Изобретение относится к способам траекторного управления группой беспилотных летательных аппаратов (БЛА) и может быть использовано для обеспечения безопасности полета группы БЛА при решении задач мониторинга.
Обеспечение безопасности полета группы беспилотных летательных аппаратов в процессе управления [1] является одной из основных тенденций развития систем с БЛА. Одним из направлений повышения безопасности полета группы БЛА при решении задач мониторинга с использованием маловысотного полета (МВП) в условиях городской застройкой является обход препятствий (зданий, объектов городской инфраструктуры и др.) в горизонтальной плоскости по заранее построенным траекториям. Под безопасностью полета группы БЛА будем понимать состояние этой группы при выполнении возложенной задачи без угрозы причинения вреда как окружающим объектам, так и элементам самой группы. Под мониторингом городских районов будем понимать осуществление группой БЛА полета в городской застройке с использованием маневрирования в горизонтальной плоскости каждого элемента группы без изменения высоты своего полета как с целью слежения за экологическим состоянием города - выявления опасных мест заражения химически опасными веществами, задымления, загрязнения воздуха (при использовании специальных датчиков), так и с целью проведения различного рода профилактических осмотров территорий - ситуация на автомобильных дорогах, уборка улиц, дворов, работы поискового характера в интереса правоохранительных органов с использованием аэрофото- и видеооборудования.
Известен способ дистанционного управления подвижными объектами (патент RU 2315346), включающий излучение несколькими источниками серий импульсов для маркировки нескольких ориентиров, прием и фильтрацию импульсов на подвижных объектах, отличающийся тем, что излучают серию импульсов, маркирующих ориентир, для каждого подвижного объекта, причем излучения осуществляют с временным сдвигом, исключающим наложение импульсов разных серий, при этом на подвижных объектах принимают отраженные от ориентиров импульсы, а начало отсчета времени на всех источниках излучения и прием отраженных импульсов синхронизируют по времени.
Недостатком такого способа является необходимость использования наземного оборудования, которое излучает сигналы для ориентирования подвижных объектов в пространстве. Для приема указанных сигналов на каждом БЛА необходимо наличие дополнительного оборудования, что усложняет конструкцию управляемого объекта.
Известен способ управления роем беспилотных летательных аппаратов (патент RU 2656281), реализованный в способе применения роя беспилотных летательных аппаратов для дистанционного определения местоположения подземных коммуникаций, их поперечного размера и глубины залегания в грунте. Данный способ управления характеризуется тем, что каждый БЛА, образующий рой, оснащается датчиком компонент магнитного поля, управляют этим роем БЛА с центральной станции, под управлением которой перемещают рой БЛА по заданной траектории с заданным взаимным расположением БЛА по вертикали и горизонтали над поверхностью земли над участком, в пределах которого предположительно проложена подземная коммуникация.
Недостатком такого способа является необходимость использования центральной станции (внешнего управления) и каналов связи для передачи сигналов управления для корректировки траектории БЛА, которая осуществляется по показаниям датчиков компонент магнитного поля от протяженного металлического сооружения. Этот фактор существенно ограничивает области применения указанного способа управления.
Наиболее близким аналогом к предлагаемому способу является способ управления беспилотными летательными аппаратами (патент RU 2645249), реализованный в способе мониторинга окружающей среды. Сущность данного способа управления характеризуется тем, что БЛА (узлы сети), оборудованные компьютером, датчиком и передающим устройством, а также геоинформационной системой, взаимодействуют между собой на основе алгоритма роевой самоорганизации и перемещаются и взаимодействует друг с другом в соответствии с роевым или муравьиным принципом. При перемещениях БЛА выполняется заданный сценарий измерений параметров окружающий среды (например, радиационный фон, концентрация, аммиака оксидов азота, серы и т.п.). Каждый подвижный узел определяет вектор (градиент) максимального изменения контролируемых параметров окружающей среды. При этом, каждый подвижный узел - БЛА с комплексом оборудования - самостоятельно прокладывает траекторию своего движения, пытаясь приблизиться к потенциальному объекту, влияющему на типичные параметры окружающей среды, например, пытаясь выявить выбросы опасных веществ, превышение радиационного фона и т.п. При перемещениях БЛА, подвижные узлы децентрализованной системы, обмениваются по радиоканалу информацией между собой для корректировки траекторий движения, в первую очередь для того, чтобы избежать столкновений между собой, и формирования оптимального общего измерительного сценария. За оптимальный сценарий измерений принимают сценарий с выявлением максимума измеряемого параметра. Данный способ управления группой БЛА имеет ряд недостатков, а именно требует кропотливой дополнительной работы по формированию большого объёма геопространственных данных, что не приемлемо при выполнении оперативных задач мониторинга на малознакомой местности. Кроме этого способ предполагает наличие на борту каждого узла сети, кроме полезной нагрузки, радиопередающего устройства, радиоприемного устройства, а также компьютера с геоинформационной системой, что существенно усложняет и удорожает каждый узел. Кроме этого при выбранном способе управления узлами на основе выявления максимума измеряемого параметра невозможно заранее предположить, где будут находится узлы сети, например, при отсутствии загрязняющих источников.
Техническим результатом предлагаемого изобретения является повышение безопасности полета группы БЛА за счет использования автоматизации процесса обхода препятствий (зданий, объектов городской инфраструктуры и др.) в заранее заданном районе города в горизонтальной плоскости при маловысотном полете БЛА.
Заявленный технический результат достигается за счет того, что при планировании маршрута полета группы БЛА в заранее заданном районе города на заранее заданной высоте для каждого элемента группы строится своя траектория полета, для чего каждое препятствие (здание) в горизонтальной плоскости аппроксимируется прямоугольником. Облет препятствий группой БЛА осуществляется по очереди. Оператор для описания выбранного препятствия указывает только центр такого прямоугольника, длины его сторон и ориентация. Указанные данные записываются в бортовую систему автоматического управления (САУ) каждого БЛА. Затем осуществляется непосредственно управление каждым БЛА в группе с обходом препятствия путем сравнения (в бортовом вычислительном комплексе) текущей траектории полета (определяется штатными бортовыми средствами) с заданной траекторией, записанной в САУ, и при их расхождении выработкой управляющего сигнала коррекции.
Возможность достижения технического результата обусловлена следующими причинами:
• отсутствие необходимости использования дополнительного бортового оборудования БЛА;
• инвариантностью к методу наведения, что позволяет не изменять систему управления и алгоритмы применяемых методов управления [3];
• универсальным (однотипным) способом описания препятствий, что дает возможность применять традиционные методы управления летательными аппаратами [2];
• существенным уменьшением времени описания оператором препятствий, что снижает нагрузку на оператора [3].
Вариант взаимного расположения группы 1 управляемых БЛА и препятствия 2 (элемента городской застройки) иллюстрирует фиг. 1 (вид сверху), на которой в начальный момент времени все беспилотные летательные аппараты группы находятся на одной прямой и движутся равномерно с одинаковыми скоростями  , прямолинейно и параллельно земной поверхности на одинаковой заданной высоте.
, прямолинейно и параллельно земной поверхности на одинаковой заданной высоте.
Для таких условий одним из возможных способов управления группой БЛА, обеспечивающий безопасность полета как всей группы, так и каждого ее элемента, является новый способ, полученный на основе математического аппарата метода обратных задач динамики [4] с использованием результатов [7], в котором траектории каждого управляемого i-го БЛА (i=1,N , где N-количество БЛА в группе) корректируются при сближении с препятствием путем совмещения его вектора скорости с касательной, построенной к желаемой траектории для i-го БЛА. Вычисление требуемого приращения  угла курса (параметра рассогласования) управляемого i-го БЛА производится по правилу:
угла курса (параметра рассогласования) управляемого i-го БЛА производится по правилу:

где  - требуемый курс i-го БЛА, переменные
- требуемый курс i-го БЛА, переменные  и
и  (элементы вектора требуемой скорости i-го БЛА) вычисляются путем выделения мнимой и действительной частей дифференциала функции
(элементы вектора требуемой скорости i-го БЛА) вычисляются путем выделения мнимой и действительной частей дифференциала функции  ,
,  - текущий угол курса i-го БЛА.
- текущий угол курса i-го БЛА.
Выражение для переменных  и
и  имеет вид:
имеет вид:

Функция - комплексный потенциал течения идеальной жидкости при бесциркуляционном обтекании прямоугольного цилиндра [5, 6]. Переменная  - комплексная переменная на комплексной плоскости OXY. Переменные
- комплексная переменная на комплексной плоскости OXY. Переменные  и
и  для каждого i-го БЛА определяются на борту штатной навигационной системой. В качестве системы координат выбирается правая прямоугольная системы координат OXY у которой координата
для каждого i-го БЛА определяются на борту штатной навигационной системой. В качестве системы координат выбирается правая прямоугольная системы координат OXY у которой координата  соответствует направлению полета группы БЛА. Все курсовые углы отсчитываются от положительного направления оси ОY по часовой стрелке.
соответствует направлению полета группы БЛА. Все курсовые углы отсчитываются от положительного направления оси ОY по часовой стрелке.
Решение задачи Коши путем нахождения решения системы дифференциальных уравнений (2), удовлетворяющего начальным условиям (координаты начального положения i-го БЛА) позволяет сформировать требуемые траектории для каждого i-го БЛА.
Выражение для комплексного потенциала течения идеальной жидкости при бесциркуляционном обтекании прямоугольного цилиндра может быть получено с использованием конформного отображения внешности прямоугольного цилиндра на внешность кругового цилиндра. В рассматриваемом случае для одного прямоугольника, аппроксимирующего препятствие, искомое выражение имеет вид [5, 6, 7]:

где  и
и  - скорость группы БЛА (до и после обхода препятствия) и её сопряженная скорость,
- скорость группы БЛА (до и после обхода препятствия) и её сопряженная скорость,  - комплексное число, аргумент которого
- комплексное число, аргумент которого  есть угол поворота прямоугольника, комплексное число
есть угол поворота прямоугольника, комплексное число  (
( - смещение центра прямоугольника относительно начала выбранной системы координат OXY) (см. фиг. 1), функция
- смещение центра прямоугольника относительно начала выбранной системы координат OXY) (см. фиг. 1), функция  имеет вид:
имеет вид:
 ,
,
 - угол, зависящий от соотношения сторон прямоугольника (X - длина, Y - высота прямоугольника), коэффициент
- угол, зависящий от соотношения сторон прямоугольника (X - длина, Y - высота прямоугольника), коэффициент  .
.
Корректировка угла курса i-го БЛА начинается тогда, когда происходит отклонение построенной траектории полета для i-го БЛА от первоначальной заданной прямолинейной траектории.
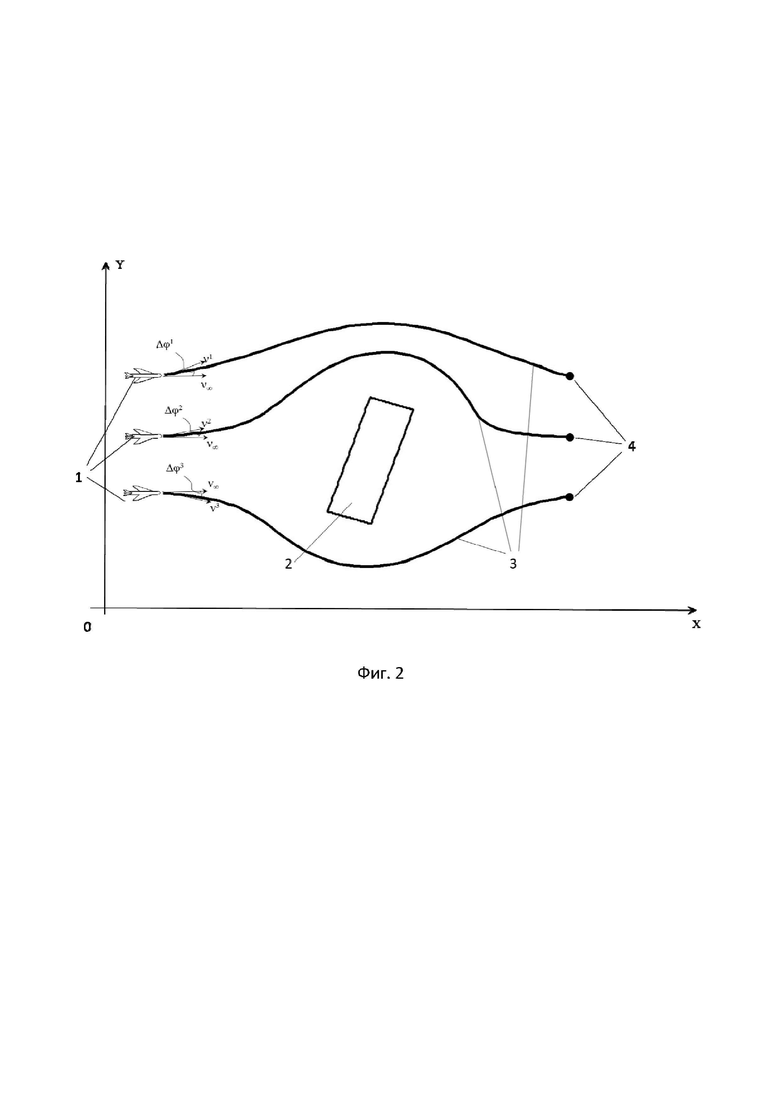
Примерный вид траекторий обхода 3 препятствия 2, которое аппроксимировано прямоугольником, представлен на фиг. 2. Здесь же показаны требуемые приращения угла курса (параметра рассогласования) для каждого управляемого БЛА, сформированные по правилу (1).
Таким образом, для коррекции угла курса при обходе препятствия в горизонтальной плоскости описанным способом (1) - (3) на борту каждого управляемого БЛА необходимо учитывать:
1) параметры движения БЛА - координаты  и
и  , значение скорости
, значение скорости  и текущий угол курса
и текущий угол курса  ;
;
2) параметры препятствия координаты центра прямоугольника аппроксимации  , длины его сторон
, длины его сторон  и
и  , а также угол поворота
, а также угол поворота  прямоугольника в выбранной системе координат OXY.
прямоугольника в выбранной системе координат OXY.
Величины, необходимые для реализации (1) - (3) и составляющие первую группу параметров, измеряются штатными средствами на борту каждого управляемого БЛА, а величины, составляющие вторую группу, расположены в памяти ЭВМ, куда они заносятся непосредственно оператором.
Коррекция угла курса каждого управляемого БЛА прекращается, когда каждый БЛА пролетит всю свою построенную траекторию и выйдет в точку полета 4, расположенную на прямолинейной траектории для каждого БЛА, фиг.2 .
Спецификой описанного способа является то, в качестве требуемых траекторий полета элементов группы БЛА использованы линии тока идеальной жидкости, построенные с применением положений функции комплексного переменного. Такие линии являются непрерывными и гладкими, что позволяет их использовать в качестве траекторий полета. Кроме этого, построенные таким образом требуемые траектории не пересекаются [5], что позволяет сохранить взаимное расположение БЛА в группе на всем протяжении полета.
Заявленный технический результат обеспечивается предлагаемым способом (1) - (3) управления каждым БЛА в группе, а также использованием универсального (однотипного) способа описания препятствий (зданий, объектов городской инфраструктуры и др.) в горизонтальной плоскости, что дает возможность существенно уменьшить время описания городской застройки оператором, тем самым снизив на него нагрузку.
Таким образом, указанный технический результат достигается тем, что на основе измеренных значений скорости полета  , координаты
, координаты  и
и  , текущего угла курса
, текущего угла курса  каждого БЛА в группе, а также заданных оператором значения координат
каждого БЛА в группе, а также заданных оператором значения координат  центра прямоугольника аппроксимации, его сторон
центра прямоугольника аппроксимации, его сторон  и
и  , а также угла поворота
, а также угла поворота  , с использованием (3), вычисляется комплексный потенциал потока . Затем с помощью (2) определяются значения переменных и , на основании которых и измеренного значения текущего угла курса , с помощью (1) формируется сигнал требуемого приращения угла курса для каждого БЛА в группе, позволяющий произвести обход объекта городской застройки.
, с использованием (3), вычисляется комплексный потенциал потока . Затем с помощью (2) определяются значения переменных и , на основании которых и измеренного значения текущего угла курса , с помощью (1) формируется сигнал требуемого приращения угла курса для каждого БЛА в группе, позволяющий произвести обход объекта городской застройки.
Важно отметить, что указанный способ траекторного управления группой БЛА реализуется в автономном режиме, при котором параметры движения каждого управляемого БЛА в группе - значение скорости , значение координат БЛА и , а также значение текущего угла курса - определяются непосредственно на борту БЛА. Это обстоятельство позволяет использовать описанный способ управления для коррекции траекторий полета групп летательных аппаратов как гражданской, так и военной авиации, при обходе ими объекта городской застройки в горизонтальной плоскости при маловысотном полете.
Использование изобретения позволит обеспечить безопасный облет группой БЛА городской застройки в горизонтальной плоскости за счет коррекции траектории полета каждого беспилотного летательного аппарата, осуществляющего движение по заранее запланированному маршруту. При этом, применение указанного изобретения позволяет повысить эффективность работы операторов за счет унификации описания типичной городской застройки предложенным способом.
Литература
[1] Верба В.С. Авиационные комплексы радиолокационного дозора и наведения. Состояние и тенденции развития. М.: Радиотехника. 2008. 432 с.
[2] Авиационные системы радиоуправления. Т. 3. Системы командного радиоуправления. Автономные и комбинированные системы наведения / В.И. Меркулов, А.И. Канащенков [и др.]. М.: Радиотехника, 2004. 317 с.
[3] Авиация ПВО России и научно-технический прогресс. Боевые комплексы и системы вчера, сегодня, завтра / Е.А. Федосов [и др.]. М.: Дрофа, 2001.
[4] Крутько П.Д. Обратные задачи динамики в теории автоматического управления. М.: Машиностроение, 2004.
[5] Лойцянский Л.Г. Механика жидкости и газа. Физматгиз, 1959.
[6] Лаврентьев М.А., Шабат Б.В. Методы теории функций комплексного переменного. М.: Наука, 1965, 716 с.
[7] Царева О.О., Попов В.Ю., Сузанский Д.Н. Об одном способе построения траектории беспилотного летательного аппарата в городе. // Вестник московского университета. Серия 3. ФИЗИКА. АСТРОНОМИЯ. 2016. №2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТРАЕКТОРНОГО УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ДЛЯ ОБЛЕТА ГОРОДСКОЙ ЗАСТРОЙКИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2015 |
|
RU2661269C2 |
| СПОСОБ ТРАЕКТОРНОГО УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ДЛЯ ОБЛЕТА РЕЛЬЕФА МЕСТНОСТИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2014 |
|
RU2571845C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВАРИЙНЫХ УСЛОВИЯХ | 2019 |
|
RU2725640C1 |
| СПОСОБ НЕПРЕРЫВНОГО МОНИТОРИНГА КРИТИЧЕСКИ ВАЖНЫХ ОБЪЕКТОВ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО ЗАМКНУТОМУ МАРШРУТУ | 2024 |
|
RU2837602C1 |
| СПОСОБ И УСТРОЙСТВО МНОГОФАКТОРНОЙ ЗАЩИТЫ ОБЪЕКТОВ ОТ МИНИАТЮРНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2771865C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОБХОДА И ПРЕОДОЛЕНИЯ ОПАСНЫХ ЗОН БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2797956C1 |
| Способ построения маршрута маловысотного полета на виртуальном полигоне | 2018 |
|
RU2696047C1 |
| Бортовая интеллектуальная система поиска и наведения беспилотного летательного аппарата | 2023 |
|
RU2819590C1 |
| Способ маневрирования высокоскоростного беспилотного летательного аппарата в зоне возможного действия средств противоракетной и противовоздушной обороны | 2016 |
|
RU2635022C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |

Изобретение относится к способам траекторного управления группой беспилотных летательных аппаратов (БЛА) и может быть использовано для обеспечения безопасности полета группы БЛА при решении задач мониторинга. Предлагаемый способ управления позволит повысить безопасность полета группы БЛА за счет использования автоматизации процесса обхода препятствий в заранее заданном районе города в горизонтальной плоскости при маловысотном полете группы БЛА. Объект городской застройки аппроксимируется прямоугольником. Корректировка угла курса i-го БЛА начинается тогда, когда происходит отклонение построенной траектории полета для i-го БЛА от первоначальной заданной прямолинейной траектории, и прекращается, когда i-й БЛА пролетит всю траекторию и выйдет в намеченную i-ю точку полета. Использование изобретения позволит обеспечить безопасный облет группой БЛА городской застройки в горизонтальной плоскости за счет коррекции траектории полета каждого беспилотного летательного аппарата, осуществляющего движение по заранее запланированному маршруту. При этом применение указанного изобретения позволяет повысить эффективность работы операторов за счет унификации описания типичной городской застройки предложенным способом. 2 ил.
Способ траекторного управления группой беспилотных летательных аппаратов (БЛА) при мониторинге городской застройки с использованием маловысотного полета (МВП), заключающийся в том, что облет объекта городской застройки в горизонтальной плоскости без изменения высоты полета осуществляется i-м БЛА по заданным траекториям полета с требуемыми  углами курса для каждого i-го БЛА, отличающийся тем, что траектория каждого i-го БЛА, имеющего текущий угол курса
углами курса для каждого i-го БЛА, отличающийся тем, что траектория каждого i-го БЛА, имеющего текущий угол курса  , корректируется при сближении с препятствием, которое аппроксимируется прямоугольником, для чего вычисление требуемого приращения угла курса
, корректируется при сближении с препятствием, которое аппроксимируется прямоугольником, для чего вычисление требуемого приращения угла курса  (параметра рассогласования) i-го БЛА производится по правилу:
(параметра рассогласования) i-го БЛА производится по правилу:

где

здесь функция  имеет вид
имеет вид

где  и
и  – скорость группы БЛА (до и после обхода препятствия) и её сопряженная скорость,
– скорость группы БЛА (до и после обхода препятствия) и её сопряженная скорость,  – комплексное число, аргумент которого
– комплексное число, аргумент которого  есть угол поворота прямоугольника, комплексное число
есть угол поворота прямоугольника, комплексное число  (
( – смещение центра прямоугольника относительно начала выбранной системы координат OXY), функция
– смещение центра прямоугольника относительно начала выбранной системы координат OXY), функция  имеет вид
имеет вид 
 – угол, зависящий от соотношения сторон прямоугольника (X – длина, Y – высота прямоугольника), коэффициент
– угол, зависящий от соотношения сторон прямоугольника (X – длина, Y – высота прямоугольника), коэффициент  , при этом корректировка угла курса i-го БЛА начинается тогда, когда происходит отклонение построенной траектории полета для i-го БЛА от первоначальной заданной прямолинейной траектории, и осуществляется до момента, когда i-й БЛА пролетит всю траекторию и выйдет в намеченную соответствующую i-ю точку.
, при этом корректировка угла курса i-го БЛА начинается тогда, когда происходит отклонение построенной траектории полета для i-го БЛА от первоначальной заданной прямолинейной траектории, и осуществляется до момента, когда i-й БЛА пролетит всю траекторию и выйдет в намеченную соответствующую i-ю точку.
| Способ мониторинга окружающей среды и беспилотный аппарат для использования в данном способе | 2016 |
|
RU2645249C1 |
| US 2020146102 A1, 07.05.2020 | |||
| US 20160293018 A1, 06.10.2016 | |||
| СИСТЕМА ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА АТМОСФЕРНОГО ВОЗДУХА ПРОМЫШЛЕННОГО РЕГИОНА | 2013 |
|
RU2549222C2 |

