в соответствии с изобретением, схему формирования метки глиссадной дальности при снижении самолета по трехсегментной глиссаде.
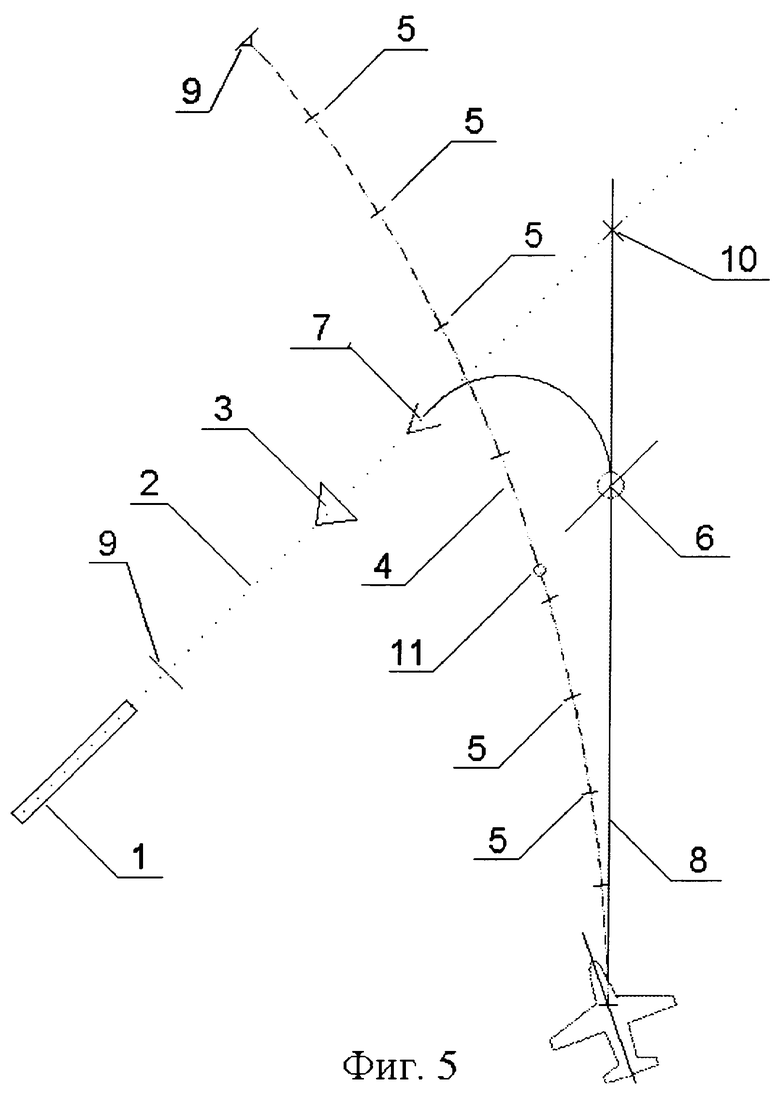
Фиг.5 показывает, в соответствии с изобретением, схему захода на посадку и положение самолета при полете к 4-му развороту, которые индицируются на индикаторе в кабине экипажа.
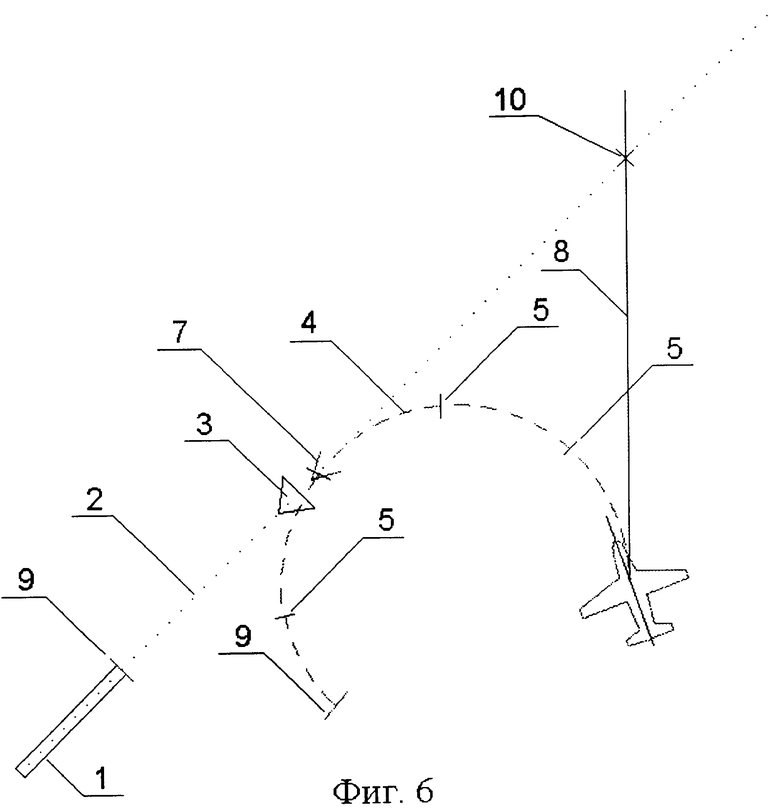
Фиг.6 показывает, в соответствии с изобретением, схему захода на посадку и положение самолета при выполнении 4-го разворота, которые индицируются на индикаторе в кабине экипажа.
На фиг.1 обозначено:
1 - ВПП (25 левая).
2 - Внешний Радио Маркер (точка (рубеж) выпуска шасси и закрылков в посадочное положение).
3 - ППМ (Поворотный Пункт Маршрута).
4 - Название ППМ.
5 - Заданная приборная скорость (220 kt≈407 км/час).
6 - Заданная высота полета.
7 - Название схемы захода с номером ВПП (NUKRO 25).
8 - Расстояние между ППМ.
На фиг.2 обозначено:
1 - ВПП.
2 - Проекция прогнозируемой траектории полета на горизонтальную плоскость при полете без крена и скольжения.
3 - Заданная глиссада снижения.
4 - Проекция прогнозируемой траектории полета на горизонтальную плоскость при левом развороте.
5 - Масштабные метки, пропорциональные изменению высоты на 100 м.
6 - Заданный угол наклона глиссады снижения.
7 - Метка глиссадной дальности.
8 - Отрезки, пропорциональные изменению высоты на 10 м.
9 - Точка с координатами (Х0, Z0).
10 - Точка с координатами (X1, Z1).
На фиг.3 обозначено:
1 - Уровень ВПП.
2 - Метка глиссадной дальности.
3 - Конечная глиссада снижения.
4 - Угол наклона конечной глиссады снижения (εГ1).
5 - Заданная высота входа в конечную глиссаду снижения (Н1).
6 - Начальная глиссада снижения.
7 - Угол наклона начальной глиссады снижения (εГ2).
8 - Точка перехода от начальной к конечной глиссаде снижения (точка перелома глиссад).
9 - Относительная высота полета (Н).
На фиг.4 обозначено:
1 - Уровень ВПП.
2 - Метка глиссадной дальности.
3 - Конечная глиссада снижения.
4 - Угол наклона конечной глиссады снижения (εГ1).
5 - Заданная высота входа в конечную глиссаду снижения (H1).
6 - Промежуточная глиссада снижения.
7 - Угол наклона промежуточной глиссады снижения (εГ2).
8 - Точка перехода от промежуточной к конечной глиссаде снижения.
9 - Заданная высота входа в промежуточную глиссаду снижения (Н2).
10 - Начальная глиссада снижения.
11 - Угол наклона начальной глиссады снижения (εГ3).
12 - Точка перехода от начальной к промежуточной глиссаде снижения.
13 - Относительная высота полета (Н).
На фиг.5, 6 обозначено:
1 - ВПП.
2 - Осевая линия ВПП.
3 - Метка рубежа выпуска шасси и закрылков в посадочное положение.
4 - Проекция прогнозируемой траектории полета на горизонтальную плоскость.
5 - Масштабные метки, пропорциональные изменению высоты на 100 м.
6 - Расчетная точка (рубеж) начала 4-го разворота.
7 - Расчетная точка (метка) окончания 4-го разворота.
8 - Вектор путевой скорости полета.
9 - Метка глиссадной дальности.
10 - Точка пересечения вектора путевой скорости полета с осевой линией ВПП.
11 - Точка перехода от начальной к конечной глиссаде снижения (точка перелома глиссад).
12 - Расчетное боковое уклонение начала 4-го разворота Z4.
13 - Угол разворота ΔΨ.
Сведения, подтверждающие возможность осуществления изобретения.
Способ выполнения снижения при заходе на посадку реализуется следующим образом. В процессе полета измеряют и индицируют параметры полета: высоту, истинную скорость, крен, тангаж, курс, путевую скорость, угол сноса, а также удаление и боковое уклонение от взлетно-посадочной полосы (ВПП). На плановом индикаторе (вид сверху) изображение пролетаемой местности (ВПП (поз.1 на фиг.5, 6) с осевой линией и ее продолжением (поз.2 на фиг.5, 6)) и прогнозируемую траекторию полета в горизонтальной плоскости (поз.4 на фиг.5, 6) стабилизируют вдоль вектора путевой скорости (поз.8 на фиг.5, 6). На Индикаторе на Лобовом Стекле (ИЛС) изображение ВПП с осевой линией и прогнозируемой траекторией полета формируют и индицируют так, чтобы формируемое изображение ВПП совпадало с реальной ВПП, наблюдаемой летчиком из кабины. На пилотажном индикаторе (вид вперед) изображение ВПП с осевой линией и прогнозируемую траекторию полета в горизонтальной плоскости формируют так же, как и на ИЛС. На пилотажном индикаторе допускается стабилизация указанных изображений вдоль вектора путевой скорости полета.
Формируют проекцию прогнозируемой траектории полета на горизонтальную плоскость.
Проекцию прогнозируемой траектории полета на горизонтальную плоскость (поз.4 на фиг.5, 6), т.е. прогноз места самолета и его курса в зависимости от ветра, крена, путевой скорости и перегрузки, формируют и индицируют в виде пунктирной линии (масштабных меток высоты и дальности, количество которых соответствует текущей высоте полета), представляющей собой в штиль дугу окружности радиуса r. При полете с нулевым креном и скольжением проекция прогнозируемой траектории полета на горизонтальную плоскость представляет собой прямую (пунктирную) линию. Расчет выполняют методом кусочно-линейного интегрирования в прямоугольной системе координат (ось Х - вдоль продольной оси самолета, ось Z - под углом 90° к продольной оси) по формулам:


где

V - Истинная скорость полета [м/с].
g=9.81 - ускорение свободного падения [ ].
].
γ - угол крена.
ϑ - угол тангажа.
nу - вертикальная перегрузка.
nz - боковая перегрузка.
ux1 - продольная составляющая скорости ветра.
uz2 - поперечная составляющая скорости ветра.
ε - угол наклона глиссады.
dH=10 м - шаг интегрирования (цена деления масштабных меток высоты и дальности).
r - радиус разворота в данный момент времени.
Проводя отрезки прямых линий между точками (Х0, Z0) и (Х1, Z1), (X2, Z2) и (X3, Z3)... одним цветом, а между точками (Х1, Z1) и (Х2, Z2), (Х3, Z3) и (Х4, Z4)... другим цветом (один из цветов может быть цветом фона), получают пунктирную линию прогнозируемой траектории полета, выполненную в виде масштабных меток высоты и дальности. Цена деления каждой черточки при этом равна шагу интегрирования dH=10 м и соответствует расстоянию  . Проводя отрезки прямых линий перпендикулярно прогнозируемой траектории полета в точках (X10, Z10), (X20, Z20), ..., (через каждую десятую точку) получают поперечные черточки, пропорциональные сотням метров высоты полета.
. Проводя отрезки прямых линий перпендикулярно прогнозируемой траектории полета в точках (X10, Z10), (X20, Z20), ..., (через каждую десятую точку) получают поперечные черточки, пропорциональные сотням метров высоты полета.
В точке, соответствующей  проводят поперечную черточку - метку глиссадной дальности. Количество черточек от самолета до глиссадной метки дальности соответствует высоте полета. Для индикации прогнозируемой траектории на малых высотах продолжают проводить некоторое количество отрезков прямых линий между точками (Xn, Zn) и (Xn+1, Zn+1...) и (Xn+2, Zn+2...), и ... (Xn+k, Zn+k) ... одним цветом. Может быть выбран и другой шаг интегрирования. Например, при измерении высоты в футах удобнее может быть dH=50 футов.
проводят поперечную черточку - метку глиссадной дальности. Количество черточек от самолета до глиссадной метки дальности соответствует высоте полета. Для индикации прогнозируемой траектории на малых высотах продолжают проводить некоторое количество отрезков прямых линий между точками (Xn, Zn) и (Xn+1, Zn+1...) и (Xn+2, Zn+2...), и ... (Xn+k, Zn+k) ... одним цветом. Может быть выбран и другой шаг интегрирования. Например, при измерении высоты в футах удобнее может быть dH=50 футов.
Прогнозируемую траекторию полета используют для разворота на посадочный курс (на новую линию заданного пути), подбирая в развороте крен таким образом, чтобы кривая проекции прогнозируемой траектории полета на горизонтальную плоскость касалась осевой линии ВПП. Кроме того, прогнозируемую траекторию полета используют для оценки высоты полета по количеству масштабных меток высоты и дальности. Выполненная таким способом прогнозируемая траектория полета может быть использована для управления самолетом и оценки высоты пролета препятствий при выполнении маловысотного полета.
При полете к 4-му развороту определяют возможную траекторию захода на посадку.
Заход на посадку начинают после снижения ниже высоты эшелона перехода и установки на высотомерах давления ВПП. Маршрут захода на посадку выбирает диспетчер. Возможны два типа маршрутов захода на посадку:
- по заранее известной схеме (см., например, фиг.1);
- векторением.
При «векторении» диспетчер задает экипажу высоту снижения и курс полета к 4-му развороту, а на борту определяют и индицируют на экране монитора в кабине экипажа возможную траекторию захода на посадку, которая состоит из прямолинейного участка полета вдоль вектора путевой скорости полета и прямолинейного участка полета вдоль оси ВПП, связанных между собой кривой разворота, имеющей расчетную (с учетом ветра) точку начала разворота на векторе путевой скорости и точку окончания разворота на оси ВПП.
1. Определяют расчетную точку начала разворота.
Расчетную точку начала 4-го разворота (поз.6 на фиг.5) на векторе путевой скорости полета (поз.8 на фиг.5) определяют и индицируют в виде специальной метки, удаленной от оси ВПП на расстояние Z4:

где
Z4 - расчетное боковое уклонение начала 4-го разворота (поз.12 на фиг.5).
ΔΨ - угол разворота [радиан] (поз.13 на фиг.5).
V - истинная скорость полета [м/с].
 - ускорение свободного падения.
- ускорение свободного падения.
γ4 - расчетный угол крена (задается заранее, например γ=25°).
Uz - составляющая ветра под углом 90° к ВПП [м/с].
ΔZ - поправка на реакцию летчика и ввод - вывод из крена на развороте.
2. Определяют расчетную точку окончания разворота.
Точку окончания разворота (поз.7 на фиг.5, 6) индицируют в виде метки (стрелки), находящейся на продолжении осевой линии ВПП (поз.2 на фиг.5, 6) и удаленной от точки пересечения вектора путевой скорости полета с осевой линией ВПП (поз.10 на фиг.5, 6) на расстояние

где
ΔΨ - угол разворота [радиан].
Pi - отношение длины окружности к диаметру.
UХ - составляющая скорости ветра вдоль ВПП [м/с].

R - радиус разворота с заданным креном в штиль [м].
Определяют дальность полета до ВПП («развернутую дальность»).
Дальность полета по заранее известному маршруту определяют как сумму длин участков полета между ППМ (как показано на фиг.1, поз.8) плюс дальность до очередного ППМ, которая определяется во всех современных навигационных системах. Развернутую дальность полета до ВПП при полете к 4-ому развороту с произвольным курсом определяют как сумму расстояний до 4 разворота, длины пути на развороте и расстояния от расчетной точки окончания 4-го разворота до ВПП:
1. Определяют расстояние до 4 разворота:

2. Определяют расчетную длину пути на 4 развороте:



3. Определяют расчетное расстояние от точки окончания 4-го разворота до ВПП:

где
Х0, Z0 - координаты самолета относительно ВПП.
(Х0 - Расстояние вдоль оси ВПП от торца ВПП до самолета,
Z0 - боковое уклонение самолета от оси ВПП).

М - коэффициент шага интегрирования (М=20-50).
4. Развернутую дальность до ВПП определяют, суммируя полученные промежуточные значения дальностей до, после и на 4 развороте:

Определяют глиссадную дальность.
Глиссадная дальность - это дальность полета самолета при следовании по заданной глиссаде с текущей высоты. Она не зависит от траектории захода на посадку, а зависит только от текущей высоты полета и заданного угла наклона глиссады снижения:

где:
Н - относительная высота полета;
εГ - заданный угол наклона глиссады снижения (поз.6 на фиг.2).
При выполнении снижения по двухсегментной глиссаде глиссадную дальность определяют как сумму дальностей снижения с каждым углом наклона глиссады:

где:
εГ1 - заданный угол наклона конечной глиссады снижения (поз.4 на фиг.3).
εГ2 - заданный угол наклона начальной глиссады снижения (поз.7 на фиг.3).
H1 - заданная высота входа в конечную глиссаду снижения (поз.5 на фиг.3)
При снижении ниже заданной высоты входа в конечную глиссаду H1 глиссадную дальность определяют по формуле 14.
При выполнении снижения по трехсегментной глиссаде глиссадную дальность определяют аналогично:

При снижении ниже заданной высоты входа в промежуточную глиссаду Н2 глиссадную дальность определяют по формуле 15.
На определенной в соответствии с формулой 14 (15 или 16, в зависимости от применяемой глиссады снижения) дальности на расчетной траектории полета формируют и индицируют метку глиссадной дальности (поз.7 на фиг.2, поз.2 на фиг.3, 4, поз.9 на фиг.5, 6). При заходе на посадку по 3-сегментной глиссаде экипаж выполняет снижение до заданной высоты и, следуя с заданным курсом к 4-му развороту, продолжает полет в полетной конфигурации до тех пор, пока метка глиссадной дальности не приблизится к изображению торца ВПП (как показано на фиг.5). При подходе метки глиссадной дальности к изображению торца ВПП начинают снижение с таким расчетом, чтобы за время перехода на снижение метка глиссадной дальности совпала с изображением торца ВПП. Снижение продолжают, управляя вертикальной скоростью снижения таким образом, чтобы удерживать метку глиссадной дальности на изображении торца ВПП. При управлении самолетом в ручном режиме определяют отклонение метки глиссадной дальности от торца ВПП по изображению их на экране монитора в кабине экипажа. В случае перемещения метки глиссадной дальности за торец ВПП увеличивают вертикальную скорость снижения, отклоняя штурвалом или ручкой управления (от себя) руль высоты на пикирование. При случайном отклонении метки глиссадной дальности от торца ВПП ближе к самолету вертикальную скорость снижения уменьшают, отклоняя штурвалом или ручкой управления (на себя) руль высоты на кабрирование. При снижении с расчетной вертикальной скоростью метка глиссадной дальности располагается на изображении торца ВПП и вмешательство в управление не требуется.
При управлении самолетом в директорном или автоматическом режимах развернутую дальность сравнивают с глиссадной дальностью и подают сигнал рассогласования с целью его обнуления в вычислитель автопилота (САУ), который формирует управляющий сигнал известными способами, описанными в литературе [см., например: Михалев И.А., Окоемов Б.Н., Павлина И.Г., Чикулаев М.С., Киселев Ю.Ф. Системы автоматического и директорного управления самолетом. М.: Машиностроение, 1974]. Сигнал рассогласования по дальности отличается от сигнала рассогласования по высоте коэффициентом усиления:

Сигнал рассогласования по дальности или по высоте преобразуют в САУ (автопилоте) в управляющий сигнал, отклоняющий через исполнительные механизмы руль высоты самолета, что, в свою очередь, приводит к изменению вертикальной скорости полета в соответствии с заложенным в САУ (автопилот) законом управления. При нулевом рассогласовании между развернутой и глиссадной дальностями метка глиссадной дальности располагается на изображении торца ВПП, что свидетельствует о снижении по расчетной глиссаде.
При подходе к высоте перехода на крутую промежуточную глиссаду снижения, что определяется по метке перелома глиссад (поз.11 на фиг.5), экипаж выпускает механизацию крыла в положение, при котором приведенное (на малом газе) аэродинамическое качество не больше, чем величина, обратная тангенсу угла наклона промежуточной глиссады снижения, т.е.
После выпуска механизации крыла в промежуточное положение экипаж продолжает снижение и полет к 4-му развороту, как указано выше.
При полете к 4-му развороту сравнивают измеренное навигационной системой боковое уклонение с рассчитанным значением Z4 и при боковом уклонении от оси ВПП, меньшем, чем Z4, формируют сигнал на начало 4 разворота: индицируют на экране и подают в наушники (телефоны) летчика команду: «Четвертый влево, сэр!». По этой команде выполняют разворот в сторону ВПП, подбирая крен таким образом, чтобы кривая проекции прогнозируемой траектории полета на горизонтальную плоскость касалась (не пересекала) осевой линии ВПП (как показано на фиг.4). В вертикальной плоскости продолжают управление самолетом таким образом, чтобы удерживать метку глиссадной дальности на изображении торца ВПП (как показано на фиг.6).
После окончания 4-го разворота продолжают управление по курсу таким образом, чтобы обеспечить совпадение «прогноза» с осевой линией ВПП и при подходе к метке рубежа (поз.3 на фиг.6), выпускают шасси и закрылки в посадочное положение. Управление по тангажу продолжают таким образом, чтобы удерживать метку глиссадной дальности на изображении торца ВПП (как указано выше). Аналогичным образом выполняют снижение при заходе на посадку по двухсегментной и односегментной глиссадам.
При заходе на посадку по заранее известной схеме метку глиссадной дальности индицируют на заданной траектории захода на посадку. При управлении в горизонтальной плоскости выдерживают заданную траекторию обычными способами, т.е. в ручном, директорном или автоматическом режимах управления. При выполнении полета следят за положением метки глиссадной дальности относительно изображения ВПП, и при подходе метки глиссадной дальности к изображению торца ВПП начинают снижение, как указано выше. Шасси и закрылки выпускают в местах, предписанных схемой захода на посадку.
Предлагаемый способ может быть реализован на вновь создаваемых и существующих самолетах, оборудованных известными приборами и системами для измерения параметров полета, а также бортовым вычислителем и дисплеями. Реализация способа без прогнозируемой траектории полета возможна и на электромеханических приборах. В этом случае пилотирование в ручном, директорном и автоматическом режимах выполняют так, как указано выше.
Проведенное моделирование на наземном пилотажном стенде показало возможность выполнения снижения по глиссаде при полете к 4-му развороту (т.е. до выхода на посадочный курс), в процессе и после разворота, используя для этого метку глиссадной дальности, возможность выполнения 4-го разворота значительно ближе к ВПП (порядка 4 км), чем это принято в стандартных схемах захода на посадку (20-30 км), т.е. уменьшения шума, сокращения времени, расстояния и расхода топлива при заходе на посадку. Было отмечено упрощение восприятия и переработки приборной информации летчиком за счет наглядного представления прогноза полета самолета в зависимости от управляющих воздействий летчика, отмечена наглядность представления о высоте полета и дальности до ВПП по масштабным меткам высоты и дальности, в виде которых выполнена прогнозируемая траектория полета. Все это способствует повышению безопасности полета и посадки самолетов, особенно в условиях полета по приборам.
14.08.2002 г. выполнены успешные заходы на посадку указанным способом на ЛЛ Ту-154 №85 317 летчиком-испытателем Александровым В.К., 15.08.2002 г. - летчиком-испытателем Бирюковым В.В., в которых были подтверждены результаты, полученные при моделировании на наземном стенде. В этих полетах выполнялось снижение по глиссаде при заходе на посадку до начала 4-го разворота, в развороте и на прямой, используя метку глиссадной дальности. 4-й разворот заканчивался на удалении 4,5 км от торца ВПП. В экспериментах использовался только навигационный дисплей, на котором дополнительно индицировался авиагоризонт, высотомер (счетчик), вариометр (ленточный со счетчиком), счетчик приборной скорости полета и счетчик путевого угла. Для обеспечения безопасности полета рабочее место правого летчика на ЛЛ Ту-154 №85317 оборудовано стандартными приборами и органами управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ЗАХОДА НА ПОСАДКУ | 2008 |
|
RU2364943C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2520872C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ КОНТРОЛЯ СНИЖЕНИЯ ПРИ ПОСАДКЕ ВОЗДУШНОГО СУДНА В УСЛОВИЯХ ОТСУТСТВИЯ ВИЗУАЛЬНОЙ ВИДИМОСТИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2016 |
|
RU2631264C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА НЕЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2546550C1 |
Изобретение относится к области авиации, в частности к приборному оборудованию, и может быть использовано для оснащения летательных аппаратов. Способ заключается в выполнении снижения летательного аппарата по глиссаде при заходе на посадку при полете к 4-му развороту, из произвольной точки с произвольным курсом, в процессе 4-го разворота и на посадочной прямой в автоматическом, директорном и ручном режимах управления полетом. Для этого при заходе на посадку определяют параметры полета, определяют возможную траекторию полета с расчетными точками разворотов летательного аппарата при выполнении маневров в зависимости от параметров полета и заранее установленных величин - величины крена и угла наклона глиссады, определяют требуемую высоту полета, сравнивают с фактической и формируют сигнал в навигационно-пилотажной системе управления летательным аппаратом. При выполнении снижения при заходе на посадку управляют вертикальной скоростью снижения при минимальных отклонениях траектории полета от глиссады посадки. Технический результат заключается в уменьшении шума, сокращении времени, расстояния и расхода топлива при заходе на посадку, повышении безопасности полетов по приборам. 2 н. и 2 з.п. ф-лы, 6 ил.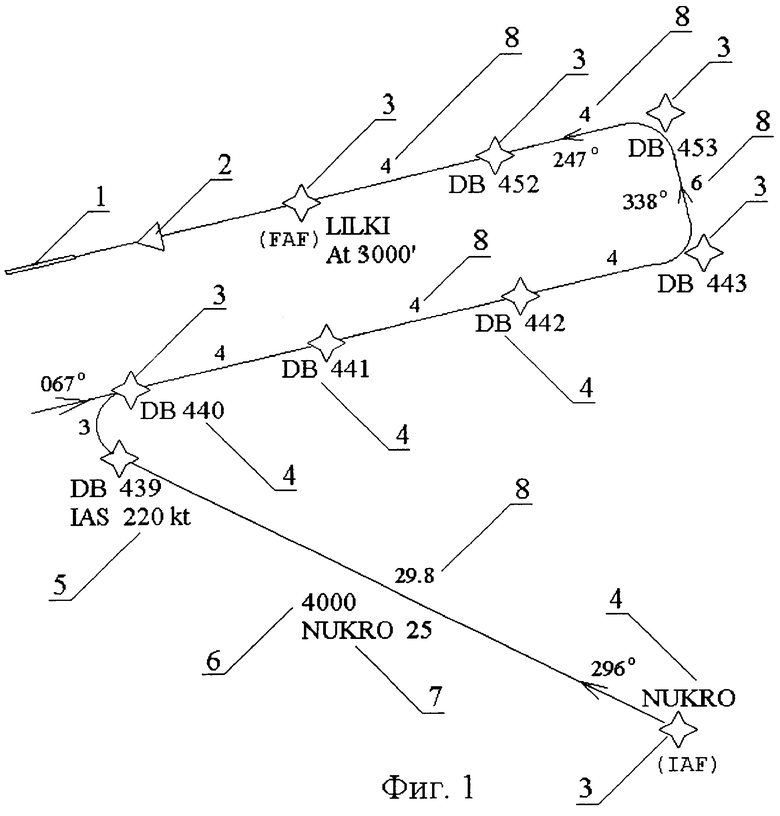
 в виде пунктирной линии, масштабные метки через каждые 10 равных промежутков высоты индицируют дополнительно поперечными черточками, по количеству указанных масштабных меток судят как о высоте полета, так и о дальности до ВПП, а на малых высотах продолжают формирование и индикацию прогнозируемой траектории полета за пределами метки глиссадной дальности, но без масштабных меток высоты и дальности (в виде сплошной линии) так, чтобы общая дальность «прогноза» была не менее 6-7 км, при выполнении разворота подбирают крен таким образом, чтобы кривая проекции прогнозируемой траектории полета на горизонтальную плоскость касалась (не пересекала) осевой линии ВПП.
в виде пунктирной линии, масштабные метки через каждые 10 равных промежутков высоты индицируют дополнительно поперечными черточками, по количеству указанных масштабных меток судят как о высоте полета, так и о дальности до ВПП, а на малых высотах продолжают формирование и индикацию прогнозируемой траектории полета за пределами метки глиссадной дальности, но без масштабных меток высоты и дальности (в виде сплошной линии) так, чтобы общая дальность «прогноза» была не менее 6-7 км, при выполнении разворота подбирают крен таким образом, чтобы кривая проекции прогнозируемой траектории полета на горизонтальную плоскость касалась (не пересекала) осевой линии ВПП.
| Черный М.А., Кораблин В.И | |||
| Воздушная навигация | |||
| М.: Транспорт, 1991, с.356-357 | |||
| Сигнализатор виброускорений | 1991 |
|
SU1836641A3 |
| US 6211809 В1, 03.04.2001 | |||
| US 5420582 А, 30.05.1995. | |||

