Изобретение относится к средствам поиска и обнаружения источников гамма-излучения, и предназначается для оснащения дистанционно управляемых мобильных роботов (МР).
Известен «Дистанционно управляемый робот радиационной разведки» [патент на полезную модель РФ №82871]. Робот содержит антропоморфный шарнирный манипулятор с механическим захватом, на котором установлен коллимированный детектор с двумя каналами. На опорной раме установлен многоэлементный детектор, что позволяет комплексу производить поиск первоначального направления на источник излучения (ИИ). Коллимированный детектор, установленный на захвате манипулятора, повышает точность поиска ИИ.
Поиск ИИ происходит следующим образом. По информации от многоэлементного детектора в микроЭВМ пульта оператора непрерывно строится вектор, определяющий направление на ИИ с максимальной интенсивностью из всех имеющихся в данном пространстве. Для более точного определения расположения ИИ МР передвигают в направлении полученного вектора. В процессе движения непрерывно снимают информацию с многоэлементного детектора. Как только уровень регистрируемого излучения превысит порог обнаружения, определяемый типом счетчиков коллимированного детектора, МР останавливают. Сканирующими движениями по командам с пульта оператора с помощью манипулятора последовательно перемещают коллимированный детектор вверх-вниз и вправо-влево и получают информацию о регистрируемом уровне излучения с каждого канала коллимированного детектора. Сканирующими движениями добиваются выравнивания регистрируемых уровней излучения от ИИ. В момент выравнивания уровней рабочая ось детектора, а следовательно и захватного устройства, будет направлена на искомый ИИ.
Недостатком данного способа является необходимость сканирования пространства манипулятором с установленным на нем коллимированным детектором, что приводит к увеличению времени поиска ИИ. При этом угловая разрешающая способность коллимированного детектора составляет 15 градусов [1]. Если объект излучения содержит несколько фрагментов, такая величина разрешающей способности может привести к ошибкам в определении количества близкорасположенных ИИ, определяя их как одно целое. Кроме этого, оператор должен ориентироваться на показания коллимированного детектора и самостоятельно сопоставлять полученные данные о направлении на ИИ с видеоизображением, полученным с телекамеры, расположенной на манипуляторе. Это может привести к ошибке в определении истинного положения ИИ, если на исследуемой местности находятся другие объекты.
Известен «Способ поиска и обнаружения источников гамма-излучения в условиях неравномерного радиоактивного загрязнения» [патент РФ №2195005], который был выбран за прототип. Способ заключается в регистрации излучения двумя блоками детектирования, размещенными на платформе мобильного робота. Один из блоков является поисковым и состоит из двух детекторов, разделенных экраном. Поисковый блок детектирования располагается на платформе МР таким образом, чтобы ось разделительного экрана совпадала с продольной осью МР. При поиске источника излучения МР двигается в направлении, определенном равноинтенсивными сигналами с обоих детекторов. Второй блок детектирования обнаружительный. Он представляет собой детектор, размещенный на манипуляторе МР. С его помощью регистрируется изменение мощности дозы и определяется точное местоположение источника гамма-излучения. Если оператору не удается установить визуальный контакт с ИИ при помощи видеокамеры, то его местоположение определяется по звуковым сигналам различной тональности в зависимости от изменения мощности дозы. Опуская манипулятор с детектором к исследуемой поверхности, оператор находит, в какой точке происходит изменение тональности звука, определяя местоположение ИИ.
Недостатком такого способа является необходимость сканирования манипулятором МР исследуемой поверхности для определения координат ИИ, что приводит к увеличению времени поиска ИИ. При этом можно отметить невысокую точность и трудоемкость определения координат ИИ, так как оператор в процессе поиска должен сопоставлять звуковую информацию с положением манипулятора. Также может возникнуть ситуация, когда в исследуемом объекте излучения присутствуют нескольких отдельных фрагментов. В этом случае один детектор не позволит различить отдельные источники и будет показывать суммарную мощность дозы от всех ИИ. Это приводит к значительному усложнению процедуры поиска и изъятия ИИ, так как определить координаты отдельных фрагментов в этом случае невозможно.
В настоящее время существует актуальная задача - поиск и обнаружение источников излучения, образующихся в результате радиационных аварий и представляющих собой локальное загрязнение, состоящее из нескольких фрагментов. Существующие технические средства не могут выполнить данную задачу с достаточной эффективностью, так как имеют ряд приведенных выше недостатков. Кроме этого, существующие способы не дают визуального представления информации о положении источников излучения на местности, что усложняет процедуру поиска и изъятия их из окружающей среды.
Технический результат - ведение поиска, обнаружения и определения количества и точного местоположения источников гамма-излучения в обнаруженном локальном загрязнении, содержащем несколько радиоактивных фрагментов, уменьшение времени поиска и повышение точности определения координат отдельных ИИ, удобное визуальное представление информации о положении ИИ на местности для оператора.
Указанный технический результат достигается введением в состав детектирующей аппаратуры дополнительного блока детектирования - гамма-визора - устройства для визуального отображения и определения координат локальных источников гамма-излучения, находящихся в поле зрения прибора. По информации, получаемой с поискового и обнаружительных блоков детектирования, МР перемещают к радиоактивному загрязнению способом, указанным в прототипе. Причем МР выводят непосредственно к загрязнению таким образом, чтобы в поле зрения гамма-визора попадала вся исследуемая область, содержащая источники излучения. На основании информации, поступающей от гамма-визора и представляющей собой совмещенную картину видео- и гамма-изображений исследуемой области, где положение каждого излучающего фрагмента отмечено цветовым пятном, причем цвет пятна зависит от активности источника, проводят операцию изъятия источников из окружающей среды. По гамма-изображению определяют наиболее активный фрагмент и при помощи схвата манипулятора его помещают в контейнер. После изъятия наиболее активного фрагмента при помощи гамма-визора контролируют исследуемую местность на предмет оставшихся ИИ. При наличии ИИ операцию изъятия повторяют до полного отсутствия источников излучения на гамма-изображении.
Таким образом, за один акт измерения, без проведения дополнительного сканирования манипулятором МР, оператор получает всю необходимую информацию о количестве радиоактивных фрагментов в загрязнении и их координатах, что приводит к существенному сокращению времени поиска ИИ. Повышение точности определения координат ИИ реализуется за счет метода отображения локальных фрагментов радиоактивного загрязнения на гамма-изображении, который позволяет определять координаты каждого источника по центру цветового пятна с точностью не более 1 градуса.
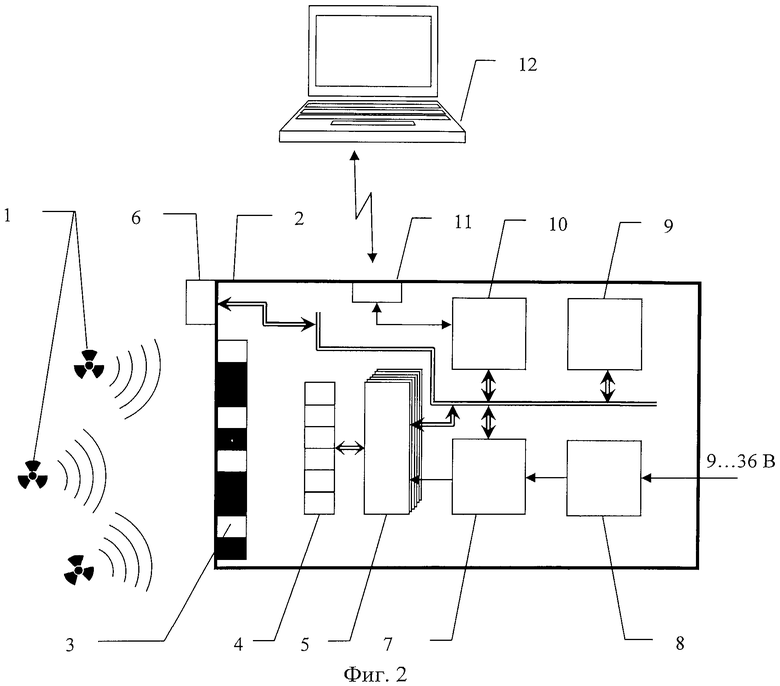
Вариант размещения блоков детектирования на платформе МР представлен на фиг.1, где:
1 - поисковый блок детектирования;
2 - манипулятор;
3 - обнаружительный блок детектирования;
4 - гамма-визор с видеокамерой;
5 - радиоактивное загрязнение, содержащее несколько фрагментов.
Визуализированная информация о положении отдельных ИИ в радиоактивном загрязнении, поступающая от гамма-визора, отображается на дисплее удаленного пульта оператора.
На фиг.2 приведена схема гамма-визора для определения положения источников излучения 1, который содержит защитный корпус 2, кодирующую маску 3, матрицу счетчиков 4, блок контроллеров 5, видеокамеру 6, преобразователь высоковольтный 7, блок аккумуляторов 8, модуль согласования 9, микроЭВМ 10 и модуль Wi-Fi 11. Кодирующая маска 3 имеет прямоугольную форму, состоит из прозрачных и не прозрачных для гамма-излучения элементов, расположенных в определенном порядке, и установлена в передней стенке корпуса 2. Корпус 2 выполнен из материала с большой атомной массой и высокой плотностью (свинец, вольфрам и т.д.) и предназначен для защиты от излучения источников, не попадающих в поле зрения прибора. Матрица счетчиков 4 расположена внутри корпуса 2 напротив кодирующей маски 3, причем центральная ось матрицы 4 совпадает с центральной осью маски 3. Матрица счетчиков 4 имеет прямоугольную форму и представляет собой набор идентичных линеек, на которых в качестве элементов, чувствительных к гамма-излучению, установлены счетчики Гейгера-Мюллера по равному количеству счетчиков в каждой линейке. Матрица счетчиков 4 связана с блоком контроллеров 5, который содержит набор идентичных контроллеров, количество которых равно количеству линеек матрицы, и каждый контроллер связан с соответствующей линейкой матрицы. Вход блока контроллеров 5 подключен к выходу преобразователя высоковольтного 7. Выход блока контроллеров 5 подключен на внутрисистемную CAN-магистраль, к которой также подключены видеокамера 6, преобразователь высоковольтный 7, модуль согласования 9 и микроЭВМ 10. Входы преобразователя высоковольтного 7 связаны с выходом блока аккумуляторов 8. Модуль согласования 9 служит для организации электрических связей между видеокамерой 6, микроЭВМ 10 и преобразователем высоковольтным 7. Вход модуля Wi-Fi 11 связан с выходом микроЭВМ 10. Питание модулей устройства осуществляется через блок аккумуляторов 8 либо от бортовой сети МР (напряжением от 9 до 36 В), либо от внутренней батареи блока аккумуляторов 8: через модуль согласования 9 для питания видеокамеры 7, микроЭВМ 10, и через преобразователь высоковольтный 7 для питания счетчиков матрицы 4.
Потоки гамма-квантов от источников излучения 1 проходят через кодирующую маску 3 и образовывают, в зависимости от направления прихода гамма-излучения, суперпозицию уникальных пространственных распределений тени маски в плоскости позиционно-чувствительного детектора, в роли которого выступает матрица счетчиков 4. Такая суперпозиция теней кодирующей маски регистрируется на счетчиках матрицы 4 в виде распределения электрических сигналов, которое затем поступает на микроЭВМ 10 для декодирования и построения гамма-изображения. Полученная картина гамма-поля, содержащая изображения источников излучения, совмещается в микроЭВМ 10 с видео-изображением исследуемого участка местности, поступающим с видеокамеры 6, и передается через модуль WiFi 11 на пульт оператора 12 для отображения на дисплее. Такая совмещенная картина позволяет сделать однозначный вывод о количестве радиоактивных фрагментов в загрязнении и определить координаты каждого фрагмента за один акт измерения.
Пример определения координат ИИ в радиоактивном загрязнении. После вывода МР непосредственно к обнаруженному радиоактивному загрязнению, содержащему несколько ИИ, оператор ориентирует МР таким образом, чтобы в поле зрения гамма-визора располагался исследуемый участок местности, содержащий источники гамма-излучения. На пульт оператора от гамма-визора поступает совмещенное видео- и гамма-изображение участка. По гамма-изображению оператор определяет наиболее активный ИИ из присутствующих, а по видео-изображению - положение данного источника на местности. После этого производится захват выбранного ИИ охватом манипулятора МР и погрузка ИИ в контейнер. Затем оператор при помощи гамма-визора контролирует исследуемую местность на предмет присутствия ИИ. При наличии ИИ на гамма-изображении процедура определения и изъятия наиболее активного фрагмента в загрязнении повторяется до полного отсутствия ИИ на гамма-изображении.
Поле зрения гамма-визора предложенной конструкции составляет 30х20 градусов, при этом угловое разрешение двух близкорасположенных ИИ составляет не более 5 градусов. Таким образом, гамма-визор может визуализировать не менее 15 локальных ИИ равной активности, равномерно расположенных в поле зрения прибора.
Дополнительным преимуществом является применение в качестве детектирующих элементов счетчиков Гейгера-Мюллера, что позволяет работать в сильных полях ионизирующего излучения и проводить измерения при значениях мощности дозы до 1 Зв/ч (при использовании импульсной схемы питания счетчиков).
Источник информации
1. Власенко А.Н., Демченков В.П., Герман С.Л. и др. Малогабаритная измерительная аппаратура мобильного робота-разведчика для поиска и изъятия гамма-источников из окружающей среды. / Тезисы докладов научно-технической конференции «Мониторинг и прогнозирование чрезвычайных ситуаций». - Санкт-Петербург, 24-25 ноября 1999. - с.73.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ГАММА-ИЗЛУЧЕНИЯ В УСЛОВИЯХ НЕРАВНОМЕРНОГО РАДИОАКТИВНОГО ЗАГРЯЗНЕНИЯ | 2000 |
|
RU2195005C2 |
| Роботизированный поиск источников ионизирующего излучения на местности | 2023 |
|
RU2836638C1 |
| Способ определения местоположения точечного источника гамма-излучения на местности | 2019 |
|
RU2698496C1 |
| Способ определения местоположения и активности точечных источников гамма-излучения на местности | 2024 |
|
RU2838014C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ИСТОЧНИКА ГАММА-ИЗЛУЧЕНИЯ | 2017 |
|
RU2645770C1 |
| Способ определения местоположения точечного источника гамма-излучения на местности | 2015 |
|
RU2620449C2 |
| УСТРОЙСТВО С ПОЛУСФЕРИЧЕСКОЙ ЗОНОЙ ОБЗОРА ДЛЯ ПОИСКА ИСТОЧНИКОВ ФОТОННОГО ИЗЛУЧЕНИЯ | 2019 |
|
RU2700365C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ГАММА-ИЗЛУЧЕНИЯ В УСЛОВИЯХ НЕРАВНОМЕРНОГО РАДИОАКТИВНОГО ЗАГРЯЗНЕНИЯ | 2016 |
|
RU2640311C1 |
| УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ НАВИГАЦИИ РОБОТА В ПОЛЯХ ГАММА-ИЗЛУЧЕНИЯ | 2009 |
|
RU2390799C1 |
| Способ автоматического определения местоположения точечного источника гамма-излучения на местности | 2016 |
|
RU2620451C1 |
Изобретение относится к средствам поиска и обнаружения источников гамма-излучения и предназначается для оснащения дистанционно управляемых мобильных роботов. Способ поиска и обнаружения источников гамма-излучения в условиях неравномерного радиоактивного загрязнения, заключающийся в регистрации излучения несколькими детекторами, расположенными на платформе мобильного робота, при этом для определения количества и местоположения фрагментов в обнаруженном радиоактивном загрязнении при помощи гамма-визора получают совмещенную картину видео- и гамма-изображений исследуемой области, содержащей источники излучения, где положение каждого излучающего фрагмента на гамма-изображении отмечено цветовым пятном, причем цвет пятна зависит от активности источника, по гамма-изображению определяют наиболее активный источник излучения, проводят операцию изъятия данного источника из окружающей среды, контролируют исследуемую местность на предмет оставшихся источников и повторяют операцию изъятия до полного отсутствия источников излучения. Технический результат - уменьшение времени поиска, повышение точности определения координат источников излучения. 2 ил.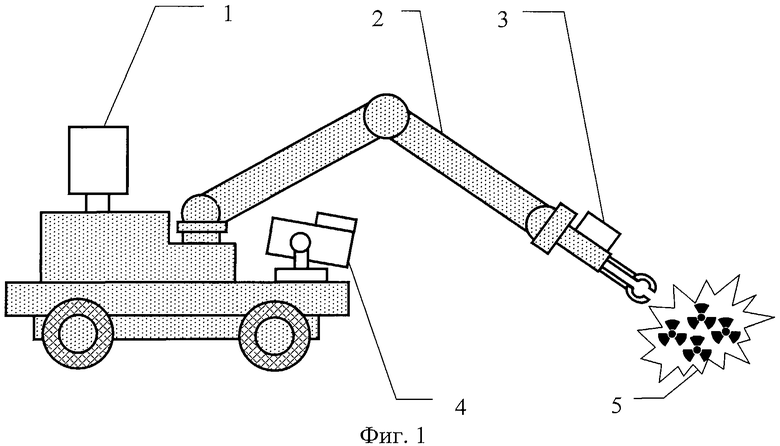
Способ поиска и обнаружения источников гамма-излучения в условиях неравномерного радиоактивного загрязнения, заключающийся в регистрации излучения несколькими детекторами, расположенными на платформе мобильного робота, отличающийся тем, что для определения количества и местоположения фрагментов в обнаруженном радиоактивном загрязнении при помощи гамма-визора получают совмещенную картину видео- и гамма-изображений исследуемой области, содержащей источники излучения, где положение каждого излучающего фрагмента на гамма-изображении отмечено цветовым пятном, причем цвет пятна зависит от активности источника, по гамма-изображению определяют наиболее активный источник излучения, проводят операцию изъятия данного источника из окружающей среды, контролируют исследуемую местность на предмет оставшихся источников и повторяют операцию изъятия до полного отсутствия источников излучения.
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ГАММА-ИЗЛУЧЕНИЯ В УСЛОВИЯХ НЕРАВНОМЕРНОГО РАДИОАКТИВНОГО ЗАГРЯЗНЕНИЯ | 2000 |
|
RU2195005C2 |
| ЕА 200701851 A1, 28.02.2008 | |||
| УСОВЕРШЕНСТВОВАННЫЙ ПРИБОР ДЛЯ ПОЛУЧЕНИЯ ГАММА-ИЗОБРАЖЕНИЙ | 2005 |
|
RU2399929C2 |
| US 7205544 B2, 17.04.2007. | |||

