Изобретение относится к области радиолокации и может быть применено для дистанционного измерения координат точечного объекта, наблюдаемого внутри главного лепестка аппаратной функции неподвижного объектива.
В настоящее время наиболее распространено определение координат объекта при активной локации, в которой точность измерения координат в дальней зоне антенны ограничивается шириной главного лепестка ее диаграммы направленности.
Известен также способ, реализующийся несколькими радиолокационными станциями, разнесенными по пунктам, координаты которых определены. Этот способ позволяет определить координаты объекта с высокой точность, но имеет недостаток - сложность его реализации.
Наиболее близким аналогом является способ [1], в котором точность определения координат обеспечивается определенным алгоритмом сканирования просматриваемого сектора, что позволяет увеличить частоту получения информации о координатах объекта и равномерное ее обновление. Недостатки способа: механическое сканирование, точность определения координат ограничена шириной диаграммы направленности антенны.
Технический результат предложенного способа заключается в том, что измерения координат объекта производятся неподвижной приемно-передающей системой.
Указанный технический результат в способе определения координат объекта, наблюдаемого внутри главного лепестка аппаратной функции неподвижного объектива, достигается тем, что:
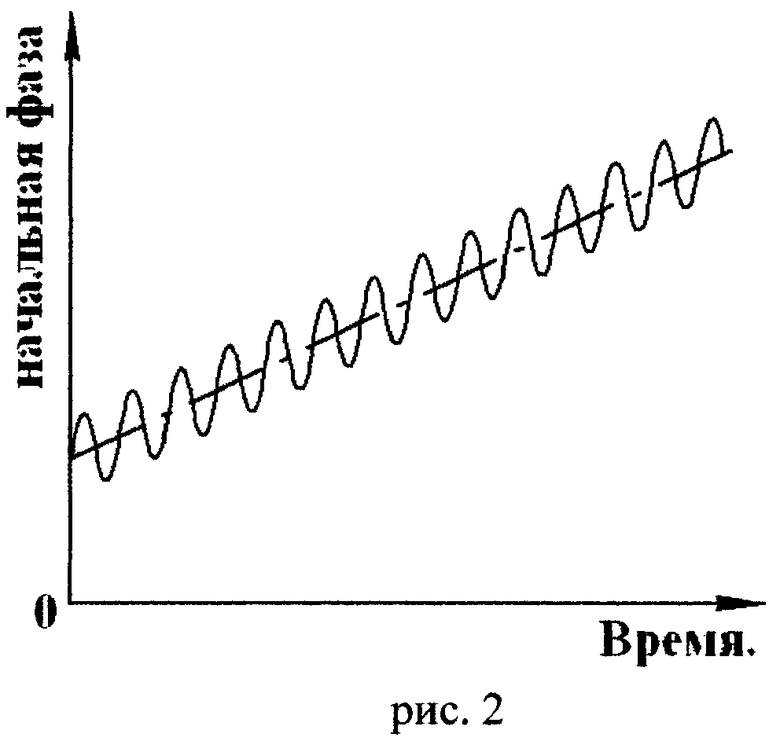
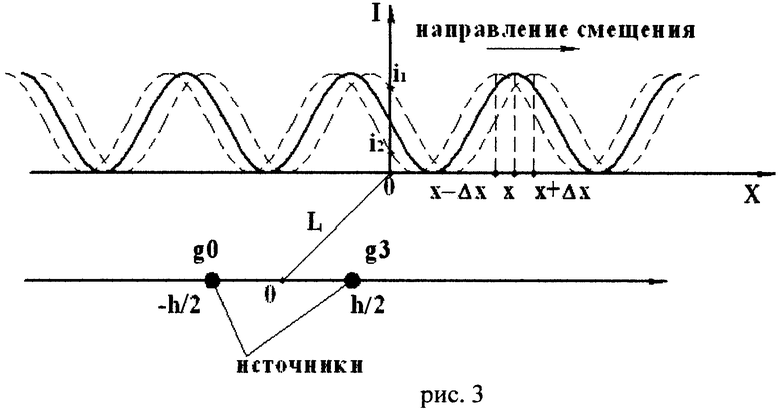
1. Источники электромагнитных колебаний g0, g1, g2, g3, g4 (см. рис.1) с управляемыми по определенным законам начальными фазами (см. рис.2), удаленные друг от друга на различные расстояния, питаются от одного генератора, включаются последовательно парами, возбуждают электромагнитные волны, создающие в области Q интерференционную картину (светлые и темные полосы (см. рис.1), ширина полос зависит от расстояния между источниками); рисунок 1 соответствует одной из пар источников g0, g3, g4, расположенных на оси X (например, g0, g3, где h - расстояние между источниками, L - расстояние от середины отрезка h до видимой объективом области Q, внутри которой находится точечный объект J); распределение интенсивности в области Q вдоль оси X при L>>h показано сплошной линией на рис.3, где пунктирные линии иллюстрируют смещение интерференционной картины, вызванное модуляцией фазы с частотой ω1, Δx - амплитуда колебаний, что дает возможность на частоте ω1 принять разностный сигнал Δ=i2-i1 (см. рис.3), максимумы разностного сигнала Δмакс будут наблюдаться в точках максимума модуля производной dI/dx, которым соответствуют фазовые сдвиги в ±90° (от положения максимума интерференционной картины); регистрация разностного сигнала и определение положения его максимумов позволяют существенно увеличить точность определения координаты точечного объекта.
Аналогично источники g0, g1, g2 создают картину в виде полос, перпендикулярных оси Y;
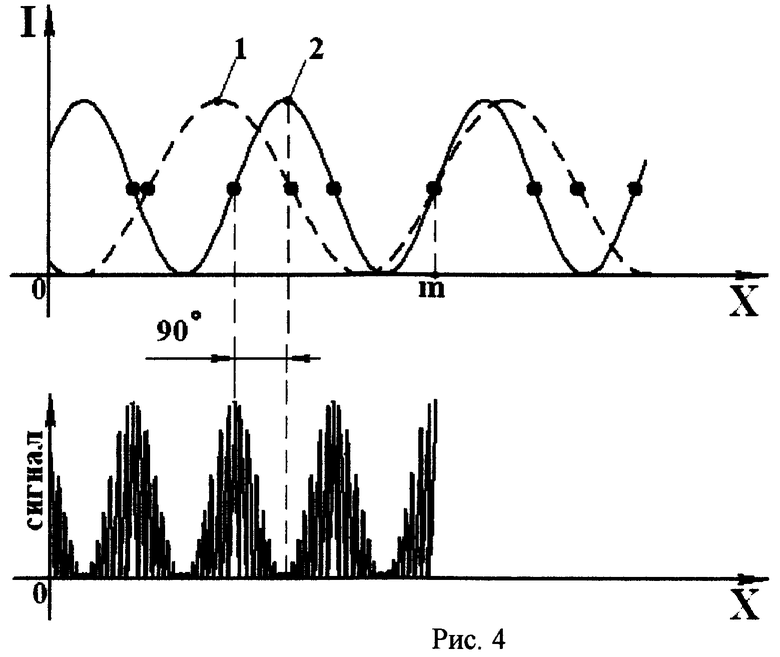
2. Излучение, отраженное точечным объектом J, принимается объективом (см. рис.1) и передается на вход приемного устройства, настроенного на частоту модуляции ω1. С приемного устройства электрический сигнал поступает на блок управления и регистрации, обеспечивающий изменением начальных фаз источников, смещение интерференционной картины в положение, где от объекта будет регистрироваться максимум сигнала. Значения начальных фаз источников, соответствующих максимуму сигнала, подаются на блок расчета координат, который вычисляет несколько возможных координат объекта, показанных точками на рис.4.
Аналогично вычисляются координаты объекта при включенных источниках g0, g4 (точки на сплошной линии 2). Координатой объекта будет точка m, в которой совпадают координаты двух точек, одна из которых принадлежит линии 1, другая линии 2.
Остальные точки не имеют общих координат в области Q, что обеспечивается разными расстояниями между источниками, создающими отличия в ширинах интерференционных структур.
Литература:
1. Патент на изобретение №2052834.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ПРЕДМЕТОВ, СКРЫТЫХ ПОД ОДЕЖДОЙ ЧЕЛОВЕКА, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2406099C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОПОРТРЕТА ОБЪЕКТА ОДНИМ ДЕТЕКТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2382382C2 |
| СПОСОБ ФОРМИРОВАНИЯ ПУЧКА НЕЙТРАЛЬНЫХ АТОМОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
SU1672865A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ГОЛОГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ РИСУНКА | 2012 |
|
RU2511035C1 |
| ОПРЕДЕЛИТЕЛЬ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 2003 |
|
RU2247321C1 |
| Способ исследования микрообъектов и ближнепольный оптический микроскоп для его реализации | 2016 |
|
RU2643677C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОПОРТРЕТА ОБЪЕКТА МЕТОДОМ ПАРАЛЛЕЛЬНОЙ ОБРАБОТКИ С ЧАСТОТНЫМ РАЗДЕЛЕНИЕМ | 2012 |
|
RU2504800C1 |
| СПОСОБ ОПТИЧЕСКОЙ ТОМОГРАФИИ ТРЕХМЕРНЫХ МИКРООБЪЕКТОВ И МИКРОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2145109C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ГОЛОГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ РИСУНКА | 2011 |
|
RU2486561C1 |
| ДИФРАКЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2554598C2 |
Способ определения координат объекта, наблюдаемого внутри главного лепестка аппаратной функции неподвижного объектива, заключается в облучении объекта электромагнитным излучением, приеме отраженного излучения, преобразовании его в электрический сигнал, проведении математической обработки сигнала с целью вычисления координат объекта. Питающиеся от одного генератора пять источников электромагнитных колебаний с управляемыми, по определенным законам начальными фазами разнесены друг от друга на различные расстояния, включаются последовательно парами и облучают объект. Отраженные объектом излучения принимаются неподвижным объективом, преобразуются в электрические сигналы; по изменению которых определяются координаты объекта. Технический результат - повышение точности определения координат объекта, находящегося внутри главного лепестка при неподвижных источниках и объективе. 4 ил.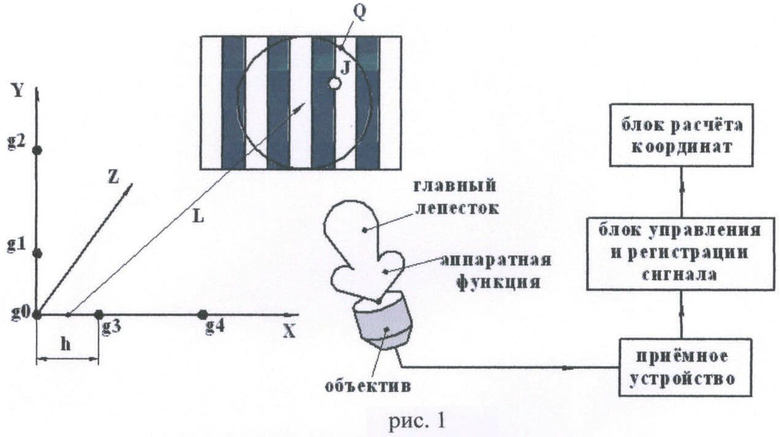
Способ определения координат объекта, наблюдаемого внутри главного лепестка аппаратной функции неподвижного объектива, заключающийся в облучении объекта электромагнитным излучением, приеме отраженного излучения, преобразовании его в электрический сигнал, проведении математической обработки сигнала с целью вычисления координат объекта, отличающийся тем, что питающиеся от одного генератора пять источников электромагнитных колебаний с управляемыми по определенным законам начальными фазами, разнесены друг от друга на различные расстояния, включаются последовательно парами и облучают объект; отраженные объектом излучения принимаются неподвижным объективом, преобразуются в электрические сигналы, по изменению которых определяются координаты объекта.
| RU 2052834 C1, 20.01.1996 | |||
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2003 |
|
RU2255352C2 |
| US 2009231181 A1, 17.09.2009 | |||
| US 4768034 A, 30.08.1988. | |||

