Изобретение относится к области выявления радиационной обстановки, а именно к способам поиска и обнаружения источников ионизирующего излучения (ИИИ), и предназначается для поиска точечных источников гамма-излучения.
Поиск источников гамма-излучения является одной из важных задач в рамках мероприятий радиоэкологического мониторинга. Такие источники могут представлять собой фрагменты разрушенных конструкционных элементов ядерных реакторов, хранилищ радиоактивных отходов и других объектов атомной промышленности, несгоревшие обломки выведенных с орбиты искусственных спутников Земли, оборудованных бортовыми ядерными энергетическими установками, источники закрытого типа, широко используемые в различных отраслях промышленности и приборостроения, и другие радионуклидные источники. Все эти радиоактивные объекты как в мирное, так и в военное время могут появиться в сфере жизнедеятельности человека и обусловить серьезную опасность для жизни и здоровья как личного состава Вооруженных Сил Российской Федерации (ВС РФ), так и населения.
Особо следует отметить, что в современных условиях не исключена возможность преднамеренного применения радионуклидных источников в террористических целях, в частности при проведении различного рода международных форумов и спортивных мероприятий. В этих условиях приобретает безусловную значимость возможность локализации опасного объекта не только сотрудниками специализированных подразделений ВС РФ, но и в случае необходимости сотрудниками подразделений ФСО, ФСБ, МВД и МЧС.
В настоящее время для решения задач поиска и обнаружения источников гамма-излучения существует комплекс радиационной разведки и поиска ИИИ (КРПИ), включающий в себя аппаратуру воздушной и наземной радиационной разведки, которая монтируется на базе вертолета Ми-8 и БТР-80 [1]. Комплекс эффективен для поиска высокоактивных ИИИ на большой по площади территории. Основной недостаток поиска источников гамма-излучения с применением вертолета Ми-8 заключается в том, что технические характеристики вертолета не позволяют осуществлять измерение мощности дозы в полете на малой высоте, при этом аппаратура воздушной радиационной разведки не чувствительна к малоактивным ИИИ при измерениях на большой высоте. Помимо этого существенным недостатком комплекса является высокая стоимость и большие массогабаритные характеристики.
Для поиска источников гамма-излучения предназначен также измеритель мощности дозы ИМД-24. Прибор устанавливают на борт подвижных технических средств, используемых для радиационной разведки, поиска и обнаружения источников гамма-излучения. В качестве детекторов ионизирующего излучения (ИИ) используются газоразрядные счетчики типа СБМ21 (28 шт.), СБМ20 (24 шт.), СИ38Г (4 шт.) и СИ29БГ (6 шт.) [2].
Такое большое количество детекторов влечет за собой увеличение массогабаритных характеристик прибора и создает определенную трудность его технического обслуживания, а также усложняет процесс обработки информации, поступающей с каждого детектора. Метрологическое обеспечение такого сложного прибора требует также больших затрат. Прибор обеспечивает только лишь определение направления на источник гамма-излучения, а процесс определения его местонахождения требует применения специальных методик. Помимо этого поиск источников гамма-излучения с применением данного прибора на специальных средствах подвижности невозможен в условиях сложного рельефа местности (ущелья, теснины, крутые склоны гор, лесистая и лесисто-болотистая местность, производственные площадки и т.п.), а также в неблагоприятных климатических условиях, например, при наличии мощного снежного покрова. Кроме того, применение специальных средств подвижности делает процесс поиска дорогостоящим из-за возникающих эксплуатационных затрат.
В качестве прототипа был выбран способ поиска и обнаружения источников гамма-излучения в условиях неравномерного радиоактивного загрязнения. Способ заключается в регистрации гамма-излучения тремя детекторами, размещенными на платформе мобильного робота (MP). Один из блоков детектирования является поисковым и состоит из двух детекторов, разделенных экраном. Блок детектирования располагают на платформе MP таким образом, чтобы ось разделительного экрана совпадала с продольной осью MP. При поиске ИИИ MP двигается в направлении, определенном равноинтенсивными сигналами с обоих детекторов. Второй блок детектирования обнаружительный. Он представляет собой детектор, размещенный на манипуляторе MP. С его помощью регистрируется изменение мощности дозы и определяется примерное местоположение источника гамма-излучения [3].
К недостаткам способа-прототипа можно отнести следующее.
При нахождении ИИИ сзади по курсу, MP будет продолжать движение прямо до тех пор, пока в результате каких-либо причин не произойдет некоторая смена курса, после чего начнут подаваться команды на разворот MP. Кроме того, из-за статистической неравномерности скорости счета фотонов гамма-излучения, детекторы практически постоянно будут регистрировать различное количество импульсов. В результате этого будут подаваться частые сигналы на смену курса, что приведет к тому, что движение MP будет осуществляться рывками из стороны в сторону. Помимо этого, в случае нахождения MP в поле ионизирующего излучения (ИИ), создаваемом двумя источниками гамма-излучения, существует вероятность попадания условно одинакового количества квантов в боковые детекторы. В этом случае MP пройдет мимо двух ИИИ без их обнаружения. Кроме того, на движение MP будет существенно влиять рельеф местности, а крупные складки местности и овраги могут полностью воспрепятствовать движению.
Технический результат, достигаемый в заявленном изобретении, заключается в том, что определение местоположения точечного источника гамма-излучения осуществляется в автоматическом режиме.
Указанный технический результат достигается тем, что блок детектирования содержит один фронтальный 3 и два боковых детектора 2, расположенных вокруг цилиндрического экрана 1, и установлен на борту беспилотного летательного аппарата (БПЛА) вертолетного типа. Схема расположения детекторов вокруг экрана показана на фигуре 1. Экран выполнен из материала с высокой плотностью (например, свинца) и частично ослабляет излучение, попадающее в два боковых детектора. Фронтальный детектор устанавливают перед экраном и регистрируют прямое излучение без ослабления.
Для определения оптимального расположения боковых детекторов относительно экрана были рассчитаны коэффициенты ослабления К гамма-излучения экраном в зависимости от различной степени затененности детектора по формуле

где μ - линейный коэффициент ослабления излучения материалом экрана, см-1;
R1 - радиус экрана, см;
R2 - радиус детектора, см;
y - ширина затененной экраном части детектора, см.
В случае, когда детектор полностью затенен экраном, кратность ослабления определяют по формуле

где xi - абсцисса хорды сегмента экрана, который закрывает детектор.
Ширину затененной экраном части детектора определяют с помощью геометрического построения, показанного на фигуре 2, по формуле

где θ - угол между направлением ионизирующего излучения и линией, соединяющей центры экрана и детектора.
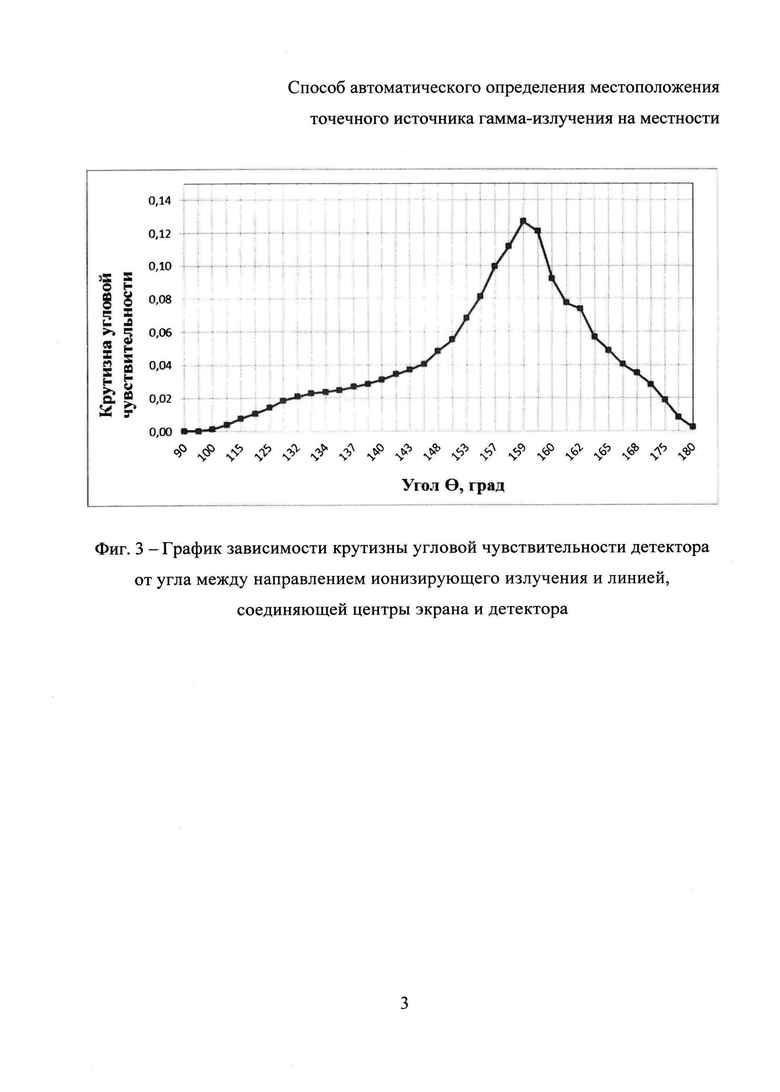
По полученным результатам кратностей ослабления строят график зависимости крутизны угловой чувствительности детектора η от угла между направлением ИИ 4 и линией, соединяющей центры экрана и детектора. Крутизну угловой чувствительности детектора определяют по формуле

где Ni - количество гамма-квантов, зарегистрированных детектором, когда угол между направлением ионизирующего излучения и линией, соединяющей центры экрана и детектора, равен θi;
Nj - количество гамма-квантов, зарегистрированных детектором, когда угол между направлением ионизирующего излучения и линией, соединяющей центры экрана и детектора, равен θi+Δθ;
Δθ - приращение угла между направлением ионизирующего излучения и линией, соединяющей центры экрана и детектора.
Для расчетов в качестве примера были использованы:
- экран из свинца радиусом R1=1,05 см;
- детектор (газоразрядный счетчик СБМ-20) радиусом R2=0,5 см;
- максимальное количество гамма-квантов, зарегистрированных открытым детектором N=100;
- углы между направлением ИИ и линией, соединяющей центры экрана и детектора от 90 до 180 градусов включительно.
График зависимости крутизны угловой чувствительности детектора от угла между направлением ИИ и линией, соединяющей центры экрана и детектора для указанного примера, показан на фигуре 3.
Из анализа данных, представленных на фигуре 3, следует, что крутизна угловой чувствительности имеет максимальное значение при угле между направлением ИИ и линией, соединяющей центры экрана и детектора, равном 159°. Этот угол соответствует случаю, когда детектор полностью затенен экраном. Таким образом, показано, что расстояние между внешними краями двух боковых детекторов соответствует диаметру экрана.
Использование цилиндрического экрана и расположенных вокруг него детекторов при измерении с борта БПЛА вертолетного типа обеспечивает достижения нового результата - определение точки расположения источника гамма-излучения и возможность работы в условиях наличия нескольких источников излучения. Это связано с наличием осевой симметрии детекторной системы, благодаря которой при расположении источника гамма-излучения вблизи оси симметрии все детекторы дают одинаковый отклик. Получение одинакового отклика связано с тем, что поле гамма-излучения точечного источника, расположенного на поверхности Земли, также имеет осевую симметрию. Таким образом, детекторная схема позволяет реализовать, в отличие от существующих, двухступенчатую систему сравнения скоростей счета гамма-квантов детекторов. На первой ступени сравнивают скорости счета боковых детекторов и устанавливают направление на источник гамма-излучения. На второй ступени одинаковые показания скоростей счета боковых детекторов сравнивают со скоростью счета фронтального детектора.
Автоматический принцип поиска ИИИ заключается в следующем.
БПЛА осуществляет вертикальный взлет с «чистой» местности с зависанием на заданной высоте для измерения радиационного фона в автоматическом режиме с помощью трех детекторов за установленное время. Высота полета БПЛА выбирается оптимальной между минимальным значением, указанным в технических характеристиках БПЛА, и реальными условиями местности для наиболее эффективного поиска источников гамма-излучения. После набора фоновых значений БПЛА осуществляет сканирование местности параллельными галсами по заданному маршруту. Переключение в автоматический режим поиска осуществляют после обнаружения превышения радиационного фона для данной местности. Для этого определяют факт превышения скорости счета хотя бы одного детектора на величину трех среднеквадратических отклонений (СКО), характеризующих статистическую погрешность измерения, что соответствует попаданию БПЛА в поле источника гамма-излучения с вероятностью 99,73%. СКО определяют по формуле

где ni - скорость счета i-ого детектора, имп./с.
Направление на источник гамма-излучения считают истинным при совпадении скоростей счета боковых детекторов с точностью до СКО, характеризующего статистическую погрешность измерения. При превышении скорости счета импульсов от фронтального детектора относительно скоростей счета боковых детекторов начинают движение к точечному источнику гамма-излучения, в противном случае перед началом движения БПЛА совершает поворот на 180°.
Движение БПЛА может осуществляться в одном из трех режимов, в зависимости от показаний трех детекторов.
1 режим - полет вперед.
Включение первого режима происходит, когда скорость счета гамма-квантов фронтального детектора больше, чем у каждого из боковых на величину, превышающую значение СКО, а скорости счета боковых детекторов различаются между собой менее чем на величину СКО.
2 режим - корректировка направления движения при продолжении полета вперед.
Управляющий сигнал на корректировку направления полета БПЛА подают при разности зарегистрированных импульсов от боковых детекторов, превышающей величину СКО наиболее открытого к излучению детектора. При этом количество импульсов, зарегистрированных каждым из двух боковых детекторов, меньше количества импульсов, зарегистрированных фронтальным детектором на величину, превышающую значение СКО.
3 режим - вертикальный спуск.
При совпадении скоростей счета всех трех детекторов с точностью до СКО осуществляют вертикальный спуск.
Абсолютные значения скоростей счета каждого детектора в случае нахождения точечного источника гамма-излучения под БПЛА увеличиваются по закону обратных квадратов расстояний по формуле

где h - высота зависания беспилотного летательного аппарата над источником гамма-излучения, м;
kh - высота зависания беспилотного летательного аппарата над источником гамма-излучения после спуска на расстояние k, м;
ni - скорость счета i-ого детектора на высоте h, имп./с;
kni - скорость счета i-ого детектора на высоте kh, имп./с.
При несоблюдении указанного закона делают вывод о наличии нескольких источников гамма-излучения, расположенных на удалении от точки проекции БПЛА на земную поверхность. В этом случае скорости счета на разных высотах будут удовлетворять соотношению

где r - расстояние между точкой проекции беспилотного летательного аппарата на земную поверхность и местоположением источника гамма-излучения, м.
В качестве примера были рассчитаны скорости счета детектора в зависимости от высоты измерения для случаев, когда БПЛА находится над источником гамма-излучения и когда источник гамма-излучения находится на удалении от точки проекции БПЛА на земную поверхность. Исходные данные и результаты расчетов приведены в таблице.
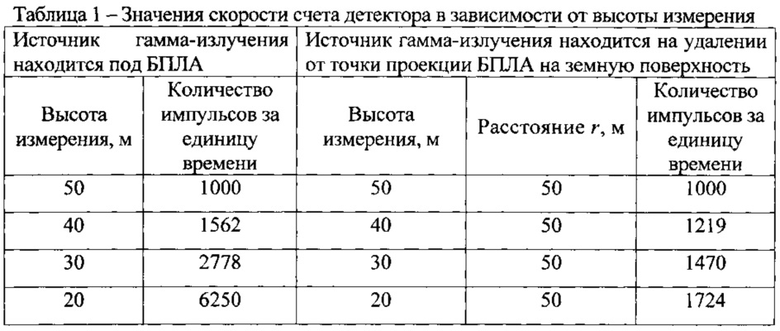
Таким образом, при возрастании скоростей счета с трех детекторов обратно пропорционально квадрату высоты измерения делают вывод о нахождении источника гамма-излучения под летательным аппаратом, при меньшей зависимости скоростей счета с трех детекторов от высоты делают вывод о наличии нескольких источников и осуществляют полет по расширяющейся спирали до возникновения разности скоростей счета детекторов, после чего осуществляют повторное переключение в автоматический режим поиска.
В случае нахождения БПЛА над источником гамма-излучения передают его координаты на пункт управления, где проекция данной точки пространства отмечается на карте в режиме реального времени.
Для исключения ситуации, когда БПЛА по каким-либо причинам попал в «чистую» зону, осуществляют сравнение скоростей счета с фоновым значением после каждого цикла измерений.
Предлагаемое техническое решение позволяет осуществлять оперативный поиск точечного источника гамма-излучения в автоматическом режиме с использованием БПЛА вертолетного типа на большой по площади территории с относительно невысокими материальными затратами.
ЛИТЕРАТУРа
1. Министерство обороны РФ. Приказ №569. О принятии на снабжение ВС РФ комплекса радиационной разведки и поиска источников ионизирующего излучения КРПИ [Текст]: приказ утвержден первым заместителем МО РФ 1 декабря 2000 года. - М.: МО РФ, 2000. - 3 с.
2. Измеритель мощности дозы и дифференциальных потоков гамма-излучения ИМД-24. Руководство по эксплуатации Т71.570.063 РЭ [Текст]: 2006 г. - 136 с.
3. Пат. 2195005 Российская Федерация, МПК G01T 1/169. Способ поиска и обнаружения источников гамма-излучения в условиях неравномерного радиоактивного загрязнения [Текст] / Соловых С.Н., Алимов Н.И., Перевозчиков А.Н., Глухов Ю.А., Андриевский Э.Ф. Заявитель и патентообладатель воинская часть 61469 / публикация патента 29.12.2002 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения местоположения точечного источника гамма-излучения на местности | 2015 |
|
RU2620449C2 |
| БЛОК ДЕТЕКТИРОВАНИЯ ГАММА-ИЗЛУЧЕНИЯ В СОСТАВЕ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ЛЕГКОГО КЛАССА | 2013 |
|
RU2565335C2 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| Способ ведения воздушной радиационной разведки местности с использованием беспилотного летательного аппарата вертолетного типа | 2016 |
|
RU2620333C1 |
| Роботизированный поиск источников ионизирующего излучения на местности | 2023 |
|
RU2836638C1 |
| Способ определения местоположения и активности точечных источников гамма-излучения на местности | 2024 |
|
RU2838014C1 |
| СПОСОБ АЭРОГАММАСПЕКТРОМЕТРИЧЕСКОЙ СЪЕМКИ ГЕОЛОГИЧЕСКОГО НАЗНАЧЕНИЯ | 2017 |
|
RU2673505C1 |
| Способ определения дисперсного состава альфа-активных примесей при аварийном выбросе в атмосферу | 2021 |
|
RU2777752C1 |
| Способ определения параметров аварийного радиационного источника по данным воздушной радиационной разведки местности | 2021 |
|
RU2755604C1 |
| Способ повышения достоверности воздушной радиационной разведки радиоактивно загрязненной местности | 2019 |
|
RU2698499C1 |


Изобретение относится к области выявления радиационной обстановки. Сущность изобретения заключается в том, что способ автоматического определения местоположения точечного источника гамма-излучения на местности содержит этапы, на которых с помощью блока детектирования, расположенного на борту беспилотного летательного аппарата вертолетного типа, сравнивают скорости счета боковых детекторов и устанавливают направление на источник гамма-излучения. Далее одинаковые показания скоростей счета боковых детекторов сравнивают со скоростью счета фронтального детектора. При совпадении скоростей счета всех трех детекторов осуществляют вертикальный спуск. При возрастании скоростей счета с трех детекторов обратно пропорционально квадрату высоты измерения делают вывод о нахождении источника гамма-излучения под летательным аппаратом, при меньшей зависимости скоростей счета с трех детекторов от высоты делают вывод о наличии нескольких источников и осуществляют полет по расширяющейся спирали до возникновения разности скоростей счета детекторов, после чего осуществляют повторное переключение в автоматический режим поиска. В случае нахождения БПЛА над источником гамма-излучения передают его координаты на пункт управления, где проекция данной точки пространства отмечается на карте в режиме реального времени. Технический результат – оперативный поиск точечного источника гамма-излучения в автоматическом режиме с использованием БПЛА вертолетного типа на большой по площади территории. 3 ил., 1 табл.
Способ автоматического определения местоположения точечного источника гамма-излучения на местности, заключающийся в том, что корректировку направления на источник гамма-излучения осуществляют на основе сравнения скоростей счета импульсов нескольких детекторов, разделенных экраном, отличающийся тем, что блок детектирования содержит один фронтальный и два боковых детектора, расположенных вокруг цилиндрического экрана, и установлен на борту беспилотного летательного аппарата вертолетного типа, причем расстояние между внешними краями двух боковых детекторов соответствует диаметру экрана; переключение в автоматический режим поиска осуществляют после обнаружения превышения радиационного фона для данной местности; направление на источник гамма-излучения считают истинным при совпадении скоростей счета боковых детекторов с точностью до среднеквадратического отклонения, характеризующего статистическую погрешность измерения; при превышении скорости счета импульсов от фронтального детектора относительно скоростей счета боковых детекторов начинают движение к точечному источнику гамма-излучения, в противном случае перед началом движения беспилотный летательный аппарат совершает поворот на 180°; при совпадении скоростей счета всех трех детекторов с точностью до среднеквадратического отклонения осуществляют вертикальный спуск, при возрастании скоростей счета с трех детекторов обратно пропорционально квадрату высоты измерения делают вывод о нахождении источника гамма-излучения под летательным аппаратом, при меньшей зависимости скоростей счета с трех детекторов от высоты делают вывод о наличии нескольких источников и осуществляют полет по расширяющейся спирали до возникновения разности скоростей счета детекторов, после чего осуществляют повторное переключение в автоматический режим поиска.
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ РАДИОНУКЛИДОВ В ВОЗДУШНОМ ВЫБРОСЕ РАДИАЦИОННО-ОПАСНЫХ ПРЕДПРИЯТИЙ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2299451C1 |
| МАШИНА ДЛЯ ШЕЛУШЕНИЯ ЗЕРНА | 2012 |
|
RU2511754C1 |
| RU 2007119006 A, 27.11.2008 | |||
| US 20150276627 A1, 01.10.2015. | |||

