Изобретение относится к области информационного и индикационного обеспечения директорного и автоматического (ИИ ДАП) взлета и посадки летательных аппаратов (ЛА). Предназначено для использования в бортовых навигационных системах управления пилотируемыми и беспилотными летательными аппаратами (БЛА).
Уровень техники
Во время пилотирования летчик обязан:
- определять местоположение, направление движения, скорость, высоту, положение относительно выбранных ориентиров, а также скорость изменения вышеперечисленных параметров;
- выполнять управление с учетом ограничений по тактико-техническим характеристикам ЛА и влиянию внешних факторов (которое фактически является условно-оптимальным).
Для решения этих задач в кабине ЛА устанавливается ряд приборов, отображающих необходимую информацию, которые используют данные от информационно-измерительной системы (ИИС). Современные ИИС могут включать в себя различные наземные, воздушные и космические источники информации, приоритетно наиболее точные.
В процессе полета летчик выполняет несколько режимов пилотирования ЛА, в частности, директорный (ручной) и автоматический.
В директорном режиме бортовая цифровая вычислительная система (БЦВС) рассчитывает маневры, которые требуются, чтобы удерживать ЛА на заданной траектории, а индицируемые летчику отклонения от траектории имеют смысл команд, которым он должен следовать, чтобы двигаться по этой траектории.
Контрольную информацию, служащую лишь пусковым сигналом к началу двигательного акта летчик воспринимает и оценивает за время 0,3-0,9 секунды с момента фиксации взгляда на соответствующем приборе и начинает действие по управлению [2] с. 56.
При директорном пилотировании по приборам мозг летчика получает сведения не только о совершении действия, но и получает оценку реализации задуманного в зависимости от совершенства принимаемой информации. В процессе корректировки информации летчик периодически каждые 1-2 секунды, возвращается к показаниям приборов. При этом объективность информации и ее точная интерпретация являются предпосылками успеха или неуспеха совершаемого двигательного действия. Всякое целесообразное действие регулируется при помощи психического образа этого действия и для его выполнения требуются сложные механизмы обратной афферентации и сенсорной коррекции. Кроме этого мозг человека обладает экстрополяционным рефлексом предвидеть еще не наступившее событие (прогнозирование). Образ воспринимаемого объекта регулирует двигательный акт.
Ошибки управления обычно объясняются ошибками или трудностями восприятия, включая переработку информации в связи с запоздалым поступлением характеристик сигналов, пропусками нужной информации, неполнотой и неопределенностью воспринятых сообщений [5] с. 53-55.
Если результаты заданного и фактического состояния совпадают, то двигательный цикл заканчивается, а если нет, то поступает коррекционный импульс к двигательному анализатору. В полете по приборам отрицательное влияние на пространственную ориентировку оказывает дискретность зрительного восприятия приборной информации, связанная с необходимостью регулярного переключения внимания от пилотажных приборов на другие объекты [5] с. 62-69.
При автоматическом режиме, также как в директорном, производится расчет параметров траектории полета и их отображение на КПИ, но их отработка производится системой автоматического управления (САУ). В этом случае происходит перестройка сформированной системы восприятия летчика, так как из общего потока информации выключаются сигналы двигательного анализатора, которые обеспечивают обратную связь о результатах управляющих движений [1, 2, 4, 6]. Ощущение своих усилий на органах управления, восприятие изменений параметров полета в ответ на двигательные воздействия - все это исчезает при автоматизации управления и снижает возможность летчика при переходе от наблюдения за работой САУ к активному управлению в случае отказа или сбоя автоматики. В этих условиях наблюдаются двигательные ошибки, пробные движения органами управления и задержки целесообразных действий на время до 10-30 с, которые необходимо выполнять летчику для восстановления проприоцептивного контроля своих действий. Для сохранения активной деятельности летчика в автоматизированном полете необходимо компенсировать недостаток проприоцептивных сигналов совершенствованием визуальной информации, представлением летчику полных и точных сведений о параметрах полета [1, 2].
Таким образом, для обеспечения любого полета, включающего взлет, полет по маршруту, заход, посадку и пробег, необходимо в комплексе задействовать как технические, так и человеческие ресурсы. При этом возникает естественный барьер, связанный с противоречием: с одной стороны, возрастающей энерговооруженностью, технологической сложностью, эргономической оснащенностью, а с другой стороны - ограниченными интеллектуальными и психофизиологическими возможностями экипажей, включенными в человеко-машинный комплекс "ЛА-летчик", по эффективному применению авиации, получившими наименование "проблема человеческого фактора".
Хотя современные системы индикации и управления обеспечивают значительное улучшение управляемости в отличие от систем предыдущих поколений, все еще существуют существенные недостатки в плане обеспечения наиболее эффективной и безопасной эксплуатации ЛА.
С учетом вышеизложенных соображений, можно констатировать, что требуется постоянное совершенствование систем обеспечения точности полетной информации и управления, а также улучшения качества индикационной и эргономической внутрикабинной обстановки, что позволяет увеличить осведомленность летчика о параметрах полета и повысить безопасность пилотирования.
Источники информации
1. Пономаренко В.А., Завалова Н.Д. Принцип активного оператора в автоматизированных системах управления, с. 830-837. В кн. Психологические основы профессиональной деятельности. Хрестоматия. - М: ПЕР; Логос, 2007, 855 с.
2. Лапа В.В., Пономаренко В.А., Чунтул А.В. Психофизиология безопасности полетов. - М.: МОО "Ассоциация журналистов, пишущих на правоохранительную тематику", 2013, 396 с.
3. Ворона А.А., Гандер Д.В., Пономаренко В.А. Теория и практика психологического обеспечения летного труда. - М: Военное издательство, 2003, 278 с.
4. Рисухин В.Н., Тульский С.Г., Козлов В.В., Кравченко А.В., Ципенко В.Г. Высокоавтоматизированный самолет: теория и практика летной эксплуатации. - М: НОУ Авиационная школа Аэрофлота, 2011, 279 с.
5. Пономаренко В.А. Психология человеческого фактора в опасной профессии. Под ред. М.И. Ботова, - Красноярск, 2006, 617 с.
6. Пономаренко В.А. Авиация. Человек. Дух. - М: Издательский Дом. МАГИСТР-ПРЕСС. 2000. 375 с.
7. Шкурко Н.К., Нараленков М.К., Прядкин С.П. Система индикационных маркеров на командно-пилотажном индикаторе при выполнении директорной и автоматической посадки летательных аппаратов, с. 154-159. Материалы Всероссийской научно-технической конференции "XII Научные чтения, посвященные памяти Н.Е. Жуковского" / Сборник докладов. - М: Издательский дом Академии имени Н.Е. Жуковского, 2015, 494 с.
8. Прядкин С.П., Шевченко Р.А., Шкурко Н.К., Нараленков М.К. Аспекты формирования технического облика директорной и автоматической системы посадки летательных аппаратов. 322-325 с. Материалы Всероссийской научно-технической конференции "XI Научные чтения, посвященные памяти Н.Е. Жуковского" / Сборник докладов. - М: Издательский дом Академии имени Н.Е. Жуковского, 2014, 552 с.
9. Фред Г. Превик (исследовательская лаборатория авиабазы ВВС США, Брукс), Уильям Р. Эрколин (компания Веридиан, авиабаза Брукс). Пересмотр концепции авиагоризонта обратной индикации. Источник: The International Journal of Aviation Psychology, 9(14), 377-401, 1999.
10. Антонович K.M. Использование спутниковых радионавигационных систем в геодезии. В 2-х т. Т. 2. Монография - М.: ФГУП "Картгеоцентр", 2006, 435 с.
11. Поваляев А.А. Спутниковые радионавигационные системы: время, показания часов, формирование измерений и определение относительных координат. - М.: Радиотехника, 2008, 357 с.
12. Сетевые спутниковые радионавигационные системы. Под ред. B.C. Шебшаевича. - М.: "Радио и Связь", 1993, 429 с.
13. Прядкин С.П., Кишко Д.В., Шевченко Р.А. Комбинированный способ определения координат, вектора путевой скорости и дальности авиационно-космических объектов на основе разностно-дальномерного метода. Сборник трудов всероссийской научно-технической конференции "Перспективы развития РЛС дальнего обнаружения, интегрированных систем и комплексов информационного обеспечения воздушно-космической обороны" / Тезисы докладов. 18.06.2014 г, 174-176 с.
14. Авиационная радионавигация. Справочник под ред. Сосновского А.А. - М: Транспорт, 1990, 264 с.
15. Белогородский С.Л. Автоматизация управления посадкой самолета. - М: Транспорт, 1973, 352 с.
16. Воробьев Л.М. Воздушная навигация. - М: Машиностроение, 1984, 256 с.
17. Шаров В.Д. Сравнительная оценка безопасности посадки самолета Ан-124-100 в двух посадочных конфигурациях. Электронный журнал "Труды МАИ". Выпуск №58.
Результаты исследований психофизиологических особенностей деятельности и состояния человека в полете, а также эргономических особенностей авионики излагаются в [1-9]. Описание процессов и процедур формирования заданной траектории захода на посадку с помощью наземных, воздушных и космических технических средств приведено в [10-17].
Изобретение подтверждается чертежами
На фигуре 1 представлен набор основных индикационных маркеров на КПИ, где
1 - координатный указатель аэродрома посадки АЭР 1: курсовой угол ВПП аэродрома посадки - ψпос., широта - ϕ, долгота - λ;
3, 2 - шкала угла атаки "αзад-αтек"
4 - индекс взлетно-посадочной полосы (ВПП);
5 - указатель ветра - U;
6 - информационный указатель выбранной системы посадки: директорная или автоматическая посадка ДАП 6,7, радиоэлектронный комплекс командно-информационного взаимодействия навигации и посадки РЭК КИВ НП - 8, курсоглиссадная система КГС 30, инерциальная навигационная система ИНС (9), спутниковые навигационные системы СНС (GPS/ГЛОНАСС) - 10;
11, 12 - мнемонический указатель "Высота выравнивания" с цифровым индикатором;
13, 15 - индикаторы заданного и текущего путевого угла Ψзад, Ψтек;
14 - шкала вертикальной скорости с цифровым указателем;
16 - цифровой указатель геометрической высоты Нг;
17 - индекс "Самолет-вектор";
18 - индекс "Лидер";
19 - цифровой указатель приборной скорости Vпр;
20 - указатель продольного ускорения jx;
21 - индекс "Самолет";
22 - высота принятия решения (ВПР);
23 - дальность до торца ВПП;
26 - шкала тангажа;
34 - индекс "Глиссада".
На фигуре 2 показана схема обработки информации в режиме ближней навигации и посадки, где
ИИС - информационно-измерительная система;
КОИ11, КОИ12, КОИ2 - блоки комплексной обработки информации;
СНС - спутниковая навигационная система;
ИНС - инерциальная навигационная система;
РЭК КИВ НП - радиоэлектронный комплекс командно-информационного
взаимодействия, навигации и посадки;
КГС - курсоглиссадная система;
ОЛС - оптическая локационная система (корабль);
БЦВС - бортовая цифровая вычислительная система;
САУ - система автоматического управления;
МФИ - многофункциональный индикатор;
КПИ - командно-пилотажный индикатор (центральная зона МФИ).
На фигуре 3 показан вариант индикации на КПИ при виде с Земли на самолет (разворот вправо) и боковой шкалой крена с оцифровкой 29, а также положение указателя скольжения (при наличии скольжения) 24.
На фигуре 4 показан вариант индикации на КПИ при виде с самолета на Землю (разворот вправо со снижением) и боковой шкалой по крену с оцифровкой 29, а также положение указателя "Зенит" 27.
На фигуре 5 показан комбинированный вариант индикации по крену на КПИ при виде с самолета на Землю с двумя шкалами: верхней дугообразной шкалой по крену без оцифровки 28 и боковой шкалой по крену с оцифровкой 29.
На фигуре 6 показана индикация указателя ветра при выходе за ограничения боковой составляющей вектора U, а также указатели режимов работы двигателей и реверса (без включения реверса) 31.
На фигуре 7 показана индикация положения ЛА на ВПП во время пробега с индикацией работы двигателей и реверса (при включенном реверсе) 25 и наличии отрицательного продольного ускорения 20, без индикации мнемонического указателя "Высота выравнивания".
На фигуре 8 показана индикация КПИ при не выпуске шасси.
На фигуре 9 показана индикация реверса двигателей на пробеге с боковой шкалой по крену с оцифровкой и вертикальными шкалами указателей скорости 32 и высоты 33.
На фигуре 10 показан вариант индикации на КПИ при виде с Земли на самолет (разворот влево) и боковой шкалой крена с оцифровкой 29, а также индикация продольного ускорения 20 для случая jx=0.
На фигуре 11 показан комбинированный вариант индикации по крену с дугообразной шкалой по крену без оцифровки 28 и с боковой шкалой по крену с оцифровкой 29, а также шкалой угла атаки "αзад-αтек" 2.
На фигуре 12 показана индикация на взлете с использованием вертикальных индикаторов скорости 32 и высоты 33.
На фигуре 13 показан вариант индикации на КПИ при виде с самолета на Землю с верхней дугообразной шкалой по крену без оцифровки 28 и вертикальными шкалами указателей скорости 32 (36 - указатель приборной скорости) и высоты 33 (23 - индикатор дальности) при наличии положительного продольного ускорения 35.
На фигуре 14 показан вариант индикации на КПИ с применением дополнительных стрелочных индикаторов.
На фигуре 15 представлена таблица, где перечислены заявленные к изобретению маркеры и необходимое для их отображения на КПИ информационное обеспечение.
На фигуре 16 представлена схема работы РЭК КИВ НП.
Прилагаемые чертежи, которые включены и составляют часть этого описания, иллюстрируют варианты осуществления изобретения и вместе с описанием служат для объяснения цели, преимущества и принципов изобретения.
Исследованные прототипы.
1. Патент RU 2207514 С1. 10.01.2002.
2. Патент US 6057786 А, 02.05.2000.
3. Патент US 8493241 В2, 23.07.2013.
4. Патент RU 2474862 С1, 28.12.2011.
5. Патент RU 2297596 С1, 02.12.2005.
Наиболее близким по технической сущности к заявляемому изобретению по совокупности существенных признаков является патент 1.
Система индикации КПИ данного прототипа содержит:
- авиагоризонт;
- шкалу крена с индексом крена;
- подвижную шкалу тангажа;
- подвижную шкалу барометрической высоты с индикацией цифрового значения, с индексом заданной высоты и цифровым значением заданной высоты;
- величину атмосферного давления;
- подвижную шкалу приборной скорости с индикацией цифрового значения, с индексом заданной скорости и цифровым значением заданной скорости;
- отсчетный неподвижный индекс "Самолет";
- директорный индекс "Лидер";
- директорный индекс высоты.
Авиагоризонт представляет собой прямоугольник, состоящий из двух полей "Небо" и "Земля" разного цвета. Разделяющая их условная линия горизонта отражает угловое положение самолета: она поворачивается в зависимости от угла крена и в то же время перемещается по вертикали в зависимости от угла тангажа. Одновременно с поворотом и перемещением линии горизонта меняется соотношение, и положение полей "Небо" и "Земля". При нулевых значениях угла крена и тангажа линия горизонта занимает горизонтальное положение посередине прямоугольника. Над ней находится фон "Небо", под ней - фон "Земля". Шкала тангажа перемещается вверх-вниз в соответствии со значением угла тангажа самолета вместе с линией горизонта, которая является нулевой риской шкалы.
В патенте 1 в центре КПИ индицируется символ самолета (далее индекс "Самолет"), который является разрывным, состоящим из трех частей, а именно двух раздельных горизонтальных отрезков с короткими вертикальными отрезками ("крыльев") и окружности с коротким вертикальным отрезком ("килем"). Направление и величину крена предлагается определять по дугообразной шкале вверху КПИ.
Недостатками патента 1 является разрывное представление индекса "Самолет", и его индикация по крену, что затрудняет определение пространственного положения ЛА, так как для определения стороны и величины крена предлагается использовать не горизонтальный отрезок индекса "Самолет", а дугообразную шкалу крена в верхней части КПИ с изображением указателя зенита в виде треугольника. Отсчет крена делается относительно вертикали, при этом величина крена соответствует его фактической величине, а сторона не соответствует. Разрывная индикация индекса "Самолет", осложняет точное определение величины тангажа.
В отличие от патента 1 в данном изобретении предлагаемый индекс "Самолет" 21 типа "чайка" (фигура 1), отличается тем, что представляет собой цельную симметричную фронтальную фигуру стилизованного изображения профиля самолета с нижним расположением крыла (профильные отрезки силуэта), примыкающие снизу к "фюзеляжу" (окружности), с последующим выходом к "консолям крыла" (прямолинейные отрезки фигуры силуэта), спроецированными на уровень середины "фюзеляжа" (окружности). По центру к окружности примыкает вертикальный отрезок "киль". Размер окружности позволяет делать отсчет текущей величины тангажа 26, не закрывая обзор шкалы. Внутри окружности расположена центральная точка данного индекса, для более точного учета угла тангажа. Горизонтальные участки индекса "Самолет" служат для отсчета величины крена по боковой шкале на КПИ.
Индекс "Самолет" представлен для двух видов индикации пространственного положения самолета на КПИ, как с подвижным по крену (при обратной индикации) с боковым отсчетом стороны и величины крена по шкале, сопряженной с неподвижным горизонтом (фигура 3), так и с неподвижным (при прямой индикации) с боковым отсчетом стороны и величины крена по шкале, сопряженной с подвижным горизонтом (фигура 4). В последнем случае сторона вывода ЛА из крена может указываться фигурным указателем в виде четырехконечной звезды "Зенит" 27.
Боковая шкала крена с оцифровкой совместно с предлагаемым цельным индексом "Самолет" типа "чайка" (отсчет величины крена производится по законцовке "консоли крыла" вплотную к шкале) позволяет летчику единым взглядом определять крен и тангаж, в том числе и в динамике их изменения, и упрощает пилотирование, определение пространственного положения, сохранив традиционный для большинства зарубежных ЛА вид индикации по крену, так как индикация вертикали сохраняется.
Использование предлагаемого вида цельного силуэта самолета типа "чайка" по сравнению с другими, состоящими из нескольких частей, показали лучшие результаты по выводу самолета из сложного положения, меньшей психофизиологической напряженности в обычных режимах и более точную технику пилотирования [2, 6].
В патенте 1 заданная траектория, заданный крен и заданная скорость индицируются при помощи единого индекса "Лидер". Этот индекс представляет собой симметричную фигуру, подобную по форме предлагаемому здесь индексу "Самолет". Он состоит из четырех элементов, изображающих различные части самолета при виде сзади: первая часть "фюзеляж" имеет форму окружности, вторая часть "крылья" состоит из двух горизонтальных отрезков прямой, примыкающих слева и справа к первой части, третья часть "киль" состоит из вертикального отрезка прямой, расположенного над центром первой части и касающегося одной своей стороной первой части, четвертая часть (шасси) имеет П-образную форму, которая расположена под первой частью симметрично относительно центра первой части.
Основные элементы индикации сгруппированы возле двух условных линий: горизонтальной и вертикальной.
Горизонтальная линия проходит через середины указателей скорости и высоты. В установившемся горизонтальном полете по заданной траектории с этой линией должны совмещаться все основные подвижные элементы: линия горизонта, директорный индекс "Лидер", директорный индекс высоты, индекс заданной скорости, индекс заданной высоты, стрелка вертикальной скорости.
Вертикальная линия проходит через центры двух символов, изображающих сам летательный аппарат: отсчетный индекс авиагоризонта и расположенный в центре шкалы курса индекса "Самолет". В установившемся идеальном режиме полета с этой линией совмещаются все основные подвижные элементы: индекс крена, шкала тангажа, директорный индекс "Лидер", индекс путевого угла (треугольник на внешней стороне шкалы курса), стрелка заданного направления (крестообразная стрелка), стрелка азимута/курсового угла от системы радионавигации или от радиокомпаса (контурная стрелка). Величина отклонения указанных подвижных элементов от этих двух линий служит мерой отклонения соответствующего параметра полета от установившегося идеального режима.
Индекс "Лидер" в патенте 1 имеет следующие особенности:
- перемещается относительно центра индекса "Самолет" влево-вправо и вверх-вниз;
- поворачивается вокруг своего центра;
- изменяется в геометрических размерах.
По горизонтали индекс "Лидер" перемещается в соответствии с величиной отклонения от заданной траектории в горизонтальной плоскости в соответствии с директорной командой по курсу. По вертикали указатель перемещается в соответствии с величиной отклонения от заданной траектории в вертикальной плоскости или директорной командой по тангажу. При нулевых значениях отклонений центр индекса "Лидер" попадает в центр индекса "Самолет". Индекс "Лидер" поворачивается вокруг своего центра в соответствии с директорной командой по крену.
Геометрические размеры индекса "Лидер" изменяются в зависимости от отклонения от заданной скорости. Когда скорость меньше заданной, индекс "Лидер" уменьшается в размерах - "удаляется". Когда скорость больше заданной, индекс "Лидер" увеличивается в размерах - "приближается". Если скорость равна заданной, индекс "Лидер" имеет номинальный размер. При этом он совмещается с индексом "Самолет".
Таким образом, в изученном патенте 1 индекс "Лидер" перемещается в горизонтальной и вертикальной плоскости информационного поля КПИ, управляется по крену и изменяет свои размеры в зависимости от скорости. Восприятие летчиком по индексу "Лидер" одновременно четырех директорных команд затруднено, так как требует постоянного переключения внимания для анализа соответствующих управляющих сигналов, что является недостатком.
В отличие от патента 1 предлагается ввести следующие изменения:
1. Индекс "Лидер" 18, представляющий собой симметричную фигуру фронтального профиля самолета, состоящую из окружности "фюзеляж", примыкающих к ней двух горизонтальных отрезков "крылья" и вертикального отрезка "киль", что кардинально отличает индексы "Лидер" и "Самолет" по очертаниям. Кроме того, эти индексы отличаются по цветовой раскраске. Благодаря этим факторам индексы "Лидер" и "Самолет" невозможно перепутать. Индекс "Лидер" перемещается относительно центра симметрии индекса "Самолет" вверх-вниз, а также поворачивается вокруг своего центра. В сочетании с индексом "Самолет" позволяет быстро и наглядно обеспечить принятие требуемого положения ЛА и исправление погрешностей его выдерживания.
2. Индекс "Лидер" предназначен для индикации требуемого положения ЛА по тангажу ϑ и крену γ для полета по заданной траектории. По вертикали индекс "Лидер" перемещается в зависимости от заданного режима полета в вертикальной плоскости в соответствии с любой из пар директорных команд индекс "Лидер" предназначен для индикации требуемого положения ЛА по тангажу ϑ и крену γ для полета по заданной траектории. По вертикали индекс "Лидер" перемещается в зависимости от заданного режима полета в вертикальной плоскости в соответствии с любой из пар директорных команд, формируемых по отклонениям: по тангажу δϑ и углу наклона траектории ΔΘ или по заданной высоте ΔНзад и вертикальному отклонению от глиссады планирования εг;
3. Во фронтальной плоскости "Лидер" поворачивается вокруг своего центра симметрии в соответствии с директорной командой по крену - δγ (рассчитывается по величине отклонения от заданного курса δψ или боковому отклонению от заданной траектории ΔZ). Величины рассогласования вычисляются в БЦВС и передаются в генератор символов для формирования индекса "Лидер" на КПИ.
Предлагаемая индикация индекса "Лидер" управляется директорными командами по крену и тангажу без изменения его положения по линии горизонта и размерам в зависимости от скорости. Такая индикация воспринимается и реализуется более просто, управление осуществляется без ошибок и своевременно.
Маркеры: индекс ВПП, мнемонический указатель "Высота выравнивания" с цифровым индикатором, индекс "Самолет-вектор", шкала угла атаки "αзад-αтек", указатель ветра в патенте 1 не используются.
В патенте 2 поставлен вопрос об отрицательных особенностях для пилотов автоматизации управления на всех этапах полета современного ЛА. Здесь в частности указывается, что автоматизация может снизить нагрузку на пилота, но следствием этого является тенденция к увеличению чувства изоляции летчика от управления самолетом, в той степени, что пилот не имеет полного и непрерывного представления о функционировании в текущий момент времени автоматизированной системы самолета, существует тенденция для пилотов инициировать выход на нежелательные управления, которые противоречат сигналам по управлению от автоматизированных систем, тем самым ставя под угрозу безопасность, что, безусловно, является недостатком.
Для устранения этого недостатка в патенте 2 предлагается обеспечить летчика полетной информацией, которая позволяет увеличить его осведомленность по элементам полета при управлении. Используются известные индексы "Самолет" и "Лидер", небольшие по своим размерам по отношению к информационному полю КПИ и похожие по изображению (окружность с примыкающими к ней горизонтальными отрезками), марки продольного ускорения (шеврон ">") и приборной скорости (кронштейн "]"). Индикация, предложенная в патенте 2 не решает поставленной задачи, так как системных предложений по решению вопросов перехода от режима директорного управления ЛА к автоматическому и, особенно, обратному переходу в патенте 2 нет, что является недостатком.
Маркеры: индекс ВПП, мнемонический указатель "Высота выравнивания" с цифровым индикатором, индекс "Самолет-вектор", шкала угла атаки "αзад-αтек", указатель ветра, в патенте 2 не используются.
В отличие от патенте 2, для поэлементного контроля за параметрами полета ЛА в режиме автоматического управления в данном изобретении в состав системы информационной индикации включен ряд новых взаимодополняющих и эргономически связанных маркеров: индекс ВПП 4 (иная интерпретация), мнемонический указатель "Высота выравнивания" с цифровым индикатором 11, 12, индекс "Самолет-вектор" 17, шкала угла атаки "αзад-αтек" 3, 2, указатель ветра 5, использование которых позволяет повысить точность пилотирования и безопасность взлетно-посадочных режимов, снизить психофизиологическую нагрузку на летчика, расширить его возможности по принятию целесообразного и своевременного решения на посадку или уходу на запасной аэродром.
Сценарий функционирования этих маркеров в сочетании с типовыми маркерами, индицируемыми на МФИ, максимально приближен к визуальному восприятию захода и посадки при ручном пилотировании. Причем, летчик в полете по приборам видит поэлементно результаты своего управления по направлению, по месту относительно ВПП, по процессу создания заданного посадочного угла атаки, информации о высоте, оставшейся до приземления. У летчика в процессе пилотирования вырабатывается стереотип управления по конкретным элементам в случае отказа САУ при автоматической посадке или частичном отказе индикации отдельных символов. Например, при отказе директорных команд индекса "Лидер" по крену (у индекса "Лидер" прекращается индикация горизонтальных отрезков), директорная команда по тангажу продолжает индицироваться. У предложенной системы индикации предусмотрено дублирование информации, предназначенной для индикации, необходимых директорных сигналов по данному маркеру в дополнение основного - индекса "Лидер" и интеллектуальной помощи пилоту в распределении внимания по считыванию информации и управлению ЛА. Летчик, находясь в контуре управления, подготовлен по предложенной индикации, учитывать конкретный отказ или отклонение от заданного режима. Оценив причину отказа, летчик принимает решение о продолжении маневра, ухода на второй круг или запасной аэродром.
В патенте 3 индексы "Лидер" и "Самолет", короткие по своим размерам по отношению к информационному полю КПИ и похожие по изображению, марки требуемого и текущего курса, линия искусственного горизонта, индекс ВПП располагаются в одной и той же области экрана и в процессе полета могут накладываться друг на друга. На КПИ также отображается топографический рельеф местности от синтетической зрительной системы SVS (патент US 7352292 В2) и фактические ориентиры местности от расширенной зрительной системы EVS (патенты US 7655908 В2 и US 5317394 А), что еще больше усложняет анализ представленной информации.
Недостатком такого подхода является тот факт, что при наложении нескольких индикационных картинок друг на друга усложняется комплексное восприятие пилотом информации на экране, что может привести к ошибочным решениям и действиям, в том числе, при контроле пространственного положения ЛА относительно ВПП [2]. Кроме того, в данном случае сложно определить, по кому из индексов "Лидер" или "Самолет" следует выполнять управление, т.к. они подобны по форме (незначительно отличаются только масштабом). Система не предполагает летное обучение пилотированию без использования натурных посадочных систем и изображений объекта.
Маркеры: мнемонический указатель "Высота выравнивания" с цифровым индикатором, индекс "Самолет-вектор", шкала угла атаки "αзад-αтек", указатель ветра, в патенте 3 не используются.
В отличие от патента 3 в предлагаемой системе индикации индекс "Лидер" не изменяет свои линейные размеры и свое место относительно центра индекса "Самолет". Индексы "Лидер" и "Самолет" невозможно перепутать благодаря существенному их различию по форме и цветовой кодировке. При этом других маркеров, препятствующих восприятию рассматриваемых, в зоне индикации нет, за исключением кратковременного периода приближения индекса "Самолет-вектор" к индексу ВПП на удалении 3-4 километра, что не ухудшает восприятие основных индексов, т.к. этот индекс по своему изображению, приоритету наложения, цветовой кодировке и размерам существенно отличается от индексов "Лидер" и "Самолет". Другие маркеры, представляемые на предмет изобретения, из центральной зоны КПИ вынесены и не затрудняют контроль пространственного положения ЛА и точного выполнения директорных команд по управлению.
В отличие от патента 3 индекс ВПП выполнен схематично в виде обобщенной модели ВПП, а не воспроизводит натурный объект, что позволяет летчику (оператору) сконцентрировать внимание на процессе посадки (взлета), не отвлекаясь на детали, освободить зрительное поле КПИ от загромождающей информации, более четко выдержать этапы посадки и взлета исключая критические ошибки, обеспечивает более систематический подход к организации безопасности движения ЛА на этапах взлета и посадки, а также изменяет масштаб в зависимости от дальности.
При этом предлагаемая система индикации не исключает возможность использования систем типа SVS и EVS, например, их можно включать опционально для привязки к местности с помощью кнопки без удержания, далее заход и посадку продолжать по предлагаемой системе индикации во избежание ошибок.
В данном изобретении в отличие от патента 3 система индикации посадки на объект, обеспечивает летное обучение пилотированию без использования натурных посадочных систем и изображений объекта при заданных параметрах ветра относительно объекта благодаря использованию таких маркеров, как индекс ВПП (иная интерпретация), индекс "Самолет-вектор", мнемонический указатель "Высота выравнивания" с цифровым индикатором, указатель ветра.
В патенте 4 технической задачей изобретения являлось повышение безопасности за счет создания на индикационном поле экрана КПИ одновременной единой образной комплексности текущей информации для летчика "крен-тангаж-высота-скольжение", которая в достоверной и понятной форме показывала бы летчику в едином моменте времени:
- угловое положение управляемого им ЛА в пространстве (крен, тангаж, высота, угол скольжения) с аэродинамическими и инерционно-массовыми характеристиками реального ЛА;
- отклонения от параметров заданной траектории полета ЛА в пространстве (высота, боковое отклонение);
- образное представление расчетных параметров, корректирующих отклонения от заданной траектории (крен, тангаж, угол скольжения, скорость);
- образное представление радиовысоты в масштабе неподвижной неравномерной шкалы значения высоты полета ЛА.
Для обеспечения данной технической задачи на экране КПИ индицируется неподвижный относительно центра индикационного поля экрана отсчетный индекс в виде стилизованного изображения самолета с выпущенными шасси ("Самолет"), обозначающий текущее положение ЛА в пространстве и подвижный индекс в виде стилизованного изображения самолета при виде сзади с выпущенными шасси, обозначающий требуемое положение ЛА в пространстве ("Лидер"), имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и горизонтали относительно индекса "Самолет". Оба индекса "Самолет" и "Лидер" выполнены с возможностью одновременного отображения текущего угла скольжения и угла тангажа индекса "Самолет" и отклонения от заданного угла скольжения и угла тангажа индекса "Лидер" путем индикации треугольника, основание которого равно горизонтальной прямой линии символизирующей крылья ЛА, положение вершины треугольника соответствует текущему значению угла тангажа и угла скольжения индекса "Самолет" и отклонению от заданного значения угла тангажа и угла скольжения индекса "Лидер", а размеры треугольника увеличиваются или уменьшаются соответственно заданной скорости полета таким образом, что при нулевых значениях ошибок по всем контролируемым параметрам индекс "Лидер" совмещается с индексом "Самолет".
Недостатком такой системы индикации параметров полета является сложность определения по образу треугольников "Самолет" и "Лидер" конкретной величины и направления рассогласования по каждому из индицируемых параметров: крену, тангажу, углу скольжения, и особенно, скорости, так как сравнить и соизмерить изменяющиеся в своих параметрах треугольники достаточно просто лишь при наложении их друг на друга, что и является конечной локальной задачей летчика.
Маркеры: индекс ВПП, мнемонический указатель "Высота выравнивания" с цифровым индикатором, индекс "Самолет-вектор", шкала угла атаки "αзад-αтек", указатель ветра, в патенте 4 не используются.
В отличие от патента 4, предложенная в данном изобретении система, включающая индексы "Самолет" и "Лидер" с различными видами индикации по крену, указателями приборной скорости, продольного ускорения, заданного и текущего путевого угла, режима работы двигателей и реверса, индексом "Глиссада", координатным указателем аэродрома посадки совместно с системой вводимых маркеров: индексом ВПП (иная интерпретация), мнемоническим указателем "Высота выравнивания" с цифровым индикатором, индексом "Самолет-вектор", шкалой угла атаки "αзад-αтек", указателем ветра, обеспечивают возможности:
- безошибочного считывания конкретных параметров режимов захода, посадки, пробега и взлета, как в директорном (при ручном пилотировании), так и автоматическом режиме;
- исключения нежелательных управляющих действий при переходе на ручное управление в случае отказа или сбоя системы автоматического захода и посадки, т.к. обеспечена работа летчика в режиме контроля за управлением ЛА и его решения о возможности продолжения захода;
- точного пилотирования при реализации директорных команд благодаря информационной наглядности предложенной к изобретению системы маркеров, частичного дублирования их информационного содержания, оказывающего помощь летчику (оператору) в распределении внимания;
- простоту представления пространственного положения ЛА в приборном полете при отсутствии видимости.
В патенте 5 представлен способ формирования пилотажно-навигационной информации на многофункциональном индикаторе для выполнения посадки по приборам, включающий точное измерение и выдачу потребителям необходимых параметров движения самолета и его положения в пространстве относительно земли и ВПП, находящуюся на расстоянии 2-3 км впереди ЛА. На пилотажном индикаторе летчика отображается формат, на котором изображена ВПП с продолженной осевой линией, неподвижная центральная точка, относительно которой происходит передвижение внешних объектов, измерение значений высоты ЛА по радиовысотомеру, барометрической высоты, линии горизонта, изображение ЛА, символа вектора скорости. Ось визирования экрана направляют по вектору скорости так, что он является центральной частью экрана. В центр экрана также проецируется символ в виде неподвижного силуэта самолета. Формируют также прицельную метку, перемещаемую по заданной траектории с той же скоростью, что и ЛА, находящуюся на заданном расстоянии впереди него в заданном коридоре движения и проецируют ее на экран в виде рамки. Летчик посредством отклонения рычагов корректирует угол наклона условного вектора скорости, значение которого определяют в вычислителе после фильтрации и суммирования сигналов угла тангажа и угла наклона истинного вектора скорости самолета, контролирует и выдерживает центр прицельной метки в центре экрана, при этом фактический вектор скорости направляется в упрежденную точку, движущуюся по траектории посадки, обеспечивая плавный выход самолета на заданную траекторию и последующее движение по расчетной траектории, выполняя посадку по приборам с достаточной степенью точности. Для обеспечения полета по приборам при заходе на посадку на высоте менее 30 м формируют прицельную метку посадки и проектируют на экран в виде буквы "Т", лежащей в начале зоны точного приземления на ВПП, которая при пересечении самолетом торца ВПП начинает движение по оси ВПП со скоростью, меньшей скорости самолета, при этом дополнительно на изображении ЛА появляются стрелки радиовертикальной скорости, столбик радиовысоты, заканчивающийся символом "тень самолета", уменьшается по мере убывания радиовысоты ЛА, а символ "тень самолета" увеличивается в размерах при уменьшении радиовысоты. Летчик выдерживает точку вектора скорости на прицельной метке до момента посадки.
Недостатки патента 5:
1. Директорное (ручное) управление ЛА при посадке по направлению с выдерживанием прицельной метки в виде рамки в центре экрана на неподвижной точке в течение захода до высоты 30 м требует постоянного контроля за взаимоположением данных маркеров, а также за положением отображения ВПП, воздушного коридора, земли и линии горизонта, проецируемыми на экран, ось визирования которого направляют по вектору скорости так, что он является центральной частью экрана. Кроме этого, дополнительно с высоты 30 м индицируется посадочная информация, включающая шкалу радиовысоты, радиовертикальную скорость, рассогласование между продольной осью самолета и вектором скорости, «тень самолета»,. Основная часть указанных маркеров сосредоточена в центре экрана, что делает эту область перенасыщенной пилотажно-навигационной информацией. Кроме того, так как фактически управление ЛА происходит в условиях изменения пространственного положения ЛА, требуется постоянный контроль за его креном по символу ЛА (или по линии горизонта), хотя визуально на МФИ представлено только направление крена, а не его величина.
2. Смена на высоте менее 30 м изображения прицельной метки посадки в виде рамки на другую, в виде буквы "Т", на оставшийся период времени (до посадки около 15 с) недопустима, т.к. приведет к нарушению непрерывности управления и возможным ошибкам из-за ограничений по времени перехода в силу физиологических возможностей человека.
3. По индицируемому значению радиовертикальной скорости можно определить только ее текущее количественное значение, а не требуемую величину и направление ее изменения. Изменить вертикальную скорость можно изменением угла атаки по результату анализа известных значений заданного/расчетного посадочного и текущего угла атаки (рассчитывается по известным соотношениям). Однако, в представленном индикационном формате, показан только текущий угол атаки, что информативно может указывать лишь на выход за ограничения по углу атаки для конкретного типа ЛА без учета расчетного посадочного угла атаки.
4. Индекс ВПП, по мере приближения ЛА к ВПП, увеличивается в размерах, причем, его положение жестко привязано к расчетной точке посадки, которая неизменно находится центре экрана МФИ. В данном случае летчику сложно определить взаимоположение ВПП и ЛА в динамике их сближения.
5. Предлагаемый способ посадки не предназначен для применения на пробеге и взлете.
Эти недостатки затрудняют контроль над пространственным положением и снижает качество директорного управления ЛА при посадке. В частности, это может привести к существенным погрешностям пилотирования, особенно, при значительных отклонениях текущих параметров управления (крена, угла атаки, высоты выравнивания, высоты выравнивания и вертикальной скорости) от заданных, например, при сильном боковом ветре в отсутствии видимости.
Маркеры: мнемонический указатель "Высота выравнивания", индекс "Самолет-вектор", шкала угла атаки "αзад-αтек", указатель ветра, в патенте 5 не используются.
В отличие от патента 5 данное изобретение позволяет обеспечить летчика индикационной информацией достаточной для обеспечения выполнения взлета, захода, посадки и пробега ЛА (БЛА) в директорном и автоматическом режиме, в том числе при отсутствии видимости; предлагает новые маркеры: индекс ВПП в иной интерпретации, мнемонический указатель "Высота выравнивания" с цифровым индикатором, индекс "Самолет-вектор", шкала угла атаки "αзад-αтек", указатель ветра, использование которых позволяет повысить точность и безопасность взлетно-посадочных режимов, снизить психофизиологическую нагрузку на летчика, расширить его возможности по принятию целесообразного и своевременного решения при частичных отказах пилотажно-навигационного оборудования; обеспечивает коррекцию текущего угла атаки αтек по значению заданного угла атаки αзад на этапах посадки, выравнивания и взлете; допускает раздельное применение элементов системы, в качестве дополняющих существующие, а также при построении новых систем индикации; обеспечивает высокое качество пилотирования благодаря простоте представления пространственного положения ЛА в приборном полете, информационной наглядности предложенных к изобретению маркеров, частичного дублирования и дополнения ими информационного содержания индикационного поля, оказывающих помощь летчику (оператору) в распределении внимания.
Сущность изобретения
Задача, на решение которой направлено изобретение, заключается в повышении надежности и безопасности взлета, захода на посадку, посадки и пробега ЛА (БЛА) в директорном и автоматическом режиме, в том числе при отсутствии видимости за счет создания более полной и гибкой системы индикации на КПИ взаимодополняющих и эргономически связанных маркеров.
Процесс формирования пилотажно-навигационной информации на КПИ для выполнения взлета и посадки включает измерения, комплексную обработку информации, выдачу потребителям параметров движения самолета, а также отображение требуемого индикационного формата на КПИ.
Информационная система, предлагаемая для использования в данном изобретении, обеспечивается с помощью структуры представленной на схеме обработки информации в режиме ближней навигации (фигура 2). В нее входят: информационно-измерительная система ИИС, включающая в себя различные источники информации (РЭК КИВ НП - радиоэлектронный комплекс командно-информационного взаимодействия навигации и посадки, ИНС - инерциальная навигационная система, КГС - курсоглиссадная система, СНС - спутниковая навигационная система, ОЛС - оптическая локационная система); БЦВС - бортовая цифровая вычислительная система; СЕИ - система единой индикации; САУ - система автоматического управления. В контур управления также входит летчик (оператор), ДУ - двигательная установка, органы и приводы управления ЛА. Часть подсистем ИИС обладает достаточно высокими точностными характеристиками, мобильностью, быстротой развертывания на новом месте дислокации и компактностью. Все это позволяет использовать ее для обслуживания как оборудованных, так и необорудованных посадочных площадок (ВПП, палуба корабля, шоссе и др.) Процесс обработки информации изложен в [8, 13].
Актуальность развития локальных дифференциальных радионавигационных систем посадки на основе РЭК КИВ НП обусловлена следующими основными факторами [8]:
- существующие курсоглиссадные системы требуют для своего развертывания значительного пространства и времени, что существенно снижает возможности по их установке на подвижные посадочные площадки (корабль);
- высокая стоимость и продолжительное время выставки системы вызывает трудности с развертыванием КГС на необорудованных посадочных площадках;
- использование спутниковых навигационных систем ГЛОНАСС/GPS не всегда эффективно, ввиду их слабой помехозащищенности [9-12].
В этой связи, для обеспечения высокой доступности, надежности и точности определения навигационных параметров ЛА на одном из самых сложных этапов полета - заходе и выполнении посадки, в [8, 13] предлагается дополнить традиционное радиотехническое и индикационное оборудование новыми средствами, которые обеспечат выполнение посадки как в директорном, так и в автоматическом режиме, даже в условиях нулевой видимости.
Современные радиотехнические системы посадки представляют собой комплекс наземного (корабельного) и бортового оборудования, и могут использоваться для определения абсолютных координат летательного аппарата и координат ЛА относительно ВПП или посадочной площадки, в случае использования передвижных наземных средств РЭК КИВ НП. В интересах повышения надежности и точности определения координат ЛА в [8, 13] предлагается использовать комплексированные измерительные системы, построенные на разных физических принципах. Под радиоэлектронным комплексом (РЭК) посадки будем понимать все составляющие ИИС (фигура 2), позволяющие измерять линейные и угловые координаты ЛА, а также другие навигационные параметры. Сигналы в блоках КОИ11 и КОИ10 подвергаются оптимальной фильтрации. В алгоритме КОИ2 расчет посадочного сигнала производится в горизонтальной и вертикальной плоскостях независимо. Уровень помех в посадочном сигнале, формируемом с помощью КОИ2, существенно меньше по сравнению с исходным уровнем помех ИИС, более того, комплексирование обеспечивает САУ посадочной информацией даже после пропадания любого из них. При этом в горизонтальной плоскости вычисленный посадочный сигнал дает информацию об отклонении от оси ВПП, а в вертикальной, от заданной глиссады полета над ВПП. Кроме того, расширяется зона линейных характеристик посадочных сигналов.
Данная схема комплексирования информации обеспечивает получение посадочного сигнала с существенным снижением уровня высокочастотных помех и искажений в области негарантированных характеристик сигналов курсоглиссадных маяков, как для интегрированного, так и для автономного режимов применения систем. Приведенная двухуровневая схема обработки посадочной информации раскрывает преимущества предлагаемой директорной и автоматической посадки (ДАП) и позволяет повысить качество управления существующих систем посадки и использовать результаты комплексной обработки информации ИНС в системах автоматизированного управления посадкой.
Выходные сигналы КОИ2 используются для реализации управления ДАП. Информация обо всех, используемых при индикации параметрах, передается в СЕИ. Индицируемые указатели, шкалы, индексы и параметры представлены на фигурах 1, 3-14.
Информационное обеспечение системы индикации
В таблице на фигуре 15 перечислены заявленные к изобретению маркеры и необходимое для их отображения на КПИ информационное обеспечение. Схема работы РЭК КИВ НП показана на фигуре 16.
РЭК КИВ НП осуществляет измерение относительных декартовых координат ЛА - d1=[dx, dy, dz]T и вектора путевой скорости ЛА - Wнорм=[wx, wy, wz]T в нормальной системе координат. Совместно с другими информационными системами (СНС, КГС, ИНС, ОЛС) РЭК КИВ НП обеспечивает систему индикации КПИ первичными данными через функциональное программное обеспечение ЛА на основе алгоритмов оптимальной фильтрации - блока комплексной информации (КОИ).
В режиме посадки управляющий алгоритм системы индикации маркеров выполняет расчеты следующих величин:
- курса ВПП  ;
;
- длины ВПП  ;
;
- относительных координат ЛА Xотн=d1+RA;
- горизонтальной дальности до ВПП  ;
;
- высоты выравнивания Нвыр=dy, при dy≤15 м;
- положения на глиссаде 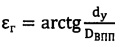 .
.
Здесь λТ2, λТ1 и ϕТ2, ϕT1 - долгота и широта первого и второго торцов ВПП (известны из паспорта аэродрома или измеряются); R - радиус кривизны геоида по выбранной модели Земли (эллипсоид Крассовского); RA=[rx, ry, rz]T - вектор выноса фазового центра базовой антенны РЭК КИВ НП относительно центра ВПП (известный вектор, определяемый в ходе идентификации РЭК КИВ НП в ходе программной юстировки);
εг - угол наклона глиссады для ВПП (определяется паспортом аэродрома или устанавливается, исходя из необходимости обеспечения безопасности захода на выбранную площадку).
Возможно использование других современных и перспективных высокоточных наземных систем посадки и методов расчета параметров посадочной глиссады (RU 2520872 С2, RU 2496131 С1, патент 5).
Пилотажная и навигационная информация отображается на электронном дисплее МФИ, который устанавливается на ЛА. Для беспилотных летательных аппаратов информационный индикатор ДАП устанавливается на наземные стационарные или передвижные пункты управления для контроля над автоматической посадкой и обеспечения директорной посадки при отказах автоматических систем.
Для отображения пилотажной и навигационной информации используется КПИ, где отображается информация, характерная для обычного авиагоризонта, а также предлагаются новые индексы, символы, шкалы, указатели, с информационной и цветовой кодировкой, взаимосвязью и дублированием, представленной на фигурах 1, 3-14, которые в тексте совокупно называются маркерами.
Предметом изобретения является система индикации, включающая набор индикационных маркеров на КПИ, в которой наряду с используемыми в настоящее время предлагаются новые индикационные маркеры, а также порядок их работы и сценарий взаимодействия. В качестве патентуемых предъявляются новые маркеры: 17 - индекс "Самолет-вектор"; 3, 2 - шкала угла атаки "αзад-αтек"; 4 - индекс ВПП (иная интерпретация); 5 - указатель ветра U; 11 - мнемонический указатель "Высота выравнивания" с цифровым указателем высоты выравнивания 12 (цифровой указатель дублируется - 16).
Изобретение осуществляется путем обеспечения взаимодействия следующих маркеров системы индикации посадки ЛА.
Индекс "Самолет" 21. Представляет собой симметричную фронтальную фигуру стилизованного изображения профиля самолета с нижним расположением "крыла" (профильные отрезки силуэта), примыкающие снизу к "фюзеляжу" (окружности), с последующим выходом к "консолям крыла" (прямолинейные отрезки фигуры силуэта), спроецированными на уровень середины "фюзеляжа" (окружности). По центру к окружности примыкает вертикальный отрезок - "киль". Размер окружности позволяет делать отсчет текущей величины тангажа, не закрывая обзор шкалы. Внутри окружности расположена центральная точка данного индекса, для более точного учета угла тангажа. Горизонтальные участки индекса "Самолет" служат для отсчета величины крена по боковой шкале на КПИ 29. Индекс "Самолет" в данном виде может быть представлен на КПИ с использованием различного представления шкалы крена, в частности: с отсчетом крена по боковой шкале при виде с Земли на самолет (обратная индикация, фигура 3), с отсчетом величины крена по верхней шкале без оцифровки при виде с самолета на Землю (прямая индикация, фигура 13), с совместной индикацией шкал отсчета крена, боковой и верхней, (прямая индикация, фигура 5) и др.
Вид предлагаемого цельного силуэта самолета типа "чайка" [6] по сравнению с другими, состоящими из нескольких частей, показали лучшие результаты по выводу самолета из сложного положения, меньшей психофизиологической напряженности летчика на всех режимах полета и более точную технику пилотирования.
Индекс "Лидер" 18. Представляет собой симметричную фигуру фронтального профиля самолета желтого цвета, состоящую из круга (фюзеляж), примыкающих к ней двух горизонтальных отрезков (крылья) и вертикального отрезка (киль). Индекс "Лидер" перемещается относительно центра симметрии индекса "Самолет" вверх-вниз, а также поворачивается вокруг своего центра. В сочетании с индексом "Самолет" позволяет точно выполнять директорные команды по углам крена и тангажа для занятия требуемого положения ЛА и исправления погрешностей его выдерживания.
Индекс "Лидер" предназначен для индикации требуемого положения ЛА по тангажу ϑ (шкала тангажа 26) и крену γ (шкала 29) при полете по заданной траектории.
По вертикали индекс "Лидер" перемещается в зависимости от заданного режима полета в вертикальной плоскости в соответствии с одной из пар директорных команд, формируемых на основе отклонений: по тангажу δϑ и углу наклона траектории ΔΘ или по другой паре сигналов отклонений - по заданной высоте ΔН и по глиссаде планирования. Расчет изменения угла тангажа производится с учетом динамики изменения вертикальной составляющей скорости ЛА (скорости снижения 14).
Во фронтальной плоскости "Лидер" поворачивается вокруг своего центра симметрии в соответствии с директорной командой по крену - δγ, величина которой рассчитывается по величине отклонения от заданного курса δψ или бокового отклонения от заданной траектории ΔZ. Величины рассогласования вычисляются в БЦВС и передаются в генератор символов для формирования индекса "Лидер" на КПИ.
Предлагаемая индикация индекса "Лидер" управляется директорными командами по крену и тангажу без изменения его положения по линии горизонта и размерам в зависимости от скорости. Такая индикация воспринимается и реализуется более просто, управление осуществляется без ошибок и своевременно.
Индекс "Лидер" работает на следующих режимах полета: выдерживания заданного маршрута, захода, посадки, пробега и взлета. В режиме "Посадка" одновременно с индексом "Лидер" на КПИ, в частности, индицируются: индекс ВПП, шкала "αзад-αтек" (при Нг≤30 м), мнемонический указатель "Высота выравнивания" (при Нг≤15 м), индекс "Самолет-вектор". В комбинации они обеспечивают безошибочное управление ЛА с контролем величин отклонений от заданных значений по "Лидеру".
На высоте 30 м индекс "Лидер" находится в режиме "Посадка" по интегральной команде расчета параметров выравнивания до момента касания ВПП.
При наличии ветра индекс "Лидер" управляется директорным сигналом по крену δγ с учетом изменения курса полета на изменившийся угол сноса, который индицируется на указателе заданного и текущего путевого угла (13, 15). При таком управлении не возникают заметные отклонения от посадочной траектории и для компенсации изменения угла сноса требуются небольшие изменения курса полета ЛА. При этом упрощается управление и повышается точность пилотирования. Индекс "Лидер" продолжает индицировать директорные команды по крену при изменении угла сноса и другим причинам в процессе посадки и далее, при Нг<15 м. Допустимый крен ограничивается некоторой конкретной величиной, зависящей от тактико-технических характеристик ЛА, из-за близости земной поверхности (ВПП).
Индекс ВПП (иная интерпретация) 4. Индекс выполнен в виде трапеции, визуально соответствующей образу реальной ВПП при заходе на посадку. Индицируется в верхней части КПИ при включении режима "Посадка" и занимает положение, соответствующее фактическому положению ВПП относительно ЛА и выбранного направления посадки, слева или справа. При приближении ЛА к торцу ВПП с заданным курсом посадки индекс перемещается к линии продольной симметрии КПИ, индицируя расчетное место ВПП относительно ЛА (по центру, фигура 1).
После входа в глиссаду снижения индекс ВПП перемещается вниз в первое, фиксированное по месту положение на КПИ, и не меняет свое положение до удаления 15 км. На дальности 15 км индекс увеличивается в размере в 1,5 раза и занимает второе фиксированное положение. На удалении 8 км по глиссаде индекс ВПП перемещается в третье фиксированное положение, увеличивается в 1,5 раза и не меняет свое положение по вертикали прибора до касания ЛА ВПП. Это положение индекса ВПП на КПИ соответствует фактическому положению на рельефе местности. Дальность ЛА до торца ВПП индицируется в условном масштабе на КПИ индексом "Самолет-вектор" и цифровым указателем дальности.
Индекс ВПП и индекс "Самолет-вектор", который перемещается по информационному полю в зависимости от положения ЛА относительно ВПП, совместно информируют летчика (оператора) о взаимном положении ЛА и ВПП в пространстве. Если самолет отворачивает вправо, индекс ВПП уклоняется влево. Если самолет отворачивает влево, индекс ВПП уклоняется вправо. Это облегчает контроль режима посадки по контролируемым параметрам и упрощает заход, выполняя директорные команды индекса "Лидер" и других индексов предложенной системы индикации.
Индекс ВПП совместно с индексом "Самолет-вектор", наглядно индицируют выход ЛА на ВПП по направлению и глиссаде. Кроме этого, на высоте Нг≤15 м, справа от индекса ВПП индицируется мнемонический указатель "Высота выравнивания" и, слева на КПИ (при Нг≤30 м), шкала угла атаки "αзад-αтек", предназначенные для индикации заданного и текущего угла атаки в процессе выравнивания до касания ВПП.
После касания ВПП ЛА, с начала пробега, шкала "αзад-αтек" и мнемонический указатель "Высота выравнивания" перестают индицироваться, а индекс ВПП для удобства выдерживания направления пробега увеличивается в размерах в 1,2 раза (фигура 7). При пробеге летчик управляет ЛА, контролируя отклонения индекса "Самолет-вектор" по направлению уклонения вектора, а по основанию индекса (окружности) - место на ВПП.
На пробеге расчет расстояния удаления от расчетной точки посадки до текущего положения ЛА на ВПП задается индексом "Самолет-вектор" и индицируется также на цифровом указателе дальности 23. Рабочая длина ВПП внесена в запоминающее устройство перед полетом или рассчитывается по координатам двух точек симметрии ВПП с разных направлений. Если оставшаяся длина ВПП не позволяет на текущей скорости остановить ЛА в пределах ВПП, то указатель скорости увеличивается в два раза, кодируется красным цветом, указатель дальности начинает мигать с частотой 3 Гц и рядом с индексом ВПП на КПИ появляется надпись: "Тормози".
Кроме режима посадки индекс ВПП используется для наглядности выполнения режима "Взлет" при ограниченной видимости или вне видимости ориентиров (фигура 12). При этом одновременно используются:
- индекс "Самолет-вектор" - для выдерживания направления (аналогично пробегу);
- шкала угла атаки "αзад-αтек" - для начала создания и контроля взлетного угла ЛА (атаки) на скорости подъема носовой опоры шасси;
- индекс "Лидер" - для индикации количественного отклонения руля высоты или стабилизатора;
- указатель приборной скорости и указатель дальности - для контроля текущей скорости разбега, скорости подъема передней опоры и длины разбега;
- индикации скорости V1 - принятия решения о прекращении или продолжении взлета при отказе двигателя.
Таким образом, индекс ВПП появляется в верхней части КПИ при включении режима "Посадка", рассчитывается по известным координатам торцов ВПП и дальности до ВПП, меняет свои размеры в зависимости от удаления ЛА от ВПП, имитируя динамику приближения, применяется как на взлете, так и на посадке.
Индекс "Самолет-вектор" 17. Индекс представлен в виде отрезка прямой (вектора) с кругом в основании 17. Данный индекс индицирует на КПИ место ЛА относительно ВПП и заданной траектории с точностью, обеспеченной радиотехническими и инерциальными системами, включенными в систему посадки ИИС ДАП и другими системами при заходе, посадке, пробеге и взлете.
Информационно индекс "Самолет-вектор" используется для индикации места положения ЛА и возможности его управления в горизонтальной плоскости по изменению положения вектора путевой скорости от требуемой (заданной) траектории.
Центр круга определяет положение условной точки пространства (например, середины отрезка прямой между задними стойками шасси). Координаты этой точки можно рассчитать по известным координатам фазового центра приемной антенны ЛА и его выноса относительного смещения этой точки для конкретного самолета. При посадке эту точку необходимо совместить на КПИ с расчетной точкой приземления на индексе ВПП. Направленный отрезок прямой (вектор) индицирует прогнозируемое направление смещения с учетом сил, действующих на ЛА в воздухе и на земле (при пробеге, разбеге).
Кроме этого, индекс "Самолет-вектор" имеет цветовую кодировку, сигнализирующую летчику (оператору БЛА) при заходе на посадку о положении ЛА в вертикальной плоскости. Если ЛА находится на заданной траектории, то весь индекс кодируется зеленым цветом (исходная кодировка). При отклонении ЛА от заданной траектории по глиссаде, если присутствует снижение по высоте, цветовая кодировка прямолинейного отрезка индекса принимает красный цвет, при превышении - желтый. Длина закраски вектора индекса "Самолет-вектор" пропорциональна величине отклонения от заданного режима.
Индекс появляется на МФИ при заходе на посадку (со стороны захода) в масштабе пропорциональном расстоянию до ВПП с дальности 40 км при переключении систем ДАП из режима "Навигация" в режим "Посадка". На дальности от 40 км до дальности 15 км индекс находится в поле зрения на МФИ ниже (слева или справа) индекса ВПП. На дальности менее 15 км и после посадки, при пробеге, разбеге индекс "Самолет-вектор" находится в центральной зоне МФИ (КПИ). Периодический контроль дальности до ВПП и индекса "Самолет-вектор" дает направление вектора путевой скорости и пространственное представление об относительном положении самолета и ВПП.
В процессе выравнивания индекс информирует летчика о правильности выбранного направления захода и расчета места посадки по оси ВПП и отклонениях от расчетной вертикальной скорости снижения, в том числе с помощью цветовой кодировки вектора.
Индекс "Самолет-вектор" перемещается по информационному полю КПИ относительно индекса ВПП и указывает взаимное положение ЛА и ВПП. Совместная индикация индексов "Самолет-вектор" и ВПП позволяет контролировать процесс выдерживания параметров ЛА при заходе на посадку, посадке, пробеге и взлете, в том числе в вертикальной плоскости на глиссаде и в процессе выравнивания.
На взлете с помощью "Самолета-вектора" летчику выдается информация о месте самолета на ВПП, которая используется для выдерживания направления взлета. При этом вектор индекса "Самолет-вектор", в момент отрыва начинает изменять цвет с зеленого на красный. Шкала "αзад-αтек" указывает на заданный угол атаки взлета, а взаимоположение индексов "Лидер" и "Самолет" укажут величину их рассогласования по тангажу.
Мнемонический указатель "Высота выравнивания" с цифровым индикатором 11, 12. Представляет собой прямоугольник белого цвета с цифровым указателем геометрической высоты Нг справа от него. Индицируется рядом с индексом ВПП, внизу справа. Верхняя часть прямоугольника совпадает с уровнем линии посадки (перпендикуляр к индексу ВПП, проходящий через расчетную точку посадки). Мнемонический указатель "Высота выравнивания" появляется на КПИ при нахождении ЛА на высоте Нг=15 м и удалении 100-200 м от торца ВПП, его окрашенная часть (площадь заливки) уменьшается в соответствии с уменьшением высоты, визуально информируя летчика об изменении относительной высоты до приземления. Контуры всего указателя до момента касания ЛА ВПП сохраняются прежними (фигура 11). Цифры справа показывают высоту Нг в метрах с дискретностью 0,5 м. Указатель обеспечивает отсчет высоты с начала выравнивания до касания по оставшемуся уровню заливки мнемонического указателя "Высота выравнивания" без необходимости отсчета высоты речевым информатором (или с дублированием).
Мнемонический указатель "Высота выравнивания" индицируется только при нахождении индекса "Самолет-вектор" в допустимой области исправления горизонтальных и вертикальных отклонений относительно ВПП.
Сочетание маркеров: мнемонический указатель "Высота выравнивания", индекс "Самолет-вектор" (его круглая часть движется рядом с нижней частью закрашенного сектора оставшейся высоты до касания и далее по ВПП), шкала текущего угла тангажа, шкала "αзад-αтек" (сигнализирует требуемое направление и количественную величину отклонения штурвала по тангажу) с визуализацией направления и места на ВПП, по своему восприятию позволяют достичь ассоциаций аналогичных виду ориентиров и положения самолета по высоте, положению, посадочному углу тангажа как при визуальной посадке. Кроме этого, на высоте 15 м индекс "Лидер" находится в режиме "Посадка" и в зависимости от высоты, угла тангажа, приборной скорости и скорости снижения индицирует директорную команду на отклонения рулей. В комбинации эти маркеры обеспечивают наглядную, поэлементную индикацию параметров процесса выравнивания и безошибочное управление ЛА.
Шкала угла атаки "αзад-αтек" 3,2. Индикатор шкала угла атаки "αзад-αтек" представляет собой стрелочные указатели αзад и αтек со шкалой, имеющей ограничения по αmin и αmax. Он предназначен для индикации αзад и αтек на этапах захода на посадку при приближении к ВПП, выравнивания до касания ВПП, безопасного отрыва ЛА на взлете.
При αзад=αтек, индицируется одна стрелка и шкала с цифровым указателем отсчета угла атаки зеленого цвета (фигура 9).
При αзад>αтек, указатель шкалы αтек кодируется сектором красного цвета, ограниченного снизу красной стрелкой αтек и сверху - зеленой стрелкой αзад с цифрой требуемого отклонения штурвала на себя до совмещения αзад=αтек. Величина отклонения определяется по величине сектора рассогласования и по положению индекса "Лидер", работающего в режиме "Посадка" (фигура 12).
При αзад<αтек, указатель шкалы αтек кодируется сектором желтого цвета, указывающим на необходимость уменьшения угла атаки от αтек (желтая стрелка) до αзад (зеленая стрелка), требующего отклонения штурвала от себя до αзад=αтек. Равенство определяется по совмещению стрелок αзад и αтек и по положению индекса "Лидер" относительно индекса "Самолет".
На взлете при скорости отрыва ЛА αзад индицируется стрелкой зеленого цвета. Стрелку αтек (красного цвета) необходимо совместить с αзад. При равенстве αзад и αтек, стрелка-указатель становится зеленой. Величину отклонения штурвала летчик контролирует по взаимоположению индексов "Лидер" и "Самолет", аналогично как при заходе и выравнивании. Индикация шкалы "αзад-αтек" прекращается после уборки механизации крыла.
При заходе на посадку шкала угла атаки "αзад-αтек" начинает индицироваться на геометрической высоте 30 м для индикации летчику заданного угла атаки на подходе к ВПП и дальнейшего процесса выравнивания ЛА до касания. Шкала "αзад-αтек" индицируется слева на КПИ. Ее расположение не затрудняет контроль пространственного положения ЛА по шкале тангажа ϑ. Сочетание данной шкалы, мнемонического указателя высоты выравнивания и индекса "Самолет-вектор" создает пространственный образ, подобный визуальной посадке с наглядной, легко читаемой по параметрам, информацией о направлении и месте ЛА относительно ВПП, заданного и текущего угла атаки в процессе выравнивания вплоть до касания ВПП.
Шкала "αзад-αтек" информационно дополняет шкалу тангажа и обеспечивает по наглядности более точное и быстрое создание и выдерживание заданного угла атаки при управлении штурвалом, традиционной ручкой управления, установленной по центру кабины между ног летчика или боковой ручкой управления сайдстиком (Side-stick) [4, с. 230] и облегчает точный вывод самолета на заданный угол αзад, при взлете или посадке. Наглядное представление величины рассогласования между положениями стрелочных указателей αзад и αтек помогает летчику сформировать соответствующую величину отклонения штурвала и проконтролировать его выдерживание в положении αзад. При точной установке на индикаторе остается только один вектор зеленого цвета с оцифровкой. Коррекция текущего угла атаки при отклонениях от заданного реализуется отклонением штурвала до совмещения стрелок αтек и αзад, что с учетом цветовой кодировки стрелок упрощает пилотирование на наиболее сложных режимах взлета и посадки.
Параметр αзад, в частности, может рассчитываться по методике, изложенной в [17].
Заданный и текущий путевой угол 13, 15. Указатели заданного (Ψзад) и текущего (Ψтек) путевого угла представлены на правой горизонтальной "консоли крыла" индекса "Самолет" в виде равносторонних треугольников с вершиной, направленной к индексу "Самолет". Служат для индикации заданного и текущего путевого угла. Линия заданного пути (ЛЗП) может задаваться как при полете по маршруту, так и при заходе на посадку, взлете.
Верхний индекс (заданный путевой угол) Ψзад, кодируется зеленым цветом, указывает направление и величину угла доворота для выхода на линию заданного пути. Рассчитывается по величине линейного отклонения по сигналам от ИНС и РТС. Летчику (оператору) необходимо "поставить" нижний индекс Ψтек коричневого цвета напротив верхнего путем доворота самолета влево, если он находится справа от верхнего директорного индекса, и доворотом вправо, если индекс Ψтек - слева. Индекс "Лидер" указывает сторону направления изменения Ψтек, а также величину крена для выхода на ЛЗП.
В случае отказа (сбоя) при формировании "Лидера" (сбой по информационному каналу крена) летчик может воспользоваться индексами заданного и текущего путевого угла как дублирующими директорами управления по направлению (крену). Кроме того, рассогласование индексов возникает при наличии угла сноса.
Летчик должен своевременно устранять возникающее рассогласование по заданному и текущему путевому углу, парируя его как по этим индексам, так и по индексу "Лидер", который кроме директорных команд по крену параллельно работает по Ψзад, Ψтек, и углу сноса. Определение изменения курса по командам индекса "Лидер" и индексам заданного и текущего путевого угла упрощает управление и повышает точность пилотирования при заходе на посадку, взлете.
Указатели приборной скорости и продольного ускорения 19, 20. Указатель приборной скорости предлагается в двух вариантах. Для индикаторов ЛА с вертикальным цифровым указателем высоты 33 и скорости 32 с фигурным рамочным табло с цифровым указателем текущей приборной скорости 36 и динамики ее изменения в двух примыкающих окнах предлагается индицировать цифру ожидаемого изменения скорости: индицировать только в одном окне со стороны увеличения или уменьшения величины скорости, другое окно остается свободным. Стрелкой индицируется также величина продольного ускорения 35. Такая индикация ускорит читаемость изменения текущей скорости и упрощает ее выдерживание при заходе и посадке (фигура 13), а также на всех этапах полета.
Для индикаторов ЛА с круглыми, стрелочными индикаторами высоты и скорости предлагается дополнительно индицировать цифровое значение текущей приборной скорости 19 и продольного ускорения 20 при заходе на посадку и посадке на прямолинейном отрезке ("левой консоли") индекса "Самолет". На пульте ввода исходных данных перед заходом на посадку, в зависимости от посадочного веса, метеорологических условий, высоты аэродрома, с учетом поправок на сдвиг ветра, устанавливается значение приборной скорости планирования. После выпуска механизации крыла цифровое значение текущей скорости индицируется светло коричневым цветом. При отличии текущей приборной скорости от установленной на ±10 км/час цвет цифр на указателе меняется на желтый и более чем ±15 км/час - на красный. Цветовая кодировка цифрового значения скорости может быть изменена.
Указатель продольного ускорения 20 представляет собой двухсекторный полуовал зеленого цвета, в нейтральном положении охватывающий с обеих сторон левый прямолинейный отрезок "левой консоли" индекса "Самолет" слева от цифрового указателя приборной скорости 19 (фигура 10). При наличии продольного ускорения зеленый сектор выходит наверх или низ отрезка. При дальнейшем увеличении или уменьшении продольного ускорения из сектора выходит вверх (фигура 4) или вниз (фигура 7) соответственно. Рекомендуется величину продольного ускорения индицировать указателем вида "↑" желтого цвета 20 (фигура 1), выходящем из полуовала зеленого цвета при наличии продольного ускорения. По мнению авторов, такое расположение цифрового указателя приборной скорости при планировании и посадке, а также его комбинация с указателем продольного ускорения не требует переключения внимания от КПИ, что повышает точность выдерживания скорости планирования и сокращает время реакции летчика на изменение значений скорости при сдвиге ветра и других причинах. Такое расположение маркеров упрощает контроль над скоростью на взлете и пробеге. На пробеге при недостаточности оставшейся длины ВПП для безопасного пробега, цифра скорости становится красного цвета и увеличивается в размере одновременно с появлением на табло надписи: "Тормози" слева от индекса ВПП (фигура 7). Фигура индикации нулевого значения продольного ускорения в виде двухсекторного полуовала выбрана из условий заметности для летчика при выдерживании заданного режима по скорости о начале изменений ускорения в малом диапазоне значений с целью упрощения выдерживания постоянных значений скоростей захода на посадку и обеспечения надежного контроля значения jx в процессе выравнивания. С началом выравнивания летчик контролирует уменьшение jx по переходу полуовала на нижнюю часть "консоли" индекса "Самолет", что обеспечивает режим заданного снижения скорости от скорости планирования (Vпл.), до скорости посадки (Vпос.), и приемлемый темп снижения от выравнивания до касания ВПП. При уменьшении jx ниже заданного значения в процессе выравнивания при оборотах двигателей ниже необходимых (из сектора полуовала выходит вектор вниз) из-за неожиданного сдвига ветра или по другим причинам, летчик увеличивает тягу двигателей и восстанавливает заданный jx (сектор полуовал без вектора). Возможность наглядного контроля и коррекции времени и темпа падения скорости от Vпл. до Vпос. в процессе выравнивания до касания является одним из основных критериев расчетной плавной посадки ЛА.
Указатель ветра 5. Указатель ветра выполнен в виде метеорологического знака: вектора с навигационным направлением ветра, в горизонтальной плоскости от 0° до 360°. Отрезок прямой линии указывает направление ветра, а количественное значение скорости ветра указывается в виде отрезков прямой, расположенных под углом 90° к нему. Короткий отрезок индицирует скорость, соответствующую скорости 5 м/с, длинный - 10 м/с. Скорость ветра в цифровом обозначении указывается рядом с указателем ветра в размере его фактического изменения. Направление ветра в градусах не указывается, т.к. представляется достаточно наглядно с помощью положения данного указателя на фоне индексов ВПП и "Самолет-вектор", что ускоряет и упрощает считывание информации о ветре (фигура 10 - ветер ~90°).
Указатель ветра расположен на информационном поле индикатора МФИ (вверху над КПИ) в центральном поле зрения летчика (оператора). Информационное сочетание указателя ветра с индексами ВПП и "Самолет-вектор", а также указателями приборной скорости, продольного ускорения, положения рычагов управления двигателями, путевого угла, угла сноса, индекса "Лидер" в центральном поле зрения позволяет своевременно учитывать и компенсировать влияние ветра и его изменение в процессе захода на посадку, посадки, пробега и взлета.
Направление, скорость ветра, вертикальный и горизонтальный сдвиг ветра рассчитываются в КОИ БЦВС с учетом значений от различных источников информации о параметрах ветра (ИНС, ДИСС, наземных метеостанций). По результатам расчетов вычислитель формирует директорные команды на индикацию индекса "Лидер", угла сноса и величину путевого угла с учетом их изменения за счет изменения ветра. Эти команды выдаются на КПИ с высоты 15 м при крене нескольких градусов из-за опасности близости ВПП (земной поверхности). Вертикальный сдвиг ветра, действующий на ЛА учитывается при формировании директорных команд индексов "Лидер" и "Самолет - вектор" в виде цветовой кодировки, а также шкалы угла атаки "αзад-αтек" по вертикальному направлению и цветовой кодировке, соответствующей необходимым управляющим действиям.
Изменение направления и силы ветра, выход за ограничения по боковой составляющей силы ветра, индицируется увеличением размера указателя ветра в 2 раза с изменением его цвета с белого на красный, а также появлению рядом с указателем ветра одного из сообщений: "Сдвиг ветра", "Попутный ветер", "Посадка запрещена", которые дают указания экипажу на действия по уходу на запасной аэродром (фигура 6).
Указатели режима работы двигателей и реверса 25. На МФИ представляются вертикально расположенными прямоугольниками по количеству двигателей с их нумерацией слева направо (фигура 9). При изменении режима работы двигателя происходит цветовая окраска снизу-вверх соответствующего ему прямоугольника с указанием, в цифровом значении (в процентах) числа оборотов двигателя для заданного режима. На фигуре 9 наглядно представлена цветовая окраска прямоугольных указателей при изменении режима работы двигателей. Снизу рядом с прямоугольниками могут выполняться надписи-указатели одного из режимов: МГ (IDLE) - малый газ, Н (N) - номинал, МАКС (МАХ) - максимальный режим, СТОП (STOP). На пробеге, при включении рычагов реверса, рядом с прямоугольниками для каждого двигателя, индицируются красные сегменты, сигнализирующие об открытии реверсных створок (фигура 14). При дальнейшем перемещении РУД на увеличение реверсивной тяги количество оранжевых сегментов увеличивается в соответствии с ростом достигнутого режима реверса двигателя и цифровым указателем.
Расположение указателей режима работы двигателей непосредственно на МФИ улучшает процесс управления ЛА, упрощает переключение внимания, т.к. не требует переноса взгляда пилота на другие МФИ и приборы кабины. Индикация реверса особенно важна на пробеге, при прекращении взлета или не включении реверса одного из двигателей.
Индекс "Глиссада" 34. Индекс показывает место ЛА в вертикальной плоскости относительно глиссады ВПП, определяемой по данным РЭК КИВ НП. Совместно с индексом "Лидер", индекс "Глиссада" служит для входа и выдерживания глиссады с заданной вертикальной скоростью. С высоты Нг=15 м (работают режимы выравнивания и посадки), индекс "Глиссада" находится в нейтральном (нулевом) положении. В режиме "Маршрут" индекс "Глиссада" может использоваться совместно с индексами "Лидер" и "Самолет-вектор" для осуществления, выдерживания и контроля заданного профиля полета ЛА в вертикальной плоскости. Форма индикации индекса может быть различной (фигуры 1, 13).
Координатный указатель аэродрома посадки 1. Указатель выполнен в виде знака Ψ с указанием значения истинного курса (магнитного курса) выбранной ВПП аэродрома посадки. Под значением выбранного курса посадки указываются широта и долгота в градусах, минутах и секундах торца ВПП выбранного направления. Перед полетом на пульте подготовки данных к полету указываются курс посадки, широта и долгота обоих направлений, торцов выбранной ВПП. При подходе к аэродрому посадки и переходе на режим "Заход" на пульте устанавливается номер выбранного аэродрома (например, АЭР1), его курс, широта и долгота белыми цифрами и буквами. На дальности 20 км символы координатного указателя направления и торца посадки принимают зеленую окраску.
Размещение на КПИ описанных символов, индексов, шкал и указателей без наложения друг на друга (за исключением индекса "Самолет - вектор", который "выходит" на индекс ВПП), а также расположение их в центральном поле зрения вместе с индексами "Самолет", "Лидер", шкалами углов крена, тангажа и скольжения, обеспечивают безопасность, простоту пилотирования, поэлементный контроль параметров при директорной или автоматической посадке или посадке вне видимости ориентиров на всех трех представленных видах индикации (фигуры 3, 4, 5).
При разработке системы индикации авторы исходили из необходимости обеспечения безопасности пилотирования благодаря формированию у летчика (оператора) приборного образа полета при заходе и посадке, в том числе вне видимости ориентиров, в директорном режиме, аналогичного визуальному образу. При этом ассоциации пилота, при использовании системы типовых и новых маркеров, простоты и наглядности их представления и взаимодействия, максимально приближены к визуальному восприятию захода и посадки при ручном пилотировании.
Предлагаемый вид индикации индексов "Самолет" и "Лидер", их индикация по крену, выбраны исходя из анализа результатов исследований, проведенных в летных экспериментах на самолетах-лабораториях [6], а также в работах [1-5, 9] по сравнительной эргономической оценке КПИ с различными видами индикации по крену и видами силуэтов самолета. Так, использование предлагаемого цельного силуэта самолета типа "чайка" по сравнению с "разрывным" силуэтом показал на 20% лучшие результаты по выводу самолета из сложного положения и на 15% меньшей психофизиологической напряженности летчика в обычных режимах полета с одинаковым видом индикации по крену.
Исходя из результатов проведенных исследований и опыта практической эксплуатации ЛА, использование индексов "Самолет" и "Лидер", предлагаемого вида, совместно с предложенными к изобретению маркерами улучшает читаемость взлетно-посадочной информации и значительно облегчает пилотирование и контроль над пространственным положением в длительном полете и заходе на посадку вне видимости в директорном и автоматическом режиме. Вид и порядок реализации индексов "Самолет" и "Лидер" не являются предметом изобретения, а выбраны исходя из общей рациональной читаемости пространственного положения и размещения новых маркеров.
Предлагается единая цветовая кодировка маркеров по отклонению от глиссады. Изменение цвета маркера требует изменения соответствующего изменения параметров полета, например, для индекса "Самолет - вектор", изменение с зеленого цвета на красный требует набора высоты, на желтый - снижения (аналогично для указателя шкалы угла атаки "αзад-αтек").
Обеспечен перекрестный контроль по параметрам полета, например, индекс "Самолет - вектор", индицирует положение ЛА относительно ВПП и направление движения по ВПП, кроме этого при отклонении от глиссады изменяется раскраска вектора. Это дает сигнал летчику (оператору) на изменение вертикальной скорости, а величину отклонения рулей определять по "Лидеру" 18, контроль осуществлять по указателю глиссады 34, индикаторам изменения вертикальной скорости 14 и высоты 16 (33). При этом обеспечивается своевременное определение момента начала отклонений управляющих рулей и контроль величины отклонений по индексу "Лидер".
Предлагаемая система индикация представлена в трех видах индикации на КПИ по крену: вид с Земли на самолет (фигура 3), вид с самолета на Землю с боковым отсчетом величины и стороны крена с "Зенитом" 27 (фигура 4) и комбинированным видом - с самолета на Землю с дугообразной шкалой по крену без оцифровки 28 и с боковой шкалой по крену с оцифровкой 29 (фигуры 5, 11). Комбинированный вид индикации может использоваться для упрощения восприятия пространственного положения самолета по крену и исключения ряда возможных ошибок ориентации летчика. Возможно также применение варианта индикации КПИ при виде с самолета на Землю с верхней дугообразной шкалой по крену без оцифровки 28 и ленточными шкалами скорости 32 и высоты 33 (фигура 13).
По взаимному расположению и информационному объему маркеров летчик (оператор) может сформировать приборный образ соответствующего этапа полета, аналогичный визуальному. Наглядность и информативность приборного образа в системе "ЛА-летчик" обеспечивает поэлементный контроль параметров движения ЛА по направлению, глиссаде, скорости на этапах снижения, выравнивания, посадки, пробега и взлета. С этой целью используются: индекс "Самолет", индекс "Лидер", индекс "Самолет-вектор", индекс ВПП, мнемонический указатель "Высота выравнивания" с цифровым указателем высоты, шкала угла атаки "αзад-αтек", указатели положения РУД и реверса, приборной скорости (Vпр), продольного ускорения jx и их цветовая кодировка. Управление происходит аналогично управлению ЛА по визуальным ориентирам при управлении выравниванием ЛА, положения расчетной точки посадки (РТП), направления пробега, оставшейся длины ВПП, скорости пробега и других элементов полета. Происходит осознанное, поэлементное управление ЛА так, например, мнемонический указатель "Высота выравнивания" (индицируется справа от индекса ВПП с высоты 15 м до касания) подобен визуальному выходу самолета на высоту выравнивания, с одновременным наблюдением "Самолета-вектора", который индицирует точность пилотирования по направлению и положению на ВПП. При достижении геометрической высоты Нг равной 30 м слева от индекса ВПП появляется шкала "αзад-αтек", которая индицирует заданный в данный момент и текущий углы атаки ЛА для их плавного совмещения, т.е. задает темп отклонения руля высоты в начале и в процессе выравнивания. Дальнейшее снижение высоты отслеживается по уменьшению уровня заливки сектора указателя "Высота выравнивания" с указанием геометрической высоты Нг через каждые 0,5 м вплоть до касания.
При изменении вертикальной скорости (Vy), и высоты от Нг равной 30 м до касания индекс "Лидер" работает в соответствии с необходимым изменением угла α от значения начала выравнивания до посадки. Летчик (оператор) совмещает индекс "Самолет" на КПИ с "Лидером" и выполняет посадку, наблюдая место посадки на индексе ВПП по "Самолету - вектору". При отказе индекса "Лидер" (убран с информационного поля) посадку можно завершить по шкале "αзад-αтек", мнемоническому указателю "Высота выравнивания", указателю приборной скорости Vпр, продольного ускорения jx, индексу "Самолет-вектор", указателям заданного (Ψзад) и текущего (Ψтек) путевого угла.
Использование предлагаемых маркеров, кроме указанных выше возможностей при заходе и посадке при периодическом пропадании (ухудшении) видимости, позволяет продолжить управление ЛА. Таким образом, в процессе выравнивания для управления ЛА можно определять:
- заданный в данный момент угол атаки αзад путем анализа данного параметра визуально, а также определять его по шкале "αзад-αтек";
- высоту выравнивания как визуально, так и по мнемоническому указателю "Высота выравнивания" (по оставшемуся уровню заливки);
- управляющее воздействие по направлению и тангажу визуально и по анализу (уточнению) индексов "Самолет-вектор", ВПП, "Лидер" и "Самолет".
Такое сочетание визуального и приборного восприятия обеспечивает наиболее рациональное, стереотипное распределение внимания летчика, а значит и более высокую степень надежности и точности пилотирования и является основным методом захода и посадки.
Индикация ветра и его изменения производится указателем ветра 5, который расположен на КПИ в центральном секторе поля зрения летчика (оператора). Информационное сочетание индексов ВПП и "Самолет - вектор" с указателем ветра, а также указателя продольного ускорения, указателя режима работы двигателей и реверса, приборной скорости, указателя директорного путевого угла и "Лидера" позволяет безошибочно устранять рулями и рычагами управления двигателей отклонения ЛА от глиссады при воздействии ветра.
Изменение направления и силы ветра, выход за ограничения по боковой составляющей силы ветра, индицируется увеличением размера указателя ветра в 2 раза с изменением его цвета с белого на красный, а также появлению рядом с указателем ветра одного из сообщений: "Сдвиг ветра", "Попутный ветер", "Посадка запрещена", которые дают указания экипажу на действия по уходу на запасной аэродром (фигура 6).
Отказ какой-либо из подсистем ДАП определяется по результату контроля достоверности параметров по сравнению с данными других работающих подсистем, включенных в модуль комплексной обработки информации БЦВС. Табло работающей подсистемы на КПИ переходит на другую подсистему автоматически. В предлагаемом варианте существует четыре информационные подсистемы ДАП 6, 7: КИВ НП 8, КГС 30, ИНС 9, спутниковые системы 10. При отказе какой-либо подсистемы ИИС ДАП переключается автоматически, согласно принятому приоритету по точности, с сигнализацией (миганием) уже переключившейся подсистемы для принятия решения о продолжении захода по ней (при соответствии метеоусловий) или ухода на запасной аэродром.
При отказе конкретного символа, индекса на КПИ происходит мигание этого символа и последующая его уборка, что говорит о необходимости перехода на информацию дублирующих маркеров системы индикации. Например, для индекса "Лидер" дублирование информации по высоте полета ЛА выполнено на КПИ по указателю глиссады, мнемоническому указателю "Высота выравнивания", указателю радиовысотомера в нижней части КПИ, цветовой кодировке индекса "Самолет-вектор".
Система индикации обеспечивает сигнализацию и продолжение выполнения взлетно-посадочных режимов по директорным командам дублирующих маркеров, в том числе информативность в особых случаях:
- при не выпуске шасси (фигура 8);
- при несимметричном реверсе;
- при превышении ограничений по скорости или направлению ветра (фигура 6);
- при необходимости экстренного торможения из-за недостаточной оставшейся длины ВПП (фигура 7).
Взаимодополняющая и эргономически связанная система индикации маркеров соответствует концепции безопасного полета, так как имитирует мнемоническую схему образа полета при выравнивании и посадке с визуализацией пространственного положения ЛА, положения по месту относительно ВПП и направления движения по ВПП при пилотировании по визуальным ориентирам в простых метеоусловиях.
Достоинством изобретения является то, что создана полная система индикации маркеров с дублированием, которая при полете по приборам соответствует визуальным ориентирам и их качественному и количественному поэтапному изменению при визуальном пилотировании. Принятое сочетание индексов и символов способствует сохранению методики распределения внимания и приемов техники пилотирования, как при визуальном, так и приборном выполнении указанных выше наиболее сложных этапов полета, что облегчает и сохраняет навык пилотирования для летчика (оператора).
Следует учитывать, что приведенное выше описание не предназначено для ограничения объема, применимости или конфигурации настоящего изобретения для любого случая. Скорее, оно будет являться удобным примером для типичного варианта реализации изобретения, а различные вариации представления маркеров могут быть выполнены без изменения основных функций, описанных в примерном варианте его осуществления без изменения подхода, применяемого в настоящем изобретении. Предлагаемая цветовая кодировка маркеров не является обязательной и может быть изменена в интересах конкретной разработки на основе изобретения. Диапазон и количественное изменение отдельных параметров индикации является индивидуальным для различных типов ЛА, имеющих отличные тактико-технические характеристики.
Система индикации допускает раздельное использование своих элементов, в качестве дополняющих существующие, а также при построении новых систем индикации. С помощью предлагаемой системы обеспечивается резервирование индикации полетной информации.
В качестве изобретения предъявляется система индикации взлета и посадки ЛА, где наряду с использованием традиционных маркеров используются новые: индекс взлетно-посадочной полосы (иная интерпретация), мнемонический указатель "Высота выравнивания" с цифровым индикатором, индекс "Самолет-вектор", шкала угла атаки "αзад-αтек", указатель ветра, а также порядок их работы и сценарий взаимодействия с традиционными маркерами, индицируемыми на КПИ в полете по приборам (в отсутствие видимости ориентиров), максимально приближенный к визуальному восприятию взлета, захода и посадки при ручном пилотировании.
Наглядность и простота предлагаемой к изобретению системы индикации позволяют отслеживать весь режим этапов полета (взлет, заход, посадка, пробег вне видимости земных ориентиров) с упреждением непосредственного воздействия на органы управления ЛА с учетом средней реакции летчика и инерционности системы управления.
Изобретение позволяет летчику по представленной на КПИ информации выполнять взлет, заход на посадку, посадку и пробег в директорном режиме, в том числе в отсутствие видимости, а также контролировать по параметрам полета автоматический режим посадки для немедленного перехода на целесообразный директорный заход на посадку при необходимости.
Технический результат заключается в повышении достоверности взлетно-посадочной информации, непрерывности формирования ее целостного объема для директорного захода и посадки на ЛА не оборудованных системой автоматической посадки, а также полноты включения летчика в контур управления для контроля над данным процессом при автоматическом режиме с возможностью перехода на директорное управление на любом этапе пилотирования. Все это обеспечивает расширение эксплуатационного диапазона применения ЛА, снижения метеорологических минимумов, повышение безопасности полетов, осуществление взлетно-посадочных режимов в любое время года и суток, в том числе при отсутствии видимости, а также снижение психофизиологической напряженности при контроле режимов полета, наглядности и читаемости параметров, простоту действий летчика (оператора) в усложненной ситуации и в длительных полетах, сокращение сроков обучения и восстановления техники пилотирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2013 |
|
RU2539708C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПИЛОТАЖНО-НАВИГАЦИОННОЙ ИНФОРМАЦИИ НА МНОГОФУНКЦИОНАЛЬНОМ ИНДИКАТОРЕ ДЛЯ ВЫПОЛНЕНИЯ ПОСАДКИ | 2005 |
|
RU2297596C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2002 |
|
RU2207514C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2020 |
|
RU2778716C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
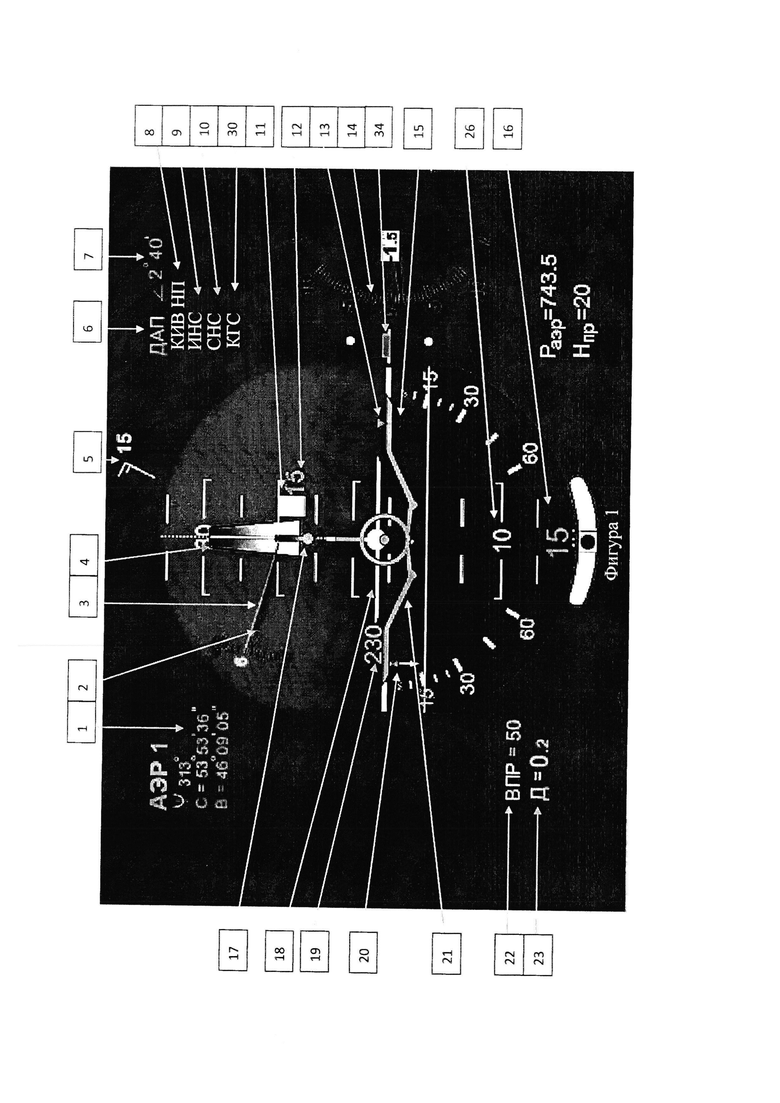
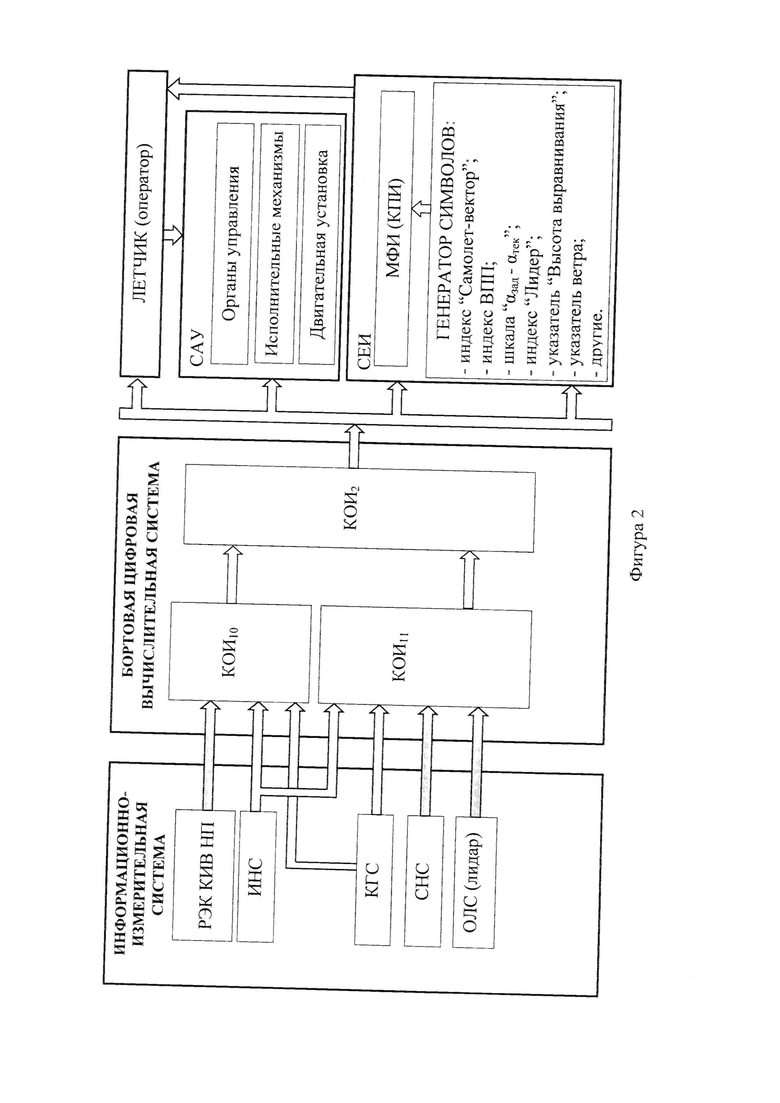
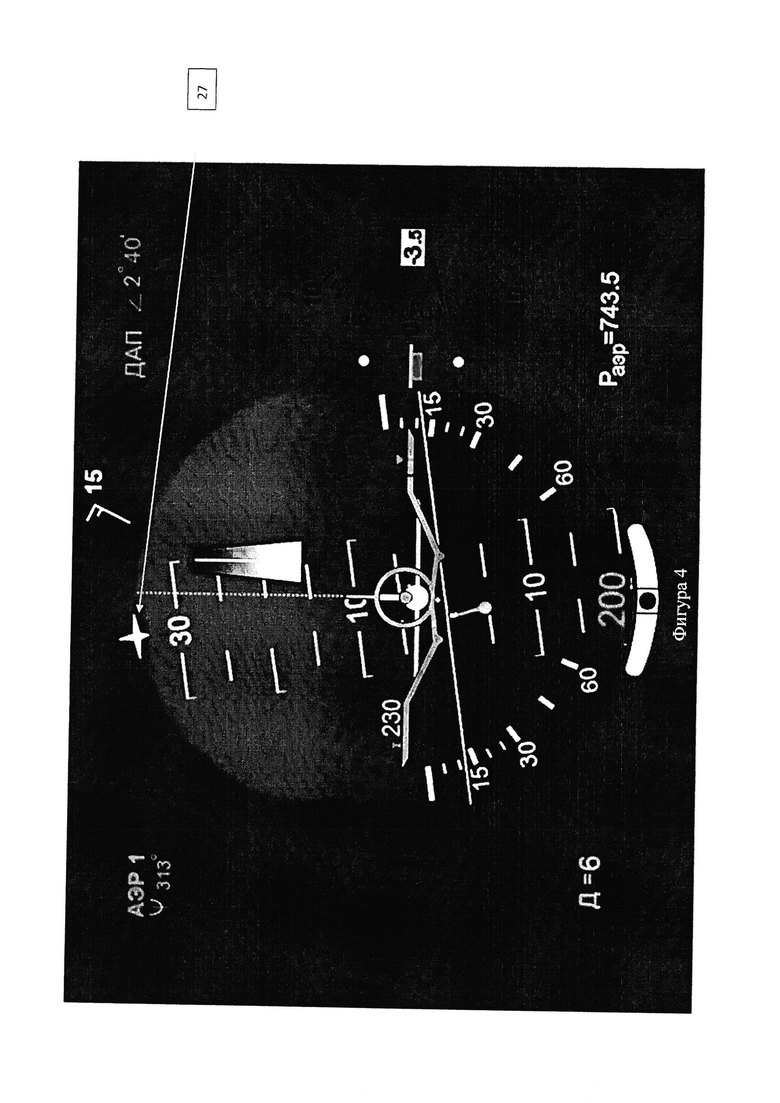
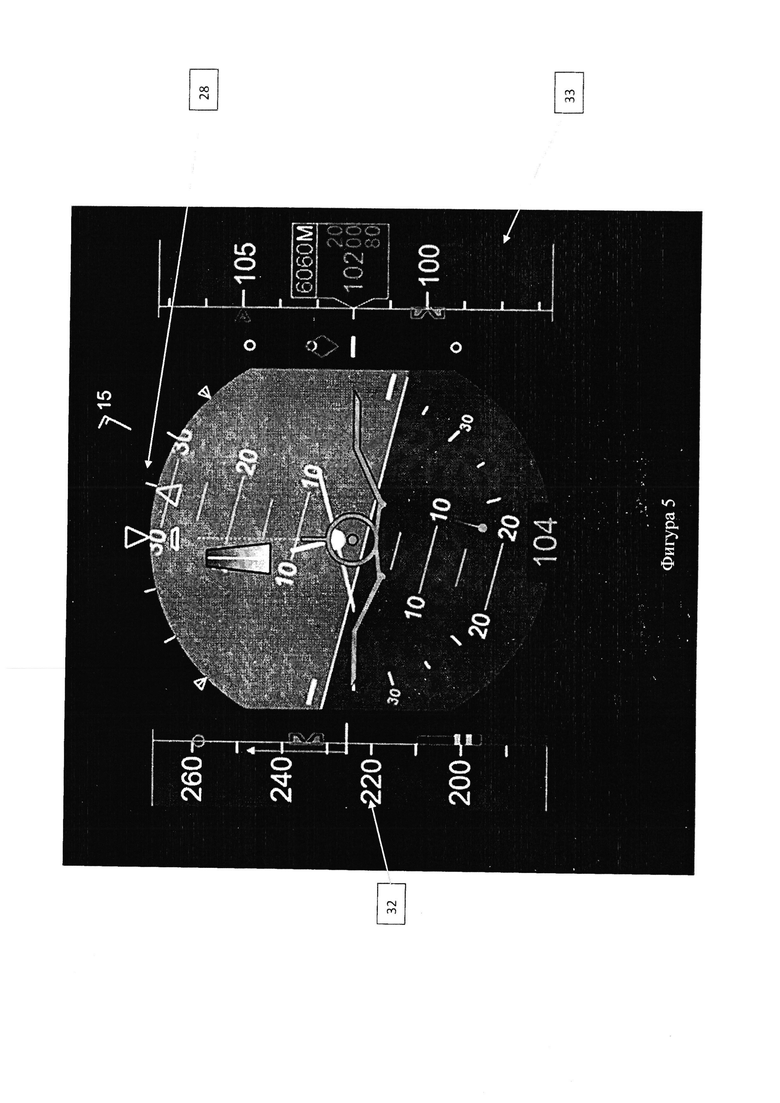
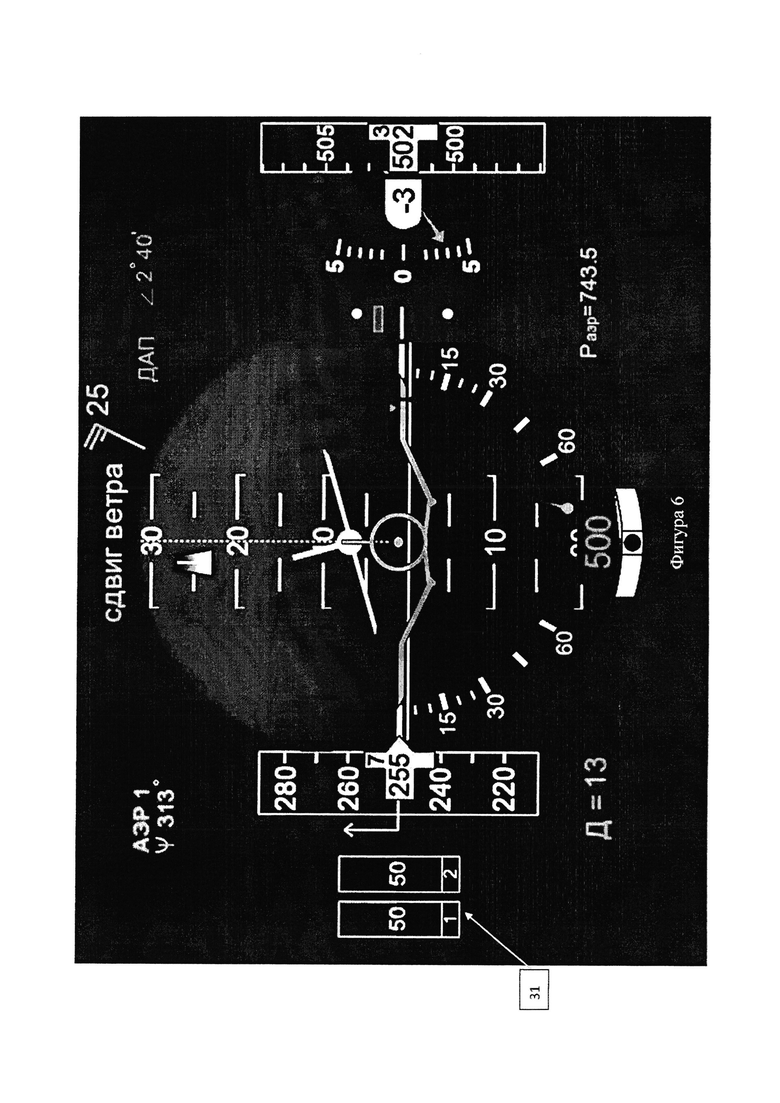
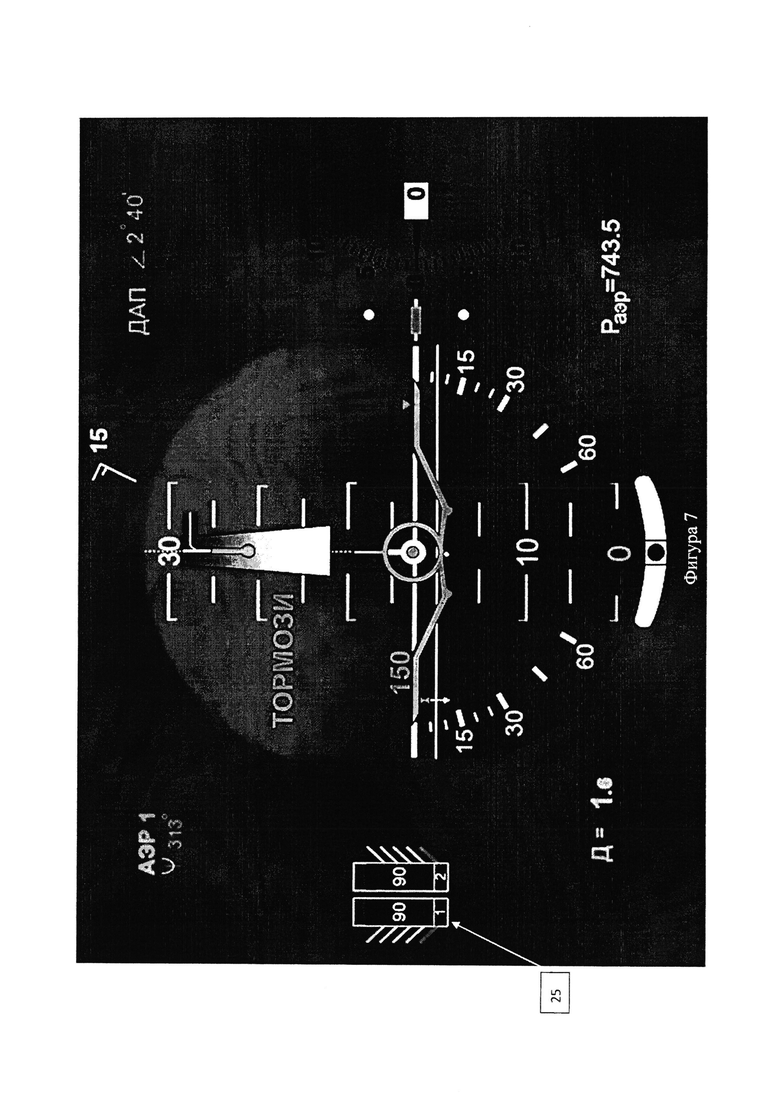
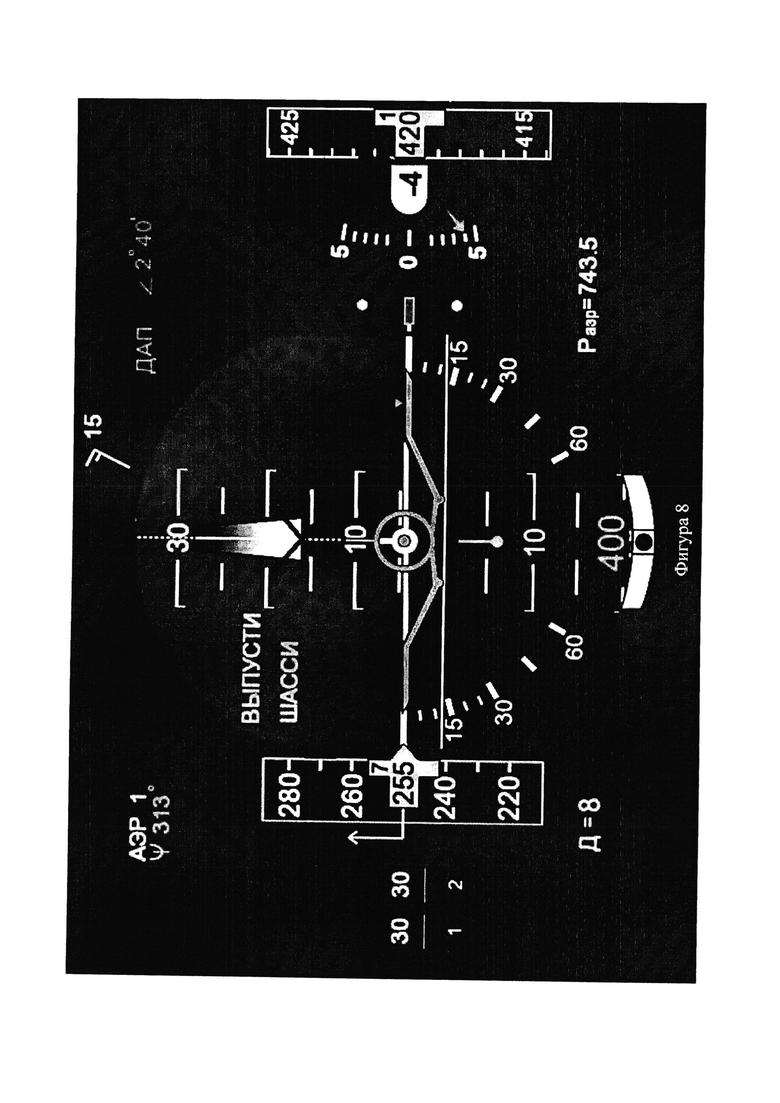
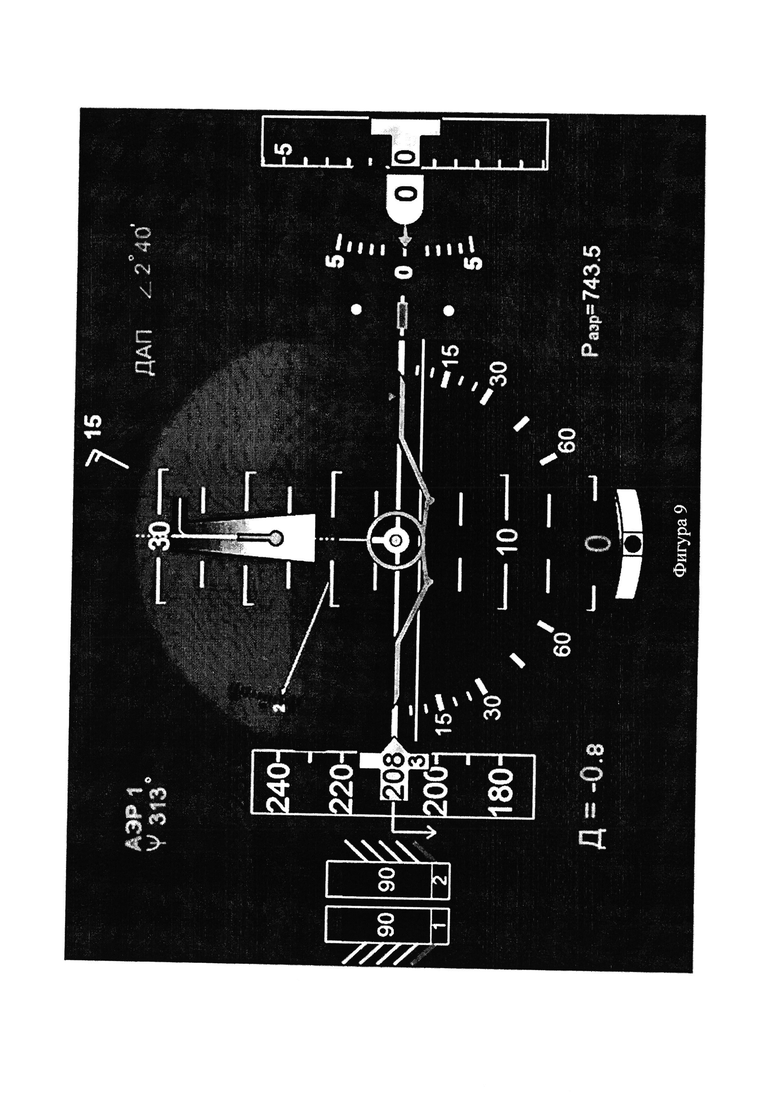
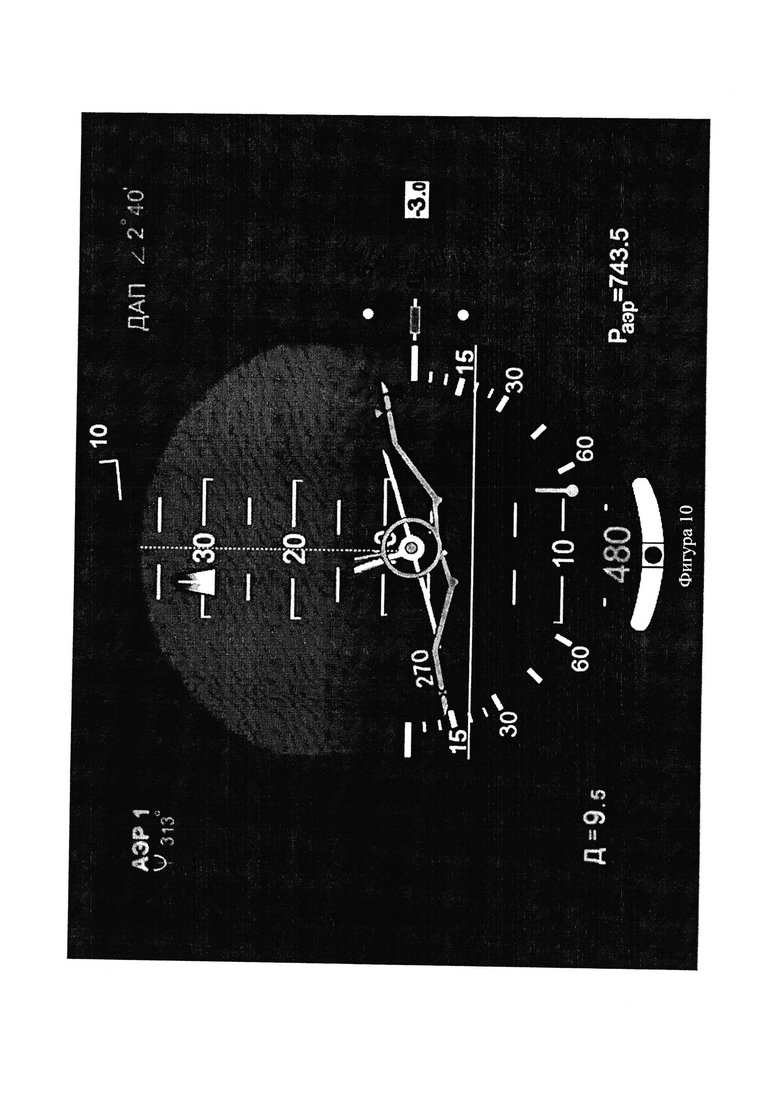
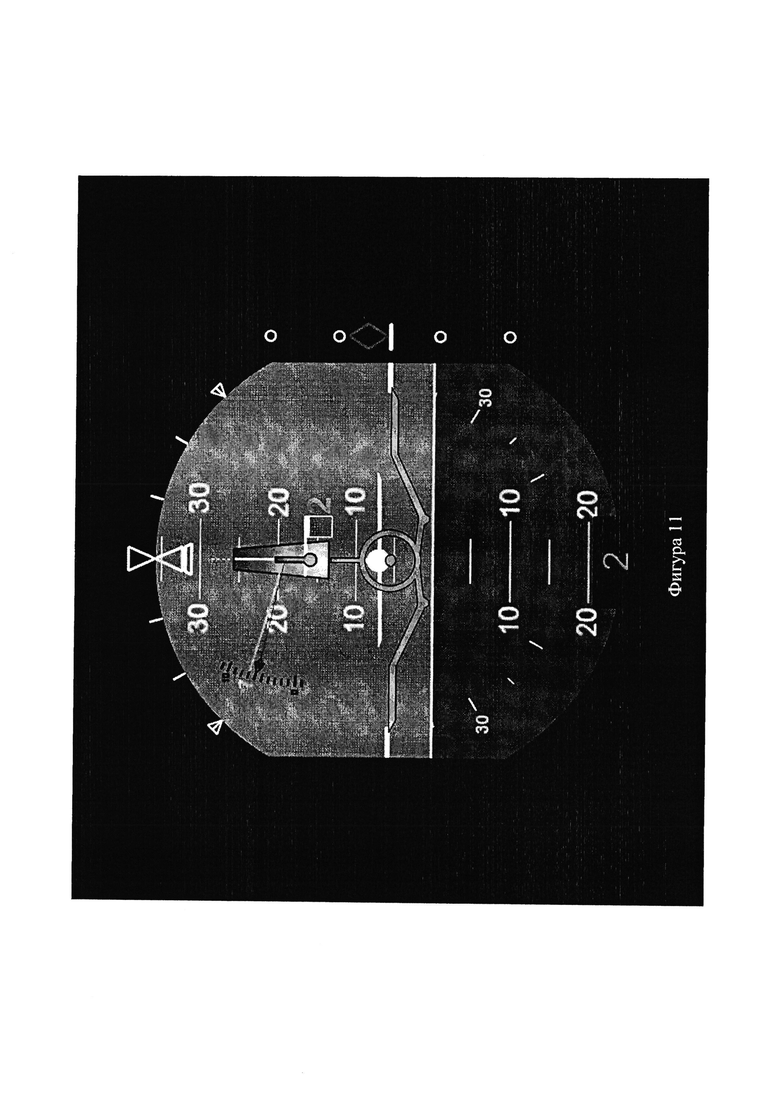
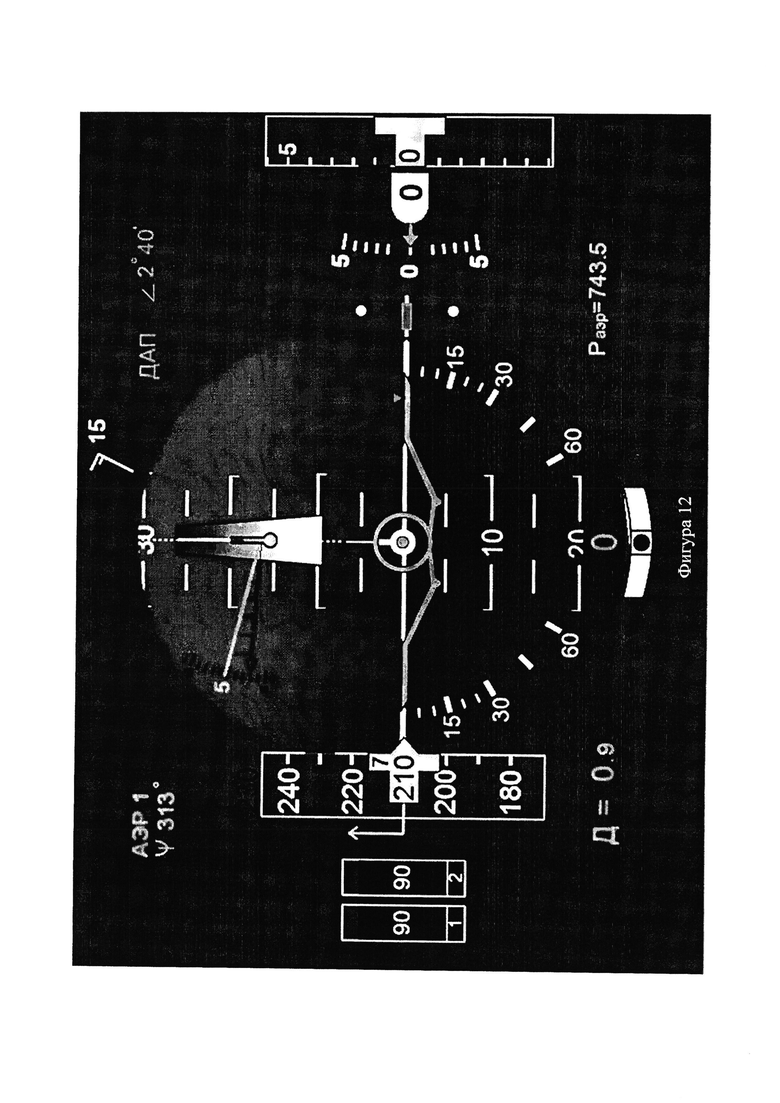
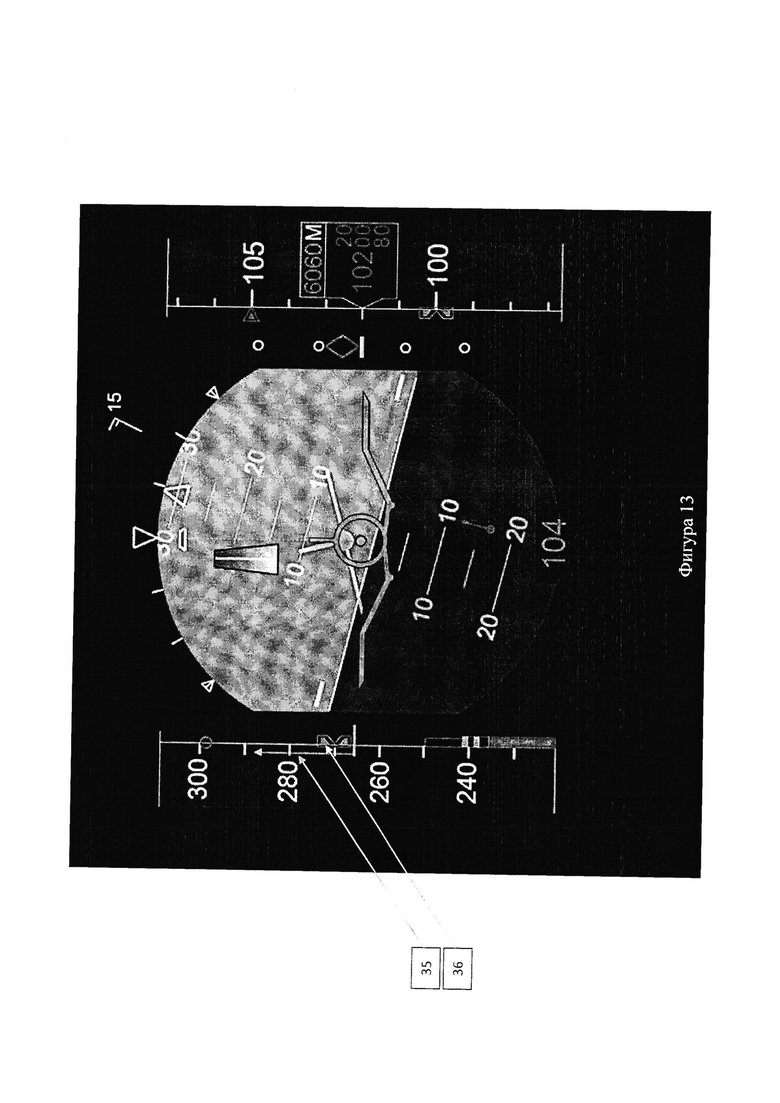
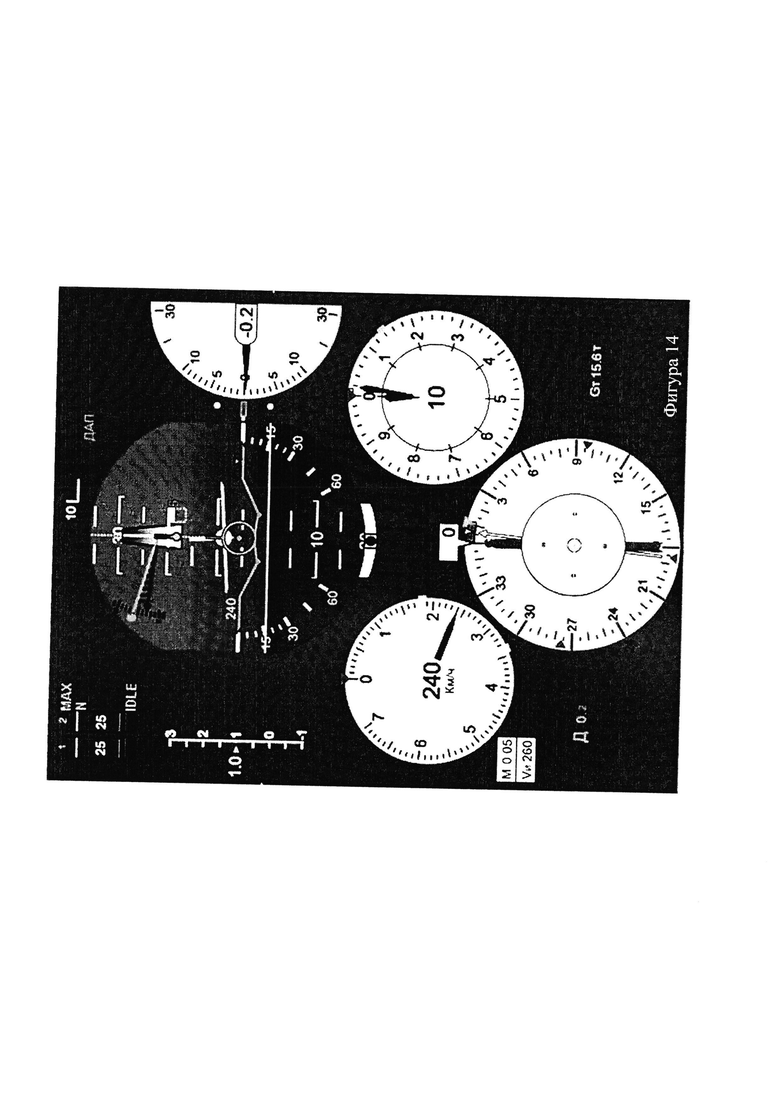
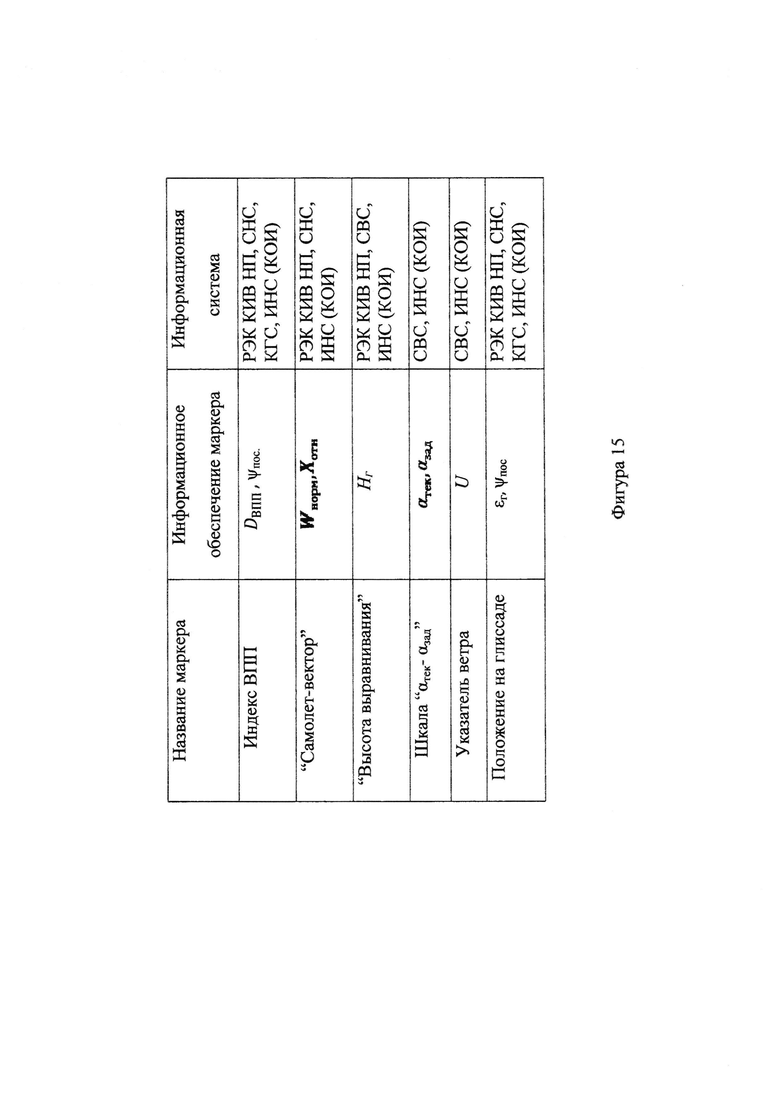
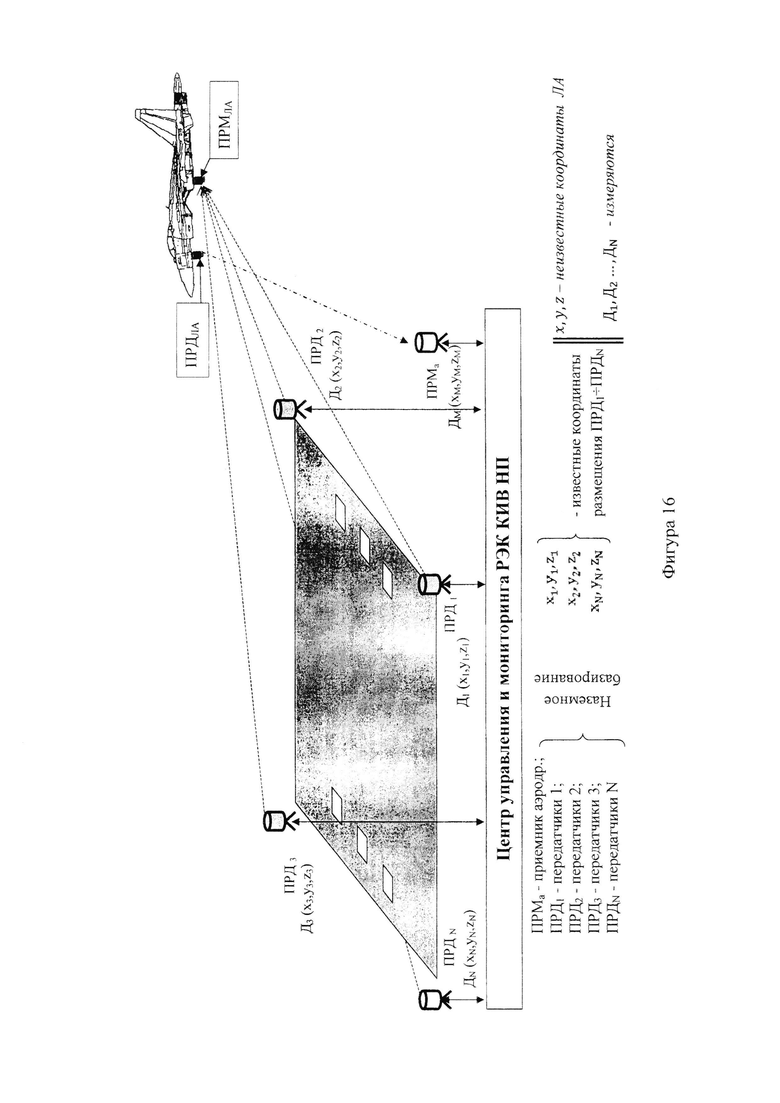
Система индикации взлета и посадки содержит командно-пилотажный индикатор, информационно-измерительную систему (ИИС), бортовую цифровую вычислительную систему, систему автоматического управления, систему единой индикации с отображением на экране набора определенных индикационных маркеров. ИИС содержит радиоэлектронный комплекс командно-информационного взаимодействия навигации и посадки, инерциальную навигационную систему, курсоглиссадную систему, спутниковую навигационную систему, оптическую локационную систему. Обеспечивается увеличение осведомленности летчика о параметрах полета и повышение безопасности и точности пилотирования в сложных метеоусловиях. 3 з.п. ф-лы, 16 ил.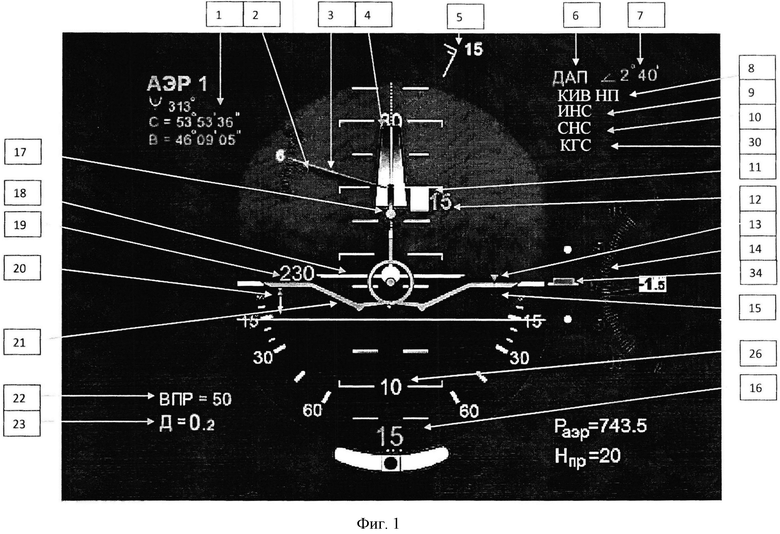
1. Система индикации взлета и посадки, содержащая командно-пилотажный индикатор, выполненный с возможностью обработки данных от информационно-измерительной системы (ИИС), состоящей из радиоэлектронного комплекса командно-информационного взаимодействия навигации и посадки (РЭК КМВ НП), инерциальной навигационной системы (ИНС), курсоглиссадной системы (КГС), спутниковой навигационной системы (СНС), оптической локационной системы (ОЛС); бортовую цифровую вычислительную систему (БЦВС); систему автоматического управления (САУ); систему единой индикации (СЕИ), выполненную с возможностью отображения на экране набора известных индикационных маркеров:
- координатный указатель аэродрома посадки АЭР;
- курсовой угол ВПП аэродрома посадки - ψпос., широта - ϕ, долгота - λ;
- информационный указатель выбранной системы посадки: директорная или автоматическая посадка (ДАП);
- индикаторы заданного и текущего путевого угла Ψзад, Ψтек;
- индикаторы режима работы двигателя и реверса;
- шкала вертикальной скорости с цифровым указателем;
- цифровой указатель геометрической высоты Нг;
- цифровой указатель приборной скорости Vпр;
- указатель продольного ускорения jx;
- высота принятия решения (ВПР);
- индекс взлетно-посадочной полосы (ВПП);
- дальность до торца ВПП;
- шкала тангажа;
- индекс "Глиссада", включающий маркеры "Лидер" и "Самолет", а также новых:
- мнемонический указатель "Высота выравнивания" с цифровым индикатором;
- индекс "Самолет-вектор";
- шкала угла атаки "αзад-αтек";
- указатель ветра- U.
2. Система индикации взлета и посадки по п. 1, отличающаяся тем, что индекс "Самолет" выполнен в виде цельной симметричной фронтальной фигуры стилизованного изображения профиля самолета с нижним расположением крыла, примыкающие снизу к "фюзеляжу" (окружности), с последующим выходом к "консолям крыла" (прямолинейные отрезки фигуры силуэта), спроецированным на уровень середины "фюзеляжа", по центру к окружности примыкает вертикальный отрезок "киль", размер окружности позволяет делать отсчет текущей величины тангажа, не закрывая обзор шкалы, внутри окружности расположена центральная точка данного индекса, для более точного учета угла тангажа, горизонтальные участки индекса "Самолет" служат для отсчета величины крена по боковой шкале на КПИ, индекс "Самолет" представлен для индикации пространственного положения самолета на КПИ, как с подвижным по крену (при обратной индикации) с боковым отсчетом стороны и величины крена по шкале, сопряженной с неподвижным горизонтом, так и с неподвижным (при прямой индикации) с боковым отсчетом стороны и величины крена по шкале, сопряженной с подвижным горизонтом, боковая шкала крена с оцифровкой совместно с предлагаемым цельным индексом "Самолет" типа "чайка", индекс "Лидер", представляющий собой симметричную фигуру фронтального профиля самолета, состоящую из окружности "фюзеляж", примыкающих к ней двух горизонтальных отрезков "крылья" и вертикального отрезка "киль", индексы "Лидер" и "Самолет" отличаются по цветовой раскраске, индекс "Лидер" перемещается относительно центра симметрии индекса "Самолет" вверх-вниз, а также поворачивается вокруг своего центра, по вертикали перемещается в зависимости от заданного режима полета в вертикальной плоскости в соответствии с любой из пар директорных команд, формируемых по отклонениям по тангажу δϑ и углу наклона траектории ΔΘ или по заданной высоте ΔНзад и вертикальному отклонению от глиссады планирования εг; во фронтальной плоскости "Лидер" поворачивается вокруг своего центра симметрии в соответствии с директорной командой, формируемой по значению δγ; управляется директорными командами по крену и тангажу без изменения его положения по линии горизонта и размерам в зависимости от скорости.
3. Система индикации взлета и посадки по п. 1, отличающаяся тем, что индекс ВПП работает после включения режима "Посадка", изменяет свои линейные размеры в зависимости от дальности, перемещается по полю экрана, выполнен схематично в виде обобщенной модели ВПП, не воспроизводящей ВПП как натурный объект, индекс "Лидер" не изменяет свои линейные размеры в зависимости от скорости и свое место по горизонтали относительно центра индекса "Самолет", других маркеров, препятствующих восприятию рассматриваемых, в зоне индикации нет.
4. Система индикации взлета и посадки по п. 2, отличающаяся тем, что индексы "Лидер" и "Самолет" отличаются по форме и цветовой раскраске.
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| Способ сушки и консервирования дерева | 1933 |
|
SU39960A1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| US 9174742 B2, 03.11.2015 | |||
| US 5952570 A1, 14.09.1999. | |||

