112951
Изобретение относится к машиностроению, а именно к устройствам для преобразования ОДЕЮГО вида движения в другой или аналогичный, но с иными параметрами.,
Цель изобретения - повышение надежности и нагрузочной способности за счет изменения формы рабочих элементов ,
На фиг.1 изображен преобразова- JQ тель движения для преобразования вращательного движения во вращательное с другой скоростью; на фиг,2 - то же, разрез; на фиг.З - то же, вариант выполнения. 5
Преобразователь движения может быть предназначен для преобразования вращательного движения в возвратно- поступательное и наоборот, вращательного движения во вращательное с дру- 20 гой скоростью, вращательного- движения , в однонаправленное или разнонаправленное прямолинейное перемещение и наоборот, возвратно-поступательного движения в аналогичное с другими цшраметрами однонаправленное прямолинейное перемещение.
В зависимости от вида преобразуемого движения преобразователь движения может иметь различное (не менее двух)30 количество деталей, от вида движения зависит и их форма.
Преобразователь движения содержр Т корпус 1, в котором размещены валы 2 и 3, три детали 4, 5 и 6, Детали 4 35 и 6 выполнены в виде колец и закреплены соответственно на валах 2 и 3. Деталь 5 имеет перемьп-:ку 7,-которая размещена на направляющих 8, установленных в корпусе 1. На каждой детали 40 размещены рабочие элементы. Последние выполнены в виде секторных частей вин тов и гаек, размещенных попарно на каждой детали и в каждой паре имеющих различное направление резьбы. На де- 45 тали 4 размещены секторные части 9 и 10 винтов, на детали 5 - секторные части 11 и 42 гаек, взаимодействующих соответственно с секторными частями 9 и 10 винтов детали 4, а также сеКтор-50 ные части 13 и 14 винтов.
На детали 6 размещены секторные части 15 и 16 гаек, взаимодействующие соответственно с секторными частями 14 винтов детали 5. Число пар 55 секторных частей винтов и гаек, взаимодействующих друг с другом, может быть выбрано в зависимости от требуе- - мого закона возвратно-поступательного
042
движения детали 5, Длина секторных частейвинтов и гаек на деталях 4, 5 и 6 в каждой паре по оси преобразователя движения может быть различна, но обязательно равна длине взаимодействующих с ними секторных, частей, винтов и гаек, размещенных на другой детали и выбирается также в зависимости от требуемого закона преобразования движения.
Перемещение детали 5 ограничивается опорными поверхностями 17 и 18 корпуса, или могут быть применены другие виды упоров (не показаны).
На фиг.З показан вариант выполне- ния преобразователя движения, где механическое взаимодействие деталей заменено магнитным. Для этого секторные части винтов и гаек по крайней мере двух деталей 4 и 5 размещены с радиальным зазором И, и по крайней мере на детали 5 установлена система магнитного возбу)«дения, например, в виде постоянного магнита 19 и (или) подмагничивающих обмоток 20. В ра- диальном зазоре может быть помещена разделительная защитная перегородка (не показана).
Для обеспечения длительного (неограниченного) прямолинейного перемещения по крайней мере одна из дета- Jieй выполнена плоской (например, в виде соответствующей полосы между рельсами), и рабочие элементы размещены на ее плоской поверхности последовательно по ее длине, а вто- рая деталь связ.ана с возвратно-поступательным приводом (не показан).
Для большей надежности работы преобразователя движения за счет гарантированного прохождения его деталью положен ш мертвых точек целесообразно устанавливать параллельно две системы деталей, рабочие элементы которых смещены по фазе .(не показаны)
В качестве ведущих элементов преобразователя могут использоваться любые из деталей 4. 5 или 6,, Движение можно снимать также с любой из указанных деталей. Это обеспечивает возможность присоединения преобразователя движения непосредственно к рабочим частям двигателей без использования дополнительных преобразующих механизмов, например к поршням дви- гателя внутреннего сгорания, к валу ротора или электродвигателя и пр. Вариант с плоским выполнением деталей, в особенности с магнитным воз31295104
буждением, позволяет использовать предлагаемьй преобразователь в комплексе с обычным двигателем практически любого вида вместо линейных электродвигателей, обладающих, особенно при малых скоростях движения, весьма низким значением КПД.
Система магнитного возбуждения имеет и то преимущество, что преобразователь движения может сочетать свойства одновременно преобразователя и муфты предельного моментч. Для повышения КПД магнитное возбуждение целесообразно размещать на тех деталях, взаимное перемещение которых совершается с большей скоростью (меньшим моментом),
Секторные части винтов и гаек могут быть вьтолнены шарнирно-винтовым (не показаны).
Преобразователь движения работает следующим образом.
Например, при ведущей детали 4 вращение секторной части 9 винта преобразуется в осевое перемещение секторной части 11 гайки детали 5 и одновременно самой детали 5. После выхода из зацепления секторных частей
9и 11 практически без промежутка входят в зацепление секторная часть
10винта детали 4 и секторная часть
12 гайки детали 5, и последняя получает перемещение в обратном направлении. Перемещение детали 5 ограни-, чено опорными поверхностями 17 и 18. Взаимодействие детали 5 с деталью 6 происходит в обратном порядке. За . счет различных параметров резьбы секторных частей винтов и гаек деталей происходит преобразование скорости вращения.
Ведущей может быть и деталь 5, В этом случае детали 4 и 6 вращаются с разными скоростями. При плоском выполнении одной из деталей вращение ведущей детали или ее возвратно-поступательное перемещение может быть преобразовано в неограниченное одно
5
0
5
0
5
0
5
направленное или реверсивное (в зависимости от условий работы) линейное перемещение ведомой детали, а при неподвижном закреплении плоской детали может перемещаться основание, например вагон (не показан), на котором крепится привод с ведущей деталью.
Формула изобретения
1.Преобразователь движения, содержащий по крайней мере две детали с рабочими элементами на взаимно обращенных поверхностях, смещенными
по периметру и по оси деталей, отличающийся тем, что, с целью повьпиения надежности и нагрузочной способности, рабочие элементы выполнены в виде секторных частей винтов и гаек, размещенных попарно на каж- цой детали и в кайсдой паре имеющих различное направление резьбы.
2.Преобразователь по п.1, о т - личающийс я тем, что длина секторных частей винтов и гаек в каждой паре по оси различна и равна длине взаимодействующих с ними секторных частей винтов и гаек, размещенных на другой детали.
3.Преобразователь по пп. 1 и 2, отличающийся тем, что по крайней мере взаимодействующие одна с другой секторные части винтов и гаек двух деталей размещены с радиальным зазором и имеют систему магнитного возбуждения.
4.Преобразователь по п.З, отличающийся тем, что он снабжен разделительной защитной перегородкой, размещенной в радиальном зазоре.
5.Преобразователь по пп.1-4, отличающийся тем, что секторные части винтов и гаек размещены на плоских поверхностях деталей.
/J
1578 /« 5
I I / /

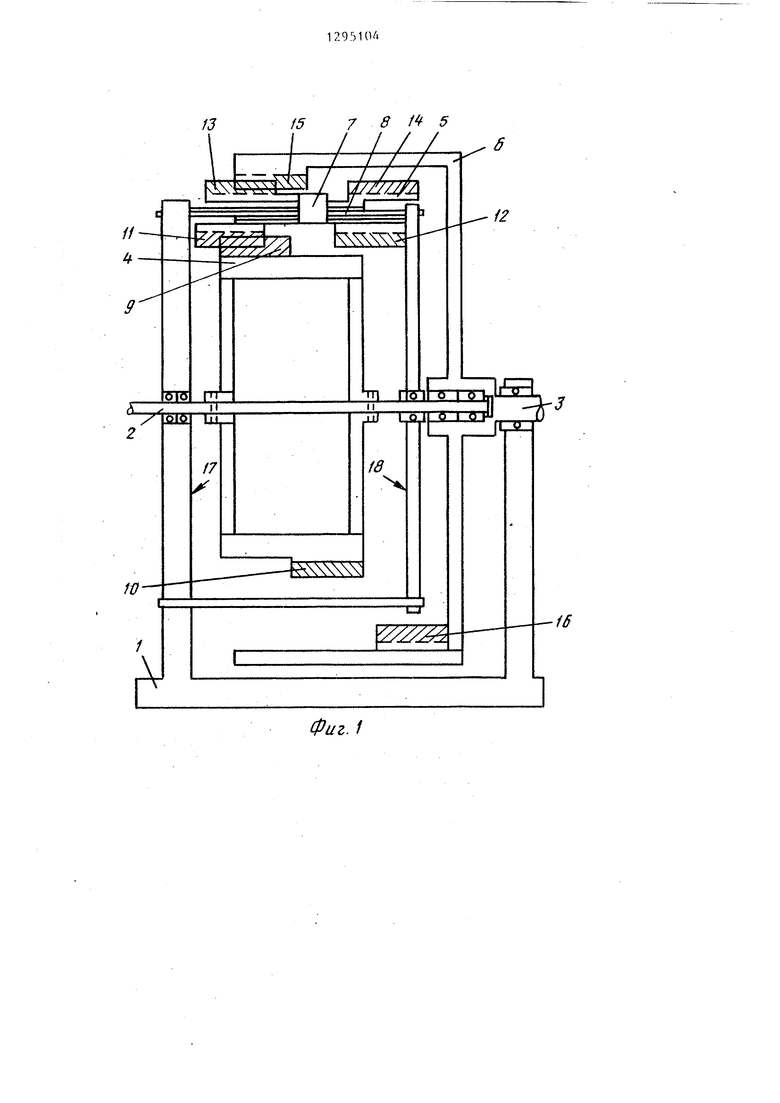

Изобретение относится к машиностроению. Цель изобретения - повьше- ние надежности и нагрузочной способности преобразователя движения. Преобразователь движения содержит корпус 1, размещенные в нем ведущий 2 и ве- домьй 3 валы. На валу 2 размещена деталь 4, а на валу 3 - деталь 6. На взаимно обращенных поверхностях 15 по крайней мере двух деталей размещены рабочие элементы в виде секторных частей, винтов и гаек, размещенных попарно на каждой детали и в каждой паре имеющих различное направление резьбы. При повороте детали 4 секторная часть 9 винта, взаимодействуя с секторной частью 11 гайки детали 5, перемещает последнюю. Это движение продолжается До тех пор, пока секторные части 9 и 11 не выйдут из зацепления. Затем зацепляются секторные части деталей 4 и 5 и деталь 5 перемещается в обратном направлении. Деталь 6 при этом также вращается со скоростью, от1Й1чающейся от скорости вращения детали 4. 4з.п. ф-лы, 3 ил. . с $ (Л ю сд Фиг.З
o
IT
X
L
Г
joJ I.Q.M V i Q
/7
IX
X
j
г. /
Редактор И.Горная
Составитель М.Левинский
Техред Л.Сердюкова Корректор И.Муска
602/41
Тираж 812Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Синусошариковый редуктор для забойных двигателей | 1983 |
|
SU1092266A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
