Изобретение относится к области авиационной техники, а именно к беспилотным летательным аппаратам (БЛА) и комплексам в области специальной техники, являющимся дистанционно управляемым или автономно управляемым летательным аппаратом с вертикальным взлетом и посадкой как на твердую, так и на водную поверхности, с системой защиты тяговых винтов, расположенных на одной оси с автоматом перекоса винтов, вращающихся в противоположные стороны и предназначенный для дистанционной работы. БЛА имеет жесткий несущий каркас на одной центральной оси расположены и жестко закреплены два противоположно вращающихся двигателя с автоматами перекоса фиксированного размера воздушных винтов; восемь полых, герметичных модулей, жестко скрепляемых с несущей рамой и друг с другом через уплотнители, поверхность которых после скрепления образует жесткий аэродинамический профиль с защитной сеткой сверху и снизу с движителями и воздушными винтами внутри; питающие элементы движителей, система управления с навигацией, устройство сбора и обработки информации расположены внутри герметичных, полых модулей, позволяющих приземляться на твердую и водную поверхностью с возможностью последующего взлета. Несущий жесткий каркас и модули БЛА выполнены из высокопрочного пластика, обеспечивающего жесткость, надежность и малый вес конструкции.
Известен БЛА и комплекс наблюдения для него [1]. БЛА снабжен четырьмя гидролыжами, расположенными в носовой и кормовой частях корпуса и на оконечностях каждого крыла, гидролыжа выполнена в виде гондолы. Гидролыжи расположенные в носовой и кормовой частях корпуса оборудованы вертикальными движителями, а гидролыжи расположенные на оконечностях каждого крыла, снабжены горизонтальными движителями. Комплекс может применяться для фото- и видеоразведки в режиме реального времени, для биологической, химической и ядерной разведки местности, облета периметров охраняемых объектов, передачи данных в системы охраны. Достоинством данной системы являются повышенная устойчивость при маневрировании, увеличенная продолжительность полета, вследствие более эффективного использования электроэнергии за счет использования шести электродвигателей; возможность пилотирования в автоматическом режиме по заданному маршруту за счет использования маршрутного вычислительного устройства и сигналов спутниковой навигационной системы. Недостатком данного решения является то, что БЛА имеет большие габариты, открытые воздушные винты и невысокую маневренность, что не позволяет проводить работы по наблюдению за обстановкой на участках местности имеющих множество преград таких как лесные массивы, город, общественные места с большим скоплением людей, технические, производственные помещения, хранилищах, так же открытые винты являются потенциально опасными факторами воздействия на живые организмы, людей при соприкосновении с ними, столкновении. Кроме того, гидро-планер не имеет возможности вертикального взлета, что ограничивает возможности его применения.
Известен беспилотный летательный аппарат, выполненный в форме шара, с силовой установкой импеллерного типа [3]. Органы управления положением и ориентацией БПЛА в пространстве реализованы в виде четырех аэродинамических поверхностей - рулей, отклоняемых сервоприводами. Используемая силовая установка импеллерного типа, обладает наименьшим компоновочным объемом в сравнении с одновинтовой или соосной силовыми установками, что позволяет увеличить долю полезной нагрузки. Пространство между силовым каркасом и кожухом импеллера может быть использовано для размещения различной полезной нагрузки, в соответствии с прикладными задачами БЛА. Однако данное устройство имеет ряд недостатков, во-первых, высокие требования к точности изготовления составных частей, сложность производства и низкая ремонтопригодность силовой установки импеллерного типа, во-вторых наличие вибраций при работе импеллера, вносящих шумы и ошибки в работу систем, расположенных на каркасе БПЛА. В-третьих, в конструкции данного БПЛА не предусмотрен принцип модульности, что исключает возможность оперативной замены полезной нагрузки (измерительной аппаратуры) в соответствии с прикладными задачами. В-четвертых, не предусмотрена гидроизоляция бортовой аппаратуры данного БПЛА, не обеспечена его плавучесть, что в свою очередь исключает возможность посадки, взлета и стационарной работы с поверхности воды.
Известен беспилотный летательный аппарат [4], который может быть использован для дистанционного видео- и фото- зондирования поверхности Земли, мониторинга техногенных и природных объектов, ретрансляции радио- и оптических сигналов, скрытого наблюдения. Достоинством изобретения является повышение грузоподъемности при одинаковой затраченной мощности на осуществление полета, за счет применения колец, внутренняя поверхность которых имеет аэродинамический профиль, в результате чего, винтомоторные группы трансформируются в винтокольцевые движители, обладающие дополнительной вертикальной тягой. Недостатком этого устройства является отсутствие герметичности узлов и агрегатов, вследствие чего БЛА не имеет возможность посадки на водную поверхность, стационарного мониторинга, наблюдения на водной поверхности и взлета с водной поверхности.
Известна также автоматизированная система обнаружения радиоактивных материалов, включающая в себя от одного БЛА и, по меньшей мере, один наземный пункт управления, причем БЛА включает в себя корпус с посадочными опорами, силовую установку, соединенную по меньшей мере с одним пропеллером, детектор радиоактивного излучения, видеокамеру, бортовой блок управления, устройство сбора и обработки информации, соединенное с ним навигационное оборудование определения местоположения, автономный источник электропитания и может быть использована для обнаружения радиоактивных материалов, а также мониторинга радиационного фона в труднодоступных участках местности [2]. БЛА имеет от трех двигателей, закрепленных на корпусе, на которых установлены по меньшей мере по одному пропеллеру, оси которых расположены вниз, вдоль силы тяжести, и вращающиеся в одной плоскости, которые являются наиболее близким по технической сущности решением к заявленному изобретению. Достоинством данного прототипа является высокая эффективность обнаружения радиоактивных материалов наряду с низкой себестоимостью системы.
Недостатком этого устройства является то, что:
- выполнен на базе БЛА с открытыми движителями и лопастями, что может являться опасным при взаимодействии с человеком или живым существом;
- не может проводить мониторинг и наблюдение в труднодоступных участках местности, закрытых производственных, промышленных и складских помещениях с работающими сотрудниками или на территориях с большим скоплением людей;
- не имеет возможность посадки на водную поверхность, стационарного мониторинга, наблюдения на водной поверхности и взлета с водной поверхности;
- проведение мониторинга не только в движении, но и стационарно после посадки на землю или водную поверхность;
- отсутствие модульной конструкции, не позволяет использовать БЛА как универсальное многозадачное средство для мониторинга и наблюдения с возможностью быстрой смены оборудования для выполнения новых задач;
- отсутствует герметичность узлов и агрегатов БЛА;
- отсутствует защита воздушных винтов.
Таким образом, задачей настоящего изобретения является создание БЛА, во-первых имеющего возможность осуществлять мониторинг и наблюдение в опасных и трудных для маневрирования БЛА местах, таких как лесные территории, города, технические и промышленные помещения, в которых имеется вероятность столкновения с предметами или живыми существами, во-вторых исключающая повреждения воздушных винтов, причинения вреда живым существам или оборудованию конструкция БЛА, в-третьих обеспечивающая возможность посадки на водную поверхность, стационарную работу на ней и последующим взлетом с нее модульная схема с герметичными, жестко соединяемыми модулями, с расположением винтов внутри образуемого аэродинамического корпуса (жесткого каркаса), с возможностью быстрой замены герметичных модулей.
Технический результат, на достижение которого направленно заявленное изобретение (фиг. 1, фиг. 2), заключается в создании герметичной жесткой модульной аэродинамической конструкции БЛА с движителями и воздушными винтами внутри с возможностью посадки, взлета с водной и твердых поверхностей и работы на них, безопасной при использовании для живых существ и оборудования с возможностью защиты воздушных винтов от повреждения и быстрой смены модулей с оборудованием для решения поставленных задач. Технический результат, достигаемый с помощью заявленного устройства модульный беспилотный летательный аппарат с системой защиты тяговых винтов, содержащий жесткий каркас, силовую установку, соединенную по меньшей мере с одним пропеллером, детектором радиоактивного излучения, видеокамеру, бортовой блок управления, устройство сбора и обработки информации, соединенное с ним навигационное оборудование определения местоположения, автономный источник электропитания, расположением на несущем жестком каркасе на одной центральной оси и жестко закрепленными двумя противоположно вращающихся движителя с автоматами перекоса фиксированного размера тяговых воздушных винтов; восемь полых, герметичных модулей, жестко скрепляемых с несущим жестким каркасом и друг с другом через уплотнители, поверхность которых после скрепления образует жесткий аэродинамический профиль с защитной сеткой сверху и снизу с движителями и тяговыми воздушными винтами внутри; питающие элементы движителей, система управления с навигацией, устройство сбора, обработки и хранения информации расположены внутри герметичных, полых модулей.
В полете беспилотный летальный аппарат поддерживает вертикальное положение относительно поверхности земли, может зависать, перемещаться в стороны, вверх и вниз.
Во время полета и после приземления, при необходимости, работают датчики мониторинга и средства наблюдения, комплекс датчиков мониторинга определяется в зависимости от решаемых задач мониторинга.
Особенность нашей страны, заключается в обширной территории, низкой плотности заселения территорий и высокой концентрации людей в крупных городах, наличие регионов с постоянными природными чрезвычайными ситуациями (наводнения, землетрясения, лесные пожары, оползни и других). Все перечисленное осложняет работу министерств ответственных и участвующих в ликвидации последствий аварий и требует от них постоянной готовности, быстрого реагирования и оперативной информации об обстановке.
Особую опасность представляют аварии на атомных объектах, крупных химических производствах и местах хранения высокотоксичных и токсичных веществ, размещенных в непосредственной близости от населенных пунктов. Высокие риски, обусловленные угрозами возникновения техногенных чрезвычайных ситуаций (ЧС) и катастроф, связаны с большим износом и старением основных производственных мощностей, в связи с чем использованием возможностей беспилотной авиации приобретает все большую актуальность, с учетом необходимости сохранения здоровья и жизни людей в сложных условиях крупных техногенных катастроф с радиоактивными, химическими и биологическими объектами, поэтому предупреждение, выявление, локализация ЧС и ликвидации их последствий.
Беспилотный летательный аппарат предназначен для решения следующих задач:
- беспилотный дистанционный мониторинг лесных массивов, жилых и производственных территории с целью сбора информации о состоянии ОС и степени ее загрязненности;
- мониторинг и передача данных по радиоактивному и химическому заражению местности и воздушного пространства в заданном районе;
- инженерная разведка районов наводнений, землетрясений и других стихийных бедствий;
- экологический мониторинг водных акваторий и береговой линии;
- определение точных координат районов выброса загрязняющих веществ в ОС и пострадавших объектов.
Мониторинг осуществляется днем и ночью, в благоприятных и ограниченных метеоусловиях. Наряду с этим беспилотный летательный аппарат обеспечивает поиск потерпевших аварию (катастрофу) технических средств и пропавших групп людей. Поиск проводится по заранее введенному полетному заданию или по оперативно изменяемому оператором маршруту полета. Он оснащен системами наведения, бортовыми радиолокационными комплексами, датчиками и видеокамерами.
Во время полета, как правило, управление беспилотным летательным аппаратом автоматически осуществляется посредством бортового комплекса навигации и управления, в состав которого входят:
- приемник спутниковой навигации, обеспечивающий прием навигационной информации от систем ГЛОНАСС и GPS;
- система инерциальных датчиков, обеспечивающая определение ориентации и параметров движения беспилотного летательного аппарата;
- система датчиков, обеспечивающая измерение высоты и воздушной скорости;
- различные виды антенн.
Бортовая система связи функционирует в разрешенном диапазоне радиочастот и обеспечивает передачу данных с борта на землю и с земли на борт.
Задачи для применения БЛА можно классифицировать на следующие основные группы:
- мониторинг окружающей среды, производственных территории, складских помещений и мест хранения токсичных веществ;
- участие в ликвидации последствий аварий и чрезвычайных ситуаций. Для обеспечения широкого спектра возможностей при мониторинге ОС и обнаружении загрязняющих веществ осуществляется благодаря модульной конструкции БЛА и возможности подбора специфических датчиков или устройств. Также модульность конструкции БЛА дает возможность осуществлять приземление на водную поверхность и взлетать с нее, что позволяет проводить мониторинг водной поверхности. Также конструкция предлагаемого БЛА делает его безопасным при столкновении с живыми объектами, т.к. его винты находятся внутри модульного корпуса (жесткого каркаса), исключая возможность их повреждения или причинения вреда. Модульность конструкции и нахождение двигателей с лопастями внутри жесткого каркаса позволяет при столкновении с различными объектами и предметами не повреждать двигатель и лопасти БЛА. Благодаря модульности конструкции и изолированности винтов БЛА реализуется возможность применения внутри помещений, для проведения предварительного мониторинга (в местах хранения токсичных веществ) или мониторинга в интервале времени.
В основу изобретения поставлена задача усовершенствования конструкции БЛА для обеспечения требуемых характеристик: возможности оперативной сборки и разборки конструкции БЛА и модульности конструкции БЛА для возможности быстрого подбора конфигурации БЛА с возможностью решения поставленных задач в данной ситуации, удобства транспортировки, повышения надежности и жесткости конструкции, обеспечения равномерного распределения нагрузки на несущий жесткий каркас и защиты подвесной аппаратуры и воздушных винтов и движителей от механических воздействий в случае неудачного приземления, опрокидывания аппарата или его столкновения с препятствием, снижения массы беспилотного летательного аппарата, увеличения продолжительности полета и возможности садиться, осуществлять работу и взлетать с водной поверхности.
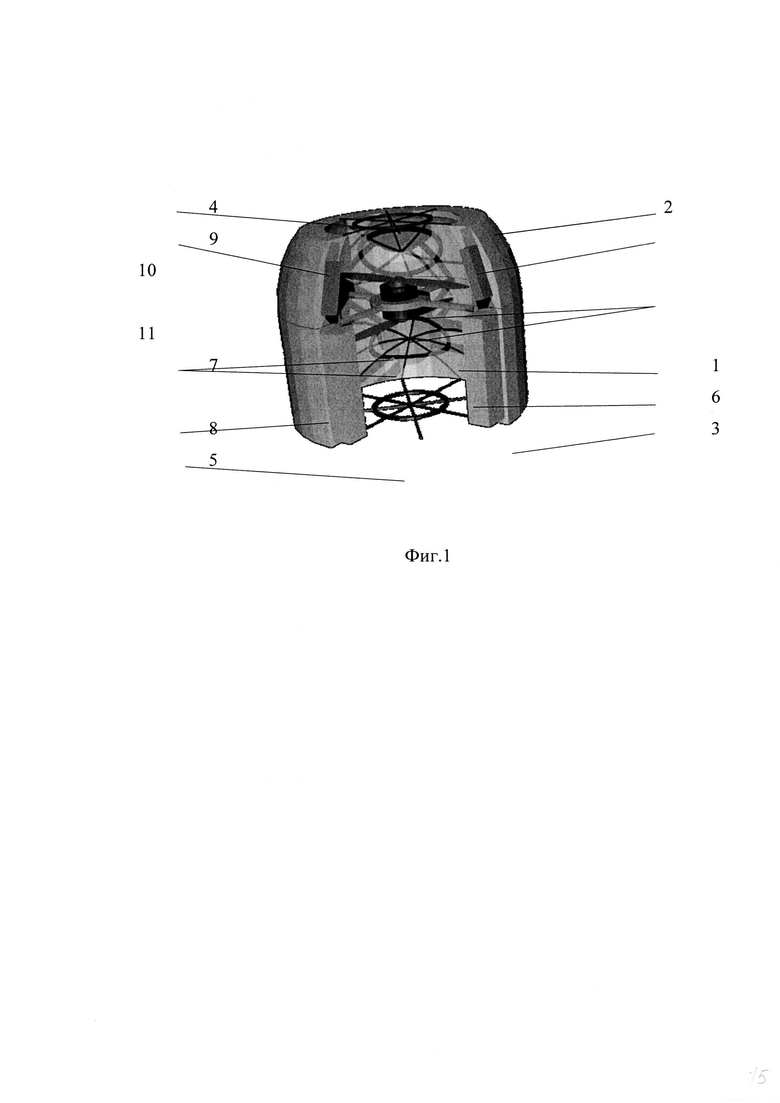
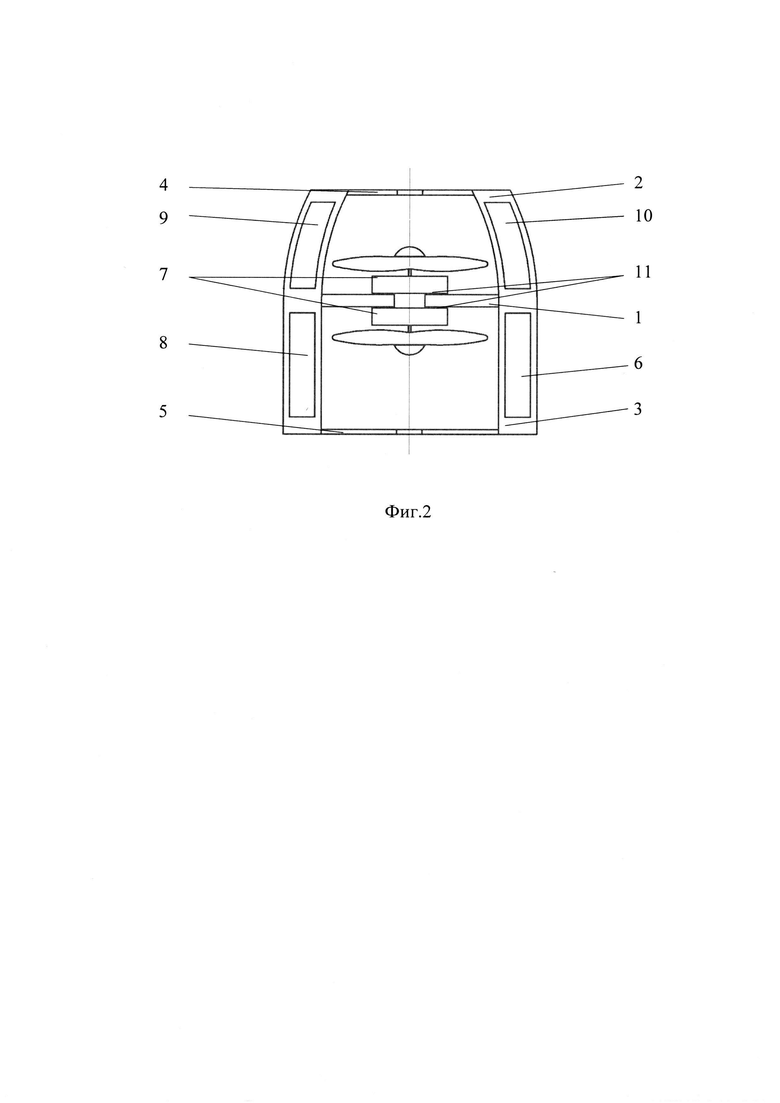
На фиг. 1 представлено пространственное изображение конструкции БЛА, фиг. 2 представлена конструктивная схема модульного беспилотного летательного аппарата с системой защиты тяговых винтов.
Конструктивно БЛА состоит из несущего жесткого каркаса 1, на одной центральной оси расположены и жестко закреплены два противоположно вращающихся движителя 7 с автоматами перекоса 11 фиксированного размера тяговых воздушных винтов 7 восемь полых, герметичных модулей 2,3, жестко скрепляемых с несущим жестким каркасом 1 и друг с другом через уплотнители, поверхность которых после скрепления образует жесткий аэродинамический профиль с защитной сеткой сверху с возможностью крепления фото- видеокамеры 4 и снизу 5 с движителями и тяговыми воздушными винтами внутри. Питающие элементы движителей 6, система управления с навигацией 8, устройство сбора, обработки и хранения информации 9 расположены внутри герметичных, полых модулей.
Беспилотный летательный аппарат являющийся дистанционно пилотируемым или автономно пилотируемым летательным аппаратом. Дальность устойчивого ручного управления составляет до 1-1,2 км. Дальность контролирования БЛА может быть увеличена при передаче с него видеосигнала в режиме реального времени, и при наличии глобального позиционирования, есть возможность автономной работы (самостоятельный полет в заданную точку кратчайшим маршрутом или по заданному маршруту через контрольные точки). Возможность перемещения БЛА по маршруту через контрольные точки позволяет использовать его и как «сопровождающего» наблюдателя при следовании по маршруту движения. Возможность посадки и «работы» на водной поверхности позволяет использовать БЛА как «экологический буй» для проведения работы на водной территории.
Грузоподъемность БЛА до 0,6 кг, что позволяет устанавливать на него различные блоки многоцелевого назначения (для ведения мониторинга и наблюдения за территорией или обстановкой в зависимости от поставленной задачи для работы). Передача информации осуществляется по радиоканалу в режиме реального времени или сохраняется на запоминающем устройстве.
Заявленные технические решения поясняются чертежом фиг. 1 и пространственным отображением чертежа фиг. 2 на которых показаны:
1 - несущий жесткий каркас;
2 - верхний герметичный блок модулей с уплотнителями соединений (4 шт.);
3 - нижний герметичный блок модулей с уплотнителями соединений (4 шт.);
4 - верхняя защитная сетка с возможностью крепления фотовидеокамеры;
5 - нижняя защитная сетка;
6 - питающие элементы движителей;
7 - движители с тяговыми воздушными винтами (2 шт.);
8 - система управления с навигацией;
9 - система приема, обработки и хранения информации мониторинга и наблюдения;
10 - блоки мониторинга и наблюдения за обстановкой (8 шт.);
11 - автоматами перекоса фиксированного размера тяговых воздушных винтов.
Источники информации, принятые во внимание:
1. RU №2642202, 2016 г.
2. RU №128868, 2015 г.
3. RU №171506, 2017 г.
4. RU №2666493, 2018 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат | 2023 |
|
RU2828471C1 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| Способ разведки ледовой обстановки с использованием дистанционно управляемых беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2778158C1 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2017 |
|
RU2681423C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2811206C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС | 2022 |
|
RU2798159C1 |
| Беспилотный летательный аппарат | 2017 |
|
RU2666493C1 |
| Привязная мониторинговая платформа с системой питания | 2019 |
|
RU2724509C1 |
| СПОСОБ ФОРМИРОВАНИЯ МАЛОЗАМЕТНОЙ МОДУЛЬНОЙ БЕСПИЛОТНОЙ ЛЕТАТЕЛЬНОЙ СИСТЕМЫ | 2023 |
|
RU2829915C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ГОРИЗОНТАЛЬНОГО ПОЛЁТА С ВЕРТИКАЛЬНЫМ ВЗЛЁТОМ И ПОСАДКОЙ И НЕСУЩАЯ ПЛАТФОРМА ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА ГОРИЗОНТАЛЬНОГО ПОЛЁТА С ВЕРТИКАЛЬНЫМ ВЗЛЁТОМ И ПОСАДКОЙ | 2018 |
|
RU2693362C1 |
Изобретение относится к области авиации, в частности к конструкциям беспилотных летательных аппаратов (БЛА). БЛА имеет жесткий несущий каркас, на одной центральной оси расположены и жестко закреплены два противоположно вращающихся двигателя с автоматами перекоса фиксированного размера воздушных винтов. Восемь полых герметичных модулей, жестко скрепляемых с несущей рамой и друг с другом через уплотнители, образуют жесткий аэродинамический профиль с защитной сеткой сверху и снизу с двигателями и воздушными винтами внутри. Питающие элементы движителей, система управления с навигацией, устройство сбора и обработки информации расположены внутри герметичных полых модулей, позволяющих приземляться на твердую и водную поверхностью с возможностью последующего взлета. Несущий жесткий каркас и модули БЛА выполнены из высокопрочного пластика, обеспечивающего жесткость, надежность и малый вес конструкции. Обеспечивается создание модульной конструкции, позволяющей осуществлять посадку и взлет БЛА с твердой и водной поверхностей. 2 ил.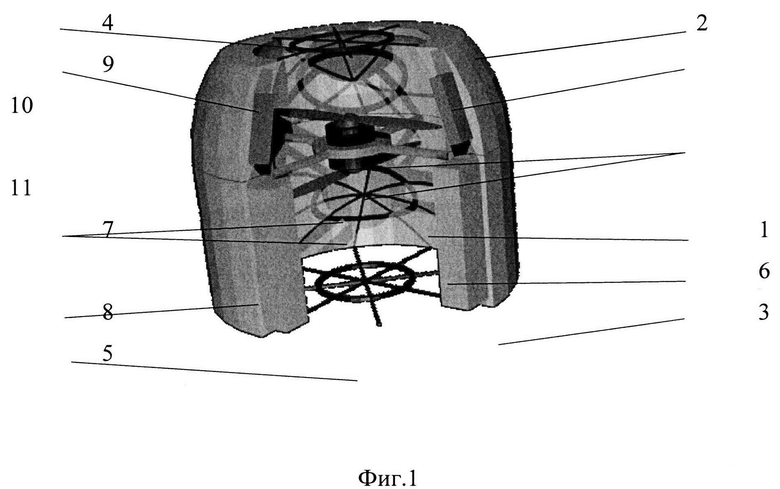
Модульный беспилотный летательный аппарат с системой защиты тяговых винтов, содержащий жесткий каркас, силовую установку, соединенную по меньшей мере с одним пропеллером, детектор радиоактивного излучения, видеокамеру, бортовой блок управления, устройство сбора и обработки информации, соединенное с ним навигационное оборудование определения местоположения, автономный источник электропитания, отличающийся тем, что на несущем жестком каркасе на одной центральной оси расположены и жестко закреплены два противоположно вращающихся движителя с автоматами перекоса фиксированного размера тяговых воздушных винтов, восемь полых герметичных модулей, жестко скрепляемых с несущим жестким каркасом и друг с другом через уплотнители, поверхность которых после скрепления образует жесткий аэродинамический профиль с защитной сеткой сверху и снизу с движителями и тяговыми воздушными винтами внутри, питающие элементы движителей, система управления с навигацией, устройство сбора, обработки и хранения информации расположены внутри герметичных полых модулей.
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ (МБЛА ВВП) | 2011 |
|
RU2455198C1 |
| ШЕРСТОСГОННАЯ МАШИНА | 0 |
|
SU171506A1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1995 |
|
RU2133210C1 |
| US 10017249 B1, 0.07.2018 | |||
| US 20200283136 A1, 10.09.2020. | |||

