Изобретение относится к области авиации, а именно к системам информационного обеспечения летчика данными о параметрах полета, представляемых на многофункциональный индикатор (МФИ) в кабине самолета для выполнения полета по сложным пространственным траекториям с высокими точностями, в том числе и для захода на посадку в режиме пилотирования по приборам при минимуме погоды не хуже, чем по III категории ИКАО. При наличии источника информации о точном положении самолета в пространстве (спутниковой навигационной системы СНС с дифференциальным режимом, или высокочастотного посадочного локатора, или бортового локатора) предлагаемое информационное обеспечение позволит выполнить заход на посадку и посадку без применения системы автоматической посадки вне видимости земли, что особенно важно для самолетов, на которых таких систем нет.
В начале восьмидесятых годов в составе бортового оборудования ЛА начали широко использоваться бортовые цифровые вычислительные машины (БЦВМ) и электронные дисплеи (индикаторы) на электронно-лучевых трубках, а затем и на жидких кристаллах (ЖКИ). Такими индикаторами оборудовались все вновь выпускаемые самолеты зарубежного и отечественного производства. В нашей стране это были самолеты Ил-96 300, Ил-114, Ту-204, Ту-214 и др. За рубежом это самолеты фирм "Боинг", "Эрбас" и др. Сначала на таких индикаторах информация летчику представлялась в виде повторения на экране лицевых частей обычных приборов с учетом возможностей и ограничений существующих дисплеев. Далее необходимо переходить на визуальное пилотирование и завершать полет, имея визуальный контакт с ВПП и информацию о полетных параметрах, выдаваемые системой индикации.
В визуальном полете на этапе предпосадочного снижения летчик контролирует положение самолета в пространстве относительно земли, ВПП, линии горизонта и непрерывно просчитывает, куда снижается самолет, выполняя корректирующие действия органами управления для выдерживания самолета на заданной траектории полета.
Известен способ формирования на командно-пилотажном индикаторе информации летчику для выполнения посадки, включающий отображаемые на экране отчетный индекс - изображение текущего положения самолета, подвижный индекс, изображающий требуемое положение самолета в пространстве, имеющий возможность перемещения по вертикали и по горизонтали относительно неподвижного индекса, управление осуществляется подвижным индексом в соответствии с величинами ошибок по углу тангажа и по углу крена, таким образом, что подвижный индекс совмещают с неподвижным. Размеры подвижного индекса изменяются в зависимости от ошибок управления по курсу, по глиссаде (см. патент РФ №2207514, 2003 г.). Недостатком этого способа является то, что изменение размеров подвижных индексов не связаны с положением самолета в пространстве. Для устранения этого недостатка нужно использовать метод трехмерной графики для представления информации на индикаторе.
По мере совершенствования бортовых вычислительных машин и появления новых источников информации (например, СНС) появились возможности повысить качество и точность управления ЛА по приборам за счет построения информационного обеспечения летчика на основе методов 3-х мерной графики и использования информации о векторе скорости полета относительно земли.
Однако по-прежнему присутствует два центра пилотирования, которые летчик должен отслеживать в процессе полета.
Известен способ формирования и представления информации летчику о направлении траектории полета ЛА. При использовании вектора скорости на индикаторе изображается положение вектора скорости, который показывает, куда движется самолет, символ вектора скорости - подвижный, а силуэт самолета, как правило, неподвижный по тангажу и может вращаться по крену или не вращаться, в зависимости от способа индикации. Задача летчика сводится к тому, чтобы изменением параметров полета (крена, тангажа, скорости) добиться перемещения символа вектора скорости в требуемое положение и при этом находиться строго на заданной траектории полета. Образно говоря, на экране летчика есть как бы два центра пилотирования, которые он должен одновременно отслеживать. Кроме того, дополнительно на дисплей выводится информация о положении самолета в пространстве относительно заданных траекторий полета или предпосадочного снижения (см. патент US 6272404 B1).
Практика использования такого представления информации показывает, что летчик может выполнить заход на посадку при метеоминимуме только в условиях I-ой категории ИКАО.
Известен способ посадки по индикатору при использовании на индикаторе символа вектора скорости, символа ВПП и других параметров, необходимых для пилотирования. По этому способу летчику во время посадки на индикаторе необходимо совмещать символы вектора путевой скорости и взлетно-посадочной полосы (см. патент EP 0384993, 2003 г.).
Однако из-за наличия двух центров пилотирования летчику будет сложно выполнить посадку ЛА, что снижает качество, точность управления и ухудшает удобства пилотирования.
Задачей изобретения является создание способа формирования пилотажно-навигационной информации летчику на многофункциональном индикаторе для выполнения посадки в сложных метеоусловиях, обеспечивающего повышение качества, точности, удобства пилотирования при посадке, снижении нагрузки на летчика, повышении безопасности полета.
Сущность изобретения.
Целью изобретения является создание на основе методов 3-х мерной графики и информации о векторе скорости такого способа представления информации летчику, который позволит выполнить заход на посадку при минимуме посадки, соответствующего III категории ИКАО при пилотировании по приборам.
Кроме того, позволит при полете по приборам использовать навыки визуального полета и одновременно снизить нагрузки на летчика.
Способ формирования пилотажно-навигационной информации на многофункциональном индикаторе для выполнения посадки включает точное измерение, выдачу потребителям всех необходимых параметров движения самолета и его положения в пространстве относительно земли и ВПП, отображение на пилотажном индикаторе летчика (КПИ) формата, на котором изображена ВПП с продолженной осевой линией, неподвижная центральная точка, относительно которой происходит передвижение внешних объектов, измерение значений высоты ЛА по радиовысотомеру, барометрической высоты, линии горизонта, изображение ЛА, символа вектора скорости. Согласно изобретению отображения ВПП, земли и линии горизонта проецируют на экран, ось визирования которого направляют по вектору скорости так, что он является центральной частью экрана. Проецируют в центр экрана символ в виде неподвижного силуэта самолета. Формируют перемещаемую по заданной траектории с той же скоростью, что и ЛА, находящуюся на расстоянии 2-3 км впереди него в заданном коридоре движения прицельную метку и проецируют ее на экран в виде рамки. Летчик посредством отклонения рычагов корректирует угол наклона условного вектора скорости, значение которого определяют в вычислителе после фильтрации и суммирования сигналов угла тангажа и угла наклона истинного вектора скорости самолета. Контролирует и выдерживает центр прицельной метки в центре экрана. При этом фактический вектор скорости направляется в упрежденную точку, движущуюся по траектории посадки, обеспечивая плавный выход самолета на заданную траекторию и последующее движение по расчетной траектории, выполняя посадку по приборам с достаточной степенью точности.
Кроме того, для обеспечения полета по приборам при заходе на посадку на высоте менее 30 м формируют прицельную метку посадки и проецируют на экран в виде буквы "Т", лежащей в начале зоны точного приземления на ВПП, которая при пересечении самолетом торца ВПП начинает движение по оси ВПП со скоростью, меньшей скорости самолета. При этом дополнительно на экране на изображении ЛА появляются стрелки радиовертикальной скорости, столбик радиовысоты, заканчивающийся символом "тень самолета", уменьшается по мере убывания радиовысоты ЛА, а символ "тень самолета" увеличивается в размерах при уменьшении радиовысоты. Летчик, выдерживая точку вектора скорости на прицельной метке посадки, гарантированно приводит самолет в место точного приземления.
Перечень фигур на чертежах.
На фиг.1 показано изображение пилотажно-навигационной информации на многофункциональном индикаторе при выполнении 4-го разворота и заходе на посадку, где
1 - центральная точка экрана, совмещенная с "условным вектором скорости"; 2 - силуэт самолета, вращающийся вокруг продольной оси (или неподвижный) в зависимости от вида индикации;
3 - ВПП с осевой линией, выходящей за пределы полосы до дальности, равной дальности до самолета;
4 - визуализация воздушного коридора;
5 - комбинированный указатель дальности до ВПП и бокового отклонения;
6, 7, 8 - указатели приборной скорости полета; барометрической высоты полета, путевых углов с символом заданного путевого угла;
9 - шкала перегрузок Ny;
10 - барометрический указатель скорости Vy;
11 - прицельная метка в виде рамки.
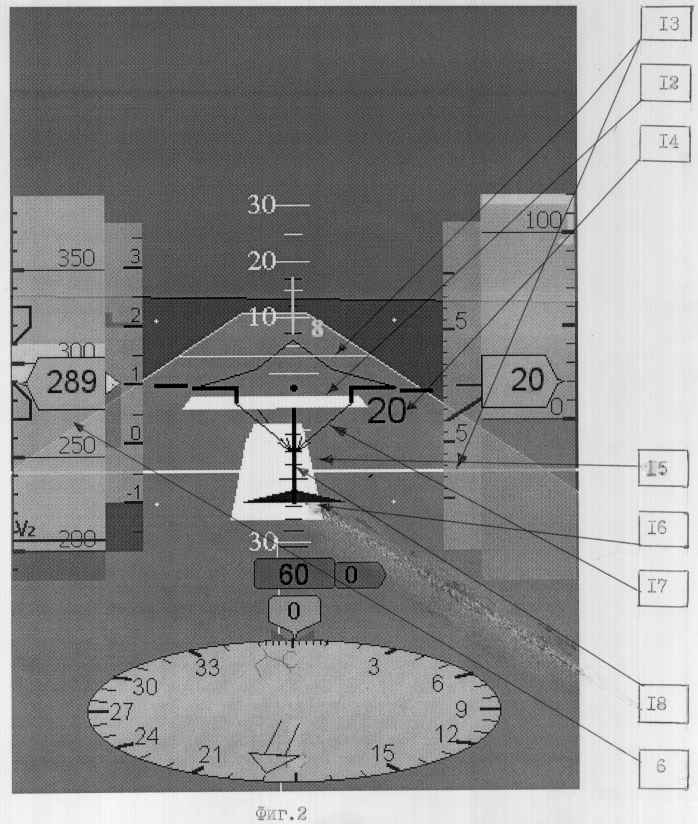
На фиг.2 показано изображение пилотажно-навигационной информации на МФИ, в соответствии с изобретением, при выполнении захода на посадку на высоте менее 30 м, где
12 - прицельная метка посадки в виде буквы "Т", лежащей в начале зоны точного приземления на ВПП;
13 - зона полного приземления, зона допустимых отклонений над торцом ВПП;
14 - цифровой указатель радиовысоты;
15 - указатели радиовысоты и радиовертикальной скорости Vy;
16 - символ "тень самолета" на конце столбика НРВ;
2 - силуэт самолета;
6 - указатель приборной скорости;
17 - стрелки радиовертикальной скорости снижения для индикации реальной скорости приближения самолета к земле;
на основе методов 3-х мерной компьютерной графики и использования информации о векторе скорости полета относительно земли.
На экране МФИ в кабине ЛА синтезируется схематическое изображение внешнего мира в виде ВПП 3 с осью, продолженной в направлении захода на посадку, траектории посадки, состоящей из прямолинейного участка, расположенного на высоте H=400-600 м до пересечения его с глиссадой, глиссады, исходящей из расчетной точки касания (200-300 м вглубь от торца ВПП), и прямоугольного окна (рамки), перемещаемого по траектории посадки - прицельной метки 11 (см. фиг.1).
Линия визирования при проектировании этого схематического изображения внешнего мира на плоский экран направлена по вектору скорости полета, поэтому центральная точка 1 экрана является следом от вектора скорости.
Окно (рамка) 11, размеры которого определяются из допустимых отклонений от траектории посадки (±20 м по боковому отклонению и ±5 м по вертикальному отклонению), перемещается по заданной траектории с той же скоростью, что и ЛА, и находится на расстоянии 2-3 км впереди него.
В качестве примера на фиг.1 показан заход на посадку вне визуальной видимости земли, на которой изображен момент выполнения 4-го разворота при заходе на посадку.
Для обеспечения выхода на траекторию посадки и движения по ней совмещают центр экрана 1 с центром окна (рамки) 11. В этом случае условный вектор скорости направляется в некоторую упрежденную точку, движущуюся по траектории посадки, и тем самым обеспечивается плавный выход на заданную траекторию и последующее движение по ней.
Кроме того, на пилотажном индикаторе летчика (КПИ) отображены неподвижная центральная точка 1, размещенная в центральной части экрана, ось визирования которого направляют по условному вектору скорости, точка 1 показывает, куда движется самолет относительно ВПП и горизонта, изображенных на экране, относительно которой происходит передвижение внешних объектов для точного измерения и выдачи потребителям все необходимые параметры движения самолета и его положения в пространстве относительно земли и ВПП. Для точного измерения и выдачи потребителям всех необходимых параметров движения самолета и его положения в пространстве относительно земли и ВПП на экране показаны указатели барометрической высоты полеты 7, приборной скорости 6, путевых углов 8, линии горизонта, комбинированный указатель дальности по ВПП 5 и бокового отклонения. Изображение силуэта самолета 2 показано вращающимся вокруг продольной оси (или неподвижным, в зависимости от вида индикации). По степени наклона силуэта относительно линии горизонта можно судить о крене самолета. На символе самолета индицируются передние кромки крыла, по изменению формы которых можно судить о величине углов атаки, счетчик которых находится справа вверху в районе "киля" самолетика. Визуализация воздушного коридора 4, в котором летчик должен выдержать самолет, достигается с помощью четырех рядов движущихся точек, имеющих начало по боковым кромкам ВПП на расстоянии 300 м от торца ВПП. Отображения ВПП, земли и линии горизонта проецируют на экран, ось визирования которого направляют по вектору скорости так, что он является центральной частью экрана, проецируют в центр экрана символ в виде неподвижного силуэта самолета. Формируют перемещаемую по заданной траектории с той же скоростью, что и ЛА, находящуюся на расстоянии 2-3 км впереди него в заданном коридоре движения прицельную метку и проецируют ее на экран в виде рамки 11, летчик посредством отклонения рычагов корректирует угол наклона условного вектора скорости, значение которого определяют в вычислителе после фильтрации и суммирования сигналов угла тангажа и угла наклона истинного вектора скорости самолета, контролирует и выдерживает центр прицельной метки в центре экрана, при этом фактический вектор скорости направляется в упрежденную точку, движущуюся по траектории посадки, обеспечивая плавный выход самолета на заданную траекторию и последующее движение по расчетной траектории, выполняя посадку по приборам.
Таким образом, если совместить ось визирования изображения ВПП с направлением условного вектора, то обеспечивается совмещение указанных выше двух центров управления в один. Для реализации этого принципа центр экрана с неподвижным индексом соответствует условному вектору скорости, относительно которого перемещаются символ ВПП 3 и изображение заданной траектории.
Для обеспечения полета по приборам при заходе на посадку на высоте менее 30 м для точного измерения и выдачи потребителям всех необходимых параметров движения самолета и его положения в пространстве относительно земли и ВПП (см. фиг.2), где на экране показаны силуэт самолета 2, зона полного приземления 13, шкала скорости 6, указатель радиовысоты и радиовертикальной скорости РВ 15, формируют прицельную метку посадки 12 и проецируют на экран в виде буквы "Т", лежащей в начале зоны точного приземления на ВПП, которая при пересечении самолетом торца ВПП 3 начинает движение по оси ВПП 3 со скоростью, меньшей скорости самолета. При этом дополнительно на экране на изображении ЛА появляются стрелки радиовертикальной скорости 17, столбик радиовысоты 18, заканчивающийся символом "тень самолета" 16, уменьшается по мере убывания радиовысоты ЛА, а символ "тень самолета" 16 увеличивается в размерах при уменьшении радиовысоты. Летчик, выдерживая точку вектора скорости на прицельной метке посадки, гарантировано приводит самолет в место точного приземления, как он это делает при визуальном пилотировании. На всем этапе захода на посадку и на посадке летчику выдается более наглядно та информация, которая нужна ему на каждом этапе полета.
При выполнении условия "точка в центре квадрата" летчик гарантировано приводит самолет к торцу ВПП на установленной высоте 12-15 м по оси ВПП. С дальности 1 км на изображении ВПП рисуется прицельная метка посадки в виде буквы "Т". Выдерживая центральную точку на перекрестии посадочной метки "Т", летчик гарантировано приводит самолет к земле в месте точного приземления с вертикальной скоростью, обеспечивающей "мягкую" посадку. Так как посадка является одним из наиболее ответственных этапов полета, дополнительно с высоты 30 м дается посадочная информация, включающая шкалу РВ, радиовертикальную скорость, рассогласование между продольной осью самолета и вектором скорости (см. фиг.2).
Для осуществления способа используют бортовую аппаратуру потребителя СНС с дифференциальным режимом (или высокоточный посадочный локатор), бортовую цифровую вычислительную машину БЦВМ, многофункциональный индикатор. Создают новые информационные кадры с применением трехмерного изображения на МФИ, комплексируют вектор скорости угла наклона траектории с углом тангажа. С помощью вычислителя и математических формул преобразуют 3-х мерные объекты внешнего мира на плоский экран. Для примера, рассмотрим преобразование произвольной точки пространства на плоский экран. Необходимые для вывода формул графические построения представлены на фиг.1. Каждая точка координируется относительно неподвижной системы отсчета Xg, Yg, Zg (координаты точки XgT, YgT, ZgT). В этой же системе отсчета определяются координаты ЛА (XgЛА, YgЛА, ZgЛА). Затем координаты точки пересчитываются в земную систему координат с началом координат в центре масс ЛА.
После этого координаты точки пересчитываются в связанную с самолетом систему координат:



где γ - угол крена, ϕ - путевой угол, ϑ - угол тангажа, ϕ - наклона условного вектора скорости к горизонту.
Угол наклона условного вектора скорости к горизонту ϕ определяется комплексированием углов тангажа - ϑ и наклона к горизонту истинного вектора скорости θ в соответствии с выражением:
где θ - угол наклона к горизонту истинного вектора скорости,
ϑ - угол тангажа,
Т - постоянная времени апериодического и изодромного фильтра, Т=2...4 с определяют аэродинамическими характеристиками ЛА.
Теперь необходимо спроецировать эту точку на плоскость экрана, на котором синтезируется изображение внекабинной обстановки. При этом предполагается, что линия визирования взгляда летчика ориентирована по направлению условного вектора скорости, плоскость экрана перпендикулярна этой оси и расположена на расстоянии d от глаз летчика. Тогда проекции точки в экранной системе координат определяются:

Такое преобразование осуществляется для построения на экране индикатора изображения ВПП и прицельной метки и других символов. Поскольку, как известно, по одному вектору скорости пилотировать самолет невозможно из-за возникновения раскачки, при выполнении задачи точного следования по заданной траектории в вычислителе самолета вычисляют значение условного вектора скорости путем фильтрации и суммирования составляющих вектора скорости. Вычисляют угол наклона условного вектора скорости к горизонту в виде суммы сигналов угла наклона истинного вектора скорости, пропущенного через апериодический фильтр и угла тангажа, пропущенного через изодромный фильтр с одинаковыми постоянными времени. При этом комплексирование вектора скорости (угла наклона траектории) с углом тангажа выполнено так что, в короткопериодическом движении в сигнале условного вектора скорости превалирует угол тангажа, а в длинно-периодическом - угол наклона траектории, что исключает необходимость раздельной индикации подвижного вектора скорости углов тангажа. Таким образом, на экране есть один центр пилотирования.
Существенными признаками нового формата является неподвижная центральная точка условного вектора скорости, относительно которой происходит передвижение внешних объектов. Кроме того, в пространстве формируется заданная траектория и прицельная метка. На экране есть один центр пилотирования, и задача летчика сводится к однозначной - выдерживать центральную точку в центре прицельной метки. При выполнении этой задачи с достаточной степенью точности летчик сможет выполнить посадку по приборам вне видимости земли в ручном режиме точно так, как он это делает при визуальном пилотировании.
Предлагаемый способ представления информации может быть успешно применен на всех самолетах, имеющих экранную индикацию, а также на модернизируемых самолетах, которые в процессе доработок оборудуются МФИ.
Данный вид индикации был опробован на пилотажном стенде несколькими летчиками-испытателями, по результатам полетов можно сделать вывод о возможности приборной посадки при отсутствии визуального контакта с ВПП.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| ИНТЕГРАЛЬНЫЙ ПИЛОТАЖНО-НАВИГАЦИОННЫЙ ДИСПЛЕЙ | 1991 |
|
RU2014250C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ЭЛЕКТРОННОЙ ИНДИКАЦИИ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА | 2002 |
|
RU2219108C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2004 |
|
RU2264953C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2020 |
|
RU2778716C2 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| Способ интегрального отображения параметров полётной ситуации | 2019 |
|
RU2722888C1 |
Изобретение относится к области авиации и может быть использовано в приборном оборудовании летательных аппаратов для уменьшения посадочных минимумов и улучшения точности полета по сложным пространственным траекториям. Способ формирования пилотажно-навигационной информации на многофункциональном индикаторе для выполнения посадки заключается в том, что отображения ВПП, земли и линии горизонта проецируют на экран, ось визирования, которого направляют по вектору скорости так, что он является центральной частью экрана, проецируют в центр экрана символ в виде неподвижного силуэта самолета, формируют перемещаемую по заданной траектории с той же скоростью, что и ЛА, находящуюся на заданном расстоянии впереди него в заданном коридоре движения прицельную метку и проецируют ее на экран в виде рамки. Летчик посредством отклонения рычагов корректирует угол наклона условного вектора скорости, значение которого определяется в вычислителе после фильтрации и суммирования сигналов угла тангажа и угла наклона истинного вектора скорости самолета, контролирует и выдерживает центр прицельной метки в центре экрана, при этом фактический вектор скорости направляется в упрежденную точку, движущуюся по траектории посадки, обеспечивая плавный выход самолета на заданную траекторию и последующее движение по расчетной траектории. Технический результат: повышение точности пилотирования при посадке в сложных метеоусловиях, снижение нагрузки на летчика. 1 з.п. ф-лы, 2 ил.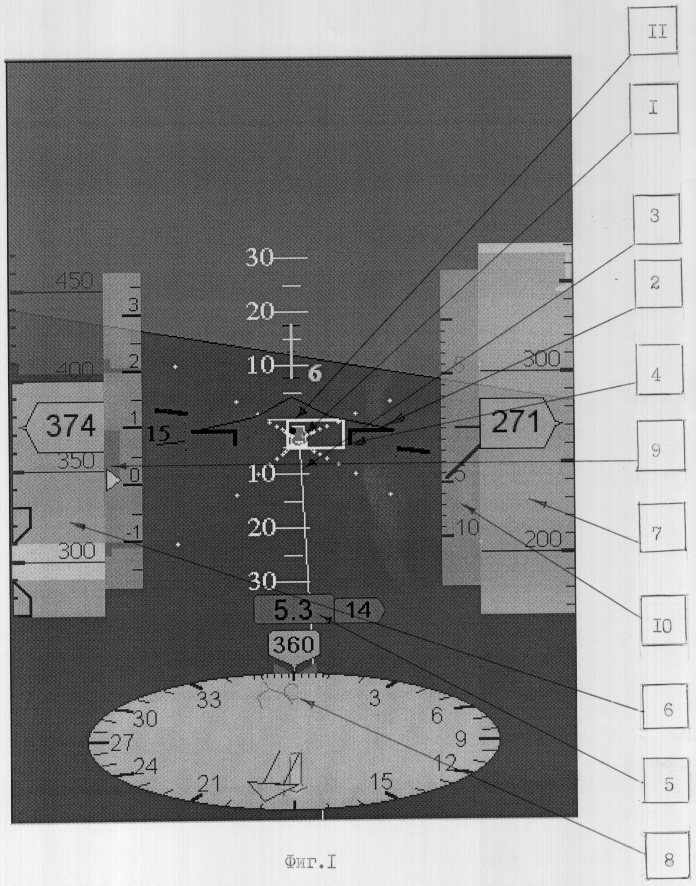
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2002 |
|
RU2207514C1 |
| СПОСОБ ПИЛОТИРОВАНИЯ ЛА ПО ЗАДАВАЕМОЙ ТРАЕКТОРИИ С ЗАДАВАЕМОЙ СКОРОСТЬЮ | 1997 |
|
RU2129699C1 |
| US 6057786 А, 02.05.2000 | |||
| US 6028536 А1, 22.02.2000 | |||
| US 4999780 А1, 12.03.1991. | |||

