Изобретение относится к приборостроению, связано со стабилизацией изображения наблюдаемых объектов в оптических приборах, работающих на подвижном основании, и предназначено для создания инерционных систем стабилизации изображения.
Известны системы стабилизации, использующие инерционный принцип. Из наиболее близких - патент N 3843776, заявитель фирма "Carl Zeiss", ФРГ [1], с использованием инерционного способа стабилизации и успокоителя на вихревых токах, патент РФ №2136030, заявитель ОАО «ЗОМЗ» [2] и патент РФ №2229149, заявители Фроимсон И.М., Макаров Е.Ю., Лихачев А.Б. [3] с использованием стабилизированных платформ инерционного типа. В данных системах используется инерционная платформа, установленная на подвесе, имеющая две степени свободы. Для управления платформой применены пружина, связывающая платформу с корпусом, и успокоитель колебаний с использованием вихревых токов, создающий тормозящий момент сил, пропорциональный разности угловых скоростей подвижной платформы и корпуса прибора.
Недостатком данных систем является то, что для подавления паразитных колебаний на резонансной частоте системы требуется достаточно высокая эффективность успокоителя колебаний, что вредно сказывается на эффективности стабилизатора на частотах выше резонансной. Вредное влияние высокой эффективности успокоителя объясняется тем, что успокоитель пропорционально своей эффективности снижает коэффициент демпфирования системы, т.к. дополнительно связывает инерционную подвижную платформу с корпусом прибора.
Как показано в работе [4], уравнение движения инерционной платформы с пружиной и успокоителем колебаний может быть представлено следующим образом:

где I - момент инерции подвижной платформы относительно оси подвеса;
ρ - коэффициент эффективности успокоителя;
κ - коэффициент момента упругости пружины подвеса;
Θ - угол отклонения корпуса прибора относительно рассматриваемой оси;
φ - угол поворота подвижной платформы относительно рассматриваемой оси.
Коэффициент демпфирования колебаний инерционной платформой определяется из (1) как

где 
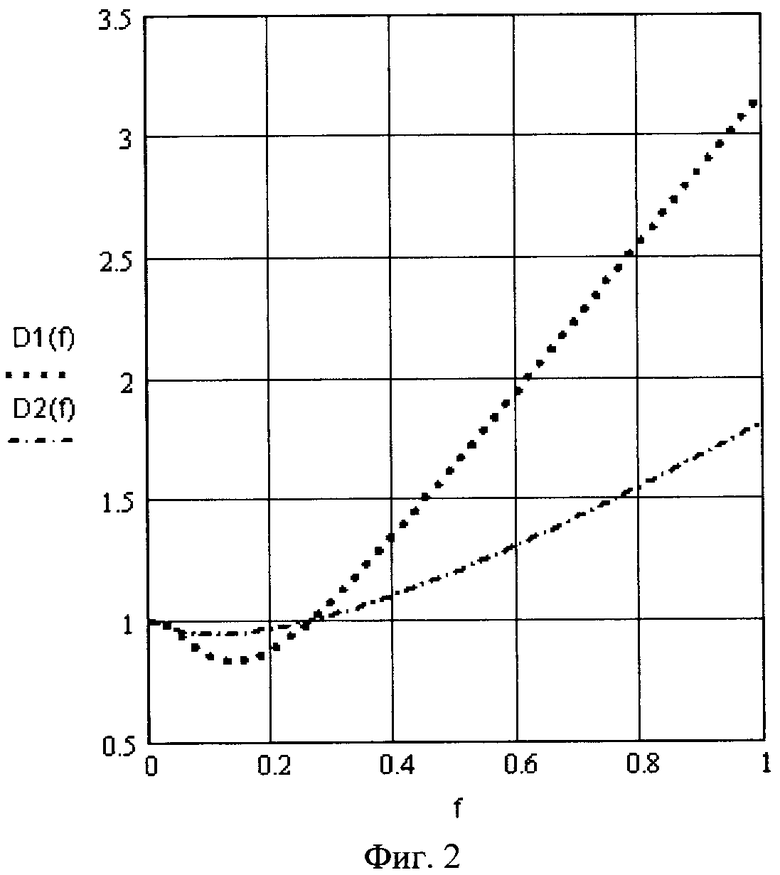
Зависимость коэффициента демпфирования такой платформы от частоты для 
На фигуре 2 представлены для сравнения коэффициенты демпфирования платформ с различными коэффициентами эффективности успокоителя:
D1 для 

Как видно из графиков фигуры 2, улучшение коэффициента демпфирования на резонансной частоте за счет увеличения коэффициента эффективности успокоителя достигнуто, но при этом значительно, почти в два раза ухудшился коэффициент демпфирования платформы на частотах 1 Гц и более.
Достижение приемлемых коэффициентов демпфирования как на частоте резонанса системы, так и на более высоких частотах в таких системах является компромиссным.
Технической задачей, решаемой изобретением, является создание эффективной системы стабилизации, обладающей высокими демпфирующими свойствами и не имеющей провалов коэффициента демпфирования на резонансной частоте системы.
Для достижения поставленной задачи и устранения изложенных недостатков стабилизирующих инерционных платформ с успокоителем колебаний, для создания эффективной инерционной системы стабилизации изображения оптических приборов предлагается инерционная система стабилизации, содержащая инерционную платформу, установленную на корпусе прибора с возможностью поворота относительно оси, пружину, связывающую подвижную платформу с корпусом прибора, успокоитель колебаний на основе вихревых токов, компенсатор успокоителя, содержащий датчик угловой скорости, установленный на корпусе прибора и соединенный со входом усилителя сигнала датчика угловой скорости, моментный привод подвижной платформы, соединенный с выходом усилителя сигнала датчика угловой скорости и создающий момент сил, приложенный к подвижной платформе, пропорциональный угловой скорости корпуса прибора, но противоположно направленный. В качестве датчика угловой скорости колебаний корпуса прибора применен твердотельный полупроводниковый датчик, серийно выпускаемый промышленностью, а в качестве моментного привода подвижной платформы - соленоид с катушкой, установленной на корпусе прибора, и сердечником соленоида, соединенным с подвижной платформой.
На фигуре 3 представлена инерционная система стабилизации изображения оптических приборов, содержащая корпус прибора (1), инерционную платформу (2), установленную с возможностью поворота относительно оси (3), пружину (4), успокоитель колебаний на основе вихревых токов (5), компенсатор успокоителя (6), состоящий из датчика угловой скорости корпуса (7), усилителя сигнала датчика угловой скорости (8), моментного привода (9).
Уравнение движения такой системы может быть представлено следующим образом:

где µ - коэффициент эффективности компенсатора успокоителя, численно равный моменту сил компенсатора, приложенному к подвижной платформе, на единицу угловой скорости корпуса прибора.
Коэффициент демпфирования системы dk, описываемой уравнением (3) определяется выражением

где 
Введение компенсатора успокоителя позволяет одновременно обеспечить отсутствие усиления колебаний на резонансной частоте и высокий уровень коэффициента демпфирования системы на частотах, выше резонансной. На фигуре 4 для сравнения представлены коэффициенты демпфирования D1 инерционной системы стабилизации на основе платформ с успокоителем колебаний при 


Данное техническое решение позволяет создать эффективную систему стабилизации, не имеющей провалов коэффициента демпфирования на резонансной частоте и обладающей высокой демпфирующей способностью на частотах, больших резонансной. Положительный эффект компенсатора имеет место в диапазоне эффективности компенсатора 0,1ρ≤µ≤ρ.
Сущность изобретения заключается в том, что подвижная инерционная платформа, установленная на корпусе прибора с возможностью поворота относительно оси, пружина, связывающая подвижную платформу с корпусом прибора, успокоитель колебаний на основе вихревых токов, компенсатор успокоителя, содержащий датчик угловой скорости, установленный на корпусе прибора и соединенный со входом усилителя сигнала датчика угловой скорости, моментного привода подвижной платформы, соединенного с выходом усилителя сигнала датчика угловой скорости и создающего момент сил, приложенный к подвижной платформе, пропорциональный угловой скорости корпуса прибора, но противоположно направленный, представляют собой развязанную с корпусом прибора инерционную стабилизированную в пространстве систему, обеспечивающую высокий коэффициент демпфирования колебаний при отсутствии провалов коэффициента демпфирования на резонансной частоте системы. В качестве датчика угловой скорости колебаний корпуса прибора применен твердотельный полупроводниковый датчик, серийно выпускаемый промышленностью, а в качестве моментного привода подвижной платформы - соленоид с катушкой, установленной на корпусе, и сердечником соленоида, установленным на подвижной платформе.
Введение компенсатора успокоителя, содержащего датчик угловой скорости, установленный на корпусе прибора, соединенный со входом усилителя сигнала датчика угловой скорости, моментный привод подвижной платформы, соединенный с выходом усилителя сигнала датчика угловой скорости и создающий момент сил, приложенный к подвижной платформе, пропорциональный угловой скорости корпуса прибора, но противоположно направленный, обеспечивает компенсацию вредного момента сил успокоителя, «уводящего» подвижную платформу при колебаниях корпуса прибора, и тем самым существенно повышает эффективность инерционной системы стабилизации как на резонансной частоте системы, так и на более высоких частотах.
Прибор работает следующим образом. При колебаниях корпуса прибора (1) относительно оси (3) инерционная подвижная платформа (2) сохраняет свое угловое положение в пространстве за счет своего момента инерции относительно оси (3). При панорамировании корпусом прибора или колебаниях корпуса пружина (4) возвращает подвижную инерционную платформу в центральное относительно корпуса положение. Возникающие колебания гасятся успокоителем колебаний (5) на основе вихревых токов. В процессе колебаний корпуса прибора датчик угловой скорости (7) формирует электрический сигнал, пропорциональный угловой скорости корпуса прибора относительно оси (3). Полученный сигнал усиливается усилителем (8) и направляется на моментный привод (9), создающий момент сил, приложенный к подвижной платформе (2), компенсирующий вредную составляющую момента сил успокоителя (5). Моментный привод (9) может быть выполнен, например, в виде соленоида, катушка которого установлена на корпусе прибора, а сердечник связан с подвижной инерционной платформой.
Данная схема построения устройства позволяет обеспечить построение эффективной инерционной системы стабилизации, имеющей высокий коэффициент демпфирования колебаний корпуса прибора при одновременном подавлении раскачивания подвижной платформы на резонансной частоте.
Литература
[1] Патент N 3843776, заявитель фирма "Carl Zeiss", ФРГ.
[2] Фроимсон И.М., Макаров Е.Ю., Сочилов Л.Ф., Патент РФ №2136030, 1998 г.
[3] Фроимсон И.М., Макаров Е.Ю., Лихачев А.Б., Патент РФ №2229149, 2003 г.
[4] Фроимсон И.М., «Стабилизация изображения в наблюдательных приборах». Специальная техника, 2002 г., №6, стр.16-24.
| название | год | авторы | номер документа |
|---|---|---|---|
| БИНОКУЛЯРНАЯ СИСТЕМА СО СТАБИЛИЗАЦИЕЙ ИЗОБРАЖЕНИЯ | 2011 |
|
RU2472191C1 |
| БИНОКУЛЯРНАЯ СИСТЕМА СО СТАБИЛИЗАЦИЕЙ ИЗОБРАЖЕНИЯ | 2003 |
|
RU2229149C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| БИНОКУЛЯРНАЯ СИСТЕМА СО СТАБИЛИЗАЦИЕЙ ИЗОБРАЖЕНИЯ | 1998 |
|
RU2136030C1 |
| СПОСОБ ПОДБОРА СПОРТИВНОГО ИНВЕНТАРЯ С УЧЕТОМ РЕОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК СНЕЖНОЙ ТРАССЫ | 2019 |
|
RU2706243C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ ОПТИЧЕСКИХ КАНАЛОВ | 2024 |
|
RU2831620C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2016 |
|
RU2656119C2 |
| ГИРОГОРИЗОНТ | 2001 |
|
RU2207509C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЯЗКОУПРУГИХ ЖИДКИХ СРЕД И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2411500C1 |
| ВИБРАЦИОННАЯ ТРАНСПОРТИРУЮЩАЯ МАШИНА | 2012 |
|
RU2532235C2 |


Изобретение относится к стабилизации изображения наблюдаемых объектов в оптических приборах, работающих на подвижном основании, и предназначено для создания инерционных систем стабилизации изображения. Инерционная система стабилизации изображения оптических приборов содержит инерционную платформу, установленную на корпусе прибора с возможностью поворота относительно оси, пружину, связывающую подвижную платформу с корпусом, успокоитель колебаний на основе вихревых токов, компенсатор успокоителя, содержащий датчик угловой скорости, установленный на корпусе прибора и соединенный со входом усилителя сигнала датчика угловой скорости, моментный привод подвижной платформы, соединенный с выходом усилителя сигнала датчика угловой скорости и создающий момент сил, приложенный к подвижной платформе, пропорциональный по амплитуде угловой скорости корпуса прибора, но противоположно направленный. Компенсатор успокоителя установлен таким образом, что его коэффициент эффективности µ соотносится с коэффициентом эффективности успокоителя ρ как 0,1ρ≤µ≤ρ. В качестве моментного привода подвижной платформы применен соленоид с катушкой, установленной на корпусе, и сердечником соленоида, установленным на подвижной платформе. Технический результат заключается в повышении коэффициента демпфирования колебаний корпуса при одновременном подавлении раскачивания подвижной платформы на резонансной частоте. 2 з.п. ф-лы, 4 ил.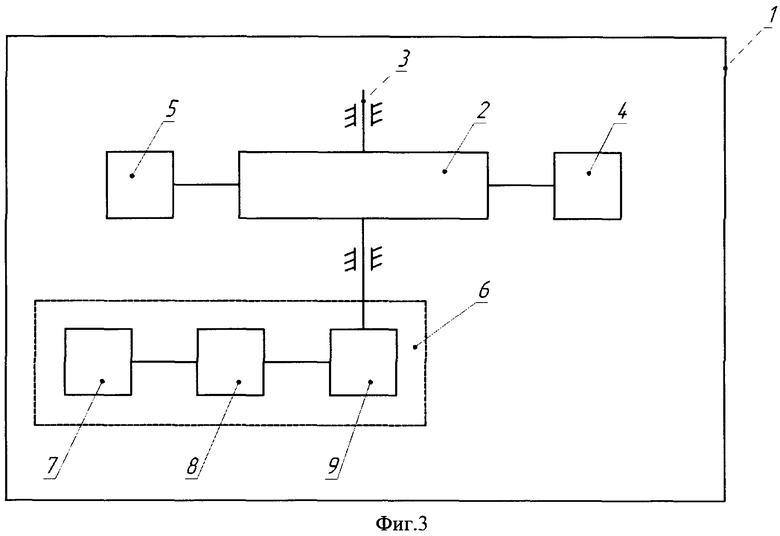
1. Инерционная система стабилизации изображения оптических приборов, содержащая инерционную платформу, установленную на корпусе с возможностью поворота относительно оси, пружину, связывающую инерционную платформу с корпусом, успокоитель колебаний на основе вихревых токов, отличающаяся тем, что дополнительно введен компенсатор успокоителя, содержащий датчик угловой скорости, установленный на корпусе прибора и соединенный со входом усилителя сигнала датчика угловой скорости, моментный привод инерционной платформы, соединенный с выходом усилителя сигнала датчика угловой скорости и создающий момент сил, приложенный к инерционной платформе, пропорциональный по амплитуде угловой скорости корпуса прибора, но противоположно направленный, причем компенсатор успокоителя установлен таким образом, что его коэффициент эффективности µ соотносится с коэффициентом эффективности успокоителя ρ как 0,1ρ≤µ≤ρ.
2. Инерционная система стабилизации изображения оптических приборов по п.1, отличающаяся тем, что в качестве моментного привода подвижной платформы применен соленоид с катушкой, установленной на корпусе прибора, и сердечником соленоида, установленным на подвижной платформе.
3. Инерционная система стабилизации изображения оптических приборов по любому из п.1 или 2, отличающаяся тем, что в качестве датчика угловой скорости применен твердотельный полупроводниковый датчик.
| US 5117246 A 26.05.1992 | |||
| Транспортер для перемещения и сброса лесоматериалов в накопитель | 1972 |
|
SU444713A1 |
| US 2006133786 A1 22.06.2006 | |||
| US 2012141101 A1 07.06.2012 | |||
| US 2011050917 A1 03.03.2011 | |||

