Изобретение относится к военной технике радиосвязи и может быть использовано для повышения защищенности подвижных или стационарных взаимодействующих радиоизлучающих объектов (РИО) от наводящегося по радиоизлучению высокоточного оружия (ВТО) (ракет), активно используемыми в современных боевых действиях.
Общий анализ проблемы. Достижения техники после Второй мировой войны позволили создать ВТО, применение которых стало эффективным способом выведения как мобильных, так и стационарных РИО из строя. Существует группа ВТО, удовлетворяющих принципу "выстрелил и забыл", наведение которых на РИО большую часть времени полета осуществляется по радиоизлучению РИО при достаточной мощности его излучения. Во время полета к намеченной цели ВТО выбирает наилучшие в энергетическом смысле точки обнаруженного радиоизлучения. На входящую в ВТО головку самонаведения (ГСН) поступает информация о радиоизлучении, на основе которой система управления ВТО наводит его на цель, что определяет высокую вероятность поражения цели. ГСН ВТО предназначена для работы в любой области или любых областях энергетического спектра, однако общим является то, что все головки самонаведения должны получать энергию для слежения за намеченной целью. Приемник энергии головки самонаведения - это тонкий, чувствительный механизм, всегда защищенный путем размещения его за обтекателем, который является прозрачным для энергии заданной частоты.
Высокая вероятность поражения и сравнительно низкая стоимость, особенно в сравнении с потенциальной целью, делают их экономически эффективными системами вооружения, что определило распространение ВТО. Это повысило опасность, создаваемую данным оружием, как для воюющих, так и для невоюющих сторон, особенно в случае получения этих боеприпасов террористическими странами и/или организациями.
Стратегия обороны для противодействия ВТО так же многообразна, как и вероятные цели этих боеприпасов. Ни один из них не является идеальным, ни один не работает против любой угрозы, и ни один в отдельности или в сочетании с другими не способен с высокой гарантией ликвидировать угрозу ВТО.
Известны способы и устройства, обеспечивающие снижение точности наведения ВТО в виде противорадиолокационных ракет за счет уменьшения объема информации, поступающей от защищаемой РИО (РЛС) на ВТО (Небабин В.Г. и др. "Защита РЛС от противорадиолокационных ракет". - "Зарубежная радиоэлектроника", №5, 1990, с.73). Примерами данного подхода являются:
1. Способы, основанные на введении дополнительного устройства обнаружения ВТО и ложных передатчиков с антеннами, причем защищаемая РИО при обнаружении ВТО выключается, а ложные передатчики включаются и излучают сигналы в направлении на противорадиолокационные ракеты (Патент Германии №3341069, Заявка Японии 2-40193). Сокращение времени работы защищаемой РИО в эфире путем полного или периодического выключения защищаемой РИО определяет увеличение ошибки наведения ВТО. Длительность паузы в работе защищаемой РИО определяется временем пролета ВТО конечного участка траектории, величина которого определяется требуемой величиной промаха.
Недостаток этих способов состоит, во-первых, в необходимости обнаружения и распознавания ВТО, что представляет собой сложную задачу из-за малой площади эффективной поверхности рассеяния ВТО, во-вторых, при поочередном пуске нескольких ВТО величина паузы может потребоваться недопустимо большой. При этом способе защиты противник достигает цели - выведения защищаемой РИО из строя если не путем ее уничтожения, то путем вынужденного ее выключения.
2. Способы, основанные на прекращении излучения защищаемой РИО в сторону ВТО при обнаружении последней и излучении сигнала ложного источника через дополнительную антенну, соединенную с РИО кабелем, либо непосредственно от отражателя, установленного на земле (Патент Германии №4229509, Патент Великобритании №2252464) или в воздухе (Заявка Японии №4-351984).
Недостатком данных изобретений является то, что антенны также легко поражаются как фугасными, так и осколочными составляющими боевой части ВТО при подрыве ее даже на расстоянии до двух-трех десятков метров, что приводит к поражению приемопередающей аппаратуры, формирующей маскирующие импульсы.
Общим недостатком способов, которые используют для защиты РИО ложные передатчики, излучающие свои сигналы через антенну в направлении на ВТО, является то, что при достаточной для защиты РИО энергетике этих сигналов ВТО перенацеливается на ложный передатчик и поражает его с вероятностью, близкой к единице. Поэтому при одновременной атаке на РИО несколькими ВТО (стандартный прием ведения боевых действий - "волчья стая") после поражения первой ракетой ложного передатчика последующие ракеты уверенно поражают защищаемую РИО.
Таким образом, общий недостаток описанных способов состоит в недостаточной эффективности защиты РИО от ВТО, являющийся следствием высокой вероятности поражения ВТО ложных передатчиков и СВЧ-кабелей, соединяющих защищаемого РИО с ложным передатчиком.
Наиболее близким к предлагаемому изобретению является способ защиты РИО в виде радиолокационной станции (РЛС) от ВТО (противорадиолокационная ракета (ПРР)) (патент РФ №2170940, G01S 7/06, 2001 г.), заключающийся в излучении ложных сигналов с помощью второго РИО (постановщика ложных сигналов (ПЛС)), для чего измеряют координаты ПЛС, измеренные координаты сравнивают с заданными и при их отличии на величину, большую пороговой, формируют команды управления, с помощью которых перемещают ПЛС в заданную точку или по заданным траекториям, причем траектории и координаты задают, исходя из условия формирования траектории движения ПРР, уводящей ее в район, безопасный для РЛС, а координаты ПЛС при известных координатах постановщика активных помех (ПАП) или ПРР выбирают, исходя из условия удаления ПЛС от помехоносителя (ПРР), на расстояние, определяемое по формуле

где Rл, Rр - расстояние от ПАП (ПРР) до ПЛС и РЛС соответственно; Рл, Pр - мощность ложных и рабочих импульсов соответственно; Gл, Gр - коэффициент усиления антенны ПЛС и РЛС соответственно в направлении фона диаграммы направленности антенны.
Недостатком данного способа является низкая вероятность подавления сигнала управления ракетой и (или) сигналов управления несколькими управляемыми ракетами при групповой атаке, поскольку:
1) излучение помеховых импульсов в направлении источника излучения является демаскирующим признаком, позволяющим атакующему изменить параметры канала управления ракетой и тем самым сорвать возможное противодействие;
2) при одновременной атаке на РИО несколькими ВТО (стандартный прием ведения боевых действий - "волчья стая") после поражения первой ракетой ложного передатчика последующие ракеты уверенно поражают защищаемую РИО;
3) отсутствие учета текущей помеховой обстановки в пространстве реализации противодействия предъявляет к системе защиты объекта от управляемых ракет значительные требования по обеспечению энергетики помехового излучения.
Целью изобретения является расширение возможностей способа-прототипа, путем повышения защищенности РИО от атакуемого ВТО при групповой атаке.
Технический результат настоящего изобретения заключается в создании виртуальной точки наведения ВТО (ракет), удаленной от защищаемого РИО на расстояние, превышающее эффективный радиус поражения боевой части ВТО, путем изменения поступления энергии наведения в ГСН, характеризующей атакующую радиоцель ВТО, чтобы его ГСН не могла больше сохранять направление на намеченную цель, и приведения в результате этого системы наведения и управления неспособным наводить атакующую ракету на цель, т.е. выход принимаемой энергии за пределы параметров головки самонаведения (порога ее восприятия), что обеспечивает неуязвимость атакуемого РИО.
Поставленная задача решается тем, что увеличение защищенности РИО от поражения ВТО, в предлагаемом способе, достигается путем формирования заградительной зоны взаимодействующих РИО, которая позволяет осуществлять захват и увод ВТО в направлениях, безопасных для защищаемой РИО, для чего периодически запоминают текущие параметры режима радиосвязи взаимодействующих РИО, прекращают их связь и переходят в режим измерения и синхронизации, при этом формируют синхроимпульс от командного к ведомому РИО, принимают его ведомым РИО и ретранслируют к командному РИО, который принимает его в свою очередь и формирует для ведомого РИО второй синхроимпульс, при этом измеряют время пересылки синхроимпульсов для каждого РИО Δtк и Δtв, с учетом времени обработки синхроимпульса Δt0 в каждом РИО вычисляют расстояние между ними 

f=mc/l,
далее переходят в режим излучения ложных сигналов в виде цуга когерентного кругового радиоизлучения со временем когерентности Δt, для чего синхронизируют излучения между взаимодействующими РИО, путем включения излучения когерентного кругового радиоизлучения для ведомого РИО после расчета частоты f излучения, а задержка начала излучения когерентного кругового радиоизлучения командного РИО равна 
lког=Δtc=2πc/Δω≤R,
где R - дальность когерентного кругового радиоизлучения
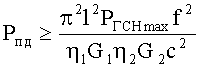
где PГСН0 - мощность сигнала на входе ГСН в свободном пространстве; Pпд - мощность передатчика; η1, η2 - КПД передающей и приемной фидерных линий; G1, G2 - коэффициенты усиления антенн; f - частота излучения в режиме когерентного кругового радиоизлучения.
Кроме этого зона, в которую осуществляется увод ВТО, располагается между защищаемыми РИО, длина l которой для ВТО с радиусом боевого действия rбэ при запасе δ надежности защиты РИО выбирается равной
l≥2rбэ+δ,
а виртуальная цель в зоне располагается по средине между защищаемыми РИО. При этом запас δ надежности защиты РИО определяется дальностью полета ВТО за счет оставшегося его энергетического ресурса после достижения виртуальной цели.
Мощность атакуемых передатчиков Pпд в режиме кругового радиоизлучения выбирают таким образом, чтобы в координате виртуальной цели мощность результирующего поля превосходила максимально допустимое значение излучения на входе ГСН PГСНmax, что приводит к ослеплению и выходу из строя ГСН, т.е.
Причем переход от режима связи взаимодействующих РИО к режиму радиоизлучения производится с периодом
где Fmax - максимальная частота спектра информационного сообщения.
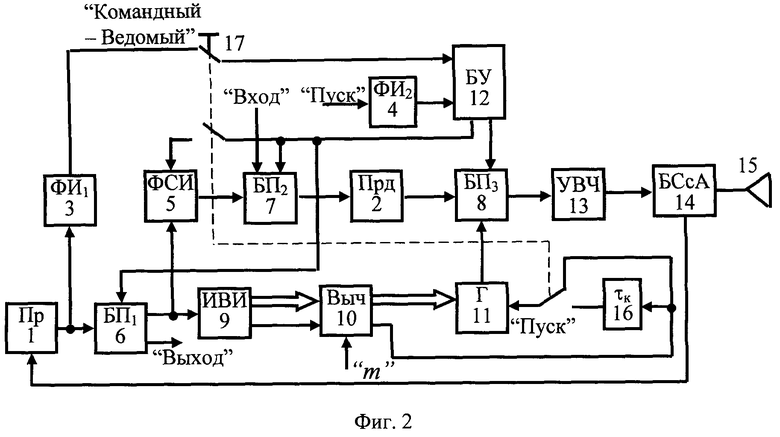
Система по предлагаемому способу состоит из двух идентичных устройств, каждое из которых содержит приемник, передатчик, два формирователя импульсов, формирователь синхроимпульсов, три блока переключателей, измеритель временных интервалов, вычислитель, генератор, блок управления, усилитель высокой частоты, блок согласования с антенной, антенну, элемент задержки и переключатель "Командный-Ведомый" режимов работы, причем выход приемника подключен к входу первого блока переключателей и через первый формирователь импульсов и первый переключатель режимов работы с первым входом блока управления, второй вход которого через второй формирователь импульсов соединен с входом "Пуск" устройства, первый выход первого блока переключателей соединен с выходом "Выход" устройства, а его второй выход соединен с первым входом формирователя синхроимпульсов и входом измерителя временных интервалов, информационные выходы последнего соединены с первыми информационными входами вычислителя, вторые информационные входы которого соединенным со входами "Задания коэффициента кратности", а выход окончания измерения измерителя временных интервалов с управляющим входом вычислителя, информационные выходы которого соединены с входами задания частоты генератора, а выход окончания вычисления вычислителя через третьи контакты переключателя режимов работы с входом "Пуск" генератора непосредственно и через элемент задержки, первый выход блока управления соединен с входом управления первого блока переключателей и второго блока переключателей, а через второй контакт переключателя режимов работы со вторым входом формирователя синхроимпульсов, выход последнего соединен с первым информационным входом второго блока переключателей, ко второму информационному входу которого подключен вход "Bход" устройства, а выход к входу передатчика, выход которого соединен с первым информационным входом третьего блока переключателей, второй информационный вход которого соединен с выходом генератора, вход управления со вторым выходом блока управления, а выход через усилитель высокой частоты и блок согласования с антенной с антенной, второй выход которого соединен с входом приемника.
Проведенный анализ уровня развития техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественные всем признакам заявленного технического решения, отсутствуют, что указывает на соответствие заявленного изобретения условию патентоспособности "новизна". Заявляемый способ удовлетворяет критерию «изобретательский уровень», поскольку введенные отличительные признаки - в аналогах не встречаются, но требует их обоснование.
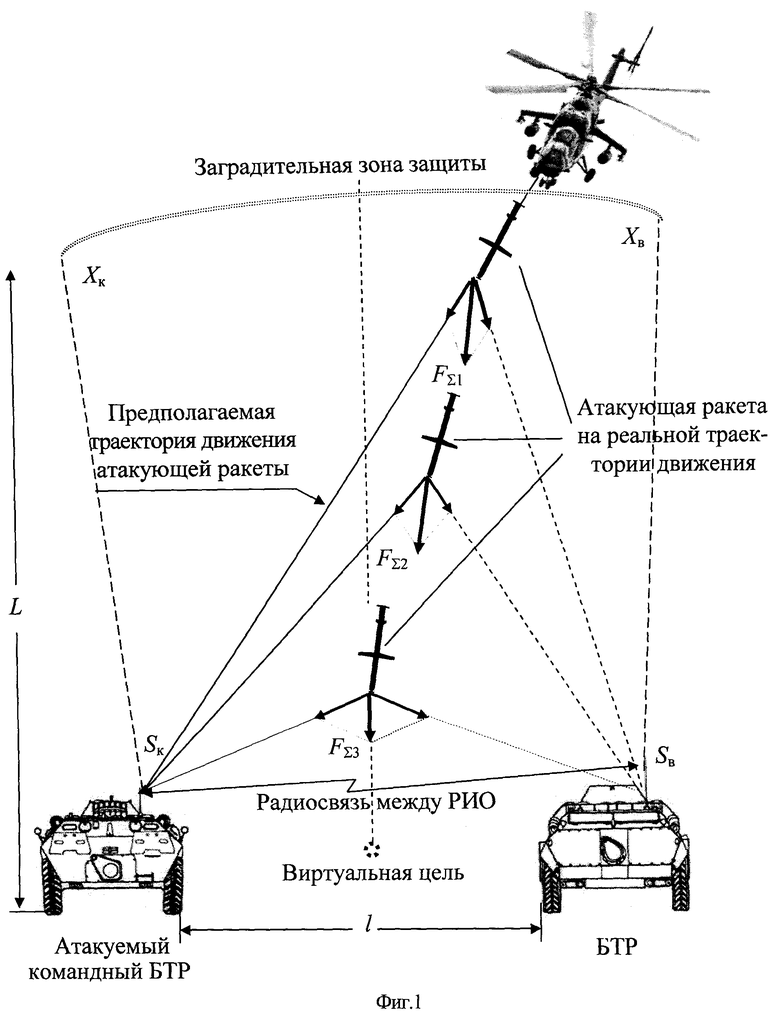
Заявленный способ поясняется пространственно-геометрической моделью способа защиты РИО от ВТО в виде управляемых ракет, представленная на фиг.1. Замкнутый сегмент сферы; SкXкXвSв является предельной частью воздушного пространства, в котором происходит захват цели и корректировка дальнейшей траектории полета ракеты. Дальность эффективного действия ГСН большинства ракет, носителями которых являются боевые вертолеты, не превышает 3 км, при этом эффективная дальность применения управляемых ракет составляет от 15 до 20 км [1]. Под радиоуправлением ракета с момента ее пуска пролетает от 12 до 17 км со скоростью 250-300 м/с. Таким образом, у системы зашиты РИО от управляемых ракет минимально есть только 40-56 секунд для захвата ВТО по радиоканалу и увода его от РИО.
При наведении ВТО на вынесенный виртуальный источник излучения, как предусмотрено настоящим изобретением, повышается эффективность защиты РИО от поражения ВТО по сравнению с известными способами, так как виртуальный источник излучения может располагаться на расстоянии до 100 метров от РИО.
Система по предлагаемому способу защиты РИО от ВТО включает два идентичных устройства (фиг.2), каждое из которых например могут содержать приемник Пр 1, передатчик Прд 2, два формирователя импульсов ФИ1 3 и ФИ2 4, формирователь синхроимпульсов ФСИ 5, три блока переключателей БП1 6, БП2 7 и БП3 8, измеритель временных интервалов ИВИ 9, вычислитель 10, генератор Г 11, блок управления БУ 12, усилитель высокой частоты УВЧ 13, блок согласования с антенной БСсА 14, антенну 15, элемент задержки 16 и переключатель "Командный-Ведомый" режимов работы 17.
В данном устройстве выход приемника Пр 1 подключен к входу первого блока переключателей БП1 6 и через первый формирователь импульсов ФИ1 3 и первый переключатель режимов работы 17 с первым входом блока управления БУ 12, второй вход которого через второй формирователь импульсов ФИ2 4 соединен с входом "Пуск" устройства. Первый выход первого блока переключателей БП1 6 соединен с выходом "Выход" устройства, а его второй выход соединен с первым входом формирователя синхроимпульсов ФСИ 5 и входом измерителя временных интервалов 9. Информационные выходы измерителя временных интервалов ИВИ 9 соединены с первыми информационными входами вычислителя Выч. 10, вторые информационные входы которого соединенным со входами "Задания коэффициента кратности", а выход окончания измерения измерителя временных интервалов ИВИ 9 с управляющим входом вычислителя 10. Информационные выходы вычислителя Выч. 10 соединены с входами задания частоты генератора Г 11, а выход окончания вычисления вычислителя Выч. 10 через третьи контакты переключателя режимов работы 17 с входом "Пуск" генератора Г 11 непосредственно и через элемент задержки 16. Первый выход блока управления БУ 12 соединен с входом управления первого блока переключателей БП1 6 и второго блока переключателей БП2 7, а через второй контакт переключателя режимов работы 17 со вторым входом формирователя синхроимпульсов 5. Выход формирователя синхроимпульсов 5 соединен с первым информационным входом второго блока переключателей БП2 7, ко второму информационному входу которого подключен вход "Вход" устройства, а выход к входу передатчика Прд 2. Выход передатчика Прд 2 соединен с первым информационным входом третьего блока переключателей БП3 8, второй информационный вход которого соединен с выходом генератора Г 11, вход управления со вторым выходом блока управления БУ 12, а выход через усилитель высокой частоты УВЧ 13 и блок согласования с антенной БСсА 14 с антенной 15. Второй выход блока согласования с антенной БСсА 14 соединен с входом приемника Пр 1.
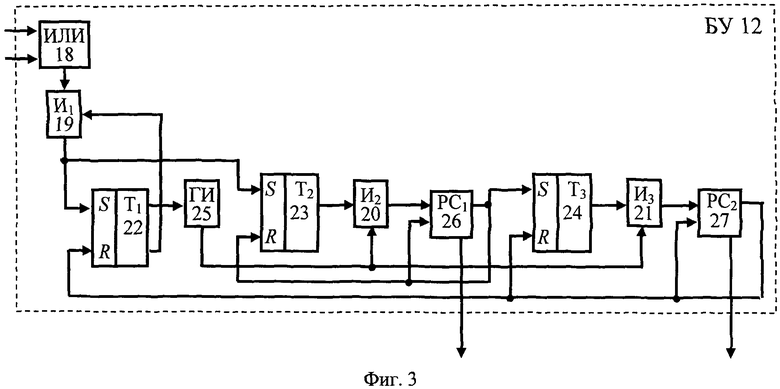
Пример реализации блока управления БУ 12 приведен на фиг.3, который содержит элемент ИЛИ 18, три элемента И1 19, И2 20, И3 21, три RS-триггера Т1 22, Т2 23, Т3 24, генератор импульсов ГИ 25, два регистра сдвига PC1 26 и РС2 27.
Оба входа блока управления 12 через элемент ИЛИ 18 соединены с первым входом первого элемента И1 19, ко второму входу которого подключен инверсный выход первого триггера Tp1 22, S - вход которого соединен с выходом первого элемента И1 19 и с S - входом второго триггера Т2 23, прямой выход первого триггера T1 22 соединен с входом управления генератора импульсов ГИ 25. Выход генератора ГИ 25 соединен с первым входом второго И2 20 и третьего И3 21. Выход второго триггера Т2 23 соединен с вторым входом второго элемента И2 20, выход которого соединен с входом первого регистра сдвига РС1 26. Выход первого регистра сдвига РС1 26 соединен с его входом установки в исходное состояние, с S - входом третьего триггера Т3 24 и с R - входом второго триггера Т2 23. Выход третьего триггера Т3 24 соединен со вторым входом третьего элемента И3 21, выход которого соединен с входом второго регистра сдвига РС2 27. Выход второго регистра сдвига РС2 27 соединен с его входом установки в исходное состояние и с R - входами первого и третьего триггера (T1 и Т3). Вторые выходы регистров сдвига 26 и 27 являются выходами блока управления 12.
Работа устройства в предлагаемой системе защиты РИО от радионаводимого ВТО сводится к циклическому переключению из режима радиообмена в режим синхронизации и измерения и далее в режим радиоизлучения (фиг.4). Интервалы режима радиообмена и режима радиоизлучения определяется дискретизацией информационного сообщения по теореме Котельникова, по которой сигнал с ограниченным спектром (Fmax) полностью определяется отсчетами с частотой
Fд≥2Fmax,
где Fд - частота дискретизации, Fmax - максимальная частота спектра сигнала.
Так, например, для телефонного канала Fmax составляет 3,4 кГц, т.е. ТЛФ сигнал можно передать отдельными значениями, следующими с частотой 6,8 кГц и выше (стандартное значение частоты дискретизации в ТЛФ канале 8 кГц).
1. В режиме радиообмена в течение интервала радиообмена (фиг.4) в открытом пространстве точечный излучатель равномерно излучает радиоволны во всех направлениях с излучаемой мощностью Pпд, а плотность потока мощности на расстоянии R равномерно распределится по поверхности сферы:
где Pпр0 - мощность сигнала на выходе приемника в свободном пространстве; Pпд - мощность передатчика; η1, η2 - КПД передающей и приемной фидерных линий; G1, G2 - коэффициенты усиления антенн; λ - длина волны рабочего диапазона частот; R - расстояние между передатчиком и приемником.
В реальном пространстве
Pпр=Pпр0V2
где V=E/E0 - множитель ослабления; E - напряженность электромагнитного поля на входе приемника в реальном пространстве; E0 - напряженность электромагнитного поля на входе приемника в свободном пространстве.
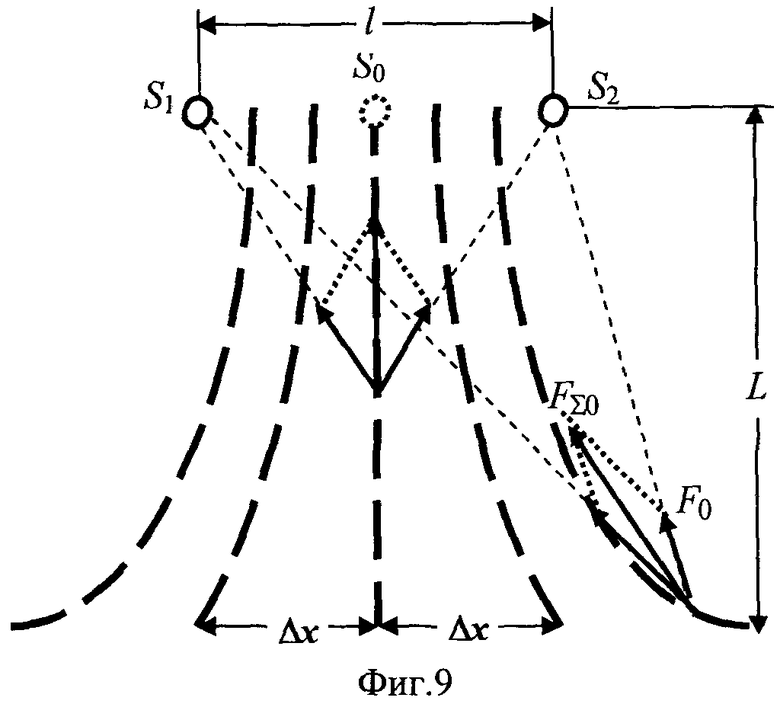
2. В режиме радиоизлучения система, состоящая из двух РИО, в течение времени Tизл (фиг.4) формирует их заградительную зону (фиг.1), где происходит захват ГСН ВТО сигналом от ложной цели, которую создает интерференционное поле от взаимодействующих РИО и искажает энергетическое поле защищаемого РИО. При управлении ВТО от ГНС на ВТО влияет результирующее воздействие FΣ0, которое переводит ВТО на центральные траектории максимумов интерференции. В результате ВТО перемещается на центральную линию интерференции и перенацеливается на виртуальную цель S0, уходя в зону безопасную для РИО. Таким образом, осуществляется формирование для взаимодействующих РИО заградительной зоны, оптимальной с точки зрения складывающейся ситуации налета и позволяющие осуществлять отвлечение и увод ВТО в направление на виртуальную цель, безопасное для защищаемой РИО. Зона, в которую обеспечивается увод ВТО (если в ней не производится уничтожение ВТО огневыми средствами), должна располагаться от РИО на расстоянии, превышающем радиус действия ГСН ВТО либо дальность, которую способен преодолеть ВТО за счет оставшегося энергетического ресурса. Аппарат (ГС), регистрирующий воздействие пришедших волн в точку, осуществляет измерение интенсивности колебаний в течение некоторого конечного интервала времени Δt, т.е. среднее по времени величине квадрата амплитуды колебаний

где черта означает знак усреднения, I1 и I2 - средние интенсивности интерферирующих излучений, Δφ(t)=φ1(t)-φ2(t) - разность фаз.
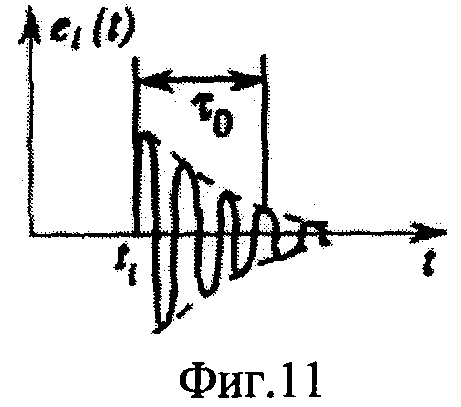
Причем поскольку Δt>>τ0 - время когерентности (фиг.11)), то регистрируется интерференционная картина, усредненная на большем по сравнению со временем когерентности τ0. Если интенсивности обеих интерферирующих волн одинаковы I1=I2=I0, то I=2I0(1+coskΔ). В этом случае Imax=4I0, Imin=0.
При интерференции:
а) волны должны иметь одинаковые (или близкие) частоты, чтобы картина, получающаяся в результате наложения волн, не менялась во времени (или менялась не очень быстро) (временная когерентность);
б) волны должны быть однонаправленными (или иметь близкое направление) (пространственная когерентность).
Если в некоторой однородной и изотропной среде два точечных источника S1 и S2 возбуждают две одновременно распространяющиеся синусоидальные сферические волны s1 и s2, то в точке B возникнет колебание, по принципу суперпозиции, равное s=s1+s2. Согласно формуле сферической волны:


где Φ1=ω1t-k1r1+α1 и Φ2=ω2t-k2r1+α2 - фазы распространяющихся волн; k1 и k2 - волновые числа (
В результирующей волне 




Для когерентных волн1 (1Две синусоидальные когерентные волны имеют одинаковую частоту и постоянную разность фаз.) (ω1=ω2=ω) при условии α2-α1=0


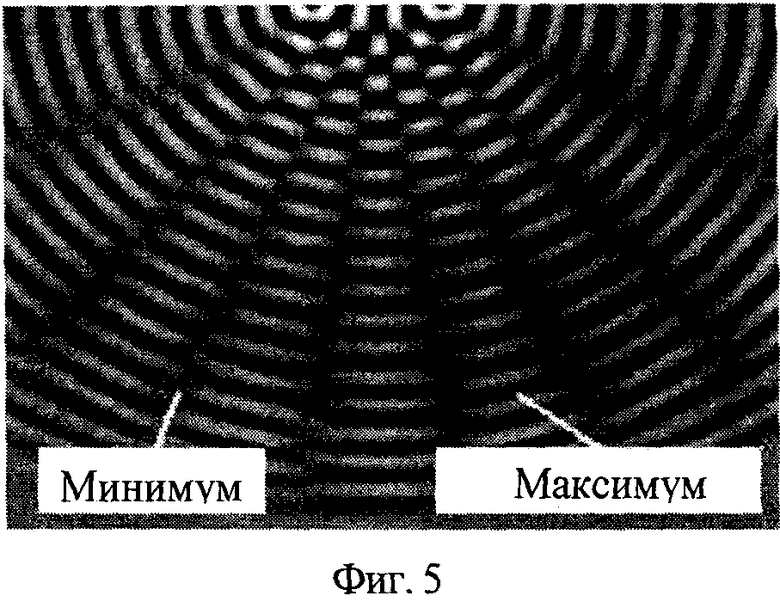
Результаты физического моделирования интерференции приведены на фиг.5.
Амплитуда колебаний максимальна (A/r=А1/r1+A2/r2) во всех точках среды, для которых k(r2-r1)=2mπ, где m=0, ±1, ±2, … (m - целое) или r2-r1=mλ, (так как 
Амплитуда колебаний минимальна (A/r=|А1/r1-A2/r2|) во всех точках среды, для которых k(r2-r1)=(2m+1)π, где m=0, 1, 2, … (m - натуральное) или 
Условия минимума и максимума сводятся к тому, что разность хода2 (2Разность хода двух интерферирующих волн до какой-либо точки это разность расстояний r2-r1=Δ от рассматриваемой точки до источников S1 и S2.) волн Δ=r2-r1=const. Данное выражение определяет уравнение гиперболы с фокусами в точках S1 и S2 (фиг.6). Совокупность точек, в которых наблюдается усиление (ослабление) результирующего колебания, представляет собой семейство гипербол. Между двумя интерференционными максимумами находятся интерференционные минимумы, т.е. при интерференции происходит перераспределение энергии волн в пространстве.
При сложении двух когерентных однонаправленных синусоид точки интерференции находятся на одной прямой, вдоль которой максимумы синусоид (минимумы) совпадают в пространстве и происходит их взаимное усиление (ослабления), т.е. при разности фаз складываемых волн Δφ=(φ2-φ1) и разности хода Δ=r2-r1 в точке пространства kΔ-Δφ=±2mπ будет наблюдаться интерференционный максимум, а при kΔ-Δφ=±2(m-1)π - интерференционный минимум.
При сложении двух когерентных встречно направленных синусоид точки интерференции находятся также на одной прямой, вдоль которой максимумы синусоид (минимумы) совпадают в пространстве и при синхронизации излучения происходит их взаимное усиление (ослабления), что определяет возникновение стоячей волны.
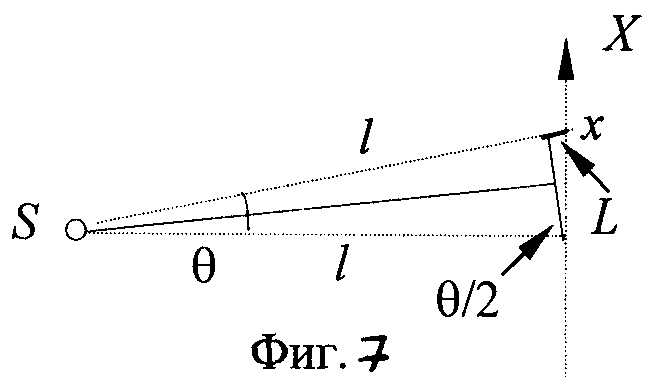
Излучение пары точечных источников. Колебания от уединенного источника в точках плоскости, отстоящей от него на большое, но конечное расстояние l. При этом ограничимся небольшим по сравнению с l смещением точки наблюдения от точки падения перпендикуляра, проведенного от источника волн S к плоскости, при малых значениях x. Проведем от источника волн отрезок прямой в точку наблюдения с координатой x и перпендикуляр к оси координат (фиг.7). Отложим от точки расположения источника вдоль гипотенузы треугольника отрезок длиной l и соединим конец этого отрезка с точкой xS, точкой падения перпендикуляра. Угол при вершине равнобедренного треугольника θ≈x/l, а основание составляет с осью 0X угол θ/2. Таким образом, разность хода лучей
ΔL≈xsin(θ/2)≈xθ/2≈x2/2l,
а разность фаз колебаний в этих точках
Δφ(x)=2πΔL/λ=πx2/lλ,
где x - смещение точки наблюдения от начальной координаты.
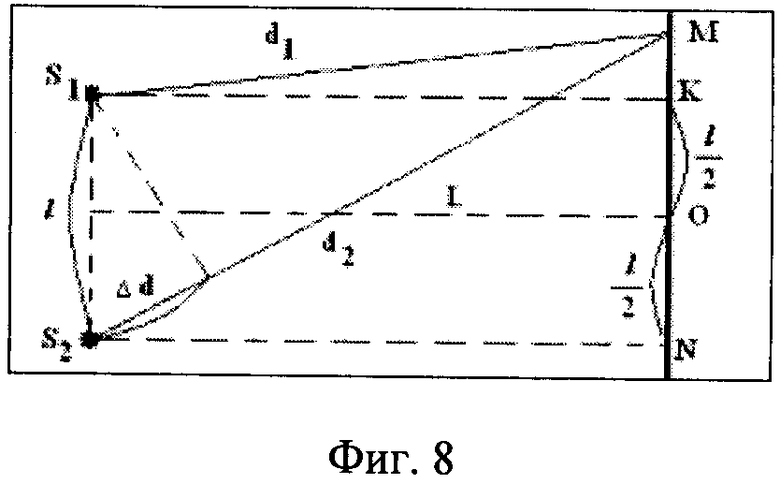
Определим положения максимума (минимума) для чего по теореме Пифагора определим d1 и d2 (фиг.8)


Найдем разность

т.е. геометрическая разность хода
Δd=d2-d1=2xl/(d2+d1).
Определив площадь треугольника S1MS2 и учтя, что она равна половине площади четырехугольника S1KNS2, получаем условие в виде
L×l=d1×d2sinθ=d1×d2×θ,
которое определяет квадратное уравнения

При этом, поскольку d1 - положительная величина, то

Из данного выражения при d<<L сумма d2+d1≈2L, а разность хода равна: 


Откуда ширина интерференционной картины3 (3Ширина интерференционной картины это расстояние между двумя максимумами (минимумами).) (фиг.9)
Δx=λL/l.
Для двух точечных источников, расположенных на расстоянии l друг от друга и на расстоянии L от плоскости наблюдения разность фаз колебаний в точке x
Δφ=π[(x+l/2)2-(x-l/2)2]/lλ.
После возведения в квадрат получаем:
Сложив эти колебания, имеем амплитуду (фиг.10)

которая имеет максимальные значения 2ξ0 в точках, отстоящих друг от друга на Δx.
Центральный максимум наблюдается при x=0. При удалении от центра увеличивается разность хода лучей от источников S1 и S2. Если разность хода больше длины когерентности, то амплитуда суммарных колебаний изменяется по закону
Изменение фазы за время Δt определяется условием
а длина когерентности
lког=Δtc=2πc/Δω.
Интерференция квазимонохроматических волн. Реальные излучения представляют в виде цугов4 (4Цуги это «обрывки» квазимонохроматических колебаний конечной длительности (время корреляции или когерентности) τ0.) (фиг.11), т.е. медленно изменяющимися случайными функциями времени с амплитудой a(t) и фазой φ(t):
E(t)=a(t)cos[ω0t+φ(t)].
Цуг имеет пространственную длину, равную cτ, где c - скорость света. При этом фаза волны остается постоянной на интервалах времени когерентности τ.
Соотношение неопределенности определяет связь между длительностью процесса во времени и шириной его спектра
τ0Δω≈2π,
т.е. спектр процесса со временем когерентности τ0 имеет ширину порядка Δω≈2π/τ0. При τ0>>T приходим к сильному неравенству Δω<<ω0, т.е. процесс является квазимонохроматическим.
При интерференции волн разность хода лучей, приходящих в точку наблюдения, не должна быть большой. Интерференцию дают колебания, относящиеся к одному цугу. Максимально допустимая разность хода при интерференции есть
Δmax≈cτ0≈2πc/Δω≈λ2/Δλ, mmax≈Δmax/λ≈λ/Δλ≈ω0/Δω,
где mmax - максимальный порядок интерференции; Δλ и Δω - ширина спектрального интервала.
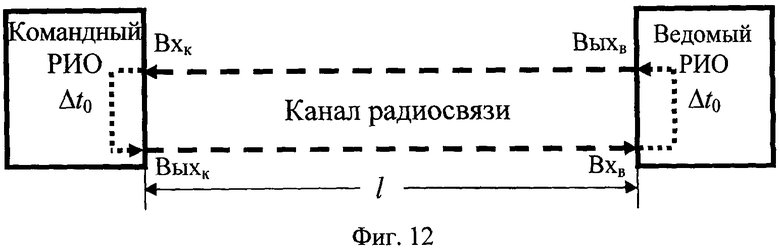
3. Для контроля формирования интерференционной картины в системе переходят в режим синхронизации и измерения (фиг.4). В данном режиме для измерения расстояния l между взаимодействующими РИО формирователь синхроимпульсов 5 формирует синхроимпульс от командного к ведомому РИО (точка Выхк) (фиг.12), принимает его ведомым РИО (точка Вхв) и ретранслирует к командному РИО (точка Выхв), который принимает его в свою очередь (точка Вхк) и формирует для ведомого РИО второй синхроимпульс (точка Выхк). При этом в измерителе временных интервалов ИВИ 9 измеряют время пересылки синхроимпульсов для каждого РИО Δtк и Δtв, а с учетом времени обработки синхроимпульса Δt0 в каждом РИО вычисляют в вычислителе Выч. 10 расстояние между ними как (фиг.12)

Задав коэффициент кратности m=l/λ по полученному расстоянию между РИО l, определяют длину волны данного излучения λ и рассчитывают в вычислителе Выч. 10 за время Δt0 частоту f излучения в режиме излучения ложных сигналов
f=mc/l.
При этом принимают, что длина стоячей волны5 (5Стоячая волна - это волна, образующаяся при наложении двух волн одинаковой частоты и амплитуды, распространяющихся навстречу друг другу. Стоячая волна не переносит энергии, т.к. энергия переносится в равных количествах бегущей и отраженной волнами.) равна половине длины складываемых волн [2]:
λст.=λ/2.
После этого переходят в режим излучения генератором Г 11 ложных сигналов в виде цуга когерентного кругового радиоизлучения со временем когерентности Δt. Для этого синхронизируют излучения между взаимодействующими РИО, путем включения излучения когерентного кругового радиоизлучения генератором Г 11 для ведомого РИО после расчета частоты f излучения, а задержка начала излучения когерентного кругового радиоизлучения командного РИО равна времени прохождения синхроимпульса на выход ведомого РИО 
Промышленная применимость способа заключается в возможности его использования для защиты РИО военного назначения от радионаводимого ВТО и реализации этапов способа на существующей в настоящее время элементной базе.
ЛИТЕРАТУРА
1. Родионов Б.И., Новиков Н.Н. Крылатые ракеты в морском бою. По материалам открытой зарубежной печати. - М.: Воениздат. - 1987. - 215 с.
2. Иродов И.Е. Волновые процессы. Основные законы. Курс физики. Т.3. - М.: Высшая школа. - 1993. - 253 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ ОТ САМОНАВОДЯЩЕГОСЯ ОРУЖИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2022 |
|
RU2794223C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ФАКТА НАВЕДЕНИЯ САМОНАВОДЯЩЕГОСЯ ПО РАДИОИЗЛУЧЕНИЮ ОРУЖИЯ НА РАДИОЭЛЕКТРОННОЕ СРЕДСТВО, ЗАЩИЩЕННОЕ ОТВЛЕКАЮЩИМ УСТРОЙСТВОМ | 2012 |
|
RU2510481C2 |
| СПОСОБ РАДИОКОНТРОЛЯ | 2004 |
|
RU2287169C2 |
| СПОСОБ ЗАЩИТЫ МОБИЛЬНЫХ СРЕДСТВ ОТ РАДИО, РАДИОЛОКАЦИОННЫХ, ОПТИКОЭЛЕКТРОННЫХ СРЕДСТВ РАЗВЕДКИ И ПОРАЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ КОМБИНИРОВАННЫХ ЛОЖНЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410710C2 |
| СПОСОБ ПОВЫШЕНИЯ СКРЫТНОСТИ РАДИОИЗЛУЧАЮЩЕГО СРЕДСТВА В РАДИОЛИНИИ С ППРЧ | 2012 |
|
RU2520401C2 |
| УСТРОЙСТВО УГЛОВОГО СОПРОВОЖДЕНИЯ | 2015 |
|
RU2587466C1 |
| Способ определения координат радиоизлучающего объекта в рабочей зоне многопозиционного пассивного радиотехнического комплекса и устройство для его осуществления | 2020 |
|
RU2757197C1 |
| РЛС распознавания целей | 2019 |
|
RU2720355C1 |
| Способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве радиоизлучающего объекта и радиолокационная система для реализации этого способа | 2016 |
|
RU2617830C1 |
| Двухрежимная головка самонаведения | 2017 |
|
RU2661504C1 |



Изобретение относится к военной технике радиосвязи и может быть использовано для повышения защищенности подвижных или стационарных взаимодействующих радиоизлучающих объектов (РИО) от наводящегося по радиоизлучению высокоточного оружия (ВТО) (ракет). Заявленный способ заключается в излучении ложных сигналов, которое определяет формирование траектории движения ВТО, уводящей ее в район, безопасный для РИО, для чего формируют заградительную зону взаимодействующих РИО, в которой происходит захват и увод ВТО в направлениях, безопасных для защищаемой РИО. Достигаемый технический результат - создание виртуальной точки наведения ВТО (ракет), удаленной от защищаемого РИО на расстояние, превышающее эффективный радиус поражения боевой части ВТО, путем изменения поступления энергии наведения в ГСН, характеризующей атакующую радиоцель ВТО, чтобы его головка самонаведения не могла больше сохранять направление на намеченную цель, и приведения в результате этого системы наведения и управления неспособным наводить атакующую ракету на цель, что обеспечивает неуязвимость атакуемого РИО. 2 н. и 4 з.п. ф-лы, 12 ил.
1. Способ защиты радиоизлучаемого объекта от радионаводимого высокоточного оружия с головкой самонаведения, управляемого путем выбора наилучших в энергетическом смысле точек обнаруженного радиоизлучения, заключающийся в излучении ложных сигналов, которое определяет формирование траектории движения радионаводимого высокоточного оружия, уводящей ее в район, безопасный для радиоизлучаемого объекта, отличающийся тем, что формируют заградительную зону взаимодействующих радиоизлучаемых объектов, в которой происходит захват головки самонаведения и увод радионаводимого высокоточного оружия системой самонаведения в направлениях, безопасных для защищаемого радиоизлучаемого объекта, для чего периодически запоминают текущие параметры режима радиообмена взаимодействующих радиоизлучаемых объектов и прекращают их радиообмен, переходят в режим измерения и синхронизации, при этом формируют синхроимпульс от командного к ведомому радиоизлучаемому объекту, принимают его ведомым радиоизлучаемым объектом и ретранслируют к командному радиоизлучаемому объекту, который принимает его в свою очередь и формирует для ведомого радиоизлучаемого объекта второй синхроимпульс, при этом измеряют время пересылки синхроимпульсов для каждого радиоизлучаемого объекта Δtк и Δtв, с учетом времени обработки синхроимпульса Δt0 в каждом радиоизлучаемом объекте вычисляют расстояние между ними

задают коэффициент кратности m=l/λ расстояния между радиоизлучаемыми объектами l и длины волны данного излучения λ и рассчитывают за время τ0 частоту f излучения в режиме излучения ложных сигналов
f=mc/l, где c - скорость света,
далее переходят в режим излучения ложных сигналов в виде цуга когерентного кругового радиоизлучения со временем когерентности Δt, для чего синхронизируют излучения между взаимодействующими радиоизлучаемыми объектами, путем включения излучения когерентного кругового радиоизлучения для ведомого радиоизлучаемого объекта после расчета частоты f излучения, а задержка начала излучения когерентного кругового радиоизлучения командного радиоизлучаемого объекта на время
что обеспечивает возникновение стоячей волны между радиоизлучаемыми объектами и определяет режим когерентного кругового радиоизлучения, которое формирует интерференционное поле от взаимодействующих радиоизлучаемых объектов, при этом по мере приближения радионаводимого высокоточного оружия к цели, осуществляя выбор наилучших в энергетическом смысле точек интерференционного поля радиоизлучения, оно переходит к центральной интерференционной полосе, выводящей радионаводимое высокоточное оружие на виртуальную цель, причем длина когерентности lког, определяющая глубину заградительной зоны для эффективного захвата и увода радионаводимого высокоточного оружия по интерференционному полю радиоизлучения к виртуальной цели,
lког=Δtc=2πc/Δω≤R,
где R - дальность когерентного кругового радиоизлучения
где РГСН0 - мощность сигнала на входе головки самонаведения в свободном пространстве; Рпд - мощность передатчика; η1, η2 - коэффициент полезного действия передающей и приемной фидерных линий; G1, G2 - коэффициенты усиления антенн; f - частота излучения в режиме когерентного кругового радиоизлучения.
2. Система по способу по п.1, состоящая из двух идентичных устройств, каждое из которых содержит приемник, передатчик, два формирователя импульсов, формирователь синхроимпульсов, три блока переключателей, измеритель временных интервалов, вычислитель, генератор, блок управления, усилитель высокой частоты, блок согласования с антенной, антенну, элемент задержки и переключатель "Командный-Ведомый" режимов работы, причем выход приемника подключен к входу первого блока переключателей и через первый формирователь импульсов и первый переключатель режимов работы к первому входу блока управления, второй вход которого через второй формирователь импульсов соединен с входом "Пуск" устройства, первый выход первого блока переключателей соединен с выходом "Выход" устройства, а его второй выход соединен с первым входом формирователя синхроимпульсов и входом измерителя временных интервалов, информационные выходы последнего соединены с первыми информационными входами вычислителя, вторые информационные входы которого соединены со входами "Задания коэффициента кратности", а выход окончания измерения измерителя временных интервалов с управляющим входом вычислителя, информационные выходы которого соединены с входами задания частоты генератора, а выход окончания вычисления вычислителя через третьи контакты переключателя режимов работы с входом "Пуск" генератора непосредственно и через элемент задержки, первый выход блока управления соединен с входом управления первого блока переключателей и второго блока переключателей, а через второй контакт переключателя режимов работы со вторым входом формирователя синхроимпульсов, выход последнего соединен с первым информационным входом второго блока переключателей, ко второму информационному входу которого подключен вход "Вход" устройства, а выход к входу передатчика, выход которого соединен с первым информационным входом третьего блока переключателей, второй информационный вход которого соединен с выходом генератора, вход управления со вторым выходом блока управления, а выход через усилитель высокой частоты и блок согласования с антенной, второй выход которого соединен с входом приемника.
3. Способ по п.1, отличающийся тем, что зона, в которую осуществляется увод ВТО, располагается между защищаемыми РИО, длина 1 которой для ВТО с радиусом боевого действия rбэ при запасе δ надежности защиты РИО выбирается равной
l≥2rбэ+δ,
а виртуальная цель в зоне располагается посредине между защищаемыми РИО.
4. Способ по п.1, отличающийся тем, что запас δ надежности защиты РИО определяется дальностью полета ВТО за счет оставшегося его энергетического ресурса после достижения виртуальной цели.
5. Способ по п.1, отличающийся тем, что мощность атакуемых передатчиков Рпд в режиме кругового радиоизлучения выбирают таким образом, чтобы в координате виртуальной цели мощность результирующего поля превосходила максимально допустимое значение излучения на входе ГСН PГСНmax, что приводит к ослеплению и выходу из строя ГСН, т.е.
6. Способ по п.1, отличающийся тем, что переход от режима радиообмена взаимодействующих РИО к режиму радиоизлучения производится с периодом
где Fmax - максимальная частота спектра информационного сообщения.
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2170940C2 |
| RU 95112917 А, 20.07.1997 | |||
| СПОСОБ И УСТРОЙСТВО РАДИОПОДАВЛЕНИЯ КАНАЛОВ СВЯЗИ | 2002 |
|
RU2229198C1 |
| СПОСОБ ЗАЩИТЫ ТЕХНИЧЕСКОГО СРЕДСТВА ОБРАБОТКИ ИНФОРМАЦИИ ОТ УТЕЧКИ ИНФОРМАЦИИ ПО КАНАЛАМ ПОБОЧНОГО ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ И НАВОДОК | 2003 |
|
RU2236759C1 |
| WO 2000076079 A1, 14.12.2000 | |||
| US 6476755 B1, 05.11.2002 | |||
| WO 2009091249 A1,23.07.2009 | |||

