Известный уровень техники
Настоящее изобретение имеет отношение к созданию моторизованного привода валика для исполнительного механизма, а в особенности для аэродинамически эффективной поверхности летательного аппарата.
Из соображений безопасности в эксплуатации, исполнительные механизмы, которые предусмотрены для систем позиционирования летательного аппарата, например исполнительные механизмы для поверхностей управления, поверхностей триммирования и поверхностей подъема, выполнены с резервированием, что особенно важно в случае исполнительных механизмов, которые используют для первичных органов управления полетом. Дублированная механическая параллельная конструкция исполнительных механизмов требует, чтобы в случае неисправности один дефектный привод не мешал работе второго исправного привода, а в особенности не приводил к его заеданию, так чтобы работа приведения в действие могла быть выполнена при помощи второго привода. В настоящее время для этого преимущественно используют гидравлические исполнительные механизмы.
В случае так называемого полностью электрического летательного аппарата, в котором указанные системы позиционирования работают с использованием электродвигателей, в настоящее время для создания резервированных приводов без заедания используют специальные приводы, например дорогие электрогидравлические приводы. Стандартные приводы валиков с электродвигателями простой конструкции не подходят для решения этой задачи, так как в них не может быть надежно исключено заедание блока привода. Например, в случае механического разрушения компонентов, например шарика в шариковом винтовом механизме привода валика, может происходить заедание резьбы гайки валика и резьбы самого валика, что может блокировать привод и что приводит к соответствующим неблагоприятным и, возможно, пагубным последствиям.
Сущность изобретения
Задачей настоящего изобретения является создание простого моторизованного привода валика, который обеспечивает работу без заедания. Такой моторизованный привод валика особенно хорошо подходит для конструкции с резервированием.
В соответствии с настоящим изобретением предлагается моторизованный привод валика для исполнительного механизма, а в частности для аэродинамически эффективной поверхности летательного аппарата, имеющий валик и двигатель, который содержит механический передающий элемент, входящий в зацепление с валиком, чтобы приводить в движение указанный валик и создавать относительное перемещение в осевом направлении между валиком и двигателем, и который поддерживается в элементе, закрепленном на месте относительно движения валика. В соответствии с настоящим изобретением, элемент, поглощающий вращающий момент двигателя, содержит разъемное соединение, которое разъединяется, когда превышен заданный вращающий момент, и освобождает двигатель для свободного движения в осевом направлении валика относительно (указанного) закрепленного элемента.
Предпочтительные варианты и усовершенствования моторизованного привода валика в соответствии с настоящим изобретением приведены в зависимых пунктах формулы изобретения.
В соответствии с вариантом осуществления настоящего изобретения, разъемное соединение содержит два элемента, которые выполнены с возможностью перемещения друг относительно друга, причем в первом положении указанные два элемента блокированы друг относительно друга, так что они введены во взаимное зацепление, чтобы передавать вращающий момент двигателя и создавать относительное движение валика, а во втором положении указанные два элемента разблокированы друг от друга и допускают (разрешают) свободное движение двигателя в осевом направлении валика, и дополнительно содержит средство, которое реагирует на вращающий момент, переданный двигателем, причем указанное средство, когда превышен заданный вращающий момент, побуждает элементы, которые выполнены с возможностью перемещения друг относительно друга, перемещаться из первого положения во второе положение.
В соответствии с вариантом осуществления настоящего изобретения, два элемента, которые выполнены с возможностью перемещения друг относительно друга, включают в себя удерживающий элемент с вырезом, в котором установлен двигатель с возможностью поворота на оси валика, по меньшей мере в заданном угловом диапазоне, и по меньшей мере один стопорный элемент, который предусмотрен на двигателе, находится в соответствующей выемке в удерживающем элементе, выполнен с возможностью перемещения вдоль окружности и направляется при помощи первой части заданного углового диапазона в направлении взаимного блокирования относительно осевого направления, причем выемка в удерживающем элементе имеет положение расцепления, образованное при помощи паза, при этом в указанном положении расцепления стопорный элемент выполнен с возможностью освобождения (освобождения для движения) в осевом направлении.
В соответствии с вариантом осуществления настоящего изобретения, средство, которое, когда превышен заданный вращающий момент, освобождает для движения элементы, которые выполнены с возможностью перемещения друг относительно друга из первого положения во второе положение, образовано при помощи фрикционной муфты, которая введена между элементами, которые выполнены с возможностью перемещения друг относительно друга.
В соответствии с другим вариантом осуществления настоящего изобретения, средство, которое, когда превышен заданный вращающий момент, освобождает для движения элементы, которые выполнены с возможностью перемещения друг относительно друга из первого положения во второе положение, образовано при помощи упругого пружинного элемента, который введен между элементами, которые выполнены с возможностью перемещения друг относительно друга.
Двигатель преимущественно представляет собой электродвигатель.
В соответствии с вариантом осуществления настоящего изобретения, передающий элемент, который входит в зацепление с валиком, представляет собой гайку валика, которая расположена по центру в роторе двигателя.
В соответствии с вариантом осуществления настоящего изобретения, двигатель окружает валик и расположен соосно с ним.
Может быть создано разъемное соединение, которое содержит единственный стопорный элемент, направляемый в выемке.
С другой стороны, может быть создано разъемное соединение, которое содержит два или несколько стопорных элементов, каждый из которых направляется в выемке, причем указанные стопорные элементы смещены друг от друга по окружности на одинаковые или разные углы.
Далее примерный вариант осуществления моторизованного привода валика в соответствии с настоящим изобретением будет описан со ссылкой на чертежи.
Краткое описание чертежей
На фиг.1 схематично показан разрез части моторизованного привода валика для исполнительного механизма, а в особенности для аэродинамически эффективной поверхности летательного аппарата, в соответствии с вариантом осуществления настоящего изобретения.
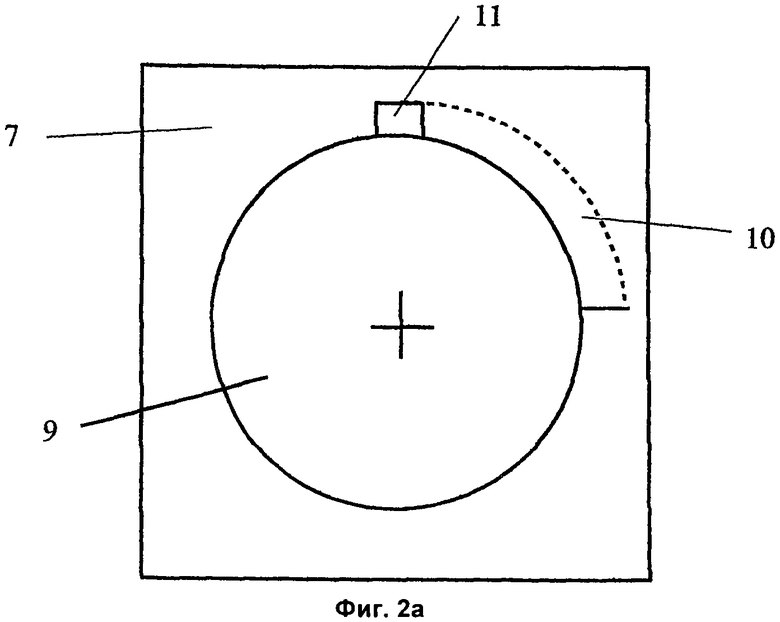
На фиг.2а) показан вид по стрелке, в направлении валика на фиг.1, удерживающего элемента, предусмотренного в моторизованном приводе валика, в соответствии с вариантом осуществления настоящего изобретения.
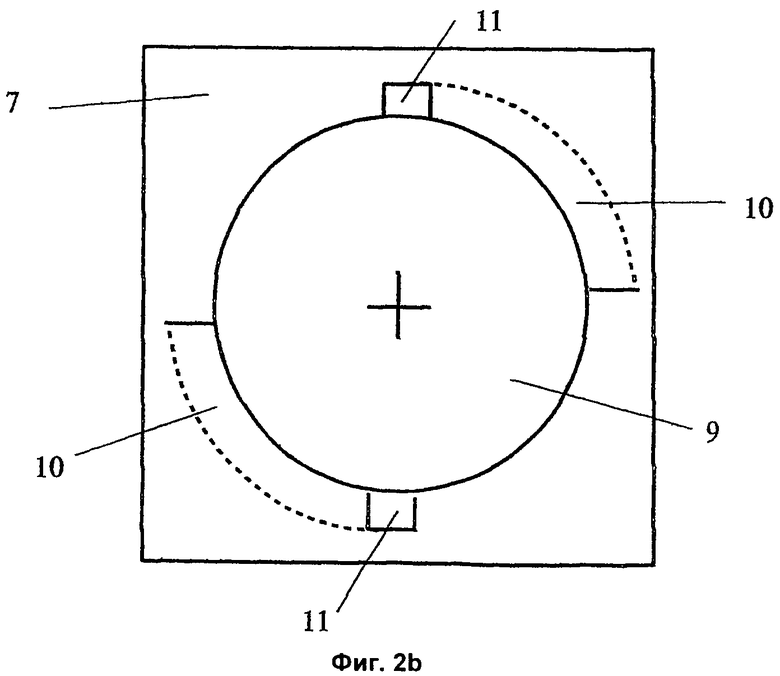
На фиг.2b) показан вид по стрелке, в направлении валика на фиг.1, удерживающего элемента, предусмотренного в моторизованном приводе валика, в соответствии с другим вариантом осуществления настоящего изобретения.
Подробное описание изобретения
На фиг.1 показана часть моторизованного привода валика для исполнительного механизма, который предусмотрен для привода аэродинамически эффективной поверхности летательного аппарата, например поверхности управления или подъемной поверхности летательного аппарата.
Этот моторизованный привод валика содержит валик 1, который на одном конце (левый конец на фиг.1) содержит крепежную проушину 12, которая соединена с перемещаемой аэродинамически эффективной поверхностью (не показана) летательного аппарата, непосредственно или при помощи промежуточных компонентов (не показаны). С другой стороны, привод валика поддерживается на компоненте или элементе 6, который относительно перемещения валика 1 следует считать неподвижным в осевом направлении валика 1. Этим компонентом 6 может быть, например, кожух моторизованного привод валика, который в свою очередь может быть соединен любым подходящим образом, с возможностью перемещения или без нее, с конструкцией летательного аппарата.
Моторизованный привод валика содержит двигатель 2, который содержит механический передающий элемент 4, который входит в зацепление с валиком 1, чтобы приводить его в движение, причем указанный передающий элемент 4 создает относительное движение между валиком 1 и двигателем 2 в осевом направлении, то есть в направлении оси валика. Двигатель 2 поддерживается на элементе, является неподвижным относительно перемещения валика, а именно является упомянутым ранее компонентом или элементом 6, который выполнен, например, в виде кожуха или конструктивного компонента летательного аппарата. Двигатель 2 содержит статор 13 со статорной обмоткой 15, которая получает ток возбуждения по проводам 14, и ротор 3, выполненный с возможностью вращения относительно статора 13, чтобы приводить во вращение валик 1. Ротор 3 и гайка 4 валика поддерживаются при помощи вкладышей 5 относительно статора 13 или кожуха двигателя 2.
Элемент 6, 7, 8, 9, который поглощает вращающий момент двигателя 2, содержит разъемное соединение 7, 8, 9, которое разъединяется, когда превышен заданный вращающий момент, и освобождает двигатель 2 для свободного движения в осевом направлении валика 1, относительно вышеупомянутого неподвижного элемента 6. Указанное разъемное соединение 7, 8, 9 содержит два элемента 7, 8, которые выполнены с возможностью относительного движения друг относительно друга, причем в первом положении указанные элементы имеют взаимное зацепление и сблокированы друг с другом, так что они передают вращающий момент двигателя 2 и создают движение валика 1 относительно неподвижного элемента 6, а во втором положении указанные элементы разомкнуты друг от друга, что позволяет двигателю 2 перемещаться в осевом направлении валика 1.
В примерных вариантах, показанных на фиг.1, 2а) и 2b), предусмотрены два элемента 7, 8, которые выполнены с возможностью перемещения друг относительно друга, а именно, удерживающий элемент 7 с вырезом 9, в котором установлен двигатель 2 с возможностью поворота на оси валика в заданном угловом диапазоне, а также по меньшей мере один стопорный элемент 8, который предусмотрен на двигателе 2, соединен с возможностью закрепления на указанном двигателе 2, расположен в соответствующей выемке 10 в удерживающем элементе 7 и выполнен с возможностью перемещения в направлении по окружности. Для этого выемка 10 выполнена в виде сектора кольца, в котором стопорный элемент 8 в указанном угловом диапазоне может двигаться по круговой траектории на оси валика. На первой части указанного углового диапазона стопорный элемент 8 направляется в направлении взаимного блокирования относительно осевого направления. Более того, выемка 10 в удерживающем элементе 7 содержит паз 11, который образует положение расцепления, в котором стопорный элемент 8 освобожден в осевом направлении. Это означает, что при вращении стопорного элемента 8 вдоль выемки 10 из положения блокировки в положение расцепления 11, этот стопорный элемент и, следовательно, двигатель 2 освобождаются, так что двигатель 2 выходит из зацепления с элементом 6, который закреплен относительно валика 1.
В примерном варианте, показанном на фиг.2а), предусмотрено соединение, которое содержит единственный стопорный элемент 8, который направляется в выемке 10, причем двигатель 2 выполнен с возможностью поворота вокруг оси валика в заданном угловом диапазоне.
В другом примерном варианте, показанном на фиг.2b), предусмотрено соединение, которое содержит два стопорных элемента 8, каждый из которых направляется в выемке 10, причем указанные стопорные элементы 8 смещены друг от друга по окружности на заданный угол, составляющий 180° на фиг.2b), при этом двигатель 2, в свою очередь, выполнен с возможностью поворота вокруг оси валика в заданном угловом диапазоне.
Когда соединение содержит два или несколько стопорных элементов 8, каждый из которых направляется в выемке 10, эти элементы улучшают распределение сил в соединении, которое образовано при помощи стопорных элементов 8, которые направляются в выемке 10, причем указанные стопорные элементы 8 могут быть смещены друг от друга по окружности на одинаковые или разные углы, например три элемента могут быть смещены друг от друга на 120° или на три разных угла, которые в сумме составляют 360°.
Разрешение на перемещение элементов 7, 8, которые выполнены с возможностью перемещения друг относительно друга из первого положения во второе положение, а именно, удерживающего элемента 7 и стопорного элемента или элементов 8, дает соответствующее средство, когда превышен заданный вращающий момент. В примерных вариантах, показанных на фиг.1, 2а) и 2b), для этого предусмотрена фрикционная муфта, которая введена между элементами 7, 8, которые выполнены с возможностью перемещения друг относительно друга, а именно между удерживающим элементом 7 и стопорным элементом 8. Эта фрикционная муфта относительно просто может быть введена между поверхностью стопорного элемента 8 и поверхностью выемки 10, образованной в удерживающем элементе 7, причем, по желанию, чтобы увеличить взаимное трение, может быть предусмотрено покрытие поверхности или облицовка поверхности на одном или на обоих указанных элементах, что является обычным при использовании фрикционных муфт.
Альтернативно, такое средство, которое, когда превышен заданный вращающий момент, разрешает движение элементов 7, 8, которые выполнены с возможностью перемещения друг относительно друга, также может быть выполнено в виде упругого пружинного элемента, введенного между двигателем 2 и удерживающим элементом 7 или неподвижным элементом 6. Однако такой пружинный элемент должен быть отсоединяемым по меньшей мере с одной стороны, чтобы обеспечивать полное освобождение двигателя (освобождение двигателя для движения) в осевом направлении валика 1.
Для создания резервированного исполнительного механизма, преимущественно используют два или несколько таких приводов валиков, по меньшей мере один из которых содержит разъемное соединение 7, 8, 9 описанного типа или аналогичного типа, но преимущественно такого типа, в котором соединение 7, 8, 9 разъединяется, когда превышен заданный вращающий момент. В этой компоновке, двигатель или двигатели 2 приводов валиков выполнены так, что их максимальный вращающий момент значительно, например в 2 раза или больше, превышает максимальный номинальный рабочий вращающий момент элементов, которые приводятся в действие при помощи привода валика, например, аэродинамически эффективных поверхностей летательного аппарата. В случае заедания двигателя 2 одного привода, двигатель другого привода должен создавать заданный момент включения только в течение короткого периода включения соединения 7, 8, 9, так чтобы разъединить два элемента 7, 8, которые выполнены с возможностью перемещения друг относительно друга, и освободить двигатель 2.
В случае заедания, создается момент за счет соответствующего управления двигателем 2, который превышает момент разъединения разъемного соединения 7, 8, 9, так что статор 13 двигателя 2 перемещается в направлении по окружности в вышеупомянутом угловом диапазон, после чего двигатель 2 освобождается в осевом направлении валика 1.
В показанном примерном варианте, двигатель 2 или двигатели 2 представляют собой электродвигатели, которые содержат статор 13 и ротор 3, причем передающий элемент 4, который входит в зацепление с валиком 1, образован при помощи гайки валика, которая расположена по центру в роторе 3. Таким образом, двигатель 2 устроен таким образом, что его ротор 3 охватывает валик 1 и расположен соосно с ним. Провода 14 питания обмоток статора 13 имеют такую длину, что когда двигатель 2 освобожден в осевом направлении валика 1, тогда указанные провода 14 питания могут следовать за двигателем без их повреждения.
Таким образом, в соответствии с настоящим изобретением предлагается привод валика с электродвигателем, имеющий простую конструкцию, который обеспечивает работу без заедания.
Изобретение относится к моторизованному приводу валика для исполнительного механизма. Моторизованный привод содержит двигатель, который содержит механический передающий элемент, входящий в зацепление с валиком, чтобы приводить в движение указанный валик и создавать относительное перемещение в осевом направлении между валиком и двигателем. Двигатель поддерживается в элементе, закрепленном на месте относительно движения валика, причем указанный элемент поглощает вращающий момент двигателя. Указанный элемент содержит разъемное соединение, которое разъединяется, когда превышен заданный вращающий момент, и освобождает двигатель для свободного движения в осевом направлении валика относительно закрепленного элемента. Техническим результатом является повышение надежности работы привода. 9 з.п. ф-лы, 3 ил.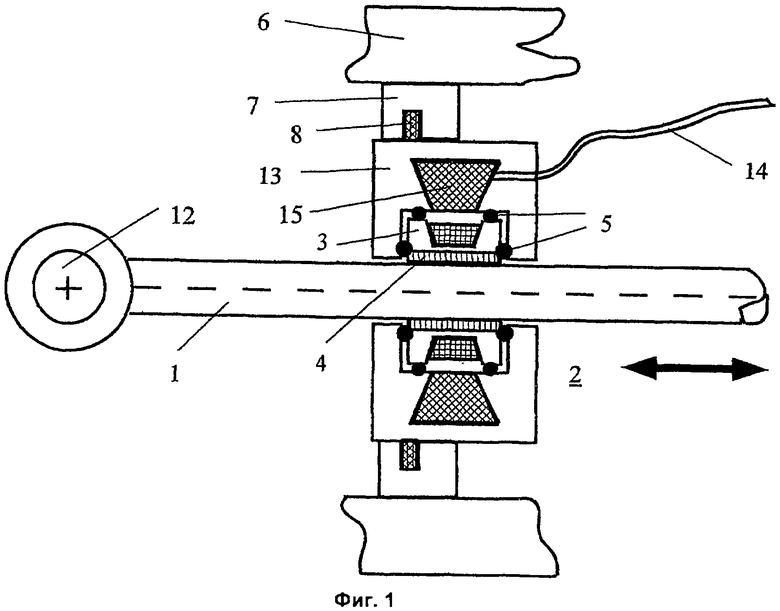
1. Моторизованный привод валика для исполнительного механизма, в особенности для аэродинамически эффективной поверхности летательного аппарата, имеющий валик (1), который поддерживается в элементе (6), закрепленном неподвижно относительно движения валика, двигатель (2), который содержит механический передающий элемент (4), входящий в зацепление с валиком (1) для приведения его в движение и создания относительного движения в осевом направлении между валиком (1) и двигателем (2), и имеющий элемент (6, 7, 8, 9), поглощающий вращающий момент двигателя (2), и содержащий разъемное соединение (7, 8, 9), которое разъединяется, когда превышен заданный вращающий момент, и освобождает двигатель (2) для свободного движения в осевом направлении валика (1) относительно закрепленного элемента (6).
2. Моторизованный привод валика по п.1, отличающийся тем, что разъемное соединение (7, 8, 9) содержит два элемента (7, 8), выполненные с возможностью перемещения относительно друг друга, которые в первом положении блокированы относительно друг друга, так что они введены во взаимное зацепление, чтобы передавать вращающий момент двигателя (2) и создавать относительное движение валика (1), и которые во втором положении разблокированы относительно друг друга и разрешают свободное движение двигателя (2) в осевом направлении валика (1), причем предусмотрено средство, реагирующее на вращающий момент, передаваемый двигателем (2), при этом указанное средство, когда превышен заданный вращающий момент, освобождает элементы (7, 8), которые выполнены с возможностью перемещения относительно друг друга, чтобы перемещать их из первого положения во второе положение.
3. Моторизованный привод валика по п.2, отличающийся тем, что два элемента (7, 8), которые выполнены с возможностью перемещения относительно друг друга, содержат удерживающий элемент (7) с вырезом (9), в котором установлен двигатель (2) с возможностью поворота относительно оси валика по меньшей мере в заданном угловом диапазоне, и содержат по меньшей мере один стопорный элемент (8), который предусмотрен на двигателе (2), расположен в соответствующей выемке (10) в удерживающем элементе (7), выполнен с возможностью перемещения в направлении по окружности и направляется при помощи первой части заданного углового диапазона в направлении взаимного блокирования относительно осевого направления, причем выемка (10) в удерживающем элементе содержит положение расцепления, которое образовано при помощи паза (11), при этом в указанном положении расцепления стопорный элемент (8) освобожден в осевом направлении.
4. Моторизованный привод валика по п.2 или 3, отличающийся тем, что элементы (7, 8), которые разрешают движение элементов, когда превышен заданный вращающий момент, выполнены с возможностью перемещения относительно друг друга из первого положения во второе положение, образованы при помощи фрикционной муфты, которая включена между элементами (7, 8), которые выполнены с возможностью перемещения относительно друг друга.
5. Моторизованный привод валика по п.2 или 3, отличающийся тем, что элементы (7, 8), которые разрешают движение элементов, когда превышен заданный вращающий момент, выполнены с возможностью перемещения относительно друг друга из первого положения во второе положение, образованы при помощи упругого пружинного элемента, который введен между элементами (7, 8), которые выполнены с возможностью перемещения относительно друг друга.
6. Моторизованный привод валика по п.1, отличающийся тем, что двигатель (2) представляет собой электродвигатель.
7. Моторизованный привод валика по п.1, отличающийся тем, что передающий элемент (4), который входит в зацепление с валиком (1), представляет собой гайку (4) валика, которая расположена по центру в роторе (3) двигателя (2).
8. Моторизованный привод валика по п.7, отличающийся тем, что двигатель (2) окружает валик и расположен соосно с ним.
9. Моторизованный привод валика по п.3, отличающийся тем, что предусмотрено разъемное соединение (7, 8, 9), которое содержит стопорный элемент (8), который направляется в выемке (10).
10. Моторизованный привод валика по п.3, отличающийся тем, что предусмотрено разъемное соединение (7, 8, 9), которое содержит два или несколько стопорных элементов (8), каждый из которых направляется в выемке (10), причем указанные стопорные элементы смещены друг от друга по окружности на одинаковые или разные углы.
| US 3714479 A, 30.01.1973 | |||
| Устройство для управления и защиты атомного реактора | 1991 |
|
SU1793477A1 |
| US 4947070 A, 07.08.1990 | |||
| МЕХАНИЧЕСКИЙ НАГРЕВАТЕЛЬ | 2008 |
|
RU2365830C1 |
| Привод перемещений исполнительного органа | 1987 |
|
SU1441119A1 |
| Преобразователь движения | 1985 |
|
SU1295104A1 |

