Изобретение относится к области ядерного приборостроения и может быть использовано при радиационном мониторинге в качестве средства поиска и дистанционного определения координат источника гамма-излучения.
Известен «Способ поиска и обнаружения источников гамма-излучения в условиях неравномерного радиоактивного загрязнения» [Патент РФ №2195005], в котором излучение регистрируется системой детекторов, размещенной на платформе мобильного робота (MP). Один из блоков детектирования является поисковым и состоит из двух детекторов, разделенных экраном. Блок детектирования располагается на платформе MP таким образом, чтобы ось разделительного экрана совпадала с продольной осью MP. При поиске источника излучения MP двигается в направлении, определенном равноинтенсивными сигналами с обоих детекторов. Второй блок детектирования - обнаружительный. Он представляет собой детектор, расположенный на манипуляторе MP. С его помощью регистрируется изменение мощности дозы и определяется точное местоположение источника гамма-излучения. Недостатком такого способа является необходимость постоянного корректирования курса MP, длительное время определения источника излучения, координаты источника определяются в непосредственной близости от него.
Наиболее близким техническим решением, принятым за прототип, является система «Обнаружения и отслеживания источников радиации при помощи беспроводной коммуникационной системы с возможностью локализации по GPS» [Патент США №US 2006097171 (A1)]. Детектор ядерного излучения, встроенный в мобильное персональное устройство (например, сотовый или спутниковый телефоны, пейджер, коммуникатор), позволяет сформировать сеть портативных радиационных датчиков, по совместным данным от которых имеется возможность определить положение источника излучения. Сигнал о наличии повышенного уровня радиации вместе с GPS-координатами сработавшего датчика, определяемыми при помощи встроенного GPS-модуля, через систему сотовой связи поступает на центральный компьютер, предназначенный для сбора данных. При наличии нескольких сработавших датчиков вблизи предполагаемого источника излучения появляется возможность определения координат источника методом триангуляции.
Недостатками данного способа является низкая обнаружительная способность (для детектирования излучения предполагается использовать единичный счетчик Гейгера-Мюллера), относительно большая погрешность определения координат GPS-приемниками, а также отсутствие упорядоченного систематического выбора точек измерения вследствие случайного расположения сработавших датчиков.
Техническим результатом предлагаемого изобретения является повышение обнаружительной способности и точности дистанционного определения координат источника гамма-излучения.
Для решения поставленной задачи предложено устройство для осуществления навигации робота в полях гамма-излучения, содержащее устройство для поиска фотонных источников [Патент РФ №2217776], представляющее собой многоэлементный азимутальный угломер-обнаружитель, одометр, бесплатформенную инерциальную навигационную систему (БИНС), GPS-модуль и бортовой процессор. Схема устройства представлена на фиг.1. Данное устройство устанавливается на мобильный робототехнический комплекс, что позволяет уменьшить дозовую нагрузку на персонал при поиске источника излучения и выбирать оптимальные позиции для измерений с учетом рельефа местности, задавая маршрут перемещения робота.
Многоэлементный азимутальный угломер-обнаружитель позволяет не только обнаруживать источник излучения и измерять мощность дозы гамма-излучения, но и определять направление на обнаруженный источник относительно продольной оси робота. БИНС состоит из 3-х микрогироскопов и 3-х микроакселераторов и позволяет определять направление вектора скорости робота в каждый момент времени. Одометр позволяет получать информацию о вращении колес робота, по которой определяется суммарный пройденный путь. GPS-модуль обеспечивает привязку к карте местности. Все элементы устройства связаны между собой через бортовой процессор.
Существенным является комплексирование всех элементов устройства с целью определения координаты источника гамма-излучения с высокой точностью триангуляционным методом.
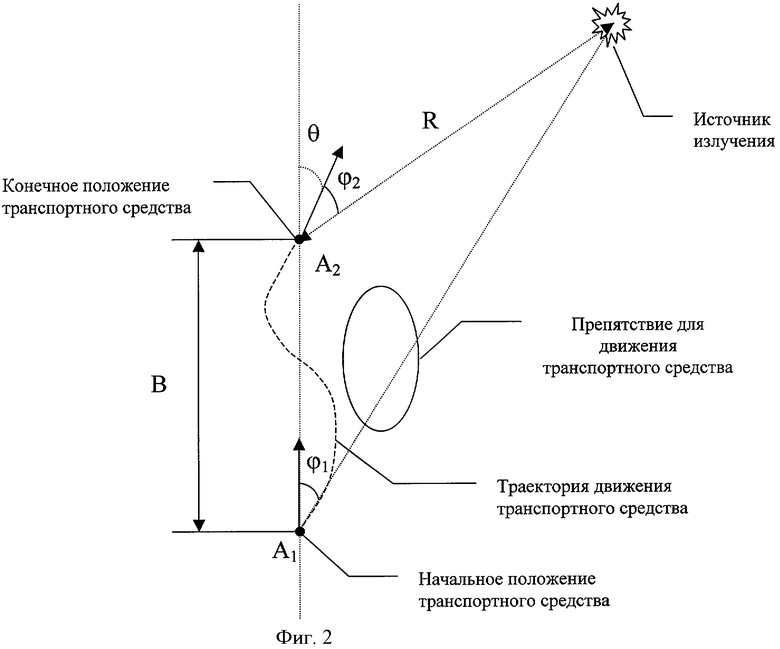
Применение устройства для поиска фотонных источников позволит определять координаты источника с высокой точностью всего по двум измерениям (см. фиг.2). После того как произошло обнаружение источника в точке A1, азимутальный угломер-обнаружитель определяет направление на источник относительно продольной оси транспортного средства - φ1. Далее транспортное средство перемещается в точку A2 и повторно определяется направление на источник - φ2. Расположение точки A2 выбирается с учетом рельефа местности по направлению φ1 к обнаруженному источнику излучения с целью увеличения статистической значимости регистрируемого сигнала. Расстояние до источника R, отсчитываемое от точки A2, определяется по следующей формуле:

где φ1 и φ2 - направление на источник, измеренное в точках A1 и A2 соответственно. Величина B определяется как кратчайшее расстояние между двумя точками, в которых производилось измерение направления на источник.
При помощи вычисленного расстояния R и измеренного значения угла φ2, на основании координат, получаемых от GPS-модуля и БИНС, можно определить координаты источника на карте местности. Причем комплексирование данных элементов устройства позволяет улучшить точность определения координат в 3 раза на расстояниях порядка нескольких десятков метров относительно использования отдельного GPS-модуля.
При движении мобильного транспортного средства из точки A1 в точку A2 может возникнуть ситуация, когда прямолинейная траектория движения невозможна по причине сложного рельефа местности (см. фиг.2). Соответственно, направление продольной оси транспортного средства, от которой отсчитывается направление на источник, по прибытии в точку A2 может отличаться от первоначального направления в точке A1 на некоторый угол θ. Использование информации, полученной от БИНС, позволяет учитывать данное смещение и вводить поправку для корректного определения направления на источник излучения.
Относительная погрешность определения расстояния R до источника определяется следующим образом:

где Δφ1 и Δφ2 - абсолютные погрешности углов φ1 и φ2 в радианах,
δB - относительная погрешность базы B.
Таким образом, из формулы (2) следует, что одним из способов уменьшения погрешности определения расстояния R и, как следствие, повышения точности определения координат источника является уменьшение погрешности определения величины B.
В предлагаемом устройстве измерение величины B производится комплексированием показаний БИНС и одометра. Такой способ приводит к уменьшению погрешности определения величины В относительно использования отдельного GPS-модуля для получения координат начальной и конечной точек.
Повышение обнаружительной способности достигается за счет большего числа детектирующих элементов в азимутальном угломере-обнаружителе по сравнению с прототипом, где для регистрации излучения используется единичный детектор. Известно, что обнаружение источника происходит при выполнении следующего неравенства [Патент РФ №2192656]:

где Nc - суммарное зарегистрированное количество импульсов от источника, Nф - суммарное зарегистрированное количество импульсов фонового излучения, k - коэффициент (квантиль обнаружения). Если устройство содержит n детекторов, то значение величины импульсов сигнала и фона можно записать в виде:

где  ,
,  - среднее зарегистрированное количество импульсов сигнала и фонового излучения для одного элемента. Подставляя выражения (4) в формулу (3), получаем:
- среднее зарегистрированное количество импульсов сигнала и фонового излучения для одного элемента. Подставляя выражения (4) в формулу (3), получаем:

Таким образом, увеличение количества детектирующих элементов в устройстве приводит к выигрышу в чувствительности в корень квадратный раз из числа элементов по сравнению с чувствительностью устройства, содержащего один детектор.
Дополнительным преимуществом использования БИНС является возможность, в случае потере связи с мобильным робототехническим комплексом, его возвращения в точку старта по запомненному маршруту в автоматическом режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения местоположения точечного источника гамма-излучения на местности | 2019 |
|
RU2698496C1 |
| СПОСОБ ПОИСКА И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ ГАММА-ИЗЛУЧЕНИЯ | 2011 |
|
RU2471205C2 |
| БЛОК ДЕТЕКТИРОВАНИЯ ГАММА-ИЗЛУЧЕНИЯ В СОСТАВЕ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ЛЕГКОГО КЛАССА | 2013 |
|
RU2565335C2 |
| Способ локализации источников ионизирующих излучений мобильными комплексами радиационного контроля | 2020 |
|
RU2748937C1 |
| Способ определения количества точечных источников гамма-излучения в пределах обследуемого района | 2024 |
|
RU2832988C1 |
| Способ определения местоположения точечного источника гамма-излучения на местности | 2015 |
|
RU2620449C2 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ГАММА-ИЗЛУЧЕНИЯ В УСЛОВИЯХ НЕРАВНОМЕРНОГО РАДИОАКТИВНОГО ЗАГРЯЗНЕНИЯ | 2016 |
|
RU2640311C1 |
| Способ автоматического определения местоположения точечного источника гамма-излучения на местности | 2016 |
|
RU2620451C1 |
| Способ определения местоположения и активности точечных источников гамма-излучения на местности | 2024 |
|
RU2838014C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ГАММА-ИЗЛУЧЕНИЯ ПО ДВУМ КООРДИНАТАМ В ТЕЛЕСНОМ УГЛЕ 2π СТЕРАДИАН | 2014 |
|
RU2579799C1 |
Изобретение относится к области ядерного приборостроения и может быть использовано при радиационном мониторинге в качестве средства поиска и дистанционного определения координат источника гамма-излучения. Технический результат - повышение обнаружительной способности и точности дистанционного определения координат источника гамма-излучения. Устройство для осуществления навигации робота в полях гамма-излучения содержит детектор гамма-излучения и GPS-модуль, при этом в качестве детектора гамма-излучения установлен многоэлементный азимутальный угломер-обнаружитель, устройство дополнительно содержит бесплатформенную инерциальную навигационную систему и одометр, причем все элементы связаны между собой через бортовой процессор, устройство установлено на мобильный робототехнический комплекс. 2 ил.
Устройство для осуществления навигации робота в полях гамма-излучения, содержащее детектор гамма-излучения и GPS-модуль, отличающееся тем, что в качестве детектора гамма-излучения установлен многоэлементный азимутальный угломер-обнаружитель, устройство дополнительно содержит бесплатформенную инерциальную навигационную систему и одометр, причем все элементы связаны между собой через бортовой процессор, устройство установлено на мобильный робототехнический комплекс.
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ГАММА-ИЗЛУЧЕНИЯ В УСЛОВИЯХ НЕРАВНОМЕРНОГО РАДИОАКТИВНОГО ЗАГРЯЗНЕНИЯ | 2000 |
|
RU2195005C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 2000 |
|
RU2187832C2 |
| МОБИЛЬНЫЙ РОБОТ | 2007 |
|
RU2339501C1 |
| US 6496754 B2, 17.12.2002. | |||

