Область техники
Изобретение относится к посадочному устройству воздушного судна и, в частности, к объединенному двигателю/генератору барабана колеса, способу рекуперативного торможения и/или моторизованного торможения для системы посадочного устройства воздушного судна, которые снижают износ тормозной системы и связанных пневматиков, в то же время повышая устойчивость воздушного судна и сокращая потребности в техническим обслуживании, вызванном износом.
Уровень техники
Как известно, в области сборок колесных шасси и тормозных систем воздушных судов для обеспечения неповоротной опорной стойки колеса, колесо прикрепляют к опорной стойке колеса для вращения, и комплект дисков тормоза использует фрикционное торможение, преобразовывая вращательное движение дисков в энергию теплоты трения, которая вызывает износ дисков. Известны различные конфигурации и способы приведения в действие тормозов, например, такие как раскрытые в патентах США №№ 4381049, 4432440, 4542809, 4567967, 4596316, 4865162 и 6615958.
В современном состоянии техники для обеспечения тормозных систем для воздушного судна используют статоры и роторы, которые вводятся в физический контакт друг с другом, таким образом производя теплоту трения, которая приводит к износу соответствующих дисков и требует периодического ремонта для замены изношенных деталей.
Основной недостаток углеродных дисковых тормозов последних конструкций заключается в том, что необходим больший объем углеродного материала, чтобы абсорбировать такое же количество тепловой энергии, как абсорбируется в стальных дисковых тормозах. Другой недостаток углеродных дисковых тормозов заключается в снижающейся эффективности торможения вследствие влагосодержащего загрязнения углеродных поверхностей из-за дождя и высокой стоимости замены после их износа.
Кроме того, воздушным судам требуется маневрировать в пределах заданных рулений, взлетно-посадочных полос и аэровокзалов. Одним таким требованием является разворот на 180 градусов, который устанавливает верхний предел воздушному судну, допускаемому для конкретной взлетно-посадочной полосы, на основании ширины взлетно-посадочной полосы и способности упомянутого воздушного судна выполнять на ней разворот на 180 градусов в пределах физической ширины упомянутой взлетно-посадочной полосы. Современное посадочное устройство обеспечивает ограниченные возможности для выполнения таких разворотов на 180 градусов.
Одно значительное беспокойство в конструкции тормоза воздушного судна вызывает рассеяние кинетической энергии воздушного судна внутри тормозной системы в системе посадочного устройства во время условий приземления или прекращения взлета. В конечном счете, между пневматиками и посадочной поверхностью присутствует трение качения, которое замедляет воздушное судно, таким образом, требуемая энергоемкость тормозов основана на максимальном посадочном весе воздушного судна и трении качения. Тормозные системы согласно предшествующему уровню техники являются сравнительно негибкими относительно способа, которым они производят требуемое тормозное усилие.
Цели изобретения
Соответственно, целью изобретения является создание улучшенной системы и способа для торможения и маневрирования в посадочном устройстве воздушного судна.
Дополнительной целью изобретения является устранение ограничений и недостатков, связанных с системами согласно предшествующему уровню техники для торможения и маневрирования в посадочном устройстве воздушного судна.
Дополнительной целью изобретения является снижение износа компонентов, содержащихся в системе посадочного устройства и торможения, повышение устойчивости конструкции воздушного судна и увеличение надежности, при сокращении необходимого технического обслуживания, связанного с современными системами фрикционного торможения.
Дополнительной целью изобретения является снижение потребности в дисках фрикционного тормоза в посадочном устройстве воздушного судна.
Еще одной дополнительной целью изобретения является создание системы и способа для получения кинетической энергии от воздушного судна и преобразования такой энергии в электрическую энергию.
Еще одной дополнительной целью изобретения является создание системы и способа для посадочного устройства воздушного судна, которые допускают уменьшенный радиус разворота для воздушного судна.
Другой целью является снижение износа пневматиков воздушного судна, обусловленного трением скольжения вследствие приземления, посредством тщательной подгонки радиальной скорости пневматиков посадочного устройства с относительной путевой скоростью таким образом, чтобы при посадке разность в скоростях была в значительной степени снижена до минимума, тем самым значительно снижая износ от трения скольжения упомянутых пневматиков, связанный с касанием пневматиков посадочного устройства поверхности взлетно-посадочной полосы. Это трение скольжения, которое присутствует в современном уровне техники, создает связанный с ним износ, который воздействует на характеристики пневматиков, таким образом влияя на надежность.
Дополнительной целью является создание средства движущей силы для проведения руления и выполнения наземных маневров воздушного судна, которое способствует увеличению эффективности, маневренности, устойчивости и надежности воздушного судна.
Дополнительной целью является создание средства движущей силы для помощи при взлете, которое снижает требуемую взлетную дистанцию для воздушного судна, а также способствует увеличению эффективности, маневренности, устойчивости и надежности воздушного судна.
Краткое описание изобретения
Согласно настоящему изобретению создано уникальное средство торможения воздушного судна, в котором использование рекуперативного торможения и/или моторизованного торможения применяется способом, который создает преимущества над системами фрикционного торможения согласно предшествующему уровню техники. Это выполнено посредством объединения двигателя/генератора барабана колеса внутри конструкций колес и валов, в которых предусмотрено тормозное действие посредством взаимодействий магнитных моментов дисковых секций статоров и роторов двигателя/генератора барабана колеса. Кинетическая энергия воздушного судна преобразуется в электрическую энергию, которая может рассеиваться через резистор и/или запасаться для последующего использования, когда воздушное судно выполняет взлет, руление и другие наземные маневры, или может использоваться при приземлении для увеличения эффективности системы электромагнитного торможения, устанавливая использование действия моторизованного торможения, таким образом увеличивая общую эффективность тормозной системы и повышая устойчивость и надежность воздушного судна.
Кроме того, было установлено, что другие присутствующие признаки имеют применения для снижения износа пневматиков посадочного устройства воздушного судна, используя двигатель/генератор барабана колеса в качестве двигателя до приземления, чтобы согласовать радиальную скорость пневматиков с относительной путевой скоростью так, что когда происходит посадка, имеется минимальная разность в этих двух скоростях, и таким образом, износ трения скольжения в значительной степени снижен до минимума, тем самым улучшая срок службы пневматиков посадочного устройства и таким образом повышая характеристики упомянутых пневматиков посадочного устройства, что повышает управляемость и надежность воздушного судна. Имеется дополнительная выгода, заключающаяся в том, что когда колеса посадочного устройства приводят в движение в полете, они обеспечивают гироскопический стабилизирующий эффект, который существенно стабилизирует воздушное судно в зависимости от частоты вращения колес посадочного устройства.
В одном варианте осуществления изобретения комплект дисков двигателя/генератора барабана колеса включает в себя чередующиеся диски роторов и статоров, причем каждый диск ротора присоединен к колесу для вращения, а каждый диск статора присоединен к валу и/или корпусу тормоза колеса для опоры, который является неподвижным относительно вращения пневматика. В предпочтительном варианте осуществления изобретения двигатель/генератор барабана колеса функционирует как тормоз посредством действия генератора, также известного как рекуперативное торможение, в котором взаимодействия магнитных моментов между секциями дисков роторов и дисков статоров прикладывает тормозное усилие к узлу колеса и пневматика, а генерируемая электрическая энергия сохраняется для более позднего использования.
Двигатель/генератор барабана колеса может иметь прикрепленное к нему множество связанных элементов дисков статоров и роторов, которые можно активировать или дезактивировать по отдельности, последовательно или вместе с применением электрического тока или генерированием электрического тока в изменяющихся направлениях в зависимости от потребности в приведении в движение и/или регенеративном и/или моторизованном торможении. В одном таком случае электромагнитное торможение применяется посредством использования связанных дисков роторов и статоров в качестве генератора и от которого выходная мощность от статора подается на другой диск статора таким образом, чтобы увеличить тормозящее действие связанного ротора упомянутого другого диска статора, таким образом выполняя действие моторизованного торможения или приводя в движение диск или диски, который действует как генератор в пределах комплекта дисков того же или другого двигателя/генератора барабана колеса, в котором действует генерирующий диск или диски.
Способ электрических взаимодействий двигателя/генератора различных диска или дисков статоров в пределах того же самого или другого комплекта дисков двигателя/генератора барабана колеса или способ моторизованного торможения, как раскрыто в данном описании, может различаться многочисленными комбинациями диска или дисков генератора и диска или дисков двигателя в пределах настоящего изобретения и является уникальным в области осевых двигателя/генераторов дискового типа, обеспечивая гибкость в применениях в воздушных судах и возможность электрического и/или физического добавления диска или дисков или удаления диска или дисков, основываясь на посадочном весе воздушного судна и/или потребностях конструкции посадочного устройства. Эта электрическая взаимосвязь дисков, в которой любой диск внутри комплекта дисков двигателя/генератора барабана колеса может действовать как двигатель или как генератор, или в любой их комбинации, известна как способ моторизованного торможения, как предложено в настоящем изобретении, который добавляет гибкость при конструировании посадочного устройства воздушного судна. Внедрение использования осевого двигателя/генераторов дискового типа значительно снижает стоимость конструкции благодаря их гибкости при приведении в движение и торможении упомянутого двигателя/генератора.
Как отмечено выше, одна задача в конструировании тормоза воздушного судна заключается в рассеянии кинетической энергии воздушного судна в пределах тормозной системы в системе посадочного устройства во время условий приземления или прекращения взлета; в конечном счете, именно присутствие трения качения между пневматиками и посадочной поверхностью замедляет воздушное судно и, таким образом, требуемая энергоемкость тормозов основана на максимальном посадочном весе воздушного судна и трении качения. Способ моторизованного торможения в соответствии с изобретением вносит гибкость в генерирование требуемого тормозного усилия, которой недостает в тормозных системах современного уровня техники, и обеспечивает более эффективные конструкции, в которых перегруженное воздушное судно может увеличивать эффективность торможения посредством изменения электрических соединений через устройство управления переключением, таким образом повышая надежность воздушного судна.
Кроме того, посредством реализации использования осевых двигателя/генераторов барабана колеса дискового типа в посадочном устройстве, воздушное судно способно снижать радиус разворота, при котором разворот на 180 градусов может быть выполнен с помощью приведения в движение одного набора посадочного устройства в одном направлении и приведения в движение другого набора посадочного устройства в противоположном направлении, таким образом этот способ выполнения разворота позволяет воздушному судну выполнять разворот на 180 градусов в пределах меньшего радиуса разворота в отличие от способа современного уровня техники посадочных устройств вследствие того, что центр вращения согласно настоящему изобретению расположен между основным посадочным устройством на осевой линии воздушного судна, а не в пересечении линий, проходящих от осей носового шасси и посадочного устройства как имеет место в посадочном устройстве согласно современному уровню техники. Этот признак обеспечивает уменьшенный износ поверхности взлетно-посадочной полосы благодаря отсутствию необходимости блокировать тормоза на поворачивающем узле посадочного устройства и исключает связанный с этим износ пневматиков поворачивающего узла посадочного устройства из-за трения скольжения, который присутствует в современном уровне техники.
Краткое описание чертежей
Далее изобретение описано более подробно на примере варианта осуществления изобретения, показанного на прилагаемых чертежах, на которых:
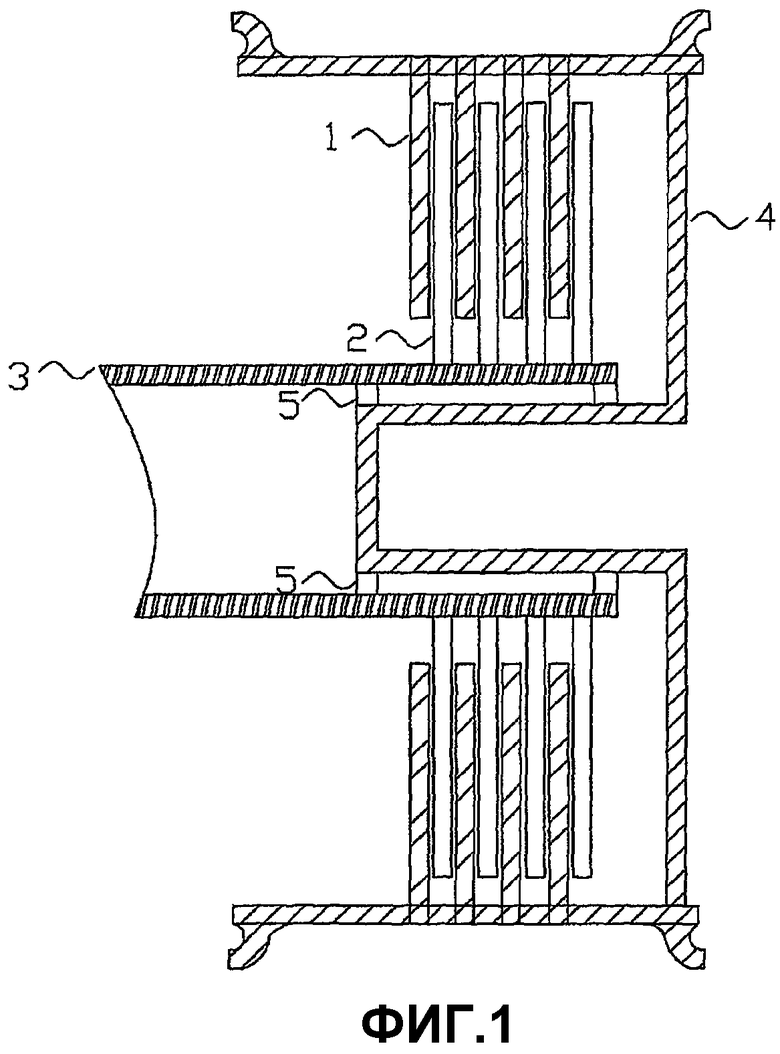
Фиг.1 - вид в поперечном сечении варианта осуществления осевого двигателя/генератора барабана колеса дискового типа в соответствии с настоящим изобретением;
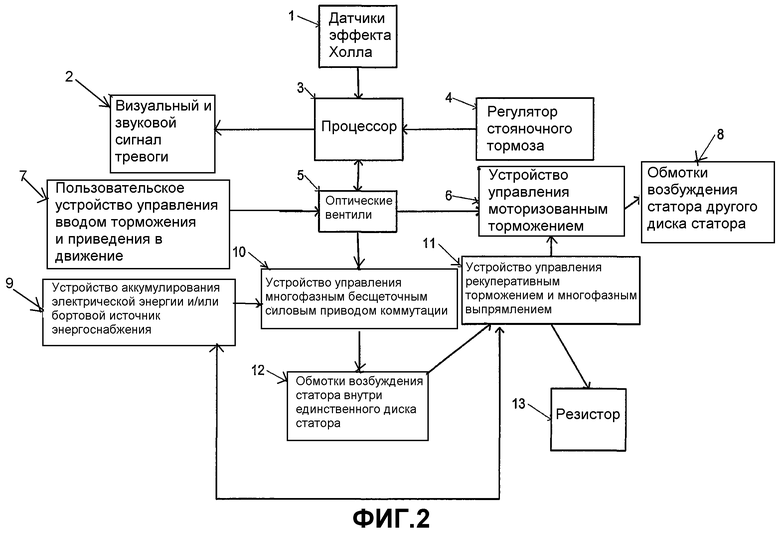
Фиг.2 - блок-схема, представляющая одну возможную реализацию устройства управления переключением, используемого для реализации способа посадочного устройства в соответствии с настоящим изобретением;
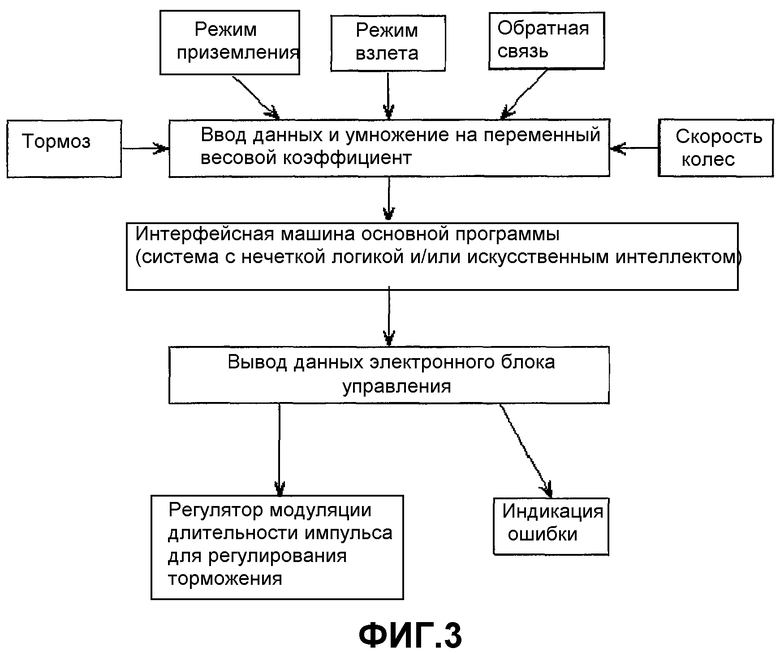
Фиг.3 - блок-схема, иллюстрирующая способ и устройство для управления ABS (Антиблокировочной Тормозной Системой) нечеткой логики в соответствии с настоящим изобретением.
Описание предпочтительного варианта осуществления изобретения
На фиг.1 показан вид в поперечном сечении возможного двигателя/генератора барабана колеса осевого типа с комплектом дисков, используемого для выполнения необходимого электромагнитного торможения и/или приведения в движение колес посадочного устройства. Роторы 1 подсоединены к колесу 4 и вращаются вместе с колесом 4. Диски 2 статоров, которые могут быть выполнены из электропроводного материала, подсоединены к валу 3 и/или центральному корпусу тормоза колеса и являются неподвижными относительно колеса, при этом диски электрически изолированы друг от друга за исключением сквозных возможных электрических соединений (не показаны). Диски 1 роторов, которые могут быть выполнены из электропроводного материала или из постоянных магнитов, подсоединены к колесу 4. Колесо 4 поддерживается посредством набора 5 подшипников, который может состоять из наборов внутренних и внешних подшипников или подшипника втулочного, воздушного или магнитного типа.
В предпочтительном варианте осуществления, перед касанием земли при посадке, колесо 4 приводят в движение, применяя энергию с помощью радиального прохождения электрического тока через диск 2 статора, который производит осевое поле магнитного потока, взаимодействующее с осевым полем магнитного потока постоянных магнитов диска 1 ротора, которые имеют высокую плотность энергии, типа неодима, которая по существу расположена внутри диска 1 ротора с осевой ориентацией магнитного потока, в которой все постоянные магниты находятся в одном и том же векторном направлении. Этот вариант осуществления изобретения развивает магнитный момент между диском 1 ротора и диском 2 статора, который заставляет колесо 4 испытывать воздействие двигателя. Диск 2 статора и/или диск 1 ротора могут быть выполнены из алюминия, который может быть покрыт медью, которая может быть дополнительно покрыта серебром, и/или могут быть образованы из любой другой комбинации сплавов, такой как бериллий, медь и/или проводящий полимер для повышения прочности. Требуемые электрические соединения не показаны, поскольку обеспечение электрических соединений известно. Такое электрическое соединение может включать в себя, например, катящиеся контакты и/или скользящие угольные щетки. Как вариант, для выполнения действия двигателя/генератора благодаря описанным в данном описании взаимодействиям осевых магнитных потоков можно использовать бесщеточную конструкцию.
На Фиг.2 проиллюстрирован маршрут сигналов системы управления переключением и сигналов мощности, используемый для выполнения необходимых сигналов, чтобы управлять приведением в движение и/или торможением двигателя/генератора барабана колеса посадочного устройства воздушного судна в бесщеточной конструкции.
В случае обеспечения действия двигателя для двигателя/генератора барабана колеса используют датчики 1 эффекта Холла, чтобы указывать позицию постоянных магнитов внутри диска ротора, причем магниты представляют собой чередующиеся северные и южные полюсы с магнитным потоком, выровненным по оси и выровненным со связанными обмотками возбуждения статора. Информация о позиции диска ротора посылается в процессор 3 для надлежащей синхронизации управляющих сигналов, которые посылаются в оптические вентили 5, которые затем посылаются в устройство 10 управления многофазным бесщеточным силовым приводом коммутации, которое подает мощность от устройства аккумулирования электрической энергии и/или бортового источника 9 энергоснабжения к обмоткам возбуждения статора внутри единственного диска 12 статора так, что действие двигателя производится либо в прямом, либо в обратном направлении, в зависимости от ввода от пользовательского устройства 7 управления вводом торможения и приведения в движение, которое передает информацию в процессор 3 через оптические вентили 5, например, инициировать ввод пользователя для прямого или реверсивного действия двигателя в двигателе/генераторе барабана колеса, и ввода от регулятора 4 стояночного тормоза в процессор 3 так, что он указывает, подключена ли стояночная тормозная система или нет. Сигнализация 2 активируется, если стояночный тормоз подключен, а ввод пользователя от пользовательского устройства 7 управления вводом торможения и приведения в движение инициирует действие двигателя. Если стояночный тормоз отключен, процессор 3 обеспечит возможность действия двигателя в прямом или обратном направлении согласно вводу пользователя от пользовательского устройства 7 управления вводом торможения и приведения в движение.
В случае обеспечения действия генератора от двигателя/генератора барабана колеса обеспечивается подключение электрической энергии от обмоток возбуждения статора внутри единственного диска 12 статора к устройству 11 управления рекуперативным торможением и многофазным выпрямлением, и поскольку происходит относительное движение между секциями статоров и роторов, внутри катушек обмоток статора барабана колеса двигателя/генератора генерируется многофазный сигнал мощности, и этот сигнал мощности посылается в устройство 11 управления рекуперативным торможением и многофазным выпрямлением, которое преобразовывает изменяющийся многофазный сигнал мощности в сигнал постоянного тока на основании управляющих сигналов, формируемых в процессоре 3, которые зависят от входных управляющих сигналов пользователя, поступающих от пользовательского устройства 7 управления вводом торможения и приведения в движение. Если управляющий сигнал процессора является таким, что требуется аккумулирование электрической энергии и/или рассеяние мощности, тогда сигнал мощности постоянного тока посылается от устройства 11 управления рекуперативным торможением и многофазным выпрямлением в устройство аккумулирования электрической энергии и/или бортовой источник 9 энергоснабжения для более позднего использования, и/или посылается на резистор 13 рассеяния мощности для рассеяния генерируемой электрической энергии. Устройство 11 управления рекуперативным торможением и многофазным выпрямлением также можно использовать для обеспечения многофазной электрической энергии для устройства 6 управления моторизованным торможением, которое управляется управляющими сигналами процессора 3 в применении указаний о выполнении моторизованного торможения, как описано в предпочтительном варианте осуществления, в котором многофазные сигналы мощности подаются на обмотки возбуждения статора другого диска 8 статора внутри того же самого или другого комплекта дисков двигателя/генератора барабана колеса, например, для подачи электрической энергии на обмотки возбуждения статора другого диска 8 статора, которые испытывают действие генератора, таким образом увеличивая тормозящее действие с помощью приведения в движение диска в противоположном направлении относительно направления вращения ротора, таким образом обеспечивая действие моторизованного торможения, которое является уникальным в области бесщеточных осевых двигателей и генераторов.
Известны бесщеточные осевые двигатели и генераторы, в которых применяется использование сегментированных секций роторов и статоров. Разновидности бесщеточных осевых двигателей и генераторов описаны в следующих патентах США №№ 4223255, 4567391, 4585085, 6046518, 6064135, 6323573 B1, 6617748 B2 и 6633106 B1, а также в публикациях заявок US 2003/0159866 А1 и US 2002/0171324 А1. Любые двигатель/генератор осевого типа, также известные как дисковые или укороченные двигатели, можно использовать при внедрении способа моторизованного торможения, как описано в данном патенте, включая те патенты, которые еще должны быть выданы. Роторы или статоры в общем состоят из сегментов постоянных магнитов так, что там существуют чередующиеся северные и южные полюса с магнитным потоком, выровненным по оси. Секции роторов или статоров в основном состоят из катушек обмоток статора или ротора внутри единственного диска статора или ротора, прикрепленного к диску статора или ротора, с датчиками эффекта Холла, которые прикреплены к диску статора или ротора, который сегментирован так, чтобы выравнивать наборы катушек обмоток с наборами постоянных магнитов, используемых внутри ротора или статора. Для катушек обмоток статора или ротора внутри единственного диска требуется управляемое применение токов для упомянутых катушек обмоток от устройства управления многофазным бесщеточным силовым приводом коммутации, например, чтобы вызывать действие приведения в движение. Управляющие сигналы, подаваемые на такие устройства управления многофазным бесщеточным силовым приводом коммутации, производятся от процессора через оптический вентиль, используя информацию о позиции, обеспечиваемую датчиками эффекта Холла. Такие бесщеточные двигатели также могут использоваться при рекуперативном торможении, чтобы подавать электрический ток посредством действия генератора, а путь электрического тока обеспечивается посредством электрического устройства управления переключением, в котором генерируемая электрическая энергия сохраняется для последующего использования через систему управления.
Возможные формы осевых двигателей и/или генераторов могут быть получены в итоге следующим образом. В общем, обмотки могут быть либо неподвижными, либо вращательными, и эти обмотки могут быть встроены в следующие структуры. Одна такая возможная структура представляет собой материал шихтованного стального сердечника с пазами или составного стального сердечника с обмотками, расположенными внутри пазов. Другой возможной структурой является структура без пазов, в которой обмотки намотаны в катушки обмоток, которые внедрены в структуры без сердечников, типа угольной щетки, или могут быть намотана вокруг материала шихтованного или составного стального сердечника. Дополнительная возможная структура представляет собой сплошную структуру, в которой индуцированные токи циркулируют внутри сплошного проводящего материала, который может быть или нет ферромагнитным материалом. Обмотки для дисковой конструкции могут иметь тип печатной схемы и/или могут быть штампованными из листовой меди, и/или могут быть медными обмотками, намотанными в отдельные катушки обмоток, которые могут быть или нет выполненными из многожильного провода.
Использования
Сразу после касания земли двигатель/генератор барабана колеса, который используется как двигатель, может быть преобразован так, чтобы использоваться в качестве генератора, посредством прекращения прикладывания мощности к диску статора и извлечения мощности от диска статора благодаря действию генератора, которое происходит, когда магнитное поле диска ротора находится в относительном движении с магнитным полем диска статора, такое относительное движение обусловлено кинетической энергией воздушного судна и благодаря использованию известного действия электрического переключения и устройства управления, такого как управляемые с помощью электроники переключатели типа биполярный транзистор с изолированным затвором (IGBT) или тиристор с интегрированным управлением (IGCT), и/или реле электромеханического типа, так что генерируемая электрическая энергия может сохраняться как при рекуперативном торможении, и/или рассеиваться, как при динамическом торможении, и/или применяться для другого диска статора, что увеличивает тормозящее действие посредством моторизованного торможения.
Генерируемый электрический ток от диска статора может сохраняться на воздушном судне с помощью аккумуляторной батареи, батарей конденсаторов или других соответствующих устройств накопления и хранения электрической энергии, таких как гироскоп и/или тороидальная катушка или катушки, которые электрически подсоединены к диску статора через устройства управляющей электроники и/или физические контакты, таким образом обеспечивая возможность рассеяния и/или сохранения генерируемой электрической энергии для поставки электрической энергии для последующего использования.
Электромагнитное торможение в этом способе моторизованного торможения предпочтительно применяется посредством использования соответствующего диска или дисков ротора и статора в качестве генератора, выход которого подается на другой диск или диски статора, который тогда производит действие приведения в движение, которое является прямо противоположным направлению вращения колеса, которое производит действие моторизованного торможения, превышающее действие одного рекуперативного торможения, таким образом уменьшая тормозной путь и повышая надежность воздушного судна.
Способ моторизованного торможения предпочтительно выполняется с помощью двух средств. Первое средство является генерируемой электрической энергии от одного диска статора из-за относительного движения связанного диска ротора, которую можно применять к другому диску статора внутри комплекта дисков двигателя/генератора барабана колеса таким образом, чтобы увеличивать тормозящее действие посредством приведения в движение другого соответствующего диска ротора другого диска статора в противоположном направлении, таким образом выполняя моторизованное торможение или приводя в движение диск или диски внутри того же или другого комплекта дисков двигателя/генератора барабана колеса, как генерирующего диска или дисков. Второе средство использует сохраненную и/или генерируемую на борту и/или от внешнего источника электрическую энергию, так что энергия подается на диск статора через обеспечиваемые электрические соединения так, что действие приведения в движение применяется к дискам роторов в направлении, противоположном направлению вращения колеса, таким образом выполняя моторизованное торможение или приведение в движение диска или дисков внутри двигателя/генератора барабана колеса. Приведенные выше два средства могут быть объединены для осуществления заданного торможения.
Осевой двигатель/генератор барабана колеса можно использовать для обеспечения действия приведения в движение для колес посадочного устройства воздушного судна, таким образом обеспечивая гироскопическое стабилизирующее воздействие на воздушное судно. В последовательности действий при посадке воздушное судно должно развернуть посадочное устройство и затем применять прямое вращательное движение к колесам посадочного устройства воздушного судна, которое стабилизирует воздушное судно благодаря гироскопическому эффекту, таким образом повышая устойчивость и надежность воздушного судна.
Другой вариант осуществления использует индукционное торможение, а не электромагнитное торможение, в котором диск ротора выполнен из алюминия, алюминиевого сплава, стали, меди, бериллия, серебра или любой их комбинации, в виде различных конструкций, а диск статора может быть выполнен так, как описано выше для электромагнитов согласно предыдущему предпочтительному варианту осуществления изобретения, в котором торможение выполняется посредством приложения электрического тока к диску статора таким образом, что магнитное поле диска статора индуцирует вихревые токи внутри диска ротора так, что там развивается магнитный момент, который производит действие торможения на колесе воздушного судна.
Любую комбинацию упомянутых вариантов осуществления изобретения можно использовать в дополнение к системам фрикционного торможения, используемым в настоящее время, таким образом увеличивая срок службы и способствуя пригодности системы фрикционного торможения, а также сокращая стоимость технического обслуживания посредством снижения скорости износа и количества требуемых фрикционных дисков. Также в упомянутых вариантах осуществления и комбинациях вариантов осуществления можно применять, при необходимости, системы охлаждения, используемые для систем фрикционного торможения.
При приземлении пилот приводит в действие посадочное устройство, и на двигатель/генератор барабана колеса посадочного устройства подается мощность устройством управления вводом от пилота так, чтобы вызвать прямое вращение пневматиков посадочного устройства. Частота вращения пневматика посадочного устройства при приземлении со скоростью 130 миль в час для обычного воздушного судна 747 может составлять приблизительно 48 рад/сек, чтобы согласовать скорость пневматиков и путевую скорость, таким образом значительно сокращая износ трения скольжения упомянутых пневматиков. Сразу после касания земли системы управления используются для сохранения генерируемой электрической энергии от двигателя/генератора барабана колеса, таким образом обеспечивая рекуперативное торможение. Затем через несколько минут запасенная энергия подается в двигатели барабана колеса через систему управления, чтобы вызвать действие приведения в движение в противоположном направлении относительно направления вращения ротора, таким образом обеспечивая моторизованное торможение. Чтобы заставить воздушное судно полностью остановиться, можно использовать моторизованное торможение и отключение, когда движение вперед остановлено, а затем подать постоянный ток, который можно подавать на диск статора так, что каждая обмотка возбуждения статора сможет поддерживать магнитный поток, присутствующий благодаря магнитному потоку постоянного магнита ротора, который также может использоваться для применения тормозного усилия стояночного тормоза к колесам посадочного устройства при стоянке на терминале.
При взлете пилот инициирует устройство управления вводом так, чтобы вызвать прямое вращение пневматиков посадочного устройства и включить реактивные двигатели. Это заставит воздушное судно перемещаться по взлетно-посадочной полосе быстрее, чем с использованием одних реактивных двигателей, таким образом сокращая необходимую дистанцию взлетно-посадочной полосы для взлета для конкретного воздушного судна.
В случае прерванного взлета все тормозные системы будут участвовать в маневре таким образом, чтобы увеличить до максимума эффективность торможения воздушного судна.
В случае выполнения маневра на земле, представляющего разворот на 180 градусов, пилот инициирует устройство управления вводом так, что вызывает запитывание одного набора посадочного устройства в прямом направлении, а запитывание другого набора посадочного устройства в противоположном направлении, таким образом выполняя разворот воздушного судна, который завершается под управлением пилота.
В случае действий авианосца мощность обеспечивается и от внешнего источника электрической энергии через крепление к воздушному судну, типа крепления, которое используется для приведения в движение или запуска воздушного судна с авианосца. Средство электрического соединения может быть соединителем прямого физического контакта или бесконтактного типа, использующим магнитную индукцию для передачи энергии от наземной линии на воздушное судно. При такой реализации в коммерческом воздушном судне наземные линии могут быть встроены во взлетно-посадочные полосы аэропорта, например, чтобы обеспечить возможность передачи и/или подачи энергии для средства, причем персонал управления воздушным судном может непосредственно управлять наземными перемещениями воздушного судна, управляя энергией, передаваемой на двигатель/генератор барабана колеса воздушного судна, таким образом увеличивая уровень управления для персонала управления воздушным судном.
Другие варианты осуществления находятся в объеме настоящего изобретения. Например, система может быть очень гибкой в управлении, типа обеспечения возможности одному набору дисков статора-ротора иметь возможность снабжать электрической энергией другой набор дисков статора-ротора, например, для выполнения моторизованного торможения. Моторизованное торможение может быть выполнено посредством приложения вращающего момента в противоположном направлении относительно направления вращательного движения, обусловленного приземлением.
Одно возможное использование может быть следующим: при приземлении колеса могут набирать обороты, достигающие посадочной скорости, и в момент после приземления использование мощности может быть прекращено, и колеса будут действовать как генераторы. Система может сохранять эту энергию, и затем через несколько минут запасенная энергия может быть применена к наборам роторов-статоров, например, прикладывая момент вращения в противоположном направлении вращения, таким образом выполняя моторизованное торможение. Это может производить нелинейную характеристику вращающего момента при приземлении, которая может полностью управляться компьютером для увеличения эффективного уровня торможения.
В качестве другого примера, настоящее изобретение не обязательно должно использовать осевые двигатели. Любое известное в технике электрическое устройство двигателя-генератора можно применять к различным раскрытым вариантам осуществления узла посадочного устройства, чтобы достигнуть их соответствующих выгод.
Помимо перечисленных преимуществ, таких как способность управления величиной торможения в зависимости от напряжения, приложенного к наборам роторов-статоров, настоящее изобретение включает в себя другие преимущества. Например, там, где два или больше колес основной опоры шасси могут вращаться дифференцированно и/или в противоположных направлениях, “радиус разворота” или ширина взлетно-посадочной полосы, необходимая воздушному судну для разворота на 180°, уменьшена, таким образом делая доступными меньшие посадочные полосы, которые иначе не были бы доступны для воздушного судна. Это в свою очередь обеспечивает воздушным судам выбор более прямых траекторий перемещения, и при этом они смогут полагаться на дополнительные посадочные полосы в случае аварии, таким образом снижая полетное время и расход топлива.
В качестве другого примера преимущества, руление, выполняемое воздушными судами, в частности, реактивными воздушными судами, является очень неэффективным, поскольку коэффициент полезного действия реактивного двигателя увеличивается с увеличением скорости. Поэтому способность наборов статоров-роторов преобразовывать электрическую энергию (сохраненную либо на борту воздушного судна в устройстве накопления и хранения электрической энергии, либо за бортом, и передаваемую, например, посредством магнитной индукции) в энергию вращения колеса может облегчать некоторые виды неэффективности действия реактивных двигателей воздушного судна на низких скоростях. Далее, мало того, что приводимые в действие электричеством колеса могут использоваться при рулении и помогать при взлете, но они также могут снижать или исключать необходимость в буксировочных двигателях, которые традиционно используются для перемещения воздушных судов способами, являющимися затруднительными (например, при движение задним ходом).
В качестве другого примера преимущества, способность системы набирать обороты колес посадочного устройства, достигающие скорости, приблизительно соответствующей скорости воздушного судна после приземления, которая снижает “сотрясение” или удар, следующий, как правило, когда неподвижные колеса воздушного судна обычно быстро и интенсивно ускоряются при приземлении воздушного судна. Сокращение или исключение этого сотрясения имеет преимущества дополнительного комфорта для пассажиров, снижения износа пневматиков и посадочной полосы, а также может обеспечивать гироскопический стабилизирующий эффект.
Действие двигателя в двигателе/генераторе барабана колеса может использоваться в качестве источника движущей силы для развертывания или выпуска посадочного устройства при подготовке к приземлению или для убирания посадочного устройства после взлета, при котором действие двигателя передается через механическое соединение, чтобы вызвать установку в требуемое положение и блокирование посадочного устройства. Такая система может быть реализована с использованием винтового приводного механизма или другого такого механического средства для обеспечения передачи перемещения от двигателя/генератора барабана колеса к перемещению стоек посадочных устройств или опорного узла в нижнюю и блокированную позицию в случае приземления и в верхнюю и закрепленную позицию после взлета.
Другие применения настоящего изобретения включают в себя следующие. Во-первых, узел может включать в себя как переднюю опору шасси, так и основную опору шасси. Передняя опора шасси может иметь многие или все из тех же признаков, что и у основной опоры шасси, такие как один или более двигателей-генераторов (таких как осевые двигатели-генераторы), которые могут управляться процессором. Далее, передняя опора шасси может содержать два или более колес, которые могут вращаться дифференцированно, в зависимости от управляющего сигнала от пользователя и обрабатываемого процессором.
Предшествующие способы управления воздушным судном заключаются в дифференциальном торможении и/или в выполнении разворота передней опоры шасси. Дифференциальное торможение использует применение тормозов на одной стороне воздушного судна или на другой, в зависимости от требований, чтобы повернуть воздушное судно, наряду с вводом от пилота направления передней опоры шасси посредством ввода от штурвала и/или руля направления. Дифференциальное торможение служит причиной серьезной эрозии грунта или взлетно-посадочной полосы, и его постоянное использование может приводить к выходу из строя посадочного устройства. Углы разворота переднего колеса согласно предшествующему уровню техники ограничены углом плюс или минус 60 градусов, что продиктовано имеющимися устройствами, такими как пушпульные привода, механизм реечной передачи, вращательные привода и множительные механические системы связи, которые испытывают износ, требующий технического обслуживания. Такие механические приводы могут вызывать перемещение передней опоры шасси в полете, если выйдет из строя сама система центрирования.
Вращение двух или более колес передней опоры шасси дифференцированно обеспечивает выполнение разворота передней опоры шасси, только когда пневматики находятся в физическом контакте с грунтом или взлетно-посадочной полосой, который обеспечивает требуемый вращающий момент, чтобы управлять колесами без какого-либо движения воздушного судна вперед. Это управление может быть выполнено посредством приведения в движение одного носового двигателя/генератора барабана колеса в одном направлении и приведения в движение другого носового двигателя/генератора барабана колеса в другом направлении, таким образом обеспечивая возможность установки передней опоры шасси в любое требуемое пилотом положение посредством штурвала. Как вариант, соответствующие носовые двигатели/генераторы барабана колеса можно поворачивать в одном и том же направлении с разными скоростями.
Таким образом, этот новый способ управления обеспечивает улучшение маневренности и уменьшение веса, наряду с дополнительным повышением надежности. Когда воздушное судно перемещается и находится в контакте с грунтом, оба пневматика вращаются в одном и том же направлении, и при вводе от пилота от штурвала, один пневматик будет вращаться быстрее другого пневматика, таким образом обеспечивая перепад входной мощности, подаваемой на двигатель/генераторы барабана колеса, тем самым обеспечивая управление передней опорой шасси в любом требуемом направлении при перемещении. Предшествующие способы, используемые в передней опоре шасси воздушного судна, производят неравномерный износ пневматиков передней опоры шасси при приземлении, создавая дисбаланс в пневматиках передней опоры шасси. Этот дисбаланс пневматиков передней опоры шасси может привести к вибрациям на колесах передней опоры шасси.
При использовании способа уменьшения износа пневматиков характеристики системы управления передней опоры шасси повышаются благодаря уменьшенной вибрации, обусловленной неравномерным износом пневматиков передней опоры шасси при приземлении, таким образом обеспечивая повышение устойчивости по сравнению со способами, используемыми в настоящее время.
Кроме того, передняя опора шасси, которая часто используется, чтобы помочь в управлении, может иметь большую возможность управления, когда она форсируется строго относительно посадочной полосы, особенно непосредственно после касания земли, так что система может включать в себя стабилизатор или интерцептор, или эквивалентный элемент, выполненный с возможностью направления воздуха вверх для повышения форсирования передней опоры шасси и передней части воздушного судна к посадочной полосе.
В другом аспекте изобретение обеспечивает улучшенное торможение ABS (Антиблокировочной Тормозной Системы). Значительное преимущество системы электромагнитного торможения заключается в том, чем сигнал обратной связи имеет скорость в 1000 раз быстрее, чем скорость в гидравлической системе, тем самым, обеспечивая увеличение эффективности торможения ABS и повышая уровень надежности, а также способствуя повышению уровня безотказности, поскольку электромагнитные устройства по существу более надежны, чем гидравлические устройства. Система электромагнитного торможения также по существу является антиблокировочной.
Имеется несколько способов создания антиблокировочной тормозной системы (ABS), и любая стандартная ABS или улучшенная ABS может быть использована в настоящем изобретении для вырабатывания требуемого торможения воздушного судна. Будет описано одно такое возможное средство, которое реализовывает использование нечеткой логики в качестве возможного устройства управления.
В последние годы методы управления нечеткой логики применялись ко многим системам. В настоящее время рассматриваются многие системы электронного управления в антиблокировочных тормозных системах (ABS). Эти управляемые с помощью электроники системы реализуют превосходные характеристики с помощью управления, основанного на нечеткой логике, а не на традиционных алгоритмах управления.
ABS реализована так, что она обеспечивает оптимальное управление и минимальные расстояния торможения при резком или аварийном торможении. Количество воздушных судов, оборудованных ABS, за эти годы непрерывно увеличивается, и теперь ABS вносит существенный вклад в надежность воздушного судна. Способы управления, используемые ABS, являются ответственными за улучшенные характеристики системы, а улучшенные возможности ABS являются целью изготовителей воздушных судов.
Электронные блоки управления (ЭБУ), датчики скорости колес и тормозные модуляторы представляют собой основные компоненты модуля ABS. Датчики скорости колес передают импульс в ЭБУ с частотой, пропорциональной скорости колес. Тогда ЭБУ обрабатывает эту информацию и регулирует тормоза соответствующим образом. ЭБУ и алгоритм управления частично отвечают за то, насколько хорошо система ABS выполняет работу, которую может реализовывать алгоритм управления нечеткой логики для использования в системе ABS.
Поскольку системы ABS являются нелинейными и динамическими по своей природе, они являются главными кандидатами для управления нечеткой логики. Для большинства поверхностей взлетно-посадочных полос, когда тормозное усилие применяется к системе колес воздушного судна, продольная зависимость силы трения между воздушным судном и поверхностью взлетно-посадочной полосы быстро увеличивается. Скольжение колес при этих условиях, как рассматривается, в значительной степени является разностью между скоростью транспортного средства и снижением скорости колес при приложении тормозного усилия. Тормоза работают, поскольку сила трения действует против скольжения. Чем больше скольжение, дающее достаточную силу трения, тем большее тормозное усилие воздействует на количество движения воздушных судов. К сожалению, скольжение может и будет работать против самого себя в течение прерванного взлета или на влажных или обледеневших поверхностях, где изменяется коэффициент поверхностного трения. Если тормозное усилие продолжает применяться за пределами полезного коэффициента трения поверхности взлетно-посадочной полосы, тормоз эффективно начинает функционировать в нефрикционной среде. Увеличение тормозного усилия в среде с уменьшенной силой трения часто приводит к полной блокировке колес. Было доказано как математически, так и эмпирически, что скользящее колесо производит меньшую величину трения, чем трение качения движущегося колеса.
Алгоритмы управления ABS должны учитывать нелинейность в тормозном моменте, обусловленную колебанием температуры и динамикой взаимодействий полей магнитных потоков. Также, следует учитывать внешние возмущения, такие как изменения коэффициента трения и поверхности взлетно-посадочной полосы, не говоря уже о влияниях износа пневматиков и старения компонентов систем. Эти оказывающие влияние факторы увеличивают сложность системы, в свою очередь воздействуя на математические модели, используемые для описания систем. Поскольку модель обращается ко все более сложным уравнениям, требуемым для управления, ABS также становится все более сложной. Из-за высоко динамической природы ABS используются многие допущения и начальные условия, чтобы сделать управление достижимым. Как только управление достигнуто, система реализуется на демонстрационной схеме макета и проверяется. Затем система модифицируется для достижения требуемого состояния управления, как определено испытательным макетом.
Благодаря характеру нечеткой логики, оказывающие влияние динамические факторы объясняются в описании ABS, основанном на системе правил. Этот тип "интеллектуального" управления обеспечивает более быструю разработку системного кода. Недавняя статья, озаглавленная “Fuzzy Logic Anti-Lock Brake System for a Limited Range Coefficient of Friction Surface” (антиблокировочная тормозная система нечеткой логики для поверхности с коэффициентом трения ограниченного диапазона), 1993 IEEE, адресована к некоторым из проблем, связанных с начальным развитием нечеткой ABS, с точки зрения изготовителя системы.
На Фиг.3 показана блок-схема, иллюстрирующая способ и устройство для управления ABS нечеткой логики в соответствии с настоящим изобретением. На Фиг.3 представлены вводы в ABS нечеткой логики, которые состоят из следующего:
1. Тормоз: этот блок представляет отклонение/установление тормозной педали. Эту информацию получают в цифровом или аналоговом формате, и она также указывает положение стояночного тормоза.
2. Режим приземления: он указывает, находится ли воздушное судно в режиме приземления, и также может программироваться в определенных данных взлетно-посадочной полосы, как ввод данных в систему.
3. Взлет: этот ввод регистрирует, подготовлено ли воздушное судно к взлету и работает ли двигатель.
4. Обратная связь: этот блок представляет набор входных данных относительно состояния системы ABS, таких как температура, уровни электрического тока, генерируемого и/или подаваемого на двигатель/генераторы барабана колеса, среди прочих.
5. Скорость колес: в обычном применении это представляет набор из четырех входных сигналов от каждого двигателя/генератора барабана колеса внутри каждого узла основной опоры шасси, которые передают информацию относительно скорости каждого колеса. Эта информация используется для получения всей необходимой информации для алгоритма управления.
6. Ввод данных и умножение на переменный весовой коэффициент обеспечивают объединение и оценку различных входных данных относительно проверки достоверности и надлежащего умножения на весовой коэффициент прежде, чем начинать их отсылку в алгоритмы управления ABS, находящиеся внутри интерфейсной машины основной программы.
7. Интерфейсную машину основной программы можно корректировать, когда такие уточнения делаются доступными для обработки входных данных для использования электронным блоком управления, который выводит на индикаторы для пилота данные, такие как возможный сигнал ошибки, и регулятор модуляции длительности импульса, который управляет мощностью, подаваемой на двигатель/генераторы барабана колеса тормозной системы.
Ускорение и скольжение для каждого колеса могут быть рассчитаны посредством объединения сигналов от каждого колеса. Эти сигналы затем обрабатываются в системе ABS нечеткой логики, чтобы достигнуть требуемого управления, и эта архитектура является такой, что пользуется преимуществом улучшенной синхронизации математического выполнения, когда такие уточнения делаются доступными.
Когда активизировано динамическое торможение, заключающееся в использовании двигателя/генератора барабана колеса в качестве генератора и подачи выходной мощности на группу резисторов, оно может быть установлено так, что тормозная система освобождает систему автоматического торможения на двигателе/генераторах барабана колеса, поскольку обе тормозные системы могут привести к слишком большому сопротивлению и заставить колеса скользить, таким образом производя плоские области на пневматиках колес. Другой вариант может заключаться в смешанном торможении. Смешанное торможение используется для выполнения еще более эффективного торможения. Создаваемое электронными схемами обратной связи ABS, смешанное торможение будет использовать некоторые системы автоматического торможения, хотя как в более низком диапазоне динамики, так и при больше высокой амперной нагрузке динамики, используя автоматическое торможение в меньшей степени, если оно используется. В полной мере динамика автоматического торможения может быть, например, полностью отключена. Смешанное торможение связано со скольжением колес и другими схемами управления торможением, например со скоростью изменения ускорения и скоростью на двигателе/генераторе барабана колеса.
Хотя были описаны примерные варианты осуществления данного изобретения, они никоим образом не ограничивают объем данного изобретения. Специалисты в данной области техники без труда оценят, что возможны любые модификации, и они должны быть включены в объем данного изобретения, как определено в последующей формуле изобретения. В формуле изобретения, где используются средство плюс функциональная часть, они предназначены для того, чтобы охватить конструктивные концепции, описанные в данном описании, в качестве выполнения изложенной функции, причем не только конструктивных эквивалентов, но также и эквивалентных конструкций.
Способ согласно изобретению, как описано выше в контексте предпочтительных вариантов осуществления, не следует принимать в качестве ограниченного всеми его предусмотренными деталями, поскольку могут быть выполнены его модификации и разновидности, не выходя при этом за рамки идеи и объема изобретения. Например, принципы изобретения в их более широких аспектах можно применять к другим двигательным и/или тормозным системам для электрических транспортных средств, таких как поезда, автобусы, грузовые автомобили, легковые автомобили и катера, или к другим устройствам с электроприводом, которые требуют торможения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИВОДА КОЛЕС ШАССИ САМОЛЕТА И ШАССИ САМОЛЕТА С ПРИВОДОМ КОЛЕС | 2011 |
|
RU2495792C2 |
| КОЛЕСО ШАССИ САМОЛЕТА С ПЛАНЕТАРНЫМ ДЕМПФИРУЮЩИМ ПРИВОДОМ | 2023 |
|
RU2801643C1 |
| СПОСОБ РАСКРУТКИ-ТОРМОЖЕНИЯ КОЛЕС ШАССИ | 2015 |
|
RU2581996C1 |
| СПОСОБ СОКРАЩЕНИЯ ДЛИНЫ ПРОБЕГА ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2469912C1 |
| Устройство измерения коэффициента сцепления колес с аэродромным покрытием | 2015 |
|
RU2612074C1 |
| Аэродромная установка рекуперации энергии самолета при посадке для разгона самолета на взлете | 2018 |
|
RU2668768C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНЫХ И ДОРОЖНЫХ ПОКРЫТИЙ | 2008 |
|
RU2369856C1 |
| РАЗГОННОЕ УСТРОЙСТВО ДЛЯ ВЗЛЕТА КОРАБЕЛЬНЫХ САМОЛЕТОВ | 2019 |
|
RU2712407C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2626581C1 |
Изобретение относится к узлу посадочного устройства воздушного судна. Узел по первому и второму варианту исполнения содержит переднюю опору шасси и основную опору шасси. Передняя опора шасси или основная опора шасси содержит невращающийся основной участок, колесо, статор, ротор, процессор, электрическое устройство. Статор и ротор выполнены с возможностью генерирования осевого магнитного потока. Процессор связан со статором и ротором и выполнен с возможностью подсоединения наборов статоров-роторов к электрическому устройству и отсоединения их от электрического устройства. Электрическое устройство содержит устройство накопления и хранения электрической энергии и/или устройство рассеяния электрической энергии. Узел по второму варианту включает ротор, содержащий диск. Диск ротора выполнен с возможностью перемещения параллельно оси вращения. Постоянный магнит диска ротора применяет усилие зажима к соответствующему диску статора для обеспечения функции стояночного тормоза. В узле по третьему варианту статор и ротор выполнены таким образом, что взаимодействие их осевых магнитных потоков вызывает преобразование всей энергии вращения колеса в электрическую энергию, а затем в тепловую энергию посредством образования вихревых токов в статоре и/или роторе. Электродвигатель/генератор содержит ротор и статор. Элемент ротора соединен с колесом посадочного устройства для вращения с колесом. Элемент статора соединен с осью или с трубчатым валом для опоры без вращения. Способ заключается в прикладывании электрического тока к статору, генерировании осевого магнитного потока и осуществлении моторизированного торможения колеса воздушного судна. Технический результат заключается в повышении устойчивости воздушного судна. 5 н. и 57 з.п. ф-лы, 3 ил.
1. Узел посадочного устройства воздушного судна для воздушного судна, содержащий переднюю опору шасси и основную опору шасси, причем передняя опора шасси или основная опора шасси содержит невращающийся основной участок, выполненный с возможностью соединения с каркасом воздушного судна, колесо, связанное с основным участком и вращающееся относительно него вокруг оси вращения, по меньшей мере, один статор, подсоединенный к основному участку, по меньшей мере, один ротор, связанный с колесом и выполненный с возможностью вращения относительно упомянутого статора, при этом каждые статор и ротор выполнены с возможностью генерирования осевого магнитного потока, и указанные статор и ротор выполнены таким образом, что взаимодействие их магнитных потоков вызывает преобразование электрической энергии в энергию вращающего момента колеса и/или преобразование энергии вращающего момента колеса в электрическую энергию до величины, подходящей для использования при уменьшении скорости вращения колеса, процессор, связанный со статором и ротором, и электрическое устройство, содержащее устройство накопления и хранения электрической энергии и/или устройство рассеяния электрической энергии, причем процессор выполнен с возможностью подсоединения и отсоединения наборов статоров-роторов к электрическому устройству и от электрического устройства.
2. Узел по п.1, дополнительно содержащий тормоза фрикционного типа, подсоединенные к основному участку и предназначенные для торможения колеса относительно основного участка в смешанной тормозной системе, в которой электромагнитное торможение сочетается со стандартными дисковыми тормозами фрикционного типа.
3. Узел по п.1, в котором статор и ротор выполнены таким образом, что взаимодействие их осевых магнитных потоков вызывает преобразование электрической энергии в энергию вращающего момента колеса и преобразование энергии вращающего момента колеса в электрическую энергию.
4. Узел по п.1, в котором статор и ротор содержат электропроводящий провод, выполненный таким образом, что взаимодействие их осевых магнитных потоков вызывает преобразование электрической энергии в энергию вращающего момента колеса и преобразование энергии вращающего момента колеса в электрическую энергию.
5. Узел по п.4, в котором электропроводящий провод представляет собой жаростойкий сверхпроводящий провод.
6. Узел по п.1, в котором статор содержит постоянные магниты высокой плотности энергии, а ротор содержит электропроводящий провод внутри углеродного материала, причем взаимодействие их осевых магнитных потоков вызывает преобразование электрической энергии в энергию вращающего момента колеса и преобразование энергии вращающего момента колеса в электрическую энергию.
7. Узел по п.6, в котором электропроводящий провод представляет собой жаростойкий сверхпроводящий провод.
8. Узел по п.1, в котором статор и ротор выполнены таким образом, что взаимодействие их осевых магнитных потоков вызывает преобразование, по существу, всей энергии вращения колеса в электрическую энергию, а затем в тепловую энергию посредством образования вихревых токов в статоре и/или роторе.
9. Узел по п.1, в котором ротор содержит постоянные магниты высокой плотности энергии внутри углеродного материала, а статор содержит сталь, так что магнитные потоки постоянных магнитов вызывают вихревые токи, которые производятся внутри статора, вызывая образование внутри колеса энергии магнитного тормозного момента для рассеивания энергии вращения колеса.
10. Узел по п.9, в котором ротор содержит электропроводящий провод, а статор содержит сплошной электропроводящий материал для генерирования вихревых токов, когда к проводу подводится энергия.
11. Узел по п.9, в котором статор содержит электропроводящий провод, а ротор содержит сплошной электропроводящий материал для генерирования вихревых токов, когда к проводу подводится энергия.
12. Узел по п.1, в котором посадочное устройство воздушного судна содержит два колеса, подсоединенных к основному участку и независимо вращающихся относительно него вокруг оси, причем каждое из двух колес связано с участком статора и участком ротора.
13. Узел по п.1, в котором статор содержит электропроводящие провода и выполнен с возможностью генерирования первого магнитного потока, по существу, параллельного оси, когда по проводам проходит ток, при этом ротор содержит постоянный магнит, который генерирует второй магнитный поток, по существу, параллельный оси, причем посадочное устройство выполнено с возможностью вращения колеса, когда по проводам проходит ток, посредством взаимодействия магнитных моментов первого и второго магнитных потоков.
14. Узел по п.1, в котором статор содержит электропроводящие провода и выполнен с возможностью генерирования первого магнитного потока, по существу, параллельного оси, когда по проводам проходит ток, при этом ротор содержит постоянный магнит, который генерирует второй магнитный поток, по существу, параллельный оси, причем посадочное устройство выполнено с возможностью вращения колеса, когда по проводам проходит ток, посредством взаимодействия магнитных моментов первого и второго магнитных потоков.
15. Узел по п.1, в котором ротор содержит электропроводящие провода и выполнен с возможностью генерирования первого магнитного потока, по существу, параллельного оси, когда по проводам проходит ток, при этом статор содержит постоянный магнит, который генерирует второй магнитный поток, по существу, параллельный оси вращения, причем посадочное устройство выполнено с возможностью вращения колеса, когда по проводам проходит ток, посредством взаимодействия магнитных моментов первого и второго магнитных потоков.
16. Узел по п.1, в котором ротор содержит электропроводящие провода и выполнен с возможностью генерирования первого магнитного потока, по существу, параллельного оси, когда по проводам проходит ток, при этом ротор содержит постоянный магнит, который генерирует второй магнитный поток, по существу, параллельный оси, причем посадочное устройство выполнено с возможностью вращения колеса, когда по проводам проходит ток, посредством взаимодействия магнитных моментов первого и второго магнитных потоков.
17. Узел по п.1, в котором ротор и статор содержат множество статоров и множество роторов, выполненных в виде множества наборов статоров-роторов, каждый из которых содержит, по меньшей мере, один статор и, по меньшей мере, один ротор.
18. Узел по п.17, в котором в каждом из наборов статоров-роторов, по меньшей мере, один из, по меньшей мере, одного статора и, по меньшей мере, одного ротора содержит электропроводящие провода для генерирования магнитного потока, по существу, параллельного оси, когда по проводам проходит ток, причем каждый из наборов статоров-роторов действует независимо, как двигатель и/или генератор, в зависимости от напряжения, приложенного к проводам.
19. Узел по п.1, в котором электрическое устройство содержит аккумуляторную батарею.
20. Узел по п.1, в котором электрическое устройство содержит конденсатор.
21. Узел по п.1, в котором электрическое устройство содержит конденсатор переменной емкости.
22. Узел по п.1, в котором электрическое устройство содержит резистор для рассеивания электрической энергии в тепловую энергию в месте, в котором такое рассеивание тепла надежно управляется.
23. Узел по п.1, в котором электрическое устройство содержит переменный резистор и/или группы резисторов.
24. Узел по п.1, в котором при посадке воздушного судна процессор вызывает вращение колеса с тангенциальной скоростью, по существу, соответствующей линейной скорости воздушного судна.
25. Узел по п.24, в котором электрическое устройство содержит устройство накопления и хранения электрической энергии, при этом процессор выполнен с возможностью, после касания земли воздушным судном, подключения, по меньшей мере, одного из наборов статоров-роторов к устройству накопления и хранения электрической энергии с полярностью, которая противодействует вращению колеса, для осуществления моторизованного торможения воздушного судна.
26. Узел по п.24, в котором процессор вызывает вращение колеса с тангенциальной скоростью, составляющей от приблизительно 100 до приблизительно 180 миль в час.
27. Узел по п.1, в котором при посадке воздушного судна процессор вызывает вращение колеса для гироскопического стабилизирования воздушного судна.
28. Узел по п.1, в котором процессор выполнен с возможностью подключения, по меньшей мере, одного из наборов статоров-роторов к электрическому устройству при посадке воздушного судна, тем самым преобразуя энергию вращения колеса в электрическую энергию, которая передается в электрическое устройство.
29. Узел по п.28, в котором процессор содержит антиблокировочную тормозную систему.
30. Узел по п.29, в котором антиблокировочная тормозная система содержит программное обеспечение, использующее нечеткую логику.
31. Узел по п.1, в котором процессор выполнен с возможностью подсоединения первого из наборов статоров-роторов ко второму из наборов статоров-роторов для приложения электрической энергии, генерируемой первым из наборов статоров-роторов, ко второму из наборов статоров-роторов, тем самым прикладывая к воздушному судну моторизованное торможение.
32. Узел по п.1, в котором электрическое устройство содержит устройство накопления и хранения электрической энергии, а процессор выполнен с возможностью подключения, по меньшей мере, одного из наборов статоров-роторов к устройству накопления и хранения электрической энергии при взлете воздушного судна для преобразования таким образом электрической энергии, хранящейся в устройстве накопления и хранения электрической энергии, в энергию вращения колеса, и подключения, по меньшей мере, одного из наборов статоров-роторов к устройству накопления и хранения электрической энергии при посадке воздушного судна для преобразования таким образом энергии вращения колеса в электрическую энергию устройства накопления и хранения электрической энергии.
33. Узел по п.1, в котором электрическое устройство является внешним относительно воздушного судна и выполнено с возможностью соединения с взлетно-посадочной полосой для воздушного судна, причем воздушное судно выполнено с возможностью простого отсоединения от электрического устройства.
34. Узел по п.33, в котором электрическое устройство выполнено с возможностью электрического подсоединения к наборам роторов-статоров через прямой электрический контакт.
35. Узел по п.33, в котором электрическое устройство выполнено с возможностью электрического подсоединения к наборам роторов-статоров без прямого электрического контакта посредством электрической индукции для передачи электрической энергии.
36. Узел по п.33, в котором процессор является внешним относительно воздушного судна и связан с электрическим устройством.
37. Узел по п.33, дополнительно содержащий внешнее устройство управления, которое беспроводным образом связано с процессором для обеспечения возможности направления и выполнения маневров воздушного судна диспетчером службы управления воздушным движением.
38. Узел по п.1, в котором процессор выполнен с возможностью последовательного подключения наборов статоров-роторов друг к другу.
39. Узел по п.1, в котором процессор выполнен с возможностью параллельного подключения наборов статоров-роторов друг другу.
40. Узел по п.1, в котором электрическое устройство содержит устройство накопления и хранения электрической энергии, причем процессор выполнен с возможностью переменного регулирования напряжения, прикладываемого устройством накопления и хранения электрической энергии, по меньшей мере, к одному из наборов статоров-роторов.
41. Узел по п.1, дополнительно содержащий устройство ввода весового коэффициента, связанное с процессором, причем процессор выполнен с возможностью подсоединения и отсоединения наборов статоров-роторов друг к другу и друг от друга как к электрическому устройству, так и от него, основываясь, по меньшей мере, частично на информации о весовом коэффициенте воздушного судна, принимаемой через устройство ввода весового коэффициента.
42. Узел по п.41, в котором умножение на весовой коэффициент для процессора является уникальным для каждой взлетно-посадочной полосы аэропорта, с обеспечением регулирования для различных метеорологических условий и регулирования умножения на весовой коэффициент во времени при обучении системы.
43. Узел по п.41, в котором процессор включает в себя средство для приема оптимальной характеристики тормозного момента для конкретной взлетно-посадочной полосы с учетом метеорологических условий, посредством чего адаптируется к взлетно-посадочной полосе управление торможением.
44. Узел по п.1, содержащий два колеса, соединенных с невращающимся основным участком и независимо вращающихся относительно него вокруг оси вращения, при этом каждое из двух колес связано с частью из множества статоров и частью из множества роторов, причем узел дополнительно содержит устройство ввода пользователя, соединенное с процессором, при этом процессор вызывает вращение первого из двух колес в одном направлении, а второго из двух колес - в противоположном направлении, основываясь, по меньшей мере, частично на указании о выполнении разворота, принятом через устройство ввода пользователя.
45. Узел по п.1, содержащий два колеса, соединенных с невращающимся основным участком и независимо вращающиеся относительно него вокруг оси вращения, при этом каждое из двух колес связано с частью из множества статоров и частью из множества роторов, причем узел дополнительно содержит устройство ввода пользователя, соединенное с процессором, при этом процессор вызывает вращение первого из двух колес в одном направлении с первой скоростью и второго из двух колес в том же направлении со второй скоростью, отличающейся от первой скорости, основываясь, по меньшей мере, частично на указании о выполнении разворота, принятом через ввод пользователя.
46. Узел по п.1, в котором, по меньшей мере, один ротор содержит диск ротора, выполненный с возможностью перемещения параллельно оси вращения, причем постоянный магнит диска ротора применяет усилие зажима к соответствующему диску статора для обеспечения функции стояночного тормоза.
47. Узел по п.46, в котором физически контактирующие поверхности, по меньшей мере, одного диска ротора и соответствующего диска статора содержат углеродный материал, причем постоянный магнит диска ротора имеет выемку внутри углеродного материала.
48. Узел по п.46, в котором параллельное перемещение диска ротора осуществляется посредством перемещения электромагнитного поршня.
49. Узел по п.1, в котором, по меньшей мере, один ротор снабжается постоянным током таким образом, что постоянный магнит ротора прикладывает статическое невращательное усилие зажима к соответствующему статору для обеспечения функции стояночного тормоза.
50. Узел посадочного устройства воздушного судна для воздушного судна, содержащий переднюю опору шасси и основную опору шасси, причем передняя опора шасси или основная опора шасси содержит невращающийся основной участок, выполненный с возможностью соединения с каркасом воздушного судна, колесо, связанное с основным участком и вращающееся относительно него вокруг оси вращения, по меньшей мере, один статор, подсоединенный к основному участку, по меньшей мере, один ротор, связанный с колесом и выполненный с возможностью вращения относительно упомянутого статора, при этом каждые статор и ротор выполнены с возможностью генерирования осевого магнитного потока, причем указанные статор и ротор выполнены таким образом, что взаимодействие их осевых магнитных потоков вызывает преобразование электрической энергии в энергию вращающего момента колеса и/или преобразование энергии вращающего момента колеса в электрическую энергию до величины, подходящей для использования при уменьшении скорости вращения колеса, при этом статор и ротор выполнены таким образом, что взаимодействие их осевых магнитных потоков вызывает преобразование, по существу, всей энергии вращения колеса в электрическую энергию, а затем в тепловую энергию посредством образования вихревых токов в статоре и/или роторе.
51. Узел по п.50, в котором статор и ротор выполнены таким образом, что взаимодействие их осевых магнитных потоков вызывает преобразование электрической энергии в энергию вращающего момента колеса и преобразование энергии вращающего момента колеса в электрическую энергию.
52. Электродвигатель/генератор для колес посадочного устройства воздушного судна, содержащий, по меньшей мере, один ротор и, по меньшей мере, один статор, расположенные таким образом, что между ротором и статором имеется зазор, при этом элемент ротора функционально соединен с колесом посадочного устройства для вращения с колесом, а элемент статора функционально соединен с осью или с трубчатым валом для опоры без вращения, в результате чего колеса посадочного устройства являются приводимыми от электродвигателя, причем статор и ротор выполнены таким образом, что взаимодействие их осевых магнитных потоков вызывает преобразование, по существу, всей энергии вращения колеса в электрическую энергию, а затем в тепловую энергию посредством образования вихревых токов в статоре и/или роторе.
53. Электродвигатель/генератор по п.52, выполненный с возможностью функционирования в качестве электрогенератора для колес посадочного устройства воздушного судна для обеспечения тормозного усилия для колес посадочного устройства.
54. Электродвигатель/генератор по п.52, в котором ротор имеет конструкцию с постоянными магнитами с соответствующим полем собственного магнитного потока, при этом элемент статора содержит проводники тока, для приема электроэнергии для создания соответствующего поля магнитного потока, которое взаимодействует с полем магнитного потока ротора, таким образом обеспечивая приложение магнитного момента к ротору для того, чтобы электродвигатель воздействовал на колеса посадочного устройства.
55. Электродвигатель/генератор по п.54, представляющий собой систему электродвигателя с осевым потоком, содержащую бесщеточный электродвигатель/генератор с осевым потоком с соответствующим электронным контроллером, при этом магнитный момент обеспечивается за счет взаимодействий магнитных моментов между постоянными магнитами внутри диска ротора и электромагнитными полюсами статора, причем постоянные магниты чередуются северными и южными полюсами с потоком, выровненным по оси и выровненным в соответствии с обмоткой возбуждения или намоткой статора, при этом положение ротора относительно статора определяется с использованием, по меньшей мере, одного датчика на эффекте Холла, причем информация о положении диска ротора пересылается в соответствующий процессор электронного контроллера для соответствующего согласования управляющих сигналов, посылаемых к, по меньшей мере, одному оптическому вентилю и затем к многофазному бесщеточному коммуникационному приводному устройству управления, которое прикладывает электроэнергию от накопителя энергии и/или бортового источника питания к обмотке возбуждения статора внутри диска статора, так что создается магнитный момент посредством синхронизации электроэнергии, подаваемой к электромагнитным полюсам статора, за счет соответствующего согласования возбуждения катушки полюса статора, генерирующего непрерывный положительный момент для работы электродвигателя, причем электродвигатель приводится в прямом или обратном направлении в зависимости от входного сигнала от управляющего устройства пользователя для приведения и торможения, которое выдает информацию процессору электронного контроллера через оптические вентили, для инициализации входного сигнала от пользователя для работы электродвигателя в прямом или обратном направлении внутри электродвигателя колес согласно сигналу от пользователя.
56. Электродвигатель/генератор по п.54, представляющий собой систему генератора с осевым потоком, содержащую бесщеточный электродвигатель/генератор с осевым потоком с соответствующим электронным контроллером, при этом электроэнергия вырабатывается за счет перемещения постоянных магнитов относительно друг друга внутри диска ротора и обмотками возбуждения или намотками статора, причем постоянные магниты чередуются северными и южными полюсами с потоком, выровненным по оси и выровненным в соответствии с обмоткой возбуждения или намоткой статора, при этом осуществляется работа генератора, причем приложение электроэнергии обеспечивается обмоткой возбуждения статора для устройства управления регенеративным торможением и многофазным выпрямлением, и поскольку относительное перемещение происходит между секциями статора и ротора, многофазный электрический сигнал генерируется внутри обмоток статора, и этот электрический сигнал передается в устройство управления регенеративным торможением и многофазным выпрямлением, которое преобразует изменяющийся многофазный электрический сигнал в сигнал постоянного тока на основании управляющих сигналов, генерируемых процессором электронного контроллера, в зависимости от входных сигналов от управляющего устройства пользователя для приведения и торможения, и если управляющий сигнал процессора является таким, что требуется хранение электроэнергии и/или ее рассеивание, то сигнал постоянного тока пересылается от устройства управления регенеративным торможением и многофазным выпрямлением в устройство хранения электроэнергии и/или бортовое устройство электроснабжения для последующего использования и/или передачи на сопротивление для рассеивания электроэнергии для рассеивания выработанной электроэнергии.
57. Электродвигатель/генератор по п.56, в котором устройство управления регенеративным торможением и многофазным выпрямлением также обеспечивает многофазную электроэнергию для контроллера моторизированного торможения, который управляется управляющими сигналами процессора при получении команд на моторизированное торможение, при этом многофазные электрические сигналы прилагаются к обмоткам возбуждения статора другого диска статора внутри того же или другого ряда дисков статора для того, чтобы передать электроэнергию на обмотки возбуждения статора другого диска статора, в результате чего увеличивается эффект торможения посредством привода диска в направлении, противоположном направлению вращения ротора, за счет чего обеспечивается эффект моторизированного торможения.
58. Электродвигатель/генератор по п.52, представляющий собой систему электродвигателя, отличную от электродвигателя с осевым потоком.
59. Электродвигатель/генератор по п.52 или 53, который расположен внутри колеса посадочного устройства воздушного судна.
60. Электродвигатель/генератор по п.52 или 53, который расположен на оси или трубчатом валу посадочного устройства воздушного судна.
61. Узел посадочного устройства воздушного судна для воздушного судна, содержащий переднюю опору шасси и основную опору шасси, причем передняя опора шасси или основная опора шасси содержит невращающийся основной участок, выполненный с возможностью соединения с каркасом воздушного судна, колесо, связанное с основным участком и вращающееся относительно него вокруг оси вращения, по меньшей мере, один статор, подсоединенный к основному участку, по меньшей мере, один ротор, связанный с колесом и выполненный с возможностью вращения относительно упомянутого статора, при этом каждые статор и ротор выполнены с возможностью генерирования осевого магнитного потока, и указанные статор и ротор выполнены таким образом, что взаимодействие их магнитных потоков вызывает преобразование электрической энергии в энергию вращающего момента колеса и/или преобразование энергии вращающего момента колеса в электрическую энергию до величины, подходящей для использования при уменьшении скорости вращения колеса, процессор, связанный со статором и ротором, и электрическое устройство, содержащее устройство накопления и хранения электрической энергии и/или устройство рассеяния электрической энергии, причем процессор выполнен с возможностью подсоединения и отсоединения наборов статоров-роторов к электрическому устройству и от электрического устройства, при этом, по меньшей мере, один ротор содержит диск ротора, выполненный с возможностью перемещения параллельно оси вращения, причем постоянный магнит диска ротора применяет усилие зажима к соответствующему диску статора для обеспечения функции стояночного тормоза.
62. Способ остановки воздушного судна, имеющего узел посадочного устройства по п.1, при котором прикладывают электрический ток к статору, генерируют осевой магнитный поток и осуществляют моторизированное торможение колеса воздушного судна, при этом рекуперативное и моторизированное торможение и образование вихревых токов обеспечивают достаточное усилие для обеспечения полной остановки воздушного судна.
| US 4659040 А, 21.04.1987 | |||
| US 5721473 А, 24.02.1998 | |||
| US 3017145 А, 16.01.1962 | |||
| US 6318487 В2, 20.11.2001 | |||
| US 3292021 A, 12.13.1966 | |||
| US 5104063 A, 14.04.1992 | |||
| US 3671788 A, 20.06.1972 | |||
| US 4687158 A, 18.08.1987 | |||
| МНОГОДИСКОВЫЙ ТОРМОЗ | 1998 |
|
RU2143381C1 |
| ТОРЦЕВОЙ НАБОРНЫЙ ЭЛЕКТРОМОТОР | 2000 |
|
RU2213408C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОВЫМ ПОЛОЖЕНИЕМ САМОЛЕТА | 1992 |
|
RU2023630C1 |
| GB 1213862 A2, 25.11.1970 | |||
| US 2003159866 A1, 28.08.2003. | |||

