Фиг.1
СО
Изобретение относится к машиностроению и может быть использовано в передачах с регулируемым ходом перемещений.
Цель изобретения - повышение точности позиционирования за счет иного выполнения ведомого элемента.
На фиг. 1 изображен привод, общий вид; на фиг. 2 - вид А на фиг. 1.
Привод перемещений исполнительного органа содержит размещенный на раме 1 двигатель 2 линейного перемещения со щто- ками 3, выходящими на обе стороны двигателя 2. Штоки 3 соединены с концами гибкой связи 4, которая проходит через два блока 5, закрепленные на раме 1, и соединена с кареткой 6, установленной на направляющей 7, параллельной винту 8, который одновременно выполняет функцию направляющей. В каретке 6 жестко укреплена гайка (не показана) несамотормозящей винтовой пары, винт 8 которой установлен в опорах 9. На одном конце винта 8 закреплен ротор сельсина 10, представляющего собой датчик положения исполнительного органа, статор сельсина 10 установлен на раме 1, а его обмотки (не показаны) электрически связаны с двигателем 2 линейного перемещения.
Направляющая 7, винт 8 и каретка 6 представляют собой ведомый элемент. На каретке 6 закреплен кронщтейн 11, на кото- .рый устанавливается исполнительный орган, например измерительная головка (не показана). Перед началом работы расчетным путем определяют результирующее перемещение исполнительного органа (измерительной головки), необходимое для обеспечения в зоне работы точного заданного его положения. При этом учитывают измеряемые параметры самого изделия и параметры элементов привода (ход штоков 3 двигателя 2, диаметр блоков 5 гибкой связи 4), диаметр и угол наклона профиля элементов винтовой пары и т. п.).
Полученные результаты переводят в значения угла индикации сельсина 10 и закладывают в программу автоматической системы управления двигателем 2. При измерении параметров изделия при его обработке, например, на гидравлическом прессе двигатель 2 перемещает шток 3, гибкую связь 4, взаимодействующую с блоками 5, и каретку 6, подавая измерительную головку в зону формообразования обрабатываемых изделий.
При перемещении каретки 6 на определенную величину поворачивается ротор сельсина 10, фиксируя положение каретки 6 и установленной на ней измерительной головки.
При достижении кареткой б исходного положения сельсин 10 дает команду на отключение двигателя 2 линейного перемещения.
Формула изобретения
5
0
Привод перемещеиий исполнительного органа, содержащий двигатель линейного перемещения, кинематически связанные с ним несамотормозящую винтовую пару и ведомый элемент, связанный с исполнительным органом, отличающийся тем, что, с целью повышения точности позиционирования, ведомый элемент выполнен в виде направляющей, установленной параллельно винту, и каретки, гайка винтовой пары жестко установлена в каретке, кинематическая связь между двигателем линейного шгремещения и ведомым элементом выполнена в виде гибкой связи, а привод снабжен рамой, установленной на опорах винта, двумя блоками, закрепленными на ней и предназначенными 5 для взаимодействия с гибкой связью, и датчиком положения ведомого элемента, выполненным в виде сельсина, ротор которого жестко соединен с винтом, а статор - с рамой.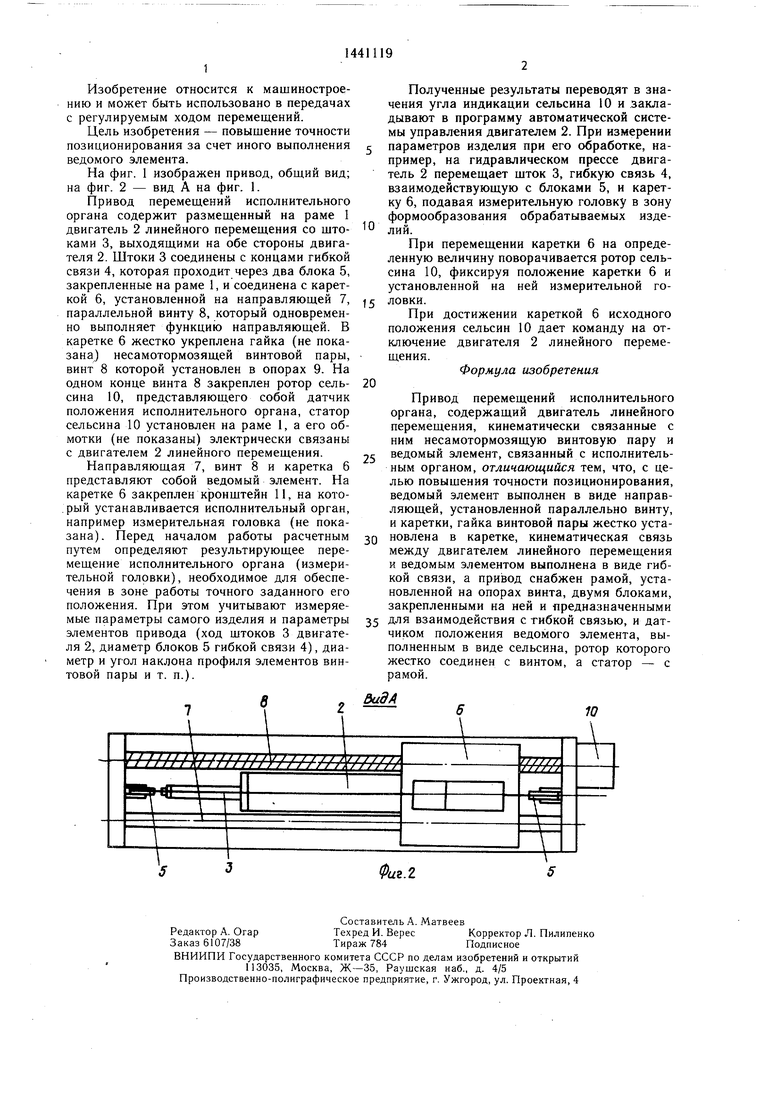
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для автоматической записи профиля забоя при драгировании | 1980 |
|
SU960381A1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОМЕХАНИЗМ В.И.СМИРНОВА | 1992 |
|
RU2102826C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2009 |
|
RU2427750C2 |
| Мобильное роботизированное шасси для надреза мульчирующей пленки над растением с последующей ее фиксацией | 2022 |
|
RU2785580C1 |
| Привод шаговых перемещений | 1982 |
|
SU1049709A1 |
| Линейный электропривод | 2019 |
|
RU2735979C1 |
| ПРИВОД ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2006 |
|
RU2339858C2 |
| Устройство для установки на печатные платы радиоэлементов, преимущественно поверхностного монтажа | 1988 |
|
SU1777256A1 |
| ПРОХОДЧЕСКО-ОЧИСТНОЙ КОМБАЙН | 2020 |
|
RU2753306C1 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
Изобретение относится к машиностроению и может быть использовано в передачах с регулируемым ходом перемещений. Цель изобретения - повышение точности позиционирования за счет иного выполнения ведомого элемента и снабжения датчиком положения ведомого элемента. Для достижения этой цели привод имеет несамотормозя- щую винтовую пару, винт 8 которой разме- ш,ен в опорах 9 и жестко связан с ротором сельсина 10, выполняющего функции датчика положения исполнительного органа - каретки 6 с кронштейном 11, на котором устанавливается измерительная головка. Гайка винтовой пары жестко закреплена в каретке 6, а статор сельсина 10 закреплен на раме 1 и имеет электрическую связь с двигателем 2 линейного перемещения каретки 6 через штоки 3 и гибкую связь 4. 2 ил.
Suff/1
Фиг.2
| Привод шаговых перемещений | 1982 |
|
SU1049709A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
