ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к измерениям глубины и, в частности, к способу многоточечной калибровки глубины направляющего устройства для горизонтально направленного бурения.
УРОВЕНЬ ТЕХНИКИ
Первоначально для измерения глубины зонда в направляющих устройствах использовали дипольный источник и две антенны.
R=d/((s1/s2)^1/3-1).
где s1 и s2 - интенсивности сигналов, переданных от передатчика и принятых соответственно двумя детекторными устройствами, имеющими одномерную антенну, a d- расстояние между двумя детекторными устройствами, имеющими одномерную антенну. Такой способ измерения глубины обычно имеет относительно большую погрешность.
В настоящее время используется способ одноточечной калибровки, позволяющий измерить значение М0, при известном расстоянии (k0), при этом глубина (r) вычисляется из следующего уравнения:
r=(M0/s)1/3,
где s - интенсивность сигнала, переданного от передатчика и принятого измерительным устройством. Такой способ позволяет более точно измерять глубину, однако, диапазон точного измерения весьма узок ввиду воздействия электрических полей и шумов окружающей среды. Точность уменьшается при достижении определенной глубины. С увеличением расстояния погрешность увеличивается.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Таким образом, основной задачей настоящего изобретения является преодоление известных недостатков, таких как погрешность и ограничение по глубине существующего способа измерения путем создания способа многоточечной калибровки глубины направляющего устройства для горизонтально направленного бурения.
Для решения вышеупомянутой задачи предлагается способ многоточечной калибровки глубины направляющего устройства для горизонтально направленного бурения, содержащий этапы, на которых:
(1) поддерживают выходной сигнал постоянной мощности передатчика средней мощности в специальных условиях электроснабжения;
(2) выбирают по меньшей мере две глубины для калибровки;
(3) принимают сигнал, переданный от передатчика, и величину его интенсивности в месте калибровки глубины при помощи приемного устройства;
(4) выполняют формирование сигнала и аналоговое/цифровое преобразование в сигнал, принимаемый приемным устройством для приема сигнала; и
(5) подают сигнал в центральный цифровой процессор для обработки сигнала и выполняют калибровку глубины при помощи любого компенсационного способа для измерения глубины.
Преимуществом настоящего изобретения является повышение точности измерения глубины направляющего устройства для горизонтально-направленного бурения путем использования компенсационных способов для компенсации погрешности, вызванной электрическими полями и шумами окружающей среды и возникающей при измерении глубины направляющего устройства для горизонтально-направленного бурения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг.1 показана блок-схема приемного устройства, используемого в способе многоточечной калибровки глубины направляющего устройства для горизонтально-направленного бурения в соответствии с первым вариантом реализации настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Способ многоточечной калибровки глубины направляющего устройства для горизонтально направленного бурения в соответствии с первым вариантом реализации настоящего изобретения содержит этапы, на которых:
(1) поддерживают выходной сигнал постоянной мощности передатчика средней мощности в специальных условиях электроснабжения;
(2) выбирают две глубины для калибровки;
(3) принимают сигналы, включая сигнал s в месте передатчика и два сигнала в двух точках калибровки глубины с интенсивностями s1, s2 соответственно, при помощи приемного устройства, причем при использовании двухточечной калибровки расстояние от первой точки калибровки s1 до передатчика по умолчанию равно 3 м, а расстояние от второй точки калибровки s2 до передатчика по умолчанию равно 10 м;
(4) выполняют формирование сигнала и аналоговое/цифровое преобразование в сигналы s, s1, s2, принимаемые приемным устройством (как показано на фиг.1); и
(5) подают сигналы s, s1, s2 в центральный цифровой процессор для обработки сигнала после аналового/цифрового преобразования и выполняют калибровку глубины при помощи линейного компенсационного способа для измерения глубины, причем центральный цифровой процессор для обработки сигнала производит вычисление в соответствии с уравнением:
r=(M0/s)1/3+[(M0/s)1/3-5]×k,
где r - измеряемая глубина, М0 - измеряемое значение, и s - интенсивность k сигнала, переданного от передатчика и принятого приемным устройством,
а значение k находится из уравнения:
k=[10-(М0/s2)1/3]/[(М0/s2)1/3-5],
где М0 - измеряемое значение, s2 - интенсивность сигнала, возникающего во второй точке калибровки и принятого приемным устройством, а измеряемое значение М0 вычисляется из уравнения:
М0=s1×R3,
где s1 - интенсивность сигнала, возникающего в первой точке калибровки и принятого приемным устройством, a R - расстояние от первой точки калибровки до передатчика, имеющее значение по умолчанию, равное 3 м.
Изобретение относится к измерениям глубины и, в частности, к способу многоточечной области калибровки глубины направляющего устройства для горизонтально направленного бурения. Способ многоточечной калибровки глубины содержит этапы, на которых поддерживают выходной сигнал постоянной мощности передатчика средней мощности в специальных условиях электроснабжения; выбирают, по меньшей мере, две глубины для калибровки; принимают сигнал, переданный от передатчика, и величину его интенсивности в месте калибровки глубины при помощи приемного устройства; выполняют формирование сигнала и аналоговое/цифровое преобразование в сигнал, принимаемый приемным устройством для приема сигнала; и подают сигнал в центральный цифровой процессор для обработки сигнала и выполняют калибровку глубины при помощи компенсационного способа для измерения глубины. Технический результат заключается в увеличении точности измерения глубины путем использования компенсационных способов для компенсации погрешности, вызванной электрическими полями и шумами окружающей среды и возникающей при измерении глубины направляющего устройства для горизонтально направленного бурения. 4 з.п. ф-лы, 1 ил.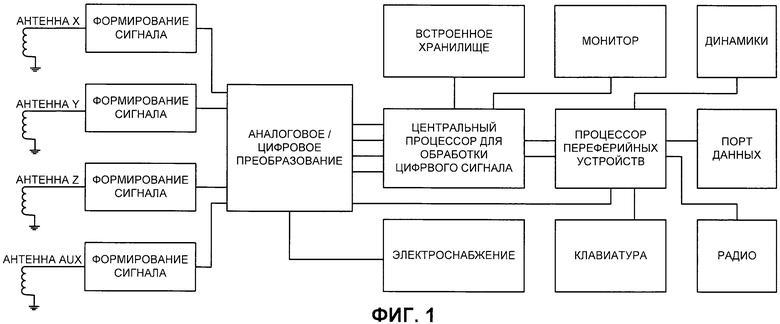
1. Способ многоточечной калибровки глубины направляющего устройства для горизонтально направленного бурения, содержащий этапы, на которых:
(1) поддерживают выходной сигнал постоянной мощности передатчика средней мощности в специальных условиях электроснабжения;
(2) выбирают по меньшей мере две глубины для калибровки;
(3) принимают сигнал, переданный от передатчика, и величину его интенсивности в месте калибровки глубины при помощи приемного устройства;
(4) выполняют формирование сигнала и аналоговое/цифровое преобразование в сигнал, принимаемый приемным устройством для приема сигнала; и
(5) подают сигнал в центральный цифровой процессор для обработки сигнала и выполняют калибровку глубины при помощи любого компенсационного способа для измерения глубины.
2. Способ многоточечной калибровки глубины направляющего устройства для горизонтально направленного бурения по п.1, в котором в качестве точек калибровки используют первую точку калибровки s1 и вторую точку калибровки s2, используемые для осуществления компенсационного способа.
3. Способ многоточечной калибровки глубины направляющего устройства для горизонтально направленного бурения по п.1 или 2, в котором в качестве компенсационного способа используют линейный компенсационный способ.
4. Способ многоточечной калибровки глубины направляющего устройства для горизонтально направленного бурения по п.3, в котором линейный компенсационный способ осуществляют в соответствии с уравнением
r=(М0/s)1/3+[(М0/s)1/3-5]·k,
где r - измеряемая глубина, М0 - измеряемое значение, s - интенсивность k сигнала, переданного от передатчика и принимаемого приемным устройством, а значение k находится из уравнения
k=[10-(М0/s2)1/3/[(М0/s2)1/3-5],
где М0 - измеряемое значение, s2 - интенсивность сигнала, возникающего во второй точке калибровки и принимаемого указанным приемным устройством.
5. Способ многоточечной калибровки глубины направляющего устройства для горизонтально направленного бурения по п.4, в котором измеряемое значение М0 вычисляют из уравнения
М0=s1·R3,
где s1 - интенсивность сигнала, возникающего в первой точке калибровки и принимаемого указанным приемным устройством, a R - расстояние от передатчика до первой точки калибровки.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Локационная система направленного бурения | |||
| Руководство оператора | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 2003201126 A1, 30.10.2003 | |||
| US 2005046424 A1, 03.03.2005 | |||
| US 5990682 A, 23.11.1999 | |||
| EP 1608840 A1, 28.12.2005. | |||

