Изобретение относится к оптическому приборостроению, связано со стабилизацией изображения наблюдаемых объектов в оптических приборах, работающих на подвижном основании, и предназначено для создания наблюдательных систем типа бинокля.
Известны системы стабилизации, использующие как гироскоп, так и инерционный принцип. Из наиболее близких - патент РФ №2136030, заявитель ОАО «ЗОМЗ» [1], и патент РФ №2229149, заявители Фроимсон И.М., Макаров Е.Ю., Лихачев А.Б. [2] с использованием инерционного способа стабилизации и устройством управления панорамированием на основе магнитной системы.
Недостатком данных систем является неоптимальная эффективность успокоителя колебаний, нестабильность характеристик магнитной пружины и недостаточная идентичность характеристик стабилизации по осям подвеса (по вертикали и по горизонтали), вследствие использования одной магнитной системы и в качестве магнита магнитной пружины и в качестве магнитной системы успокоителя колебаний. Причина различий характеристик стабилизации по различным осям заключается в существенном различии моментов инерции подвижной системы по осям подвеса, с одной стороны, и изотропности эффективности магнитного успокоителя системы, с другой стороны. Такое соотношение параметров устройства приводит к существенному различию демпфирующих характеристик стабилизатора при колебаниях корпуса относительно различных осей и не позволяет достичь одинаковых значений коэффициента демпфирования колебаний по различным осям и для различных частот возмущающих колебаний. Решение проблемы за счет выравнивания моментов инерции подвижной системы приводит к значительному увеличению массы и габаритов прибора. Техническое решение по патенту РФ №2229149, улучшающее соотношение жесткости магнитной пружины по главным осям инерции, позволяет достичь близости резонансных частот системы стабилизации по обеим осям подвеса, но не позволяет достичь равенства коэффициента демпфирования для различных частот возмущающих колебаний корпуса и оптимального подавления колебательных процессов в системе по различным осям.
Технической задачей, решаемой изобретением, является создание простой системы стабилизации, имеющей небольшие габариты и массу и обеспечивающей идентичность характеристик стабилизатора для различных направлений колебания корпуса и для различных частот возмущающих воздействий.
Для решения задачи предлагается бинокулярная система со стабилизацией изображения, содержащая два объектива, два окуляра, карданов подвес, подвижную инерционную систему, состоящую из призменных оборачивающих блоков, симметрично расположенных относительно карданова подвеса посредством монолитной рамки, консоли с пластиной успокоителя, выполненной из немагнитного материала с малым удельным электрическим сопротивлением, балансировочного груза, закрепленного на консоли, магнитной пружины, связывающей подвижную систему с корпусом.
Устройство управления подвижной инерционной системой выполнено на основе магнитной пружины, содержащей постоянный магнит магнитной пружины, установленный на корпусе, и сердечник из магнитомягкого материала, установленный на подвижной системе, а также на основе успокоителя, содержащего, по крайней мере, один постоянный магнит, установленный на корпусе, и пластину успокоителя, установленную на консоли подвижной системы. Сущность изобретения заключается в том, что подвижная инерционная система, включающая в себя оборачивающие блоки, закрепленная на кольце карданова подвеса, имеющего две степени свободы, представляет собой развязанную с корпусом инерционную систему, управляемую посредством магнитной пружины и успокоителя, содержащего пластину успокоителя на консоли подвижной системы и магнитную систему успокоителя, закрепленную на корпусе. Устройство управления подвижной инерционной системой необходимо для обеспечения панорамирования корпусом в процессе наблюдения и успокоения колебаний подвижной системы в процессе и после возмущений, вызываемых колебаниями корпуса.
Для обеспечения требуемых частотных характеристик стабилизатора необходимо иметь возможность устанавливать необходимую жесткость магнитной пружины независимо от свойств успокоителя, а оптимальную эффективность успокоителя - независимо от свойств магнитной пружины. Достижение заданной цели обеспечивается выполнением магнитной пружины и успокоителя раздельными устройствами, установленными с разных сторон консоли подвижной системы. Регулировка жесткости магнитной пружины осуществляется изменением воздушного промежутка между сердечником и постоянным магнитом магнитной пружины за счет перемещения сердечника вдоль оси консоли. Коэффициент демпфирования инерционной системы на частотах выше резонансной частоты определяется [3] эффективностью успокоителя и моментом инерции подвижной системы:
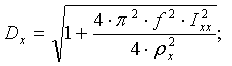
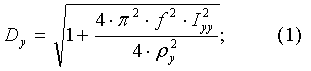
где Dx, Dy - коэффициенты демпфирования системы стабилизации относительно главных осей инерции подвижной системы,
Ixx, Iyy - моменты инерции подвижной системы относительно главных осей инерции подвижной системы,
ρx, ρy - коэффициенты эффективности успокоителя относительно этих же осей,
f - частота колебаний корпуса бинокулярной системы.
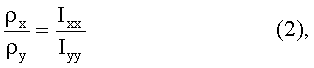
Моменты инерции подвижной части устройства относительно главных осей инерции подвижной системы различаются весьма существенно, так как одна из главных осей проходит через оборачивающие блоки, а относительно другой главной оси оборачивающие блоки вынесены на расстояние, примерно равное половине расстояния между осями объективов. Для обеспечения идентичности коэффициентов демпфирования системы стабилизации по осям, когда подвижная инерционная система имеет существенно различные моменты инерции, эффективность успокоителя должна также различаться в соотношении
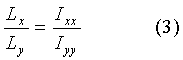
Достижение заданной цели обеспечивается выполнением магнитной системы успокоителя таким образом, что его магнитный элемент, представляющий собой постоянный магнит, установлен полюсом в направлении пластины успокоителя, а контуры проекции магнитного элемента на пластину успокоителя ориентированы вдоль главных осей инерции подвижной системы. При этом размеры его проекции на поверхность пластины успокоителя в направлениях проекций главных осей инерции подвижной системы на поверхность пластины успокоителя соотносятся как
 ,
,
где Ixx, Iyy - моменты инерции подвижной системы относительно главных осей инерции подвижной системы, Lx, Ly - размеры проекции магнитного элемента успокоителя на поверхность пластины успокоителя в направлениях проекций этих же главных осей инерции подвижной системы, соответственно.
Такая геометрически неизотропная магнитная система успокоителя позволяет получить существенно различную по осям эффективность успокоителя и за счет этого скомпенсировать влияние неизотропности моментов инерции подвижной системы на характеристики системы, достигая условия идентичности коэффициента демпфирования устройства при колебаниях относительно различных осей:  ; где Ixx, Iyy - моменты инерции подвижной системы относительно главных осей инерции подвижной системы, ρx, ρy - коэффициенты эффективности успокоителя относительно этих же осей.
; где Ixx, Iyy - моменты инерции подвижной системы относительно главных осей инерции подвижной системы, ρx, ρy - коэффициенты эффективности успокоителя относительно этих же осей.
Для усиления эффективности успокоителя колебаний магнитный элемент успокоителя соединен с замыкателем из магнитомягкого материала, охватывающим пластину успокоителя. Замыкатели концентрируют магнитное поле рассеяния магнитного элемента в пластине успокоителя, что позволяет получить необходимые диссипативные свойства устройства управления подвижной системой. Расположение магнитного элемента полюсом в направлении пластины успокоителя существенно повышает общую эффективность успокоителя и позволяет уменьшить размеры и массу магнитного элемента.
Для регулирования окуляров по базе глаз наблюдателя в воздушном промежутке перед каждым окуляром установлена ромб - призма с возможностью совместного вращения вместе с окуляром вокруг оси, параллельной продольной оси прибора.
На фиг.1 можно видеть бинокулярную систему со стабилизацией изображения, состоящую из двух объективов (1), двух подвижных ромб-призм (2), двух окуляров (3), двухстепенного карданова подвеса (4), подвижной инерционной системы, установленной на кардановом подвесе (4), состоящей из двух блоков оборачивающей системы (5) (например, призм Пехана), монолитной рамки (6), консоли (7), балансировочного груза (8), пластины успокоителя (9), выполненной из материала, имеющего малое электрическое сопротивление (например, меди), магнитной системы успокоителя, состоящей из, по крайней мере, одного магнитного элемента (10) и магнитного замыкателя (11), сердечника (12) магнитной пружины, выполненной из магнитомягкого материала (например, малоуглеродистой стали), магнита магнитной пружины (13).
Устройство управления подвижной инерционной системой сочетает в себе пружину и успокоитель колебаний на вихревых токах. Основой успокоителя колебаний является закрепленная на корпусе бинокулярной системы магнитная система, состоящая из магнитного элемента (10) в виде постоянного магнита, имеющего форму, при которой контуры проекции магнитного элемента на пластину успокоителя ориентированы вдоль проекций главных осей инерции подвижной системы на пластину успокоителя и размеры, соответствующие выражению (3), например, в виде прямого параллелепипеда. На свободном конце консоли укреплена пластина успокоителя (9), взаимодействующая с магнитным полем магнитного элемента успокоителя.
Прибор работает следующим образом. При колебаниях корпуса прибора в процессе наблюдения инерционная подвижная система сохраняет свое положение в пространстве за счет момента инерции подвижной системы и, соответственно, сохраняется положение визирной оси прибора, определяемое положением оборачивающих блоков (5), установленных на подвижной системе. При панорамировании корпусом прибора магнитная пружина, состоящая из сердечника (12) и магнита (13), возвращает подвижную инерционную систему в центральное относительно корпуса положение. Возникающие колебания гасятся успокоителем колебаний на основе магнитного элемента (10), создающего вихревые токи в пластине успокоителя (9).
Благодаря геометрической форме магнитного элемента успокоителя, при которой контуры проекции магнитного элемента на пластину успокоителя ориентированы вдоль проекций главных осей инерции подвижной системы на пластину успокоителя, и размерам магнитного элемента, определяемым выражением (3), эффективность успокоителя имеет искомую неизотропную структуру, позволяющую достичь
необходимого соотношения  , где Ixx, Iyy - моменты инерции подвижной системы относительно главных осей инерции подвижной системы, ρx, ρy - коэффициенты эффективности успокоителя относительно этих же осей.
, где Ixx, Iyy - моменты инерции подвижной системы относительно главных осей инерции подвижной системы, ρx, ρy - коэффициенты эффективности успокоителя относительно этих же осей.
Выполнение соотношения  означает идентичность коэффициентов демпфирования системы стабилизации при колебаниях относительно различных осей на различных частотах колебаний корпуса бинокля.
означает идентичность коэффициентов демпфирования системы стабилизации при колебаниях относительно различных осей на различных частотах колебаний корпуса бинокля.
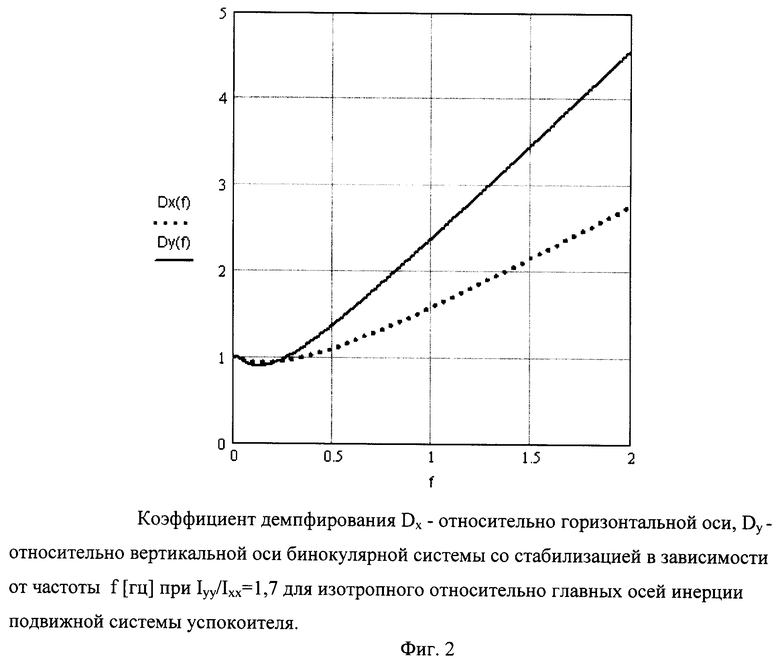
На фиг.2 представлена частотная зависимость коэффициента демпфирования колебаний по различным осям при изотропном успокоителе. Из-за различий моментов инерции подвижной системы по осям (Ixx, Iyy=1,7) коэффициенты демпфирования по осям существенно различаются, что не позволяет достичь оптимальных значений коэффициента демпфирования по обеим осям одновременно.
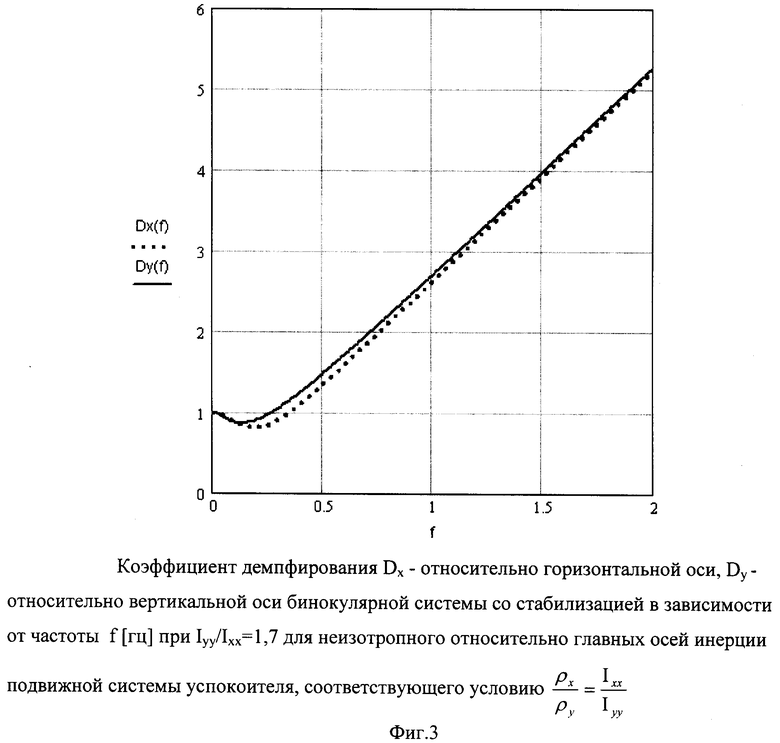
На фиг.3 представлена частотная зависимость коэффициента демпфирования по тем же осям для неизотропного успокоителя, соответствующего предлагаемой схеме устройства.
Данная схема построения устройства позволяет обеспечить существенно лучшую изотропность коэффициента демпфирования системы стабилизации по осям при отсутствии изотропности моментов инерции подвижной части, что позволяет достичь эффективной стабилизации изображения при колебаниях корпуса на различных частотах относительно различных осей при минимальных габаритно-весовых характеристиках прибора.
Литература
[1] Фроимсон И.М., Макаров Е.Ю., Сочилов Л.Ф., Патент РФ №2136030, 1998 г.
[2] Фроимсон И.М., Макаров Е.Ю., Лихачев А.Б., Патент РФ №2229149, 2003 г.
[3] Фроимсон И.М., «Стабилизация изображения в наблюдательных приборах», - Специальная техника, 2002 г., №6, стр.16-24.
| название | год | авторы | номер документа |
|---|---|---|---|
| БИНОКУЛЯРНАЯ СИСТЕМА СО СТАБИЛИЗАЦИЕЙ ИЗОБРАЖЕНИЯ | 2003 |
|
RU2229149C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ | 2016 |
|
RU2631026C1 |
| БИНОКУЛЯРНАЯ СИСТЕМА СО СТАБИЛИЗАЦИЕЙ ИЗОБРАЖЕНИЯ | 1998 |
|
RU2136030C1 |
| ИНЕРЦИОННАЯ СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ ОПТИЧЕСКИХ ПРИБОРОВ | 2012 |
|
RU2514145C1 |
| БИНОКЛЬ | 2006 |
|
RU2316030C1 |
| КОМБИНИРОВАННЫЙ ДВУХКАНАЛЬНЫЙ НАБЛЮДАТЕЛЬНЫЙ ПРИБОР | 2011 |
|
RU2483336C1 |
| СИСТЕМА ПОСАДКИ САМОЛЕТОВ | 1994 |
|
RU2086471C1 |
| Оптическое устройство наблюдения со стабилизацией изображения | 1989 |
|
SU1691813A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
| Подвес трехосного гиростабилизатора киноаппарата | 1981 |
|
SU989321A1 |
Бинокулярная система содержит два объектива, два окуляра, карданов подвес, закрепленный на корпусе, установленную на кольце карданова подвеса, имеющего две степени свободы, подвижную инерционную систему, включающую в себя оборачивающую систему и консоль подвижной инерционной системы, магнитную пружину, связывающую подвижную инерционную систему с корпусом, успокоитель колебаний подвижной системы, содержащий закрепленную на консоли пластину успокоителя из немагнитного материала с малым удельным электрическим сопротивлением, магнитный элемент успокоителя, установленный на корпусе. Магнитная пружина выполнена в виде сердечника из магнитомягкого материала, установленного с одной стороны консоли на подвижной системе, и постоянного магнита магнитной пружины, установленного на корпусе, полюсом в направлении сердечника. Пластина успокоителя установлена с противоположной стороны консоли. Магнитный элемент успокоителя - постоянный магнит, установленный полюсом в направлении пластины успокоителя. Контуры проекции магнитного элемента на пластину успокоителя ориентированы вдоль проекций главных осей инерции подвижной системы на пластину успокоителя. Технический результат - создание простой системы со стабилизацией изображения, имеющей небольшие габариты и массу и обеспечивающей идентичность характеристик стабилизации при различных направлениях колебания корпуса для различных частот. 5 з.п. ф-лы, 3 ил.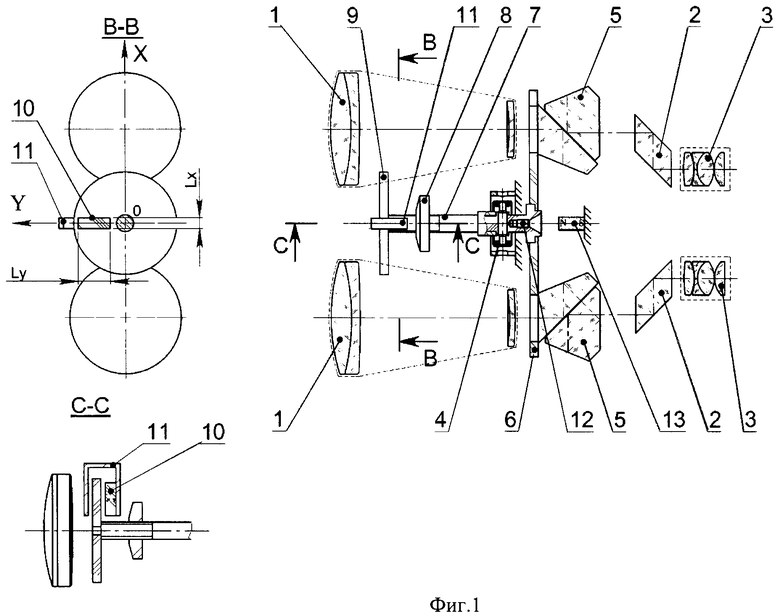
1. Бинокулярная система со стабилизацией изображения, содержащая два объектива, два окуляра, карданов подвес, закрепленный на корпусе, установленную на кольце карданова подвеса, имеющего две степени свободы, подвижную инерционную систему, включающую в себя оборачивающую систему и консоль подвижной инерционной системы, магнитную пружину, связывающую подвижную инерционную систему с корпусом, успокоитель колебаний подвижной системы, содержащий закрепленную на консоли пластину успокоителя из немагнитного материала с малым удельным электрическим сопротивлением, магнитный элемент успокоителя, установленный на корпусе, отличающаяся тем, что магнитная пружина выполнена в виде сердечника из магнитомягкого материала, установленного с одной стороны консоли на подвижной системе, и постоянного магнита магнитной пружины, установленного на корпусе, полюсом в направлении сердечника, а пластина успокоителя установлена с противоположной стороны консоли, при этом магнитный элемент успокоителя выполнен в виде постоянного магнита, установленного своим полюсом в направлении пластины успокоителя таким образом, что контуры проекции магнитного элемента на пластину успокоителя ориентированы вдоль проекций главных осей инерции подвижной системы на пластину успокоителя.
2. Бинокулярная система со стабилизацией изображения по п.1, отличающаяся тем, что магнитный элемент успокоителя выполнен таким образом, что размеры его проекции на поверхность пластины успокоителя в направлениях проекций главных осей инерции подвижной системы на поверхность пластины успокоителя соотносятся как  , где Iхх, Iуу - моменты инерции подвижной системы относительно главных осей инерции подвижной системы; Lx, Ly - размеры проекции магнитного элемента успокоителя на поверхность пластины успокоителя в направлениях проекций этих же главных осей инерции подвижной системы соответственно.
, где Iхх, Iуу - моменты инерции подвижной системы относительно главных осей инерции подвижной системы; Lx, Ly - размеры проекции магнитного элемента успокоителя на поверхность пластины успокоителя в направлениях проекций этих же главных осей инерции подвижной системы соответственно.
3. Бинокулярная система со стабилизацией изображения по п.1, отличающаяся тем, что магнитный элемент успокоителя выполнен в форме прямого параллелепипеда.
4. Бинокулярная система со стабилизацией изображения по п.1, отличающаяся тем, что сердечник магнитной пружины установлен с возможностью перемещения вдоль оси консоли.
5. Бинокулярная система со стабилизацией изображения по п.1, отличающаяся тем, что магнитный элемент магнитной системы успокоителя снабжен магнитным замыкателем, выполненным из магнитомягкого материала, одним концом соединенным с магнитным элементом, а другим концом охватывающим пластину успокоителя, установленную на консоли.
6. Бинокулярная система со стабилизацией изображения по любому из пп.1-5, отличающаяся тем, что в воздушном промежутке перед каждым окуляром установлена ромб-призма с возможностью совместного вращения вместе с окуляром вокруг оси, параллельной продольной оси прибора.
| БИНОКУЛЯРНАЯ СИСТЕМА СО СТАБИЛИЗАЦИЕЙ ИЗОБРАЖЕНИЯ | 2003 |
|
RU2229149C1 |
| БИНОКУЛЯРНАЯ СИСТЕМА СО СТАБИЛИЗАЦИЕЙ ИЗОБРАЖЕНИЯ | 1998 |
|
RU2136030C1 |
| US 5089911 А, 18.02.1992 | |||
| US 5029995 А, 09.07.1991 | |||
| JP 10228045 А, 25.08.1998. | |||

