Изобретение относится к области систем вооружения, а более конкретно к оптико-пеленгационным системам кругового обзора, обеспечивающим обнаружение, сопровождение, обработку координат различных наземных, наводных и воздушных целей, а также наведение на эти цели средства вооружения. Изобретение может найти применение в зенитных ракетных и зенитных пушечно-ракетных комплексах, противотанковых ракетных комплексах, в прицельных авиационных комплексах, а также в составе комплексов вооружения боевых кораблей.
В состав оптико-пеленгационных систем обычно входят следующие подсистемы: оптико-механический тракт, фотоприемное устройство (ФПУ) и электронный блок обработки информации. Поскольку для всех оптико-пеленгационных систем обязателен секторный или круговой обзор, то принципиально возможны две структуры оптического поста. В первом варианте круговой обзор осуществляется оптическим шарниром, а ФПУ находится на неподвижной части поста. Во втором варианте круговой обзор осуществляется механическим поворотом объектива с фотоприемным устройством, а информация с подвижного ФПУ передается на неподвижную часть поста через вращающийся узел передачи информации.
Оба варианта имеют свои достоинства и недостатки и в настоящее время ни один из них не получил окончательного предпочтения. В первом случае обеспечивается минимальная масса сканирующих частей поста и удобное, неподвижное расположение ФПУ. Однако сканирование оптическим шарниром приводит к вращению изображения на ФПУ, поэтому в оптический тракт приходится вводить каскад компенсаций этого вращения, что вызывает массу проблем: дополнительные потери прозрачности тракта, ухудшение качества изображения, появление синхронных приводов вращения компенсирующего каскада и т.д. Во втором случае тракт состоит, как правило, из одного объектива, характеристики которого и по светосиле, и по прозрачности, и по качеству изображения могут быть предельно высокими, однако ФПУ оказывается на подвижной части поста. Это вызывает необходимость усложнения узла перевода информации с подвижной части на неподвижную с пропускной способностью гигабитного уровня [В.Линьков и др. Локационные системы оптического диапазона комплексов ПВО надводных кораблей ВМС иностранных государств «Зарубежное военное обозрение» №7 / 2000 г.].
Наиболее близкой по технической сущности, достигаемому результату и взятой за прототип является оптико-пеленгационная система кругового обзора, включающая оптико-электронный блок электронного сканирования пространства, имеющий восемь оптико-электронных каналов электронного сканирования, объективы которых равномерно расположены на окружности с радиальным расположением их оптических осей, причем поля обзора этих объективов перекрывают сканируемое пространство в азимутальной плоскости без пропусков. Оптико-пеленгационная система содержит также, по крайней мере, один опорный слой ("шлейф") сформированных в ней проводящих каналов. Шлейфы проводящих каналов проходят внутри каждой ИК-матрицы к сердечнику внутри круговой структуры ИК-матриц. На сердечнике расположена схема распределения сигналов таким образом, что сигналы с выходов ИК-матриц передаются к схеме обработки сигналов
[Патент США №5464979].
Система особенно эффективна при использовании в тактических боевых условиях.
Недостатком прототипа является невысокая точность определения азимутальных и угломестных координат цели по ее точечному изображению на экране монитора вследствие неизбежной необходимости использования объективов с широким полем зрения при круговом обзоре наблюдаемого пространства.
Техническим результатом изобретения является повышение точности определения азимутальных и угломестных координат цели по ее изображению на экране монитора.
Технический результат достигается тем, что оптико-пеленгационная система кругового обзора включает оптико-электронный блок электронного сканирования пространства, имеющий N оптико-электронных каналов электронного сканирования, объективы которых равномерно расположены в азимутальной плоскости на окружности с радиальным расположением их оптических осей, причем поля обзора этих объективов перекрывают сканируемое пространство в азимутальной плоскости без пропусков.
Согласно изобретению оптико-пеленгационная система кругового обзора дополнительно включает оптико-электронный канал механического сканирования пространства, оптическая ось объектива которого проходит перпендикулярно азимутальной плоскости через центр окружности, на которой расположены объективы оптико-электронных каналов электронного сканирования, при этом оптико-электронный канал механического сканирования включает также поворотное зеркало, расположенное перед его объективом на оптической оси этого объектива под углом к ней и выполненное с возможностью поворота как по азимуту, так и по углу места. Кроме того, объективы оптико-электронных каналов электронного сканирования выполнены как объективы широкого поля зрения, а объектив оптико-электронного канала механического сканирования выполнен как объектив узкого поля зрения.
Оптико-пеленгационная система кругового обзора может включать светодальномерный канал.
Рабочим диапазоном оптико-электронных каналов электронного сканирования может являться диапазон 8-12 мкм, а рабочим диапазоном оптико-электронного канала механического сканирования может являться диапазон 3-5 мкм.
Изобретение иллюстрируется чертежом, на котором изображена конструктивная схема оптико-пеленгационной системы кругового обзора.
Оптико-пеленгационная система кругового обзора включает оптико-электронный блок электронного сканирования 1, оптико-электронный канал механического сканирования 2, платформу 3 для размещения оптико-электронного блока электронного сканирования 1 и оптико-электронного канала механического сканирования 2 и блок управления 4.
Оптико-электронный блок электронного сканирования 1 имеет восемь оптико-электронных каналов электронного сканирования 5.
В состав оптико-электронного канала электронного сканирования 5 входят следующие подсистемы: объектив 6, фотоприемное устройство 7 и электронный блок обработки информации 8. Оптико-электронные каналы электронного сканирования 5 работают в инфракрасном диапазоне 8-12 мкм.
Объективы 6 оптико-электронных каналов электронного сканирования 5 равномерно расположены в азимутальной плоскости на окружности с радиальным расположением их оптических осей. Поля обзора этих объективов перекрывают сканируемое пространство в азимутальной плоскости без пропусков, т.е. границы полей зрения соседних оптико-электронных каналов электронного сканирования 5 стыкуются. Объективы 6 оптико-электронных каналов электронного сканирования выполнены как объективы широкого поля зрения.
Оптико-электронный канал механического сканирования 2 включает объектив 9, фотоприемное устройство 10, электронный блок обработки информации 11, а также сканирующее зеркало 12 с двухкоординатным приводом 13, расположенное на оптической оси объектива 9 под углом к ней и выполненное с возможностью поворота как по азимуту, так и по углу места. Рабочим диапазоном оптико-электронного канала механического сканирования 2 является инфракрасный диапазон 3-5 мкм. Объектив 9 оптико-электронного канала механического сканирования выполнен как объектив узкого поля зрения.
Оптико-электронный канал механического сканирования 2 расположен таким образом, что оптическая ось объектива 9 оптико-электронного канала механического сканирования 2 проходит перпендикулярно азимутальной плоскости через центр окружности, на которой расположены объективы 6 оптико-электронных каналов электронного сканирования 5.
Оптико-пеленгационная система кругового обзора включает лазерный дальномер 14 с полупрозрачным зеркалом 15.
Блок управления 4 включает компьютер 16, монитор 17, клавиатуру 18, GPS-приемник 19 и передатчик 20.
Платформа 3 выполнена с возможностью регулировки ее положения в горизонтальной плоскости.
Оптико-пеленгационная система кругового обзора работает следующим образом. После установки на позиции оптико-пеленгационная система кругового обзора выравнивается с помощью платформы 3 в горизонтальной плоскости, а затем с помощью GPS-приемника 19 определяются ее географические координаты. После завершения процесса привязки системы к местности включаются оптико-электронный блок электронного сканирования 1 и оптико-электронный канал механического сканирования 2, причем при подаче питания происходит автоматическая калибровка всех каналов.
В режиме «Обзор» в оптико-электронных каналах электронного сканирования 5 объективы 6 создают на фотоприемных устройствах 7 изображения предметов соответствующих секторов наблюдаемого пространства. Электронные блоки обработки информации 8 формируют локальные видеостраницы наблюдаемого пространства.
Сигналы о локальных видеостраницах каждого из восьми каналов оптико-электронного блока электронного сканирования 1 подаются на вход компьютера 16 для накопления и «сшивания» границ локальных кадров для получения полного кадра обзора.
Отметим, что в режиме «Обзор» информация каналов широкого поля воспроизводится в реальном времени по мере поступления обработанной видеоинформации; при этом локальные кадры не воспроизводятся, последовательно воспроизводится лишь полный кадр.
В режиме «Обзор» оператор наблюдает изображение окружающей обстановки посредством монитора в реальном времени в ИК спектральном диапазоне (8…12,5 мкм). Изображение черно-белое или псевдоцветное с представлением фоновой обстановки в виде одной из компонент (G или В) телевизионного сигнала, а сигнал от цели - в виде R компоненты этого сигнала. Фоновая обстановка может содержать как неподвижные объекты ландшафта, так и слабо движущиеся объекты. Неподвижные объекты могут отображаться, например, в виде G компоненты, а слабо движущиеся объекты (например, облака) - в виде В компоненты цветного телевизионного сигнала. Такое спектральное разделение объектов по скорости их углового смещения позволит уверенней и дальше обнаруживать цель в условиях сложной фоновой обстановки.
При превышении сигналом порогового уровня на каком-либо участке одного из восьми секторов обзора на этот участок автоматически набрасывается строб и подается звуковой сигнал оператору о наличии цели, а на мониторе оператора отображается сектор обзора, в котором обнаружена цель.
По координатам цели на поверхности фотоприемного устройства 7 определяются угловые координаты цели в геофизической системе координат. По этим данным вычисляются и устанавливаются угловые координаты поворотного зеркала 12 узкопольного канала. С помощью двухкоординатного привода 13 поворотное зеркало 12 поворачивается таким образом, что цель попадает в поле обзора оптико-электронного канала механического сканирования 2. Изображение цели с помощью объектива 9 формируется на фотоприемном устройстве 10. Электронный блок обработки информации 11 формирует видеостраницу узкого поля зрения (увеличенного масштаба) наблюдаемого пространства. Видеостраница наблюдаемого пространства с изображением цели в увеличенном масштабе передается на компьютер 16 и воспроизводится на мониторе 17, при этом дальность до цели с помощью полупрозрачного зеркала 15 определяет лазерный дальномер 14. Оператор наблюдает изображение окружающей обстановки посредством монитора 17 в реальном времени в ПК спектральном диапазоне 3-5 мкм.
Оператор анализирует увеличенное изображение цели, уточняет азимутальные и угломестные координаты цели и при необходимости информация о координатах цели с помощью передатчика 20 передается на средства уничтожения.
Таким образом, из вышеизложенного подтверждается возможность достижения заявленного в изобретении технического результата, а именно, повышение точности определения азимутальных и угломестных координат цели по ее изображению на экране монитора.
Следует отметить, что хотя в описании изобретения был представлен и проиллюстрирован только предпочтительный вариант выполнения изобретения, в конструкцию могут быть внесены различные модификации и изменения, не затрагивающие существа и объема изобретения, определяемого формулой изобретения.
Промышленная применимость изобретения определяется тем, что предлагаемая оптико-пеленгационная система кругового обзора может быть изготовлена в соответствии с предлагаемым описанием и чертежами на основе известных комплектующих изделий при использовании современного технологического оборудования и использована по прямому назначению.
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптико-пеленгационная система кругового обзора | 2020 |
|
RU2748872C1 |
| УСТРОЙСТВО СКАНИРОВАНИЯ И СЛЕЖЕНИЯ | 2017 |
|
RU2645733C1 |
| СПОСОБ ОПТИЧЕСКОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2554108C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2016 |
|
RU2639321C1 |
| СПОСОБ И УСТРОЙСТВО ОПТИЧЕСКОЙ ЛОКАЦИИ | 2014 |
|
RU2562391C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 2008 |
|
RU2396573C2 |
| Оптико-электронный комплекс для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов | 2020 |
|
RU2760298C1 |
| СПОСОБ И УСТРОЙСТВО АЗИМУТАЛЬНО-УГЛОМЕСТНОЙ ИНДИКАЦИИ В ОПТИКО-ЛОКАЦИОННЫХ СИСТЕМАХ | 2015 |
|
RU2628301C2 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ | 2011 |
|
RU2457504C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ЛОКАТОР | 2014 |
|
RU2562750C1 |
Изобретение относится к оптико-пеленгационным системам кругового обзора, обеспечивающим обнаружение, сопровождение, обработку координат различных наземных, наводных и воздушных целей, а также наведение на эти цели средства вооружения. Достигаемым техническим результатом изобретения является повышение точности определения азимутальных и угломестных координат цели по ее изображению на экране монитора. Указанный результат достигается тем, что оптико-пеленгационная система кругового обзора включает оптико-электронный блок электронного сканирования пространства, имеющий N оптико-электронных каналов электронного сканирования, объективы которых равномерно расположены в азимутальной плоскости на окружности с радиальным расположением их оптических осей. Поля обзора этих объективов перекрывают сканируемое пространство в азимутальной плоскости без пропусков. Система дополнительно включает оптико-электронный канал механического сканирования пространства, оптическая ось объектива которого проходит перпендикулярно азимутальной плоскости через центр окружности, на которой расположены объективы оптико-электронных каналов электронного сканирования. Оптико-электронный канал механического сканирования включает поворотное зеркало, расположенное на оптической оси его объектива под углом к ней и выполненное с возможностью поворота как по азимуту, так и по углу места. Объективы оптико-электронных каналов электронного сканирования выполнены как объективы широкого поля зрения, а объектив оптико-электронного канала механического сканирования выполнен как объектив узкого поля зрения. 2 з.п. ф-лы, 1 ил.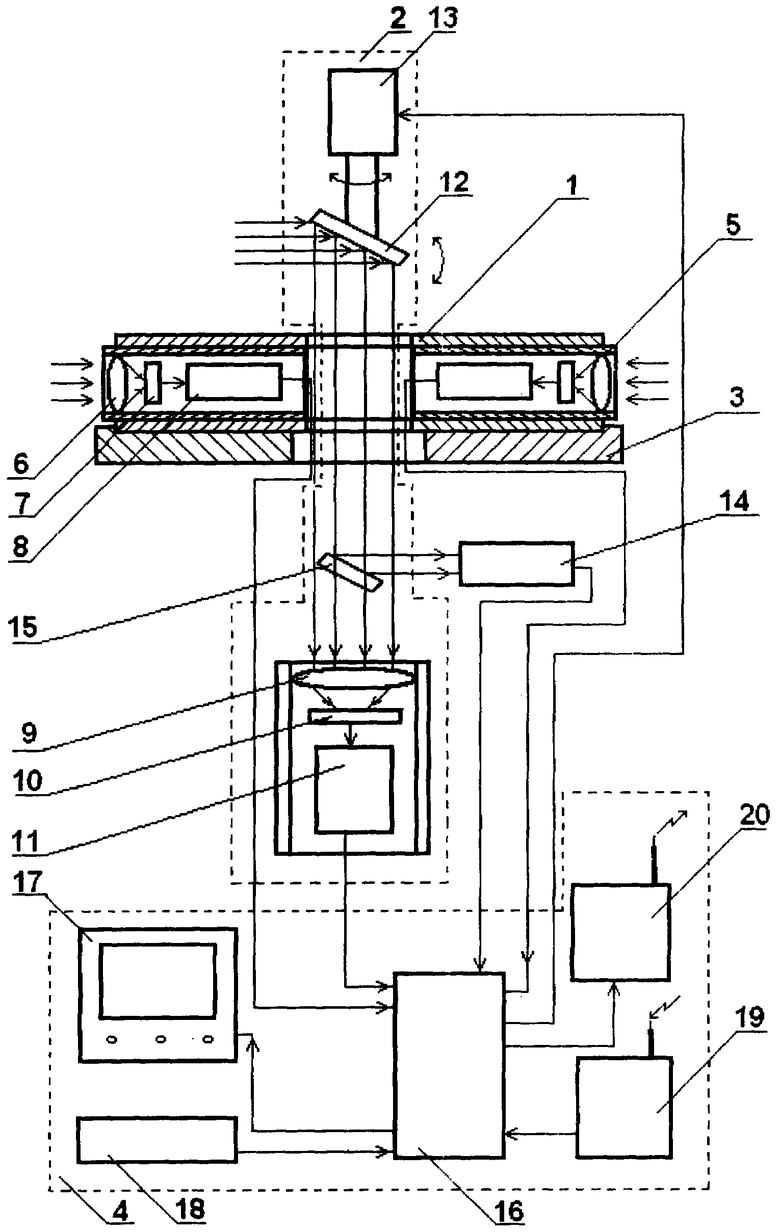
1. Оптико-пеленгационная система кругового обзора, включающая оптико-электронный блок электронного сканирования пространства, имеющий N оптико-электронных каналов электронного сканирования, объективы которых равномерно расположены в азимутальной плоскости на окружности с радиальным расположением их оптических осей, причем поля обзора этих объективов перекрывают сканируемое пространство в азимутальной плоскости без пропусков, отличающаяся тем, что оптико-пеленгационная система кругового обзора дополнительно содержит оптико-электронный канал механического сканирования пространства, предназначенный для наблюдения за целью, обнаруженной в полном кадре обзора, сформированном по локальным кадрам оптико-электронных каналов электронного сканирования, при этом оптическая ось объектива оптико-электронного канала механического сканирования проходит перпендикулярно азимутальной плоскости через центр окружности, на которой расположены объективы оптико-электронных каналов электронного сканирования, при этом оптико-электронный канал механического сканирования включает также плоское зеркало, расположенное перед его объективом на оптической оси этого объектива под углом к ней и выполненное с возможностью поворота как по азимуту, так и по углу места, кроме того, объективы оптико-электронных каналов электронного сканирования выполнены как объективы широкого поля зрения, а объектив оптико-электронного канала механического сканирования выполнен как объектив узкого поля зрения.
2. Оптико-пеленгационная система кругового обзора по п.1, отличающаяся тем, что она включает светодальномерный канал, управляемый в соответствии с наблюдением за целью в поле обзора оптико-электронного канала механического сканирования.
3. Оптико-пеленгационная система кругового обзора по п.1, отличающаяся тем, что рабочим диапазоном оптико-электронных каналов электронного сканирования является диапазон 8-12 мкм, а рабочим диапазоном оптико-электронного канала механического сканирования является диапазон 3-5 мкм.
| US 5464979 А, 07.11.1995 | |||
| ОПТИКО-ЭЛЕКТРОННОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО | 2005 |
|
RU2304792C1 |
| СКАНИРУЮЩЕЕ УСТРОЙСТВО КРУГОВОГО ОБЗОРА | 2004 |
|
RU2271553C2 |
| ВРАЩАЮЩЕЕСЯ СКАНИРУЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2183344C1 |
| US 4902128, 20.02.1990 | |||
| US 6014129 A, 11.01.2000 | |||
| US 6031605 A, 29.02.2000. | |||

