Изобретение относится к экологическим системам сбора и обработки информации и может быть использовано для проведения мониторинга атмосферного воздуха точечных и площадных источников загрязнения.
Известен способ выявления зон загрязнений атмосферного воздуха (пат. RU №2018156, опубл. 15.08.1994), заключающаяся в том, что для контроля чистоты воздуха населенных мест получают изображение земной поверхности путем проведения космической съемки в инфракрасном диапазоне спектры 0,8-0,9 мкм, определяют координаты точек полученного изображения, измеряют величины уровня яркости участков изображения земной поверхности и обрабатывают результаты измерений, при котором квантуют участки изображения по уровню яркости, окрашивают в условные цвета участки изображения различного оптического контраста и выделяют участки изображения земной поверхности с условными цветами, контрастными условным цветам окружающих их участков изображения.
Недостатком способа является использование дорогостоящего оборудования для космомониторинга и невозможность выявления локальных загрязнений на различных горизонтальных уровнях в атмосфере.
Известен способ обнаружения чрезвычайной ситуации и ликвидации ее последствий (пат. RU №2350368, опубл. 27.04.2008), заключающийся в том, что для обнаружения чрезвычайной ситуации и ликвидации ее последствий, прежде всего катастрофического характера, на борту беспилотного летательного аппарата (БЛА) установлены средства наблюдения района чрезвычайной ситуации, в том числе в оптическом и/или инфракрасном диапазоне, а также средства определения координат и средства передачи по радиоканалу связи данных наблюдения и координат, причем средства дистанционного пилотирования беспилотного летательного аппарата и средства приема по радиоканалу связи данных наблюдения района чрезвычайной ситуации и его координат установлены на станции мониторинга и управления. Средства для ликвидации последствий чрезвычайной ситуации размещены в пилотируемом экипажем транспортном средстве. Введены средства приема с беспилотного летательного аппарата или со станции мониторинга и управления полетом данных наблюдения района чрезвычайной ситуации и его координат, а также данных о координатах, высоте и скорости полета беспилотного летательного аппарата и демонстрации их экипажу транспортного средства со средствами для ликвидации последствий чрезвычайной ситуации. Обеспечивается интеграция в единую систему всех указанных выше средств для ликвидации чрезвычайной ситуации, что исключает технические сбои и ошибки управления.
Недостатком способа является использование БЛА только для обнаружения чрезвычайной ситуации, а оборудование БЛА позволяет лишь фиксацию событий, принятие же решений осуществляется на посту централизованного наблюдения, для чего необходимо затрачивать дополнительные временные и человеческие ресурсы.
Известен способ экологического мониторинга химически опасных объектов (пат. RU №2385473, опубл. 27.03.2010), принятый за прототип, заключающийся в определении концентрации опасных веществ в рабочей зоне объекта, санитарно-защитной зоне, зоне защитных мероприятий и опасной зоне окружающей среды, сравнивают полученные результаты с ПДК, при превышении полученных результатов прогнозируют зону заражения и поражающего действия, учитывая метеоусловия и объем выброса опасных веществ, при угрожающем прогнозируемом развитии аварии или возникновении аварийной ситуации адаптивно подключают в реальном масштабе времени в указанных зонах в зависимости от прогнозируемого развития опасных последствий передвижные лаборатории анализа, лазерные лидары, постоянные посты контроля для принятия решения о чрезвычайной ситуации, постоянные посты контроля устанавливают «треугольником» и оперативно определяют координаты возможного выброса опасных веществ путем взаимной корреляции параметров зараженного облака и ударной волны взрыва, исходя из времени прихода сигналов на посты контроля, а достоверность возможного выброса опасных веществ подтверждается регистрацией аварийных измерительных сигналов всеми тремя постами, отличающийся тем, что дополнительно устанавливают подфакельный пост, который располагается с подветренной стороны относительно центра «треугольника», образованного постоянными постами контроля, и перемещается на основании данных, поступающих с метеорологических датчиков, по внутреннему или внешнему условному контуру «треугольника».
Недостатком данного изобретения является невозможность определения уровня загрязнения на различных высотах от источника загрязнения, а также недостаточное количество точек замеров для определений опасных полей концентраций.
Техническим результатом изобретения является повышение точности и скорости определения преобладающих зон загрязнения на различных горизонтальных и вертикальных уровнях от источника загрязнения.
Технический результат достигается тем, что в способе мониторинга атмосферного воздуха, включающем определение концентрации опасных веществ в рабочей зоне объекта, санитарно-защитной зоне, зоне защитных мероприятий и опасной зоне окружающей среды, сравнение полученных результатов с ПДК, прогнозирование зоны заражения и зоны поражающего действия, учитывая метеоусловия и объем выброса опасных веществ, определение текущего значения концентрации опасных веществ осуществляют с помощью беспилотного летательного аппарата (БЛА), оснащенного навесным оборудованием, на нескольких горизонтальных уровнях от 0 до 1000 м с шагом 50-100 м, а на каждом горизонтальном уровне в заданных точках по спирали Архимеда, и передают измеренные значения концентраций на пост дистанционного наблюдения, где строят поля концентрации и по ним определяют преимущественное направление переноса опасного вещества для каждого горизонтального уровня.
Преимущественное направление переноса опасного вещества для каждого горизонтального уровня может быть принято за центральную ось траектории облета каждого горизонтального уровня вторым БЛА, представляющей собой объемную спираль, лежащую на поверхности конуса из источника загрязнения с углом в вершине 90°, при этом замеры навесным оборудованием осуществляют в точках, одинаково удаленных от источника загрязнения в автоматическом режиме через равные промежутки времени, а после обработки показаний второго БЛА строят трехмерную модель распределения различных типов загрязнений в точках максимальной и фоновой концентрации, которые сравнивают с действующими нормативами.
В качестве беспилотных летательных аппаратов БЛА могут быть использованы малогабаритные БЛА самолетного или вертолетного типа, а в качестве навесного оборудования могут быть использованы газоанализатор, пылемер, радиометр.
Максимальную длину полета БЛА выбирают 10-20 км от источника загрязнения.
Использование БЛА для определения текущего значения концентрации опасных веществ обеспечивает быстрое определение уровня загрязнения на различных высотах от источника загрязнения.
Определение текущего значения концентрации опасных веществ на нескольких горизонтальных уровнях от 0 до 1000 м с шагом 50-100 м, а на каждом горизонтальном уровне в заданных точках по спирали Архимеда обеспечивает получение большого количества точек измерения, использование которых позволит мгновенно создавать трехмерные модели переноса загрязняющих веществ от источника и эффективно определять основные зоны загрязнения на различных расстояниях от источника.
Выбор преимущественного направления переноса опасного вещества для каждого горизонтального уровня за центральную ось траектории облета каждого горизонтального уровня вторым БЛА, представляющей собой объемную спираль, лежащую на поверхности конуса из источника загрязнения с углом в вершине 90°, обеспечит более полную интерпретацию движения загрязняющих веществ на различных горизонтальных уровнях и их распределение в зависимости от преобладающего направления ветра.
Максимальная длина полета БЛА 10-20 км от объекта - источника загрязнения обеспечивает выявление всех возможных зон накопления загрязнений от изучаемого источника и вклад его в фоновый уровень загрязнений за пределами санитарно-защитной зоны.
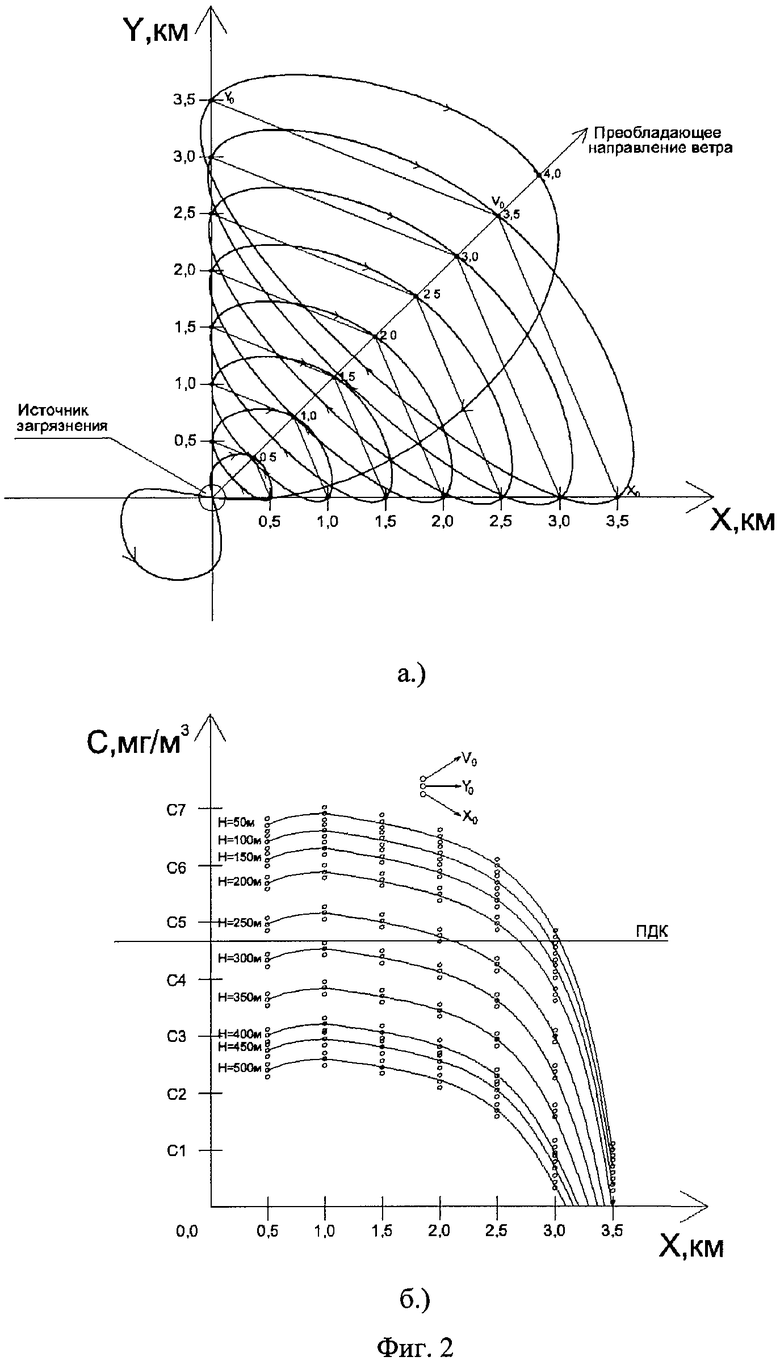
Способ мониторинга атмосферного воздуха осуществляют в две стадии. На фиг.1, а и б представлена траектория полета БЛА по спирали Архимеда на первой стадии, на фиг.2, а представлена траектория полета БЛА на второй стадии, на фиг.2, б представлены полученные данные для построения 3-d модели.
1 стадия.
1.1. Принимают решение о выборе основного оцениваемого опасного вещества или загрязняющего фактора (концентрация пыли, вредных газов, таких как CO, SO2, SO3, NO2 и т.п., γ-излучения) в рабочей зоне объекта - источника загрязнения, санитарно-защитной зоне, зоне защитных мероприятий и опасной зоне окружающей среды.
1.2. Определение текущего значения концентрации опасных веществ осуществляют с помощью беспилотного летательного аппарата (БЛА), оснащенного навесным оборудованием. В качестве беспилотных летательных аппаратов БЛА используют малогабаритные БЛА самолетного или вертолетного типа, а в качестве навесного оборудования используют газоанализатор, пылемер, радиометр. Определение осуществляют на нескольких горизонтальных уровнях от 0 до 1000 м с шагом 50-100 м. Запускают первый БЛА от объекта - источника загрязнения, на первый горизонтальный уровень высотой 50 м по траектории, описываемой спиралью Архимеда, с выбранным одинаковым шагом спирали по плоскости (например, 0,25 или 0,5 км).
1.3. Конечный диаметр спирали Архимеда определяют значением санитарно-защитной зоны, которая может достигать 5000 м. При движении по спирали Архимеда производят отбор проб воздуха с автоматической передачей на пост дистанционного наблюдения по любому возможному каналу (радиоканал, GPS и т.п.), таким образом, как показано на фиг.1,а, то есть при пересечении с осями ОХ и ОУ, а также при пересечении с биссектрисами 4 октантов, тем самым минимальное количество исследуемых точек достигает 33 (*) для оценки загрязнений на удалении по радиусу 4 км (по оси ОХ) от источника загрязнения.
1.4. Измеренные значения концентраций передают на пост дистанционного наблюдения, где строят поля концентрации (фиг.1,б), и по ним определяют преимущественное направление переноса опасного вещества для каждого горизонтального уровня (на различных высотных горизонтах направление переноса загрязняющих веществ может различаться).
Одновременно с этим первый БЛА поднимают на следующий горизонтальный уровень (100 м) и повторяют пп.1.2-1.3.
Для общей оценки загрязнения способ может включать только первую стадию. Для получения более детального анализа распределения загрязнений в направлении преобладающего направления ветра может быть проведена вторая стадия.
2 стадия: траектории облета каждого горизонтального уровня вторым БЛА:
2.1. Преимущественное направление переноса опасного вещества, рассчитанное для первого горизонтального уровня, принимают за центральную ось траектории облета вторым БЛА. Траектория облета второго БЛА представляет собой объемную спираль, лежащую на поверхности конуса из объекта - источника загрязнения с углом в вершине 90°. Запускают второй БЛА по указанной траектории облета, представленной на фиг.2,а.
2.2 Замеры навесным оборудованием вторым БЛА осуществляют в точках, одинаково удаленных от объекта - источника загрязнения в автоматическом режиме через равные промежутки времени.
2.3. При движении в обратном направлении, например, второй БЛА может осуществлять набор высоты до начала отсчета преимущественного направления переноса опасного вещества для второго (следующего) горизонтального уровня и продолжать облет по новой траектории. После этого повторяются пп. 2.1-2.2 до достижения высоты 1000 м.
2.4. Полученные данные для построения 3-d модели показаны на фиг.2,б. По ним делают вывод о дальности переноса загрязняющих веществ и их сравнение с ПДК и нормативными показателями.
2.5. После обработки показаний второго БЛА с использованием известных программных продуктов («Эколог») строят трехмерную модель распределения различных типов загрязнений в точках максимальной и фоновой концентрации, которые сравнивают с ПДК и действующими нормативами.
По итогам мониторинга осуществляют контроль концентрации загрязняющих веществ в верхних слоях атмосферы и суммарного вклада источника загрязнения (котельная, склад, отвал и т.п.) в нижних слоях атмосферы, а мониторинг атмосферного воздуха осуществляют в зависимости от технических возможностей БЛА (скоростных характеристик, мощности аккумуляторной батарее или емкости бака с топливом), и по максимальной длине возможного полета БЛА может достигать 10-20 км от источника загрязнения.
Варианты облета могут использоваться и в отдельности. Для мониторинга атмосферного воздуха в пределах санитарно-защитной зоны (СЗЗ) достаточно осуществлять облет по схеме 1. В соответствии с санитарной классификацией предприятий, производств и объектов устанавливаются следующие размеры санитарно-защитных зон:
- предприятия первого класса - 1000 м;
- предприятия второго класса - 500 м;
- предприятия третьего класса - 300 м;
- предприятия четвертого класса - 100 м;
- предприятия пятого класса - 50 м.
Величина санитарного разрыва от населенного пункта до сельскохозяйственных полей, обрабатываемых пестицидами и агрохимикатами авиационным способом, должна составлять не менее 2000 м. Для особо опасных предприятий СЗЗ может достигать 5000 м. Способ мониторинга по схеме 1 позволит проанализировать действительное влияние предприятия на жилые объекты на границе СЗЗ по вертикальному атмосферному разрезу до 1000 м, что позволит внести определенные рекомендации в действующее законодательство.
Облет БЛА по второй схеме позволит определить вклад загрязняющих веществ по преобладающему направлению ветра на различных высотных горизонтах в общее загрязнение атмосферного воздуха от выбранного источника загрязнения по максимальной длине полета БЛА от поста дистанционного наблюдения.
Использование способа мониторинга атмосферного воздуха позволит повысить точность и скорость определения преобладающих зон загрязнения на различных горизонтальных и вертикальных уровнях от источника загрязнения, определить реальную дальность переноса загрязняющих веществ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА АТМОСФЕРНОГО ВОЗДУХА ГОРНОПРОМЫШЛЕННОЙ ПРОМАГЛОМЕРАЦИИ | 2013 |
|
RU2536789C1 |
| СПОСОБ МОНИТОРИНГА ВОЗДУШНОГО ПРОСТРАНСТВА В ЗОНАХ РАСПРОСТРАНЕНИЯ ОБЛАКОВ ВУЛКАНИЧЕСКОГО ПЕПЛА | 2015 |
|
RU2650850C2 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ХИМИЧЕСКИ ОПАСНЫХ ОБЪЕКТОВ | 2024 |
|
RU2831102C1 |
| Система многопараметрического мониторинга района техногенной аварии | 2024 |
|
RU2840313C1 |
| Модульный беспилотный летательный аппарат с системой защиты тяговых винтов | 2020 |
|
RU2752110C1 |
| СПОСОБ ТРАЕКТОРНОГО УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ МОНИТОРИНГЕ ГОРОДСКОЙ ЗАСТРОЙКИ | 2021 |
|
RU2765758C1 |
| СПОСОБ ОБНАРУЖЕНИЯ РАЗЛИВОВ НЕФТИ ИЛИ НЕФТЕПРОДУКТОВ НА ПОВЕРХНОСТИ ВОДОЕМА | 2016 |
|
RU2622721C1 |
| Способ и комплекс средств эвакуации населения, материальных и культурных ценностей в режиме чрезвычайной ситуации | 2017 |
|
RU2655036C1 |
| СПОСОБ ЗАЩИТЫ ОТ ТЕРРОРИСТОВ НА ВОДНЫХ БАССЕЙНАХ | 2014 |
|
RU2551604C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА АТМОСФЕРНОГО ВОЗДУХА | 2024 |
|
RU2829975C1 |
Изобретение относится к экологическим системам сбора и обработки информации и может быть использовано для проведения мониторинга атмосферного воздуха точечных и площадных источников загрязнения. Техническим результатом изобретения является повышение точности и скорости определения преобладающих зон загрязнения на различных горизонтальных и вертикальных уровнях от источника загрязнения. Способ мониторинга атмосферного воздуха, включающий определение концентрации опасных веществ в рабочей зоне объекта, санитарно-защитной зоне, зоне защитных мероприятий и опасной зоне окружающей среды, сравнение полученных результатов с ПДК, прогнозирование зоны заражения и зоны поражающего действия, учитывая метеоусловия и объем выброса опасных веществ, отличающийся тем, что определение текущего значения концентрации опасных веществ осуществляют с помощью беспилотного летательного аппарата (БЛА), оснащенного навесным оборудованием, на нескольких горизонтальных уровнях от 0 до 1000 м с шагом 50-100 м, а на каждом горизонтальном уровне в заданных точках по спирали Архимеда, и передают измеренные значения концентраций на пост дистанционного наблюдения, где строят поля концентрации и по ним определяют преимущественное направление переноса опасного вещества для каждого горизонтального уровня. 3 з.п. ф-лы, 2 ил.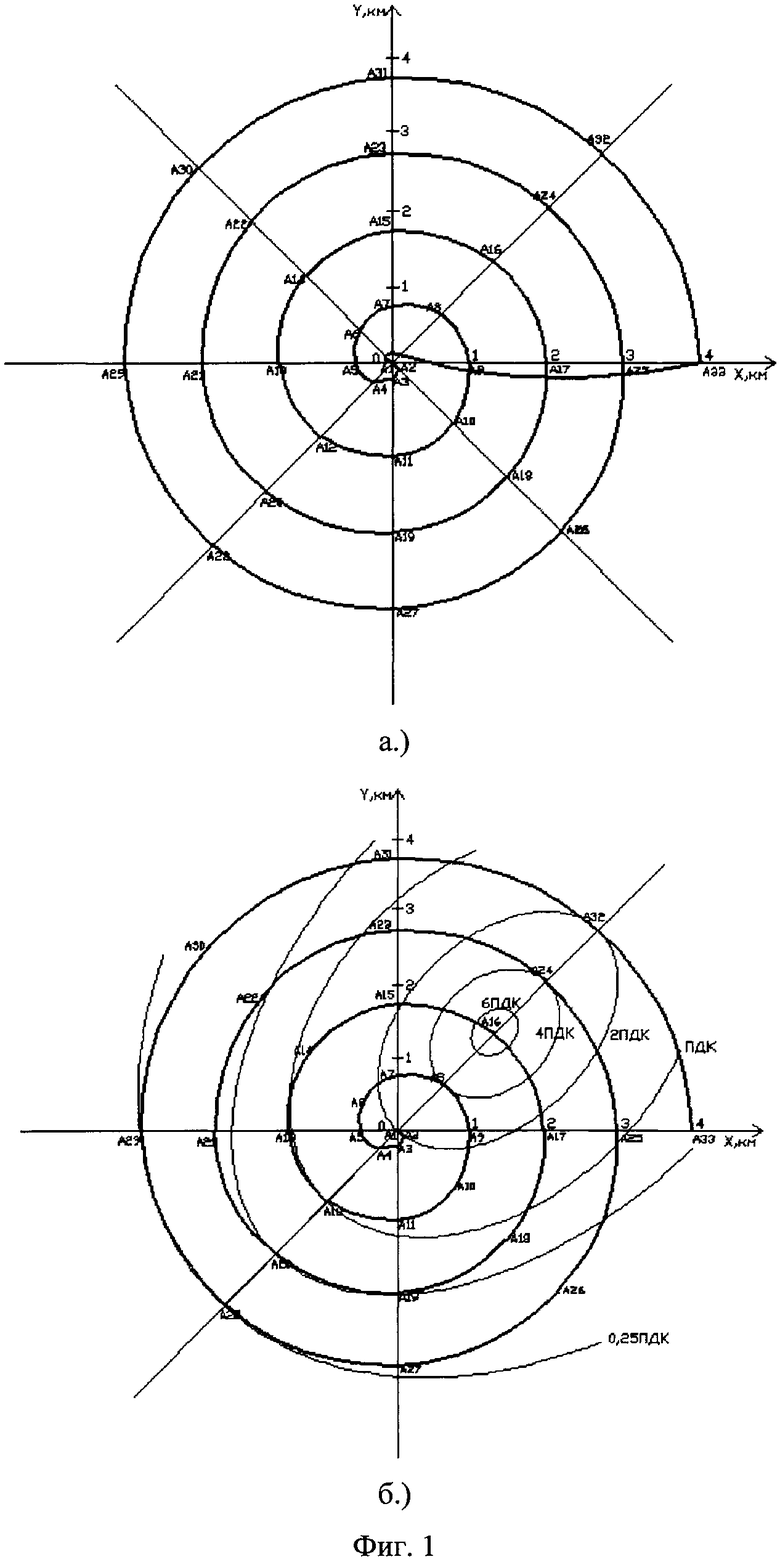
1. Способ мониторинга атмосферного воздуха, включающий определение концентрации опасных веществ в рабочей зоне объекта, санитарно-защитной зоне, зоне защитных мероприятий и опасной зоне окружающей среды, сравнение полученных результатов с ПДК, прогнозирование зоны заражения и зоны поражающего действия, учитывая метеоусловия и объем выброса опасных веществ, отличающийся тем, что определение текущего значения концентрации опасных веществ осуществляют с помощью беспилотного летательного аппарата (БЛА), оснащенного навесным оборудованием, на нескольких горизонтальных уровнях от 0 до 1000 м с шагом 50-100 м, а на каждом горизонтальном уровне в заданных точках по спирали Архимеда, и передают измеренные значения концентраций на пост дистанционного наблюдения, где строят поля концентрации и по ним определяют преимущественное направление переноса опасного вещества для каждого горизонтального уровня.
2. Способ по п.1, отличающийся тем, что преимущественное направление переноса опасного вещества для каждого горизонтального уровня принимают за центральную ось траектории облета вторым БЛА, представляющей собой объемную спираль, лежащую на поверхности конуса из источника загрязнения с углом в вершине 90°, при этом замеры навесным оборудованием осуществляют в точках, одинаково удаленных от источника загрязнения, в автоматическом режиме через равные промежутки времени, а после обработки показаний второго БЛА строят трехмерную модель распределения различных типов загрязнений в точках максимальной и фоновой концентраций, которые сравнивают с действующими нормативами.
3. Способ по п.1 или 2, отличающийся тем, что в качестве БЛА используют малогабаритные БЛА самолетного или вертолетного типа, а в качестве навесного оборудования используют газоанализатор, пылемер, радиометр.
4. Способ по п.1 или 2, отличающийся тем, что максимальную длину полета БЛА выбирают 10-20 км от источника загрязнения.
| СПОСОБ ОЦЕНКИ УРОВНЯ ЗАГРЯЗНЕНИЯ АТМОСФЕРЫ | 2007 |
|
RU2346270C2 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ХИМИЧЕСКИ ОПАСНЫХ ОБЪЕКТОВ | 2007 |
|
RU2346302C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАГРЯЗНЕНИЯ ОКИСЬЮ УГЛЕРОДА ПРИЗЕМНОГО СЛОЯ АТМОСФЕРЫ АВТОТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2003 |
|
RU2255360C1 |
| US 20060095210 А1, 04.05.2006 | |||
| US 0006816786 В2, 09.11.2004. | |||

