Изобретение относится к области оптико-электронного приборостроения, точнее к оптико-электронным приборам наблюдения, обнаружения и видеорегистрации воздушных и наземных объектов, а также может быть использовано в области активной и пассивной локации.
Известны устройства и системы, содержащие азимутальную сканирующую платформу с приводом и датчиком угла, на которой размещают оптико-электронные приборы, в том числе телевизионные камеры и тепловизоры, обеспечивающие круговой обзор и видеорегистрацию наблюдаемого пространства (патенты РФ №№2271552, 2271553, 2321016, 2355005, 2428728, 2460085, патент США №7946213).
Основной недостаток перечисленных устройств состоит в том, что для получения качественного телевизионного или тепловизионного видеокадра требуется остановить движение сканирующей платформы на время экспонирования видеокадров наблюдаемого пространства. Другими словами, регистрацию изображения наблюдаемого пространства можно вести при фиксированном положении визирных осей оптико-электронных устройств, расположенных на сканирующей платформе.
От этого недостатка свободно устройство кругового обзора (Ф.М. Броун и др. Способ кругового обзора матричным фотоприемным устройством и устройство для его осуществления, патент РФ №2445644 от 19.04.2010 г.), содержащее: азимутальную сканирующую платформу с приводом; оптическую систему, установленную на этой платформе; МФПУ, установленное в фокальной плоскости оптической системы; поворотную платформу с датчиком угла поворота; оптический компенсатор, установленный на эту платформу и выполненный в виде преломляющей призмы с четным числом N граней; мультипликатор; блок формирования синхроимпульсов (БФСИ).
Кроме того, для синхронизации работы МФПУ и оптического компенсатора в предлагаемом устройстве вход БФСИ соединен с выходом датчика угла, а выход - со входом кадровой синхронизации МФПУ, а ось поворотной платформы соединена с осью сканирующей азимутальной платформы мультипликатором с коэффициентом передачи Км равным:  .
.
Благодаря введению оптического компенсатора известное устройство позволяет вести сканирование наблюдаемого пространства непрерывно, без остановок движения азимутальной платформы, получая при этом качественные видеокадры.
Недостаток известного устройства состоит в малом времени экспонирования относительно времени кадра, что ухудшает качество видеоизображения МФПУ при работе в условиях низкой освещенности наблюдаемого пространства.
Расчеты показывают, что рабочие углы призмы (углы, при которых для стандартного телевизионного сигнала с разрешением 600 телевизионных строк изображение фиксируется на фоточувствительной поверхности МФПУ с погрешностью в одну телевизионную строку), не превышают ±15° от визирной оси оптической системы устройства, т.е. диапазон рабочих углов компенсатора составляет 30°. Дальнейшее вращение призмы только обеспечивает необходимый ее переход на новые рабочие углы. Например, для четырехгранной призмы, угловой период которой равен 90°, время поворота призмы на этот угол должен быть равен периоду кадровой развертки МФПУ. При этом время поворота призмы в пределах диапазона рабочих углов (30°) составляет соответственно одну треть от периода кадровой развертки. Остальные две трети времени кадра уходят на приведение призмы в начальное положение.
Целью предлагаемого изобретения является увеличение времени экспонирования наблюдаемого пространства.
Физически результат достигается тем, что уменьшается время перевода оптического компенсатора из конечного рабочего положения в начальное рабочее положение путем ускоренного перемещения призмы в начало зоны рабочих углов с помощью механизма прерывистого движения и дифференциального устройства. При этом начало и конец экспонирования изображения наблюдаемого пространства синхронизируется с началом и концом зоны рабочих углов оптического компенсатора.
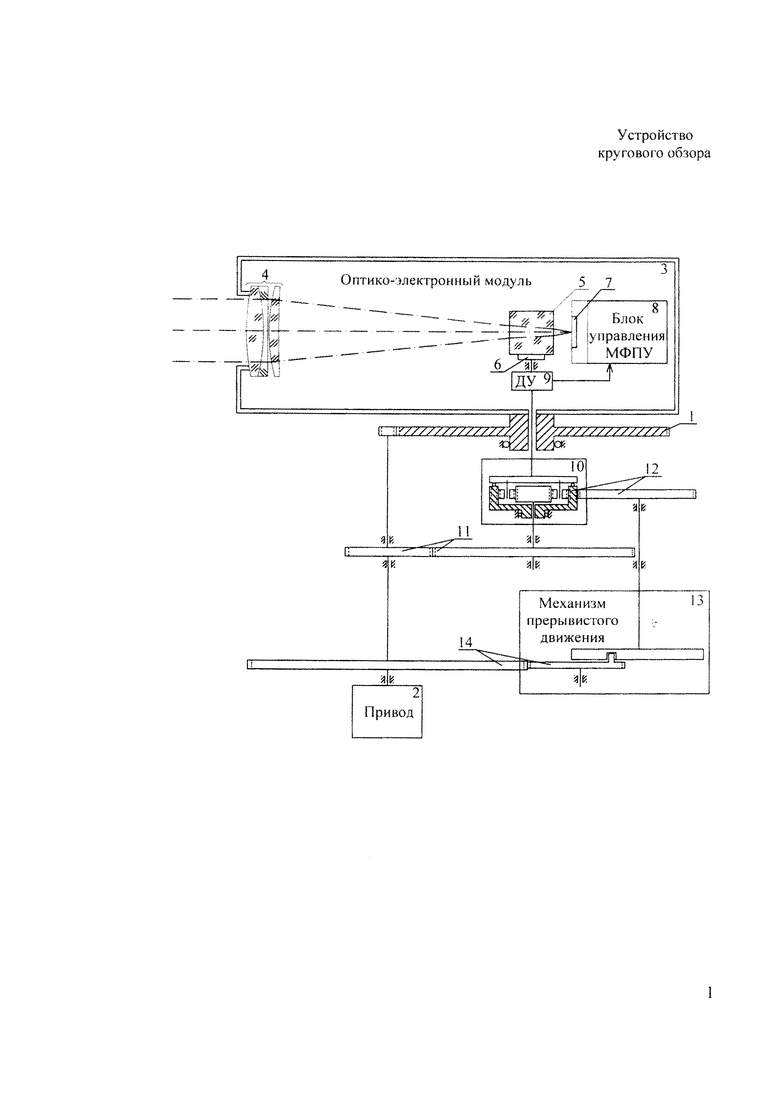
На чертеже схематично показано устройство кругового обзора.
Предлагаемое устройство кругового обзора содержит сканирующую платформу 1 (СП) с приводом 2. На СП 1 закреплен оптико-электронный модуль 3 (ОЭМ), который содержит объектив 4, оптический компенсатор 5, выполненный в виде оптической призмы и установленный на поворотной платформе 6, матричное фотоприемное устройство 7 (МФПУ) с блоком управления МФПУ 8 (БУМФПУ) и датчик углового положения 9 (ДУ) оптического компенсатора 5. Выход ДУ 9 подключен к входу синхронизации БУМФПУ 8.
Ось поворотной платформы 6 жестко соединена с выходной осью дифференциального устройства 10, один вход которого соединен через передачу 11 с приводом 2, а другой вход через передачу 12 - с выходом механизма прерывистого движения 13. Вход механизма прерывистого движения 13 соединен через передачу 14 с приводом 2.
В общем случае оптическая призма может иметь любое четное число граней. Для простоты изложения работа рассматривается для устройства, в котором оптический компенсатор выполнен в виде четырехгранной оптической призмы, дифференциальное устройство 10 выполнено в виде планетарного механизма, механизм прерывистого движения 13 выполнен в виде мальтийского механизма, а период кадровой развертки равен 0,04 с. Периоды поворота призмы 5 и механизма прерывистого движения 13 должны быть равны периоду кадровой развертки МФПУ 7.
Рассмотрение работы устройства ведется с момента, когда призма 5 находится в начале зоны рабочих углов - минус 15° от оптической оси объектива 4 оптико-электронного модуля 3.
Объектив 4 через оптическую призму 5 формирует оптическое изображение наблюдаемого пространства на фоточувствительной поверхности МФПУ 7. Привод 2 приводит в равномерное вращение азимутальную платформу 1 с размещенным на ней оптико-электронным модулем 3. Одновременно через передачу 11 и планетарный механизм 10 привод 2 вращает поворотную платформу 6 с закрепленной на ней оптической призмой 5. Для компенсации сдвига изображения на фоточувствительной поверхности МФПУ 7 угловая скорость призмы и угловая скорость сканирования должны быть связаны соотношением (патент РФ №2445644):

где - ωп угловая скорость призмы 5,
ωск - угловая скорость сканирования ОЭМ 3,
β - азимутальное поле зрения МФПУ 7,
N - число граней призмы (в рассматриваемом случае равно четырем).
В момент начала зоны рабочих углов призмы 5 ДУ 9 выдает на БУМФПУ 8 синхроимпульс, разрешающий открытие электронного затвора МФПУ 7, т.е. выдает разрешение на экспонирование изображения наблюдаемого пространства.
При достижении конца зоны рабочих углов призмы 5 ДУ 9 выдает на БУМФПУ 8 синхроимпульс, закрывающий электронный затвор МФПУ 7. Одновременно с концом зоны рабочих углов призмы 5 начинается поворот оси мальтийского механизма 13, который через передачу 12 передается на второй вход планетарного механизма 10. Скорости поворота с двух входов планетарного механизма 10 суммируются. Происходит ускоренный поворот призмы 5 до начального положения.
Таким образом, рабочий поворот призмы 5 (на 30°) происходит в течение 3/4 времени кадра, т.е. 0,03 с, а ускоренный поворот (на 60°) в оставшиеся 0,01 с. По сравнению с прототипом, обеспечивающим время экспонирования равное одной трети периода кадровой развертки, предлагаемое устройство обеспечивает время экспонирования равное трем четвертям периода кадровой развертки, что в 2,25 раза больше.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СКАНИРОВАНИЯ И СЛЕЖЕНИЯ | 2017 |
|
RU2645733C1 |
| СПОСОБ КРУГОВОГО ОБЗОРА МАТРИЧНЫМ ФОТОПРИЕМНЫМ УСТРОЙСТВОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445644C2 |
| УСТРОЙСТВО СКАНИРОВАНИЯ И СТАБИЛИЗАЦИИ ОПТИЧЕСКОГО ИЗОБРАЖЕНИЯ | 2011 |
|
RU2471211C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ | 2011 |
|
RU2457504C1 |
| ТЕПЛОПЕЛЕНГАТОР | 2016 |
|
RU2604959C1 |
| ТЕПЛОПЕЛЕНГАТОР | 2011 |
|
RU2458356C1 |
| СПОСОБ И УСТРОЙСТВО ОПТИЧЕСКОЙ ЛОКАЦИИ | 2014 |
|
RU2562391C1 |
| Оптико-электронный комплекс для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов | 2020 |
|
RU2760298C1 |
| ПРИБОР ПАНОРАМНЫЙ | 2018 |
|
RU2708535C1 |
| СПОСОБ ОПТИЧЕСКОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2554108C1 |
Изобретение относится к области оптико-электронного приборостроения и может быть использовано для обнаружения и видеорегистрации воздушных и наземных объектов, а также в области активной и пассивной локации. Достигаемый технический результат – увеличение времени экспонирования наблюдаемого пространства. Указанный результат достигается за счет того, что устройство кругового обзора содержит азимутальную платформу с приводом и датчиком угла, на которой размещены оптико-электронные приборы и тепловизоры, обеспечивающие круговой обзор и видеорегистрацию воздушных и наземных объектов, а также приборы активной и пассивной локации при непрерывном круговом обзоре с увеличенным временем экспонирования наблюдаемого пространства, при этом увеличение времени экспонирования достигается путем ускоренного перемещения призмы оптического компенсатора в начало зоны рабочих углов с помощью механизма прерывистого движения, выполненного, например, в виде мальтийского механизма и дифференциального устройства в виде планетарного механизма, причем начало и конец экспонирования изображения наблюдаемого пространства синхронизируется с началом и концом зоны рабочих углов оптического компенсатора. 2 з.п. ф-лы, 1 ил.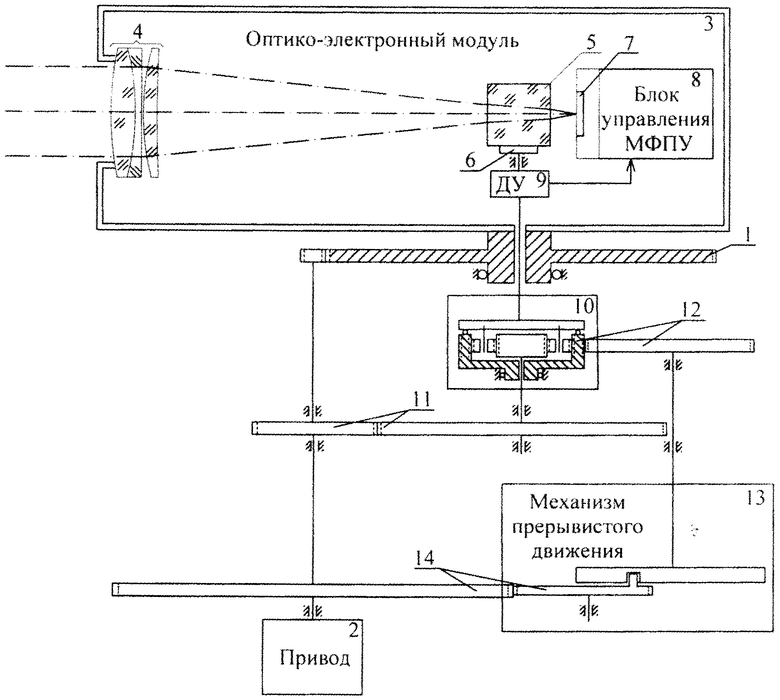
1. Устройство кругового обзора, содержащее азимутальную платформу с приводом; оптико-электронный модуль, установленный на азимутальную платформу и содержащий объектив, оптический компенсатор, установленный на поворотную платформу, снабженную датчиком углового положения оптического компенсатора; матричное фотоприемное устройство (МФПУ), установленное в фокальной плоскости объектива и снабженное блоком формирования телевизионного сигнала, к входу кадровой развертки которого подключен выход датчика углового положения оптического компенсатора, отличающееся тем, что в него введены механизм прерывистого движения, соединенный через механическую передачу с приводом, и механическое дифференциальное устройство, соединенное своим первым входом через механическую передачу с приводом, вторым входом - с выходом механизма прерывистого движения, а выход механического дифференциального устройства жестко соединен с осью поворотной платформы.
2. Устройство по п. 1, отличающееся тем, что сканирование азимутальной платформы, вращение оптического компенсатора и повороты механизма прерывистого движения, а также работа электронного затвора МФПУ жестко синхронизированы между собой, причем начало зоны рабочих углов оптического компенсатора совпадает во времени с началом экспонирования изображения наблюдаемого пространства и концом поворота механизма прерывистого движения, а конец зоны рабочих углов призмы - с концом экспонирования изображения наблюдаемого пространства и началом поворота механизма прерывистого движения.
3. Устройство по п. 1 или 2, отличающееся тем, что механизм прерывистого движения выполнен в виде мальтийского механизма, механическое дифференциальное устройство выполнено на базе планетарного механизма, а оптический компенсатор выполнен в виде оптической призмы с четным числом граней.
| СПОСОБ КРУГОВОГО ОБЗОРА МАТРИЧНЫМ ФОТОПРИЕМНЫМ УСТРОЙСТВОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445644C2 |
| ОПТИКО-ПЕЛЕНГАЦИОННАЯ СИСТЕМА КРУГОВОГО ОБЗОРА | 2007 |
|
RU2356063C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО КРУГОВОГО ОБЗОРА | 2006 |
|
RU2321016C1 |
| ШИРОКОПОЛЬНАЯ ИНФРАКРАСНАЯ СИСТЕМА КРУГОВОГО ОБЗОРА | 2001 |
|
RU2189049C1 |
| US 7022962 B2, 04.04.2006 | |||
| US 6031605 A, (HSIG), 29.02.2000 | |||
| WO 2016018508 A2, 04.02.2016. | |||

