Изобретение относится к сельскому хозяйству, в частности к технологиям и автоматизированным устройствам регулирования технологических процессов производства агропродукции в растениеводстве (включая агрохимию и почвоведение), сопровождения мелиоративного строительства, а также наблюдения и контроля уборки урожая.
Известно устройство [1], включающее как минимум один наземный агрегат, предназначенный для активного и/или пассивного видеомониторинга стеблевой части растений, а также беспилотный летательный аппарат (дрон), предназначенный для активного и/или пассивного аэровидеомониторинга поля, и связанные с ними посредством радиосвязи или также с использованием внешней сети напрямую с каждым или опосредовано через упомянутые аппарат либо агрегат компьютер, либо монитор, на которые передается соответствующая мониторингу растений и поля информация. При этом упомянутый агрегат включает, как минимум, одного способного перемещаться по поверхности земли наземного робота, при этом робот предназначен для активного и/или пассивного видеомониторинга корневой системы растений, для чего робот включает рабочий орган, выполненный с возможностью вынимания корневой системы растения из земли.
К недостаткам данного изобретения следует отнести малое время автономной работы дрона и сложность устройств для его подзарядки.
Наиболее близким к заявляемому объекту является устройство, которое содержит первый блок искусственного зрения, размещенный на мобильном средстве, и блок обработки видеосигнала. В устройство включены беспилотный летательный аппарат (БПЛА), второй блок искусственного зрения, два блока передачи-приема данных, блок тестирования и управления, блок ориентации в трехмерных координатах. Непилотируемый летательный аппарат имеет возможность двигаться в пределах возделываемого угодья. Первый блок приема-передачи данных, блок встроенного тестирования и управления, блок ориентации в трехмерных координатах установлены на наземном мобильном средстве. Второй блок искусственного зрения и второй блок приема-передачи данных размещены на непилотируемом летательном аппарате. Выход второго блока искусственного зрения соединен с входом второго блока приема-передачи данных. Выход первого блока приема-передачи данных соединен с первым входом блока встроенного тестирования и управления. Выход блока ориентации в трехмерных координатах соединен со вторым входом блока встроенного тестирования и управления [2].
К недостаткам данного изобретения следует отнести ограниченное время работы БПЛА, низкую полезную нагрузку, поднимаемую на борт аппарата, а также сравнительно большое время мониторинга обрабатываемой или оцениваемой площади одиночным БПЛА.
Предполагаемое изобретение направлено на повышение эффективности технологических процессов производства агропродукции в растениеводстве, сопровождения мелиоративного строительства и наблюдения и контроля уборки урожая за счет повышения как количества БПЛА (дронов), так и времени их непрерывного функционирования при выполнении сельскохозяйственных работ.
Технический результат достигается тем, что мобильный агрегат имеет неразрывные гибкие связи с несколькими дронами одновременно, обеспечивая посредством них их двигатели питанием, а дроны - полезной нагрузкой, причем источники топлива (топливо) и полезная нагрузка размещены на наземной части мобильного агрегата, при этом процесс управления дронами осуществляется по проводной или беспроводной связи и содержит блоки, включающие оценку и контроль положения дронов в пространстве, распознавание и оценку состояния посевов, растений, почвы, а также принятие решения о необходимости внесения пестицидов, гербицидов, удобрений и их дозе. Причем в транспортном или нерабочем положении дроны заневолены в горизонтальной и вертикальной плоскостях на крыше мобильного агрегата за счет электромагнитного поля, источники которого расположены в его крыше, положение же дронов при их работе ограничивается трехмерной зоной (вверх-вниз и вправо-влево) с невозможностью приблизиться в горизонтальной плоскости - к границе зоны работы соседнего дрона на расстояние, меньшее диаметра винтов дрона или его максимальными наружными размерами (в том числе по всем возможным размерам дрона, включая его диагонали), а в вертикальной - ограничивается длиной гибких связей и/или расстоянием от поверхности почвы до нижней поверхности дрона. Внесение пестицидов, гербицидов, удобрений производится распылителями дронов путем включения насосов, расположенных в соответствующих емкостях, а их доза формируется на основании сопоставления фото- и/или видеоизображения растений с картой (таблицей, матрицей) состояния растений, составленных почвоведами и агрохимиками с учетом особенностей данной климатической зоны.
Технический результат заключается в исключении зависимости дронов от источников питания и полезной нагрузки за счет их переноса на мобильный агрегат, а также повышении эффективности работы мобильного агрегата на поле вследствие увеличения количества дронов, выполняющих индивидуальную задачу или подзадачу, на которые разбита общая задача, поставленная для мобильного агрегата.
Отличительными признаками предлагаемого устройства является то, что с мобильным агрегатом гибкими связями соединены один или более дронов, каждый из которых может выполнять как узкоспециализированную задачу, так и одну общую, разбитую на подзадачи для каждого из них, при этом эта связь позволяет им перемещаться относительно транспортного средства - в пределах выделенной зоны для каждого - в трех измерениях. Кроме того, источники топлива для дронов и их полезная нагрузка находятся в соответствующих емкостях мобильного агрегата, а не располагаются на дронах.
Сущность: способ позволяет повысить скорость обработки полей сельскохозяйственного назначения вследствие разбиения общей поставленной задачи на подзадачи для каждого дрона с одновременным использованием всех или нескольких дронов, подвижно связанных с транспортным средством, а также эффективность - за счет исключения времени заправки (зарядки) и снятия ограничений, касающихся размещения на борту каждого из них полезной нагрузки (питательных веществ, пестицидов, гербицидов и пр.).
К достоинствам предлагаемого способа следует отнести:
1. время работы дронов ограничено только запасами топлива транспортного средства вследствие неразрывной связи с ним кабелем (дрон с электродвигателями) или топливопроводом (дрон с двигателем внутреннего сгорания);
2. время бесперебойной подачи необходимых средств к растениям ограничено только запасами этих средств на борту транспортного средства вследствие неразрывной связи с ним шлангом/шлангами;
3. увеличение грузоподъемности дронов вследствие отсутствия элементов питания или топливных баков;
4. снижение потребляемой мощности дронами за счет отсутствия элементов питания или топливных баков на борту;
5. одновременно могут работать как несколько дронов, так и отдельно взятый дрон;
6. несколько дронов могут одновременно работать на нескольких высотных уровнях;
7. возможна узкая специализация каждого из дронов, связанных с одним транспортным средством;
8. дроны могут осуществлять мониторинг состояния транспортного средства, к которому они подсоединены.
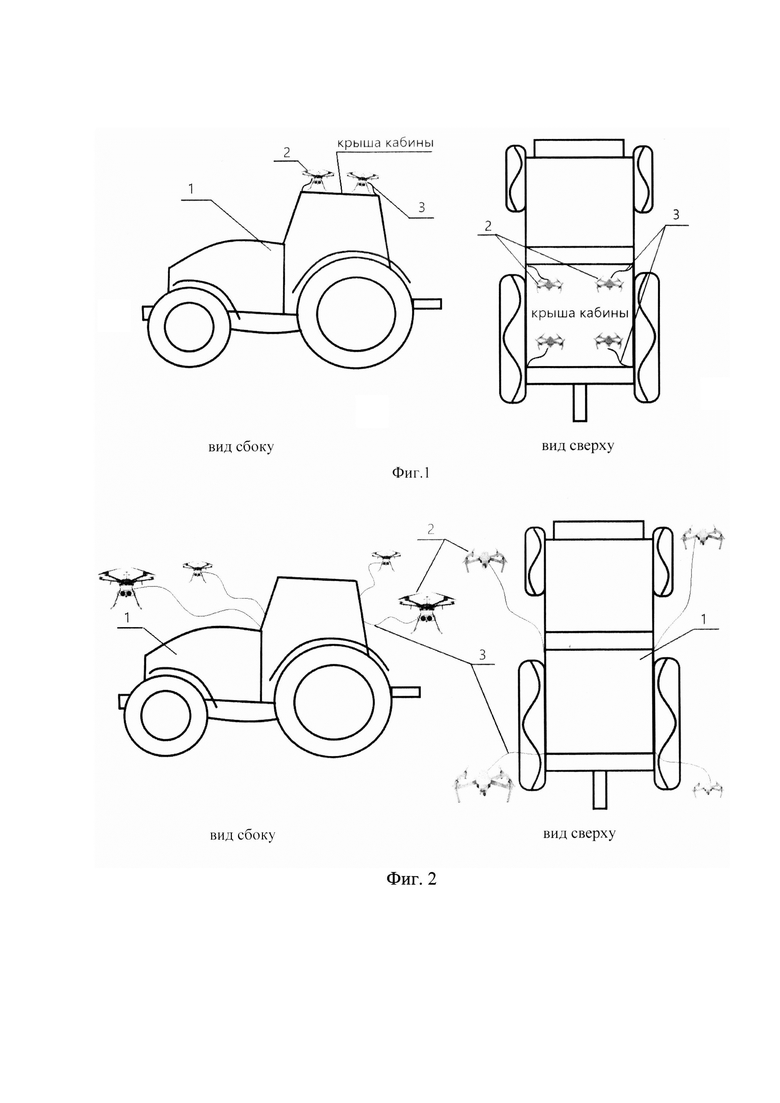
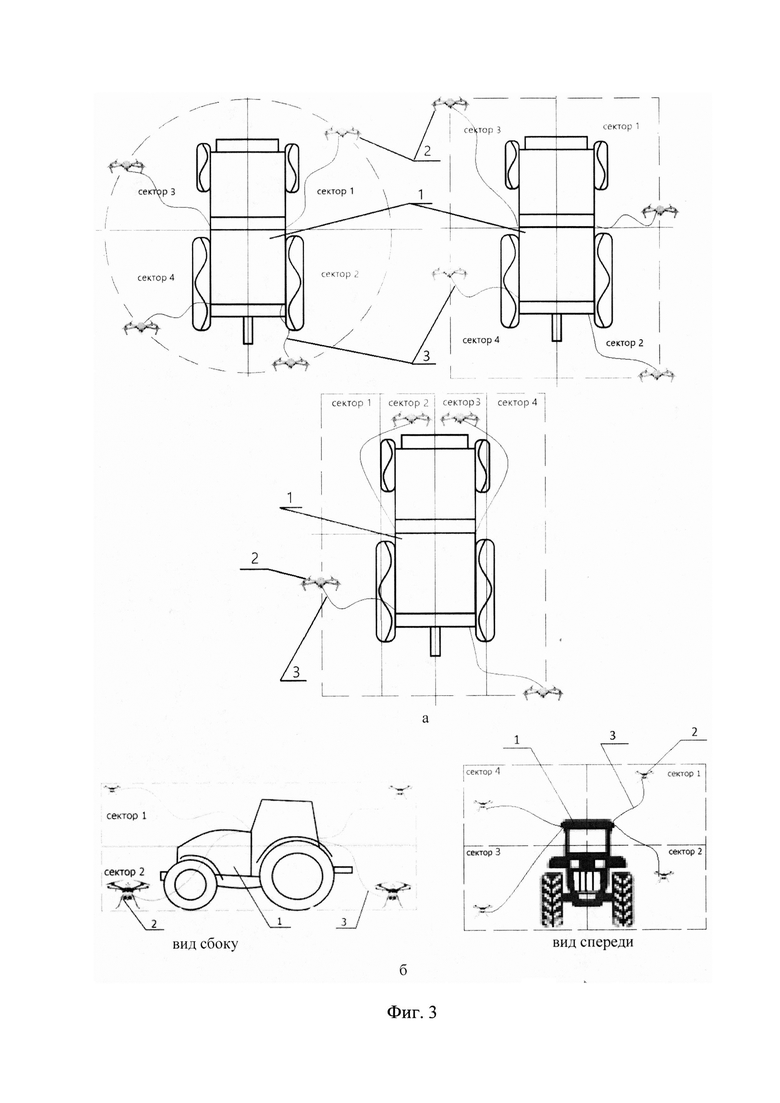
Изобретение поясняется прилагаемыми рисунками, где на фиг. 1 представлен вид сбоку и сверху транспортного средства (трактора) в транспортном положении (дроны закреплены на его крыше); на фиг. 2 - вид сбоку и сверху транспортного средства (трактора) в рабочем положении (дроны реализуют заложенный функционал); на фиг. 3 - вид сверху индивидуальных горизонтальных секторов, выделенных для каждого дрона, в том числе при различной форме обрабатываемых участков (а), вид сбоку и спереди индивидуальных вертикальных секторов, выделенных для каждого дрона (б); на фиг. 4 - вид сбоку мобильного агрегата с дроном и емкостью для внесения удобрений; на фиг. 5 - блоки управления непринятия решения, и вводятся следующие обозначения:
1 - транспортное средство (трактор);
2 - дрон (БПЛА);
3 - электрический кабель/топливопровод;
4 - емкость/емкости, установленные на прицепе;
5 - шланг подачи пестицидов, гербицидов, удобрений и пр.;
6 - компьютер с дисплеем;
7 - блок разбиения задачи на подзадачи;
8 - блок оценки и контроля положения дронов в пространстве;
9 - блок распознавания и оценки состояния посевов, растений, почвы и пр.;
10 - блок принятия решения о необходимости внесения пестицидов, гербицидов, удобрений и пр. и их дозе.
Способ может быть реализован с помощью устройства (фиг. 1), состоящего из транспортного средства 1, на крыше кабины которого размещены дроны 2, расположенные друг от друга на расстоянии большем, чем их максимальные геометрические размеры (включая размах винтов), и соединенные электрическими кабелями или топливопроводами 3, соответственно, с аккумулятором или топливным баком транспортного средства 1, при этом транспортное средство 1 сцеплено с прицепом, на котором размещена емкость 4 (фиг. 4), содержащая, например, жидкие пестициды, гербициды, удобрения и пр., которые посредством шланга 5 подаются насосом (не показан) емкости 4 на распылитель (не показан), установленный на дроне 2. В кабине транспортного средства 1 установлен компьютер с дисплеем 6, имеющим блок ввода задачи из имеющегося в компьютере стандартного перечня задач, выход которого соединен с входом блока 7 разбиения задачи на подзадачи, при этом выход блока 7 соединен с входом блока 8 оценки и контроля положения дронов 2 в пространстве, разбивающего обрабатываемый участок в пространстве для каждого из дронов 2 на непересекающиеся друг с другом зоны, и управляющим ими посредством проводной или беспроводной связи в пределах каждой из них. Кроме того, камера/камеры (не показаны) дронов 2 соединены с входом блока 9 распознавания и оценки состояния посевов, растений, почвы и пр., имеющего предустановленные карты (таблицы, матрицы и пр.), описывающие состояние растений и соответствующими их состоянию необходимой дозы, например, подкормки, составленных почвоведами и агрохимиками с учетом особенностей данной климатической зоны, при этом выход блока 9 связан с входом блока 10 принятия решения о необходимости внесения пестицидов, гербицидов, удобрений и пр. и их дозе, а его выход соединен с модулем управления насосом (не показаны) емкости 4.
Работа устройства, реализующего предлагаемый способ, осуществляется следующим образом. Дроны 2 в транспортном положении фиксируются на крыше транспортного средства 1, например, с использованием расположенных в крыше транспортного средства 1 - индивидуальных для каждого дрона 2 - электромагнитов (не показаны), во включенном состоянии притягивающих основания дронов 2, выполненных из магнитных материалов.
После въезда на обрабатываемое поле оператор транспортного средства 1 останавливает его и отключает питание электромагнитов, удерживающего дроны 2 на его крыше, одновременно с выключением питания электромагнитов на двигатели дронов 2 посредством электрического кабеля или топливопровода 3 подается питание от аккумулятора или топливного бака транспортного средства 1 (в зависимости от используемого типа двигателя дронов 2), при этом возможно комбинирование дронов 2 с различными типами двигателей на одном транспортном средстве 1. Далее оператор выбирает задачу на дисплее 6, соответствующую взлету одного или сразу нескольких дронов 2 (фиг. 2), которая передается с блока 6 на блок 7 и, далее, на блок 8, передающий посредством проводной или беспроводной связи команду на взлет дронам 2. Причем, если используются не все дроны 2, то после взлета задействованных в решении задачи, автоматически включается питание электромагнитов, притягивающих основания дронов 2, остающихся на крыше.
Рассмотрим случай внесения удобрений на поля сразу всеми имеющимися дронами 2 (фиг. 3), при этом транспортное средство 1 сцеплено с емкостью 4, соединенной шлангами 5 с дронами 2 (фиг. 4). Возможна комбинированная (комплексная) обработка полей за счет использования различных жидкостей из нескольких емкостей 4, установленных на одном прицепе, сцепленном с транспортным средством 1. В этом случае может использоваться как один шланг 5, через штуцеры соединенный с насосами емкостей 4, так и сразу несколько шлангов 5 - по одному на каждую емкость 4 расположенную на прицепе транспортного средства 1. При использовании одного шланга 5, связывающего емкости 4 и дрон 2, дозирование и его поочередное заполнение различными жидкостями из соответствующих емкостей 4 будет осуществляться их индивидуальными насосами (не показаны).
После взлета дронов 2 с крыши транспортного средства 1 оператор выбирает следующую операцию из имеющегося набора всех возможных операций, визуализируемых на дисплее 6, и активизирует ее нажатием соответствующей клавиши, например, сенсорно. Программное обеспечение блока 7 разбиения задачи на подзадачи проводит тестирование работы систем и устройств дронов 2, после чего формирует для каждого задействованного дрона 2 подзадачу, при этом часть дронов 2 может быть исключена из выполнения общей задачи, и им подана команда на посадку на крышу транспортного средства 1, где после посадки они будут заневолены от вертикальных и горизонтальных перемещений полем электромагнитов, расположенных в крыше транспортного средства 1.
Возможна и обратная процедура принятия решения, когда оператор сначала выбирает задачу, после чего программное обеспечение блока 7 разбиения задачи на подзадачи проводит тестирование работы систем и устройств дронов 2 и формирует - для определенного количества дронов 2 - подзадачи, после чего выдает команду на поднятие только их, предварительно отключив соответствующие электромагниты, расположенные в крыше транспортного средства 1. В этом случае тестирование работы систем и устройств производится только для находящихся в воздухе дронов 2.
Если при тестировании, проводимом блоком 7, какие-либо системы отдельного дрона 2, части из них или сразу всех работают неправильно, то автоматически подается команда на их посадку на крышу транспортного средства 1, включаются удерживающие электромагниты и осуществляется диагностика всех систем дронов 2 и системы управления ими. При невозможности устранить неполадки дистанционно вызывается экстренная служба или оператору транспортного средства 1 сообщается о необходимости вернуться в парк визуализацией сообщения на дисплее 6.
В случае положительного результата тестирования систем и устройств дронов 2 оператор транспортного средства 1 начинает его в движение по выбранному маршруту. После начала движения, находящиеся в воздухе дроны 2, приступают к выполнению своей подзадачи, при этом их положение задается в вертикальных и горизонтальных координатах блоком 8, который ограничивает выделенную каждому из них область трехмерной зоной (вверх-вниз и вправо-влево) с невозможностью приблизиться в горизонтальной плоскости - к границе выделенной области на расстояние, меньшее размера, охватываемого винтами дрона 2 или максимальными наружными размерами (в том числе, включая все возможные диагонали), а, в вертикальной - ограничивается длиной шланга 5 (вверх) и расстоянием от нижней плоскости дрона 2 до поверхности почвы (вниз). При этом блок 8 задает поэтапное (пошаговое) прохождение каждым дроном 2 выделенной ему области как в вертикальной, так и в горизонтальной плоскостях.
На каждом шаге в выделенной области камера/камеры дронов 2 передают в блок 9 распознавания и оценки состояния посевов, растений, почвы и пр. фото- и/или видеоматериалы, который производит действия по сопоставлению состояния растения/растений, присутствующих в зоне работы дрона 2, с картами (таблицами, матрицами и пр.) состояния растений и соответствующей им необходимой дозы, например, подкормки, составленных почвоведами и агрохимиками с учетом особенностей данной климатической зоны, и передает решение о необходимости (или ее отсутствии) внесения соответствующих веществ, например, непосредственно на поверхность почвы, где, предположительно, располагается зона корневой системы растения, фотоизображение (видеоизображение) которого идентифицировано как недополучившего достаточное количество минеральных (или других) веществ для его нормального роста на данном этапе развития (вегетации).
В случае необходимости внесения пестицидов, гербицидов, удобрений и пр. и определенной блоком 9 по картам (таблицам, матрицам и пр.) дозе блок 10 передает команду о включении соответствующих насосов, расположенных в емкостях 4, направляющих жидкость по шлангу/шлангам 5 к дрону 2, а распылитель, установленный на дроне 2 (не показан), вносит жидкость, подаваемую из соответствующей емкости 4, в зону корневой системы растения. После внесения соответствующей дозы дрон 2 переходит к диагностике состояния следующего растения или группы растений.
По окончании обработки поля оператор транспортного средства 1 выбирает на дисплее 6 команду, соответствующую данному этапу, при этом блок 7 выдает команду блоку 8 на возврат и автоматическую посадку дронов 2 на крышу транспортного средства 1 с последующей фиксацией их оснований индивидуальными электромагнитами, расположенными в крыше транспортного средства 1. После чего транспортное средство 1 готово к переезду на другое поле или возвращению в парк.
Фиксация дронов 2 при выключении двигателя, отключении аккумулятора, питающего электромагниты крыши, или поломке транспортного средства 1 может осуществляться, например, вручную - за счет одного или нескольких дополнительных фиксаторов (механических, резиновых и др.), закрепленных на крыше, и заневоливающих дроны 2 относительно нее.
Таким образом, предлагаемое устройство выполняет роль произвольно перемещаемой подвижной системы с упорядоченным или хаотичным движением нескольких дронов относительно транспортного средства, связанных с ним кабелями-шлангами, что позволяет обрабатывать любые формы участков в пределах досягаемости этих кабель-шлангов.
Источники информации
1. Патент №2648696 МПК G01N 35/10, G06F 7/00, A01G 2/00. Агротехнический комплекс с беспилотным летательным аппаратом / Гаврилов Н.А., заявка 2017117895, заявл. 23.05.2017, опубл. 28.03.2018, Бюл. №10.
2. Патент №2471338 МПК A01G 7/00, А01В 79/00, A01D 91/00, G06F 7/00. Устройство позиционирования мобильных агрегатов при возделывании агрокультур / Башилов A.M., Королев В.А., Головко В.А., Суляев С.А., Башилов С.А., Евдокимов П.Б., заявка 2010107548/13, заявл. 02.03.2010, опубл. 10.01.2013 Бюл. №1.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ОБСЛУЖИВАНИЯ АГРОДРОНОВ | 2023 |
|
RU2805897C1 |
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| Машина для дифференцированного внесения пестицидов, жидких минеральных удобрений и других агрохимикатов | 2020 |
|
RU2748996C1 |
| Мобильный агрегат | 2024 |
|
RU2831051C1 |
| Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии | 2019 |
|
RU2703198C1 |
| СПОСОБ МОСТОВОГО ОРОШАЕМОГО ЗЕМЛЕДЕЛИЯ С МИНИМАЛЬНОЙ ОБРАБОТКОЙ ПОЧВЫ И АГРОМОСТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2149530C1 |
| Беспилотный вертолет для внесения пестицидов, удобрений и других агрохимикатов в точном земледелии | 2021 |
|
RU2754790C1 |
| СИСТЕМА РАСПРЕДЕЛЕНИЯ ЖИДКИХ УДОБРЕНИЙ КОМБИНИРОВАННОГО АГРЕГАТА ДЛЯ ОБРАБОТКИ ПОЧВЫ И ВНЕСЕНИЯ ЖИДКИХ УДОБРЕНИЙ | 2008 |
|
RU2370932C1 |
| СПОСОБ И АГРЕГАТ ВОЗДЕЛЫВАНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР | 2009 |
|
RU2421978C2 |

Изобретение относится к сельскому хозяйству, в частности к транспортному средству, оборудованному дронами. Дроны установлены на крыше кабины транспортного средства. Дроны соединены эклектическим кабелем или топливопроводом с аккумулятором или топливным баком транспортного средств. Транспортное средство сцеплено с емкостью (или несколькими емкостями), содержащей жидкие пестициды, гербициды, удобрения, которые посредством шланга подаются насосом емкости на распылители, установленные на дронах. Управление дронами осуществляется на начальном этапе оператором путем выбора операции на дисплее. Затем программное обеспечение блока проводит тестирование работы систем и устройств дронов и формирует для каждого задействованного дрона свою задачу. Использование изобретения позволит повысить качество обработки сельскохозяйственных угодий любой формы в пределах досягаемости кабель-шлангов, сообщенных с дронами. 1 з.п. ф-лы, 5 ил.
1. Транспортное средство в виде трактора с прицепом, оборудованное дронами, причем прицеп снабжен емкостью, содержащей жидкие пестициды, гербициды и удобрения, характеризующееся тем, что дроны в транспортном или нерабочем положении застопорены в горизонтальной и вертикальной плоскостях на крыше транспортного средства за счет электромагнитного поля, источники которого расположены на его крыше, транспортное средство имеет неразрывные гибкие связи с несколькими дронами одновременно, обеспечивая посредством них двигатели дронов питанием, а сами дроны – полезной нагрузкой в виде возможности распыления пестицидов, гербицидов и удобрений за счет связи дронов посредством шланга с емкостью прицепа, причем источники топлива и полезная нагрузка размещены на наземной части транспортного средства, а положение дронов при их работе ограничивается трехмерной зоной вверх-вниз и вправо-влево с невозможностью приблизиться в горизонтальной плоскости к границе зоны работы соседнего дрона на расстояние, меньшее диаметра винтов дрона или максимальных наружных параметров дрона, включая его диагонали, а в вертикальной – ограничивается длиной гибких связей и/или расстоянием от поверхности почвы до нижней поверхности дрона, кроме того, процесс управления дронами осуществляется по проводной или беспроводной связи, а система управления содержит блоки, включающие оценку и контроль положения дронов в пространстве, распознавание и оценку состояния посевов, растений, почвы, а также принятия решения о необходимости внесения пестицидов, гербицидов, удобрений и их дозе.
2. Транспортное средство по п.1, отличающееся тем, что блок принятия решения о необходимости внесении пестицидов, гербицидов и удобрений определяет дозу их внесения на основании сопоставления фото и/или видеоизображений растений с картой состояния растений, составленной с учетом особенностей данной климатической зоны.
| УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ МОБИЛЬНЫХ АГРЕГАТОВ ПРИ ВОЗДЕЛЫВАНИИ АГРОКУЛЬТУР | 2010 |
|
RU2471338C2 |
| АГРОТЕХНИЧЕСКИЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2017 |
|
RU2648696C1 |
| СИСТЕМА ИНФОРМАЦИОННОГО ОБСЛУЖИВАНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО ПРЕДПРИЯТИЯ, ИСПОЛЬЗУЮЩЕГО ТЕХНОЛОГИЮ ТОЧНОГО ЗЕМЛЕДЕЛИЯ | 2004 |
|
RU2251240C1 |
| US 6199000 B1, 06.03.2001. | |||

