Уровень техники
Технический отчет (TR) Партнерского проекта третьего поколения (3GPP) 25.814 V7.0.0, "Physical Layer Aspects for Evolved Universal Terrestrial Radio Access" (UTRA) (редакция 7), июнь 2006 года, и Технические требования (TS) 3GPP 36.211 V8.1.0, "Physical Channels and Modulation" (редакция 8), ноябрь 2007 года, описывают физический уровень усовершенствованной сети UTRA (E-UTRAN), способный работать в очень широком диапазоне рабочих полос пропускания канала и несущих частот и с "микро"-сотами с малым диаметром вплоть до "макро"-сот с большим диаметром, имеющих 100-километровые зоны охвата. 3GPP публикует технические требования, которые стандартизируют множество видов систем сотовой беспроводной связи.
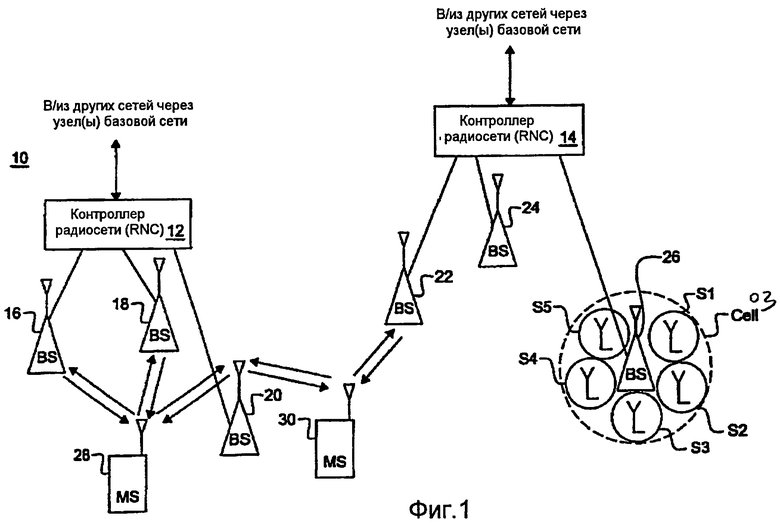
Фиг.1 иллюстрирует типичную систему 10 сотовой беспроводной связи. Контроллеры радиосети (RNC) 12, 14 управляют различными функциями радиосети, в том числе, например, установлением однонаправленного канала радиодоступа, передачей обслуживания с разнесением и т.д. В общем, каждый RNC направляет вызовы в и из мобильной станции (MS) или удаленного терминала или пользовательского оборудования (UE), через соответствующую базовую станцию(и) (BS), которые связываются друг с другом через каналы нисходящей линии связи (DL) (т.е. от базовой станции к мобильной станции, или прямой) и UL (т.е. от мобильной станции к базовой станции, или обратной). На фиг.1 RNC 12 показан связанным с BS 16, 18, 20, a RNC 14 показан связанным с BS 22, 24, 26.
Каждая BS, или узел В в терминологии 3G, обслуживает географическую область, которая поделена на одну или более сот. На фиг.1 BS 26 показана как имеющая пять антенных секторов S1-S5, которые, можно сказать, составляют соту BS 26, хотя сектор или другая область, обслуживаемая посредством сигналов от BS, также может называться сотой. Помимо этого, BS может использовать несколько антенн для того, чтобы передавать сигналы в UE. BS типично связаны со своими соответствующими RNC посредством выделенных телефонных линий связи, оптоволоконных линий связи, линий микроволновой связи и т.д., RNC 12, 14 соединены с внешними сетями, такими как телефонная коммутируемая сеть общего пользования (PSTN), Интернет и т.д. через один или более узлов базовой сети, таких как центр коммутации мобильной связи (не показан) и/или узел службы пакетной радиопередачи (не показан).
Следует понимать, что расположение функциональностей, проиллюстрированных на фиг.1, может быть модифицировано в Е-UTRAN и других сетях связи. Например, функциональность RNC 12, 14 может быть перемещена в узлы В 22, 24, 26, и другие функциональности могут быть перемещены в другие узлы в сети.
Чтобы справляться с различными условия радиосвязи, которые могут возникать в E-UTRAN, в нисходящей линии связи используется мультиплексирование с ортогональным частотным разделением каналов (OFDM) или множественный доступ с ортогональным частотным разделением каналов (OFDMA). OFDMA - это технология радиодоступа (RAT), которая может адаптироваться к различным условиям распространения радиосигнала, которые могут возникать в E-UTRAN. В частности, OFDM-система может адаптировать свои параметры передачи по DL не только во временной области, как в текущих системах связи, но также и в частотной области. Системы связи OFDMA также описываются в литературе, например в заявке на патент (США) номер 11/289184 авторов В.Lindoff и др.
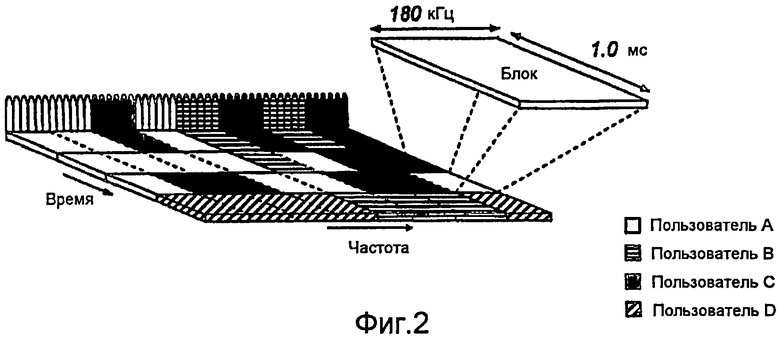
В системе связи OFDMA доступный поток данных секционируется на определенное число узкополосных поднесущих, которые передаются параллельно. Поскольку каждая поднесущая является узкополосной, каждая несущая подвергается только неглубокому замиранию, которое упрощает демодуляцию каждой поднесущей. Базовое частотно-временное расположение DL в OFDM-системе проиллюстрировано на фиг.2, которая показывает множество OFDM-поднесущих, которые расположены рядом в частотном направлении. Радиоресурс, выделяемый определенному пользователю, может называться "блоком" или "участком", который является определенным числом определенных поднесущих, используемых в течение определенного периода времени. Различные группы поднесущих используются в разное время для различных пользователей, и фиг.2 иллюстрирует ресурсные блоки для четырех пользователей А, В, С, D. В нисходящей линии связи примерной OFDM-системы, проиллюстрированной на фиг.2, блок включает в себя 12 поднесущих (не все из которых показаны для ясности), разнесенных на 15 килогерц (кГц), которые вместе занимают приблизительно 180 кГц по частоте и 1,0 миллисекунду (мс) во времени. Следует понимать, что расположение по фиг.2 является только примером, и что может использоваться другое расположение.
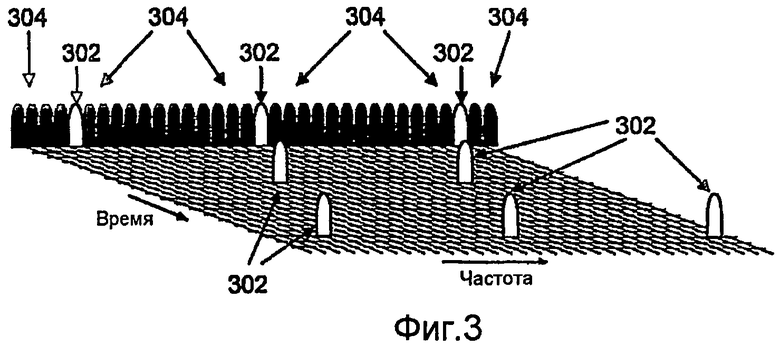
Для синхронизации приемника и других целей опорные символы или сигналы, которые могут называться пилотами, могут передаваться из каждой базовой станции на известной частоте и в известные моменты времени. Такие опорные сигналы описываются, например, в разделе 7.1.1.2.2 из 3GPP TR 25.814 и в разделах 6.10 и 6.11 из 3GPP TS 36.211. Примерное частотно-временное расположение с восемью такими пилотами 302 проиллюстрировано на фиг.3, которая показывает восемь поднесущих, имеющих пилоты 302 в частотно-временной плоскости OFDM. Другие поднесущие OFDM 304 транспортируют данные, но для ясности они указываются на фиг.3 только в один момент в частотно-временной плоскости. Следует понимать, что каждый ресурсный блок типично включает в себя несколько пилотов на различных поднесущих. Также следует понимать, что BS может использовать множество передающих антенн для того, чтобы передавать информацию в соту/сектор/область, и эти различные передающие антенны могут отправлять, соответственно, различные пилоты.
Согласно разделу 7.1.2.4 из 3GPP TR 25.814 и разделам 6.11 и 5.7 из 3GPP TS 36.211 E-UTRAN имеет начальные каналы доступа, такие как сигнал синхронизации (SyS) и канал случайного доступа (RACH), которые являются устойчивыми, позволяя UE осуществлять доступ к системе при многих различных условиях радиосвязи. SyS в E-UTRAN состоит из первичного сигнала синхронизации (P-SyS) и вторичного сигнала синхронизации (S-SyS). Три P-SyS в настоящий момент заданы в E-UTRAN и распространяются в сотах E-UTRAN. Сопоставимые каналы синхронизации и каналы случайного доступа зачастую предоставляются в других цифровых системах связи, хотя им могут даваться другие имена.
Чтобы осуществлять доступ к сети, UE выполняет алгоритм поиска сот, который начинается с корреляции посредством UE своего принимаемого сигнала с локальными образцами всех трех Р-SyS, чтобы синхронизировать себя с системным временем. После этого этапа UE знает позицию S-SyS и переходит ко второй стадии алгоритма поиска сот, на которой UE декодирует S-SyS, который содержит идентификатор группы соты. Идентификатор группы соты, вместе с информацией о том, какой из трех P-SyS присутствует, устанавливает идентификатор соты физического уровня для соты. UE в таком случае имеет всю информация, которая ему требуется для того, чтобы считывать информацию о широковещательной системе и устанавливать связь с сетью.
P-SyS в E-UTRAN основаны на последовательностях Задова-Чу (ZC), которые являются специальным классом обобщенных последовательностей, подобных линейно-частотно-модулированным (GCL). ZC-последовательность, имеющая длину N, где N является нечетным числом, и индекс последовательности u, задается посредством следующего выражения:
Zu(k)=exp(-j·n/N·u·k·(k+1)), k=0, 1, … N-1.
Три различных сигнала P-SyS в E-UTRAN - это ZC-последовательности одинаковой длины N с различными индексами последовательности u.
ZC-последовательности имеют специальные свойства, некоторые из которых являются желательными, но некоторые требуют особого внимания. С положительной стороны, ZC-последовательности принадлежат классу CAZAC-последовательностей, которые имеют постоянную амплитуду (СА), взаимные корреляции с постоянной амплитудой по всем запаздываниям и нулевую автокорреляцию (ZAC) для запаздываний, не равных нулю. Эти свойства делают ZC-последовательности очень привлекательными для применения при синхронизации. С отрицательной стороны, режим автокорреляции ZC-последовательностей при наличии сдвигов частоты должен учитываться, поскольку он формирует множественные пики в автокорреляционном сигнале, которые создают помехи для точной синхронизации.
При множественных пиках в автокорреляционном сигнале для UE может быть трудным решать, какой пик является корректным, и достигать надлежащей синхронизации. Если дополнительные компоненты или функции приемника внедрены, чтобы идентифицировать корректный пик автокорреляции, возникает несколько недостатков. Приемник становится более сложным, и площадь полупроводниковой микросхемы, требуемой для такой обработки, а также амплитуда электрической энергии, расходуемая посредством такой обработки, возрастает. Большее энергопотребление уменьшает срок непрерывной работы UE с аккумуляторным питанием, таких как мобильные телефоны, пейджеры и т.д.
Сущность изобретения
В соответствии с аспектами этого изобретения предусмотрен способ идентификации корректного пика в выходном сигнале согласованного фильтра в пользовательском оборудовании для системы связи. Способ включает в себя этапы корреляции принимаемого мультиплексированного сигнала с ортогональным частотным разделением с образцами сигнала синхронизации, тем самым формируя выходной сигнал корреляции; детектирования пиков в выходном сигнале корреляции; тестирования пиков во множестве заранее определенных местоположений, которые основаны на свойствах сигнала синхронизации, тем самым формируя множество тестовых сигналов пиков; и определения максимума тестовых сигналов пиков.
Также в соответствии с аспектами этого изобретения предусмотрено устройство в приемнике для идентификации корректного пика в выходном сигнале согласованного фильтра. Устройство включает в себя согласованный фильтр, выполненный с возможностью коррелировать принимаемый мультиплексированный сигнал с ортогональным частотным разделением с образцами сигнала синхронизации и тем самым формировать выходной сигнал корреляции; пиковый детектор, выполненный с возможностью детектировать пики в выходном сигнале корреляции; и процессор, выполненный с возможностью тестировать пики во множестве заранее определенных местоположений, которые основаны на свойствах сигнала синхронизации, и тем самым формировать множество тестовых сигналов пиков, и определять максимум тестовых сигналов пиков.
Также в соответствии с аспектами этого изобретения предоставляется машиночитаемый носитель, кодированный с помощью компьютерной программы, которая, когда исполняется посредством компьютера, заставляет компьютер осуществлять способ идентификации корректного пика в выходном сигнале согласованного фильтра в пользовательском оборудовании для системы связи. Способ включает в себя этапы корреляции принимаемого мультиплексированного сигнала с ортогональным частотным разделением с образцами сигнала синхронизации, тем самым формируя выходной сигнал корреляции; детектирования пиков в выходном сигнале корреляции; тестирования пиков во множестве заранее определенных местоположений, которые основаны на свойствах сигнала синхронизации, тем самым формируя множество тестовых сигналов пиков; и определения максимума тестовых сигналов пиков.
Краткое описание чертежей
Эти некоторые признаки, преимущества и цели данного изобретения должны стать понятными при прочтении этого описания вместе с чертежами, на которых:
Фиг.1 иллюстрирует систему сотовой радиосвязи;
Фиг.2 иллюстрирует временное и частотное расположение поднесущих в системе связи, использующей мультиплексирование с ортогональным частотным разделением;
Фиг.3 иллюстрирует временное и частотное расположение поднесущих, которые включают в себя пилоты;
Фиг.4 иллюстрирует отношение между элементами синхронизирующей последовательности и поднесущими;
Фиг.5 является блок-схемой модуля приемника в системе связи;
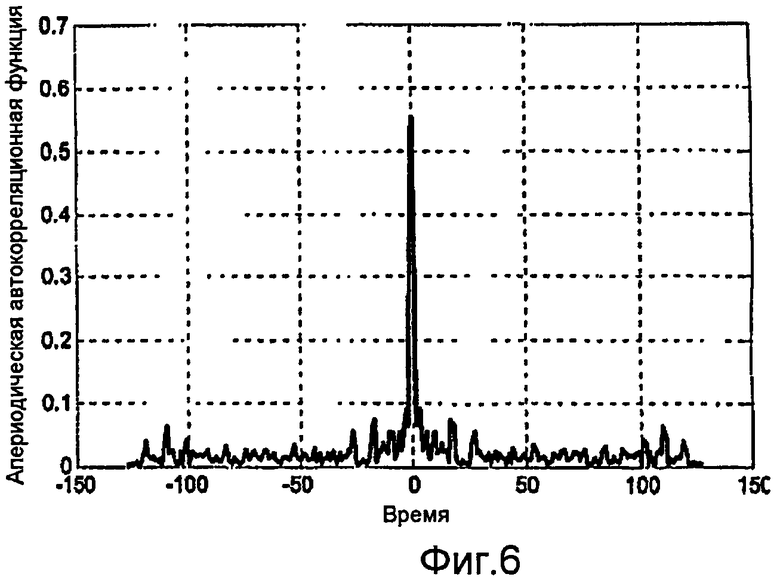
Фиг.6 является графиком амплитуды апериодической автокорреляционной функции в зависимости от времени при отсутствии сдвига частоты;
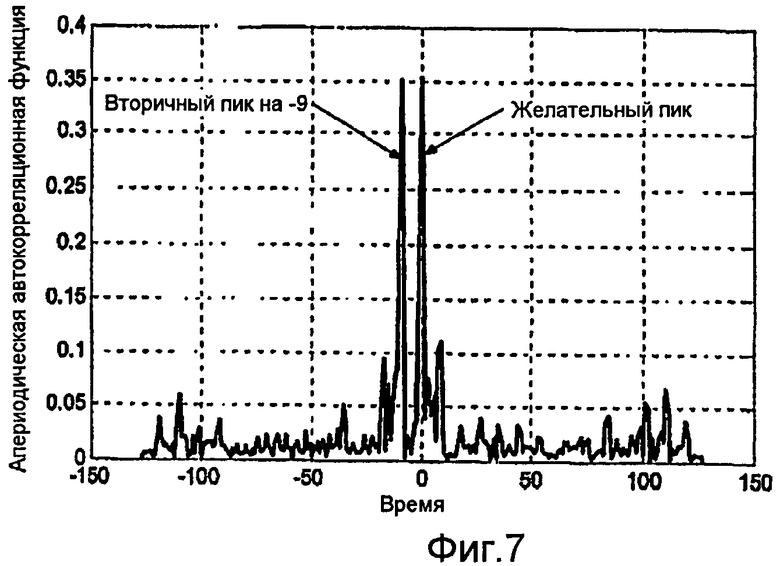
Фиг.7 является графиком амплитуды апериодической автокорреляционной функции в сравнении со временем при наличии сдвига частоты;
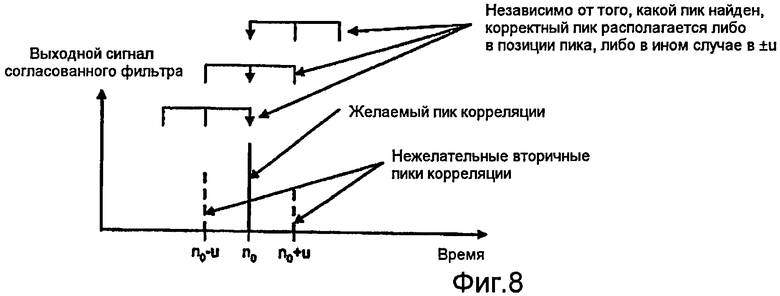
Фиг.8 иллюстрирует местоположения вторичных пиков в апериодической автокорреляционной функции;
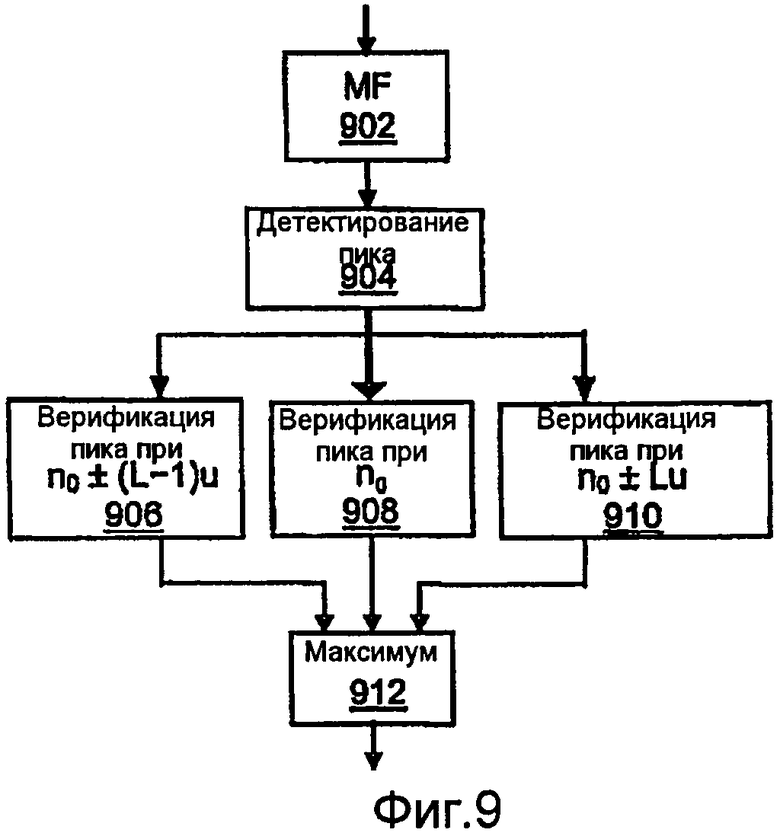
Фиг.9 является блок-схемой процедуры для идентификации надлежащего пика в выходе согласованного фильтра;
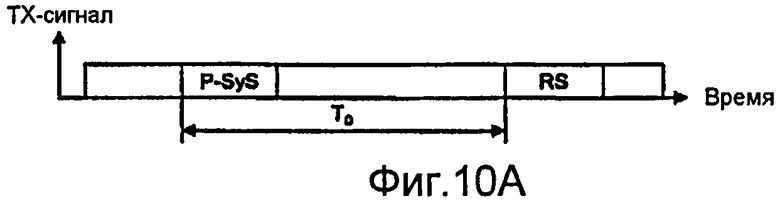
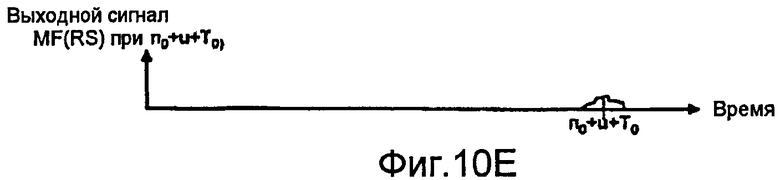
Фиг.10А иллюстрирует передаваемый сигнал, имеющий опорный сигнал;
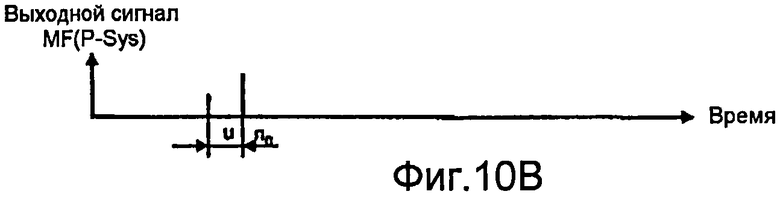
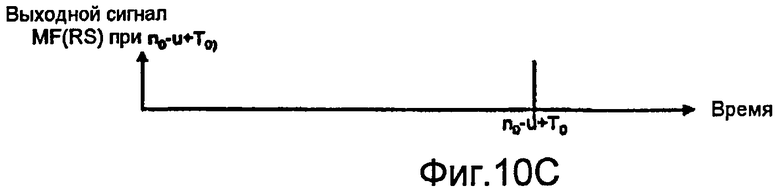
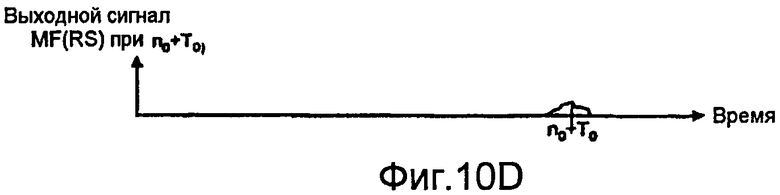
Фиг.10В, 10С, 10D и 10Е иллюстрируют выходной сигнал согласованного фильтра приемника в разное время для передаваемого сигнала по фиг.10А;
Фиг.11 является блок-схемой модуля приемника в системе связи; и
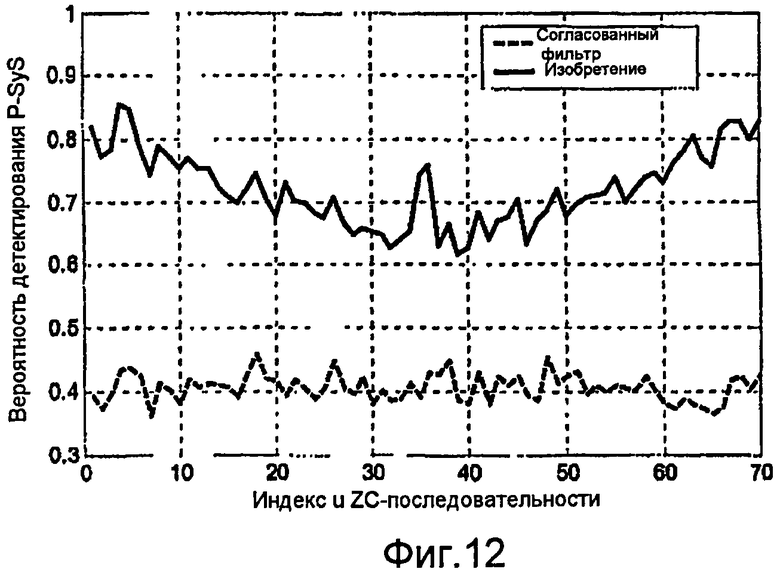
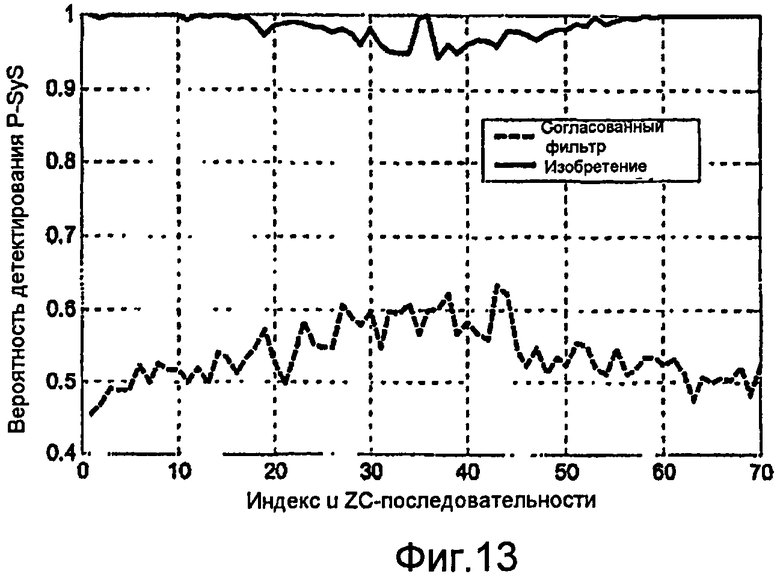
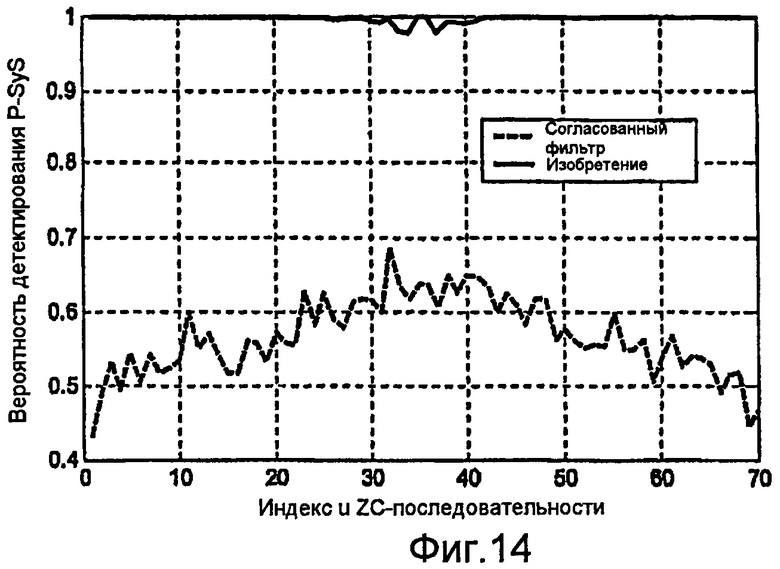
Фиг.12, 13 и 14 являются графиками вероятности детектирования в зависимости от индекса последовательности.
Подробное описание
Следует понимать, что это изобретение не ограничено ZC-последовательностями или системами связи, которые преобразуют ZC-последовательности в поднесущие OFDM-сигнала, как описано выше. Другими типами последовательностей, которые могут иметь такой же самый режим сдвига частоты, как ZC-последовательности, являются, например, другие GCL-последовательности. Помимо этого, не имеет значения, равны длина М IFFT (обратного быстрого Фурье-преобразования) и длина N ZC-последовательности или M>N, поскольку в последнем случае IFFT осуществляет интерполяцию, и таким образом главный режим по-прежнему такой же. Кроме того, не имеет значения, преобразуется ZC-последовательность во временной или частотной области, поскольку ZC-последовательность, трансформированная посредством IFFT, снова дает в результате CAZAC-последовательность (последовательность с постоянной амплитудой и нулевой автокорреляцией). Помимо этого, данная заявка ориентирована на OFDM-системы просто для сокращения пояснения, но следует понимать, что принципы, описанные в данной заявке, могут внедряться в других цифровых системах связи.
Для нижеследующего пояснения допустим, что P-SyS генерируется посредством преобразования в частотной области ZC-последовательность длины N в поднесущие OFDMA-сигнала и последующего трансформирования во временную область с помощью обратного быстрого преобразования Фурье (IFFT). Такое формирование в частотной области проиллюстрировано посредством фиг.4, которая иллюстрирует элементы ZC-последовательности и поднесущие OFDMA-сигнала как деления на соответствующих горизонтальных линиях, которые совмещаются надлежащим образом. Следует понимать, что расположение по фиг.4 является только примером, и что другое расположение может использоваться.
Чтобы обрабатывать неизвестный сдвиг частоты, UE может иметь приемник, который включает в себя некоторый коррелятор, который согласован с представлением во временной области P-SyS или эквивалентного сигнала синхронизации, при этом следует сказать, что приемник включает в себя согласованный фильтр, имеющий импульсную характеристику, которая соответствует зеркальному (обращенному во времени) комплексно-сопряженному числу P-SyS. Чтобы обрабатывать неизвестный сдвиг частоты, несколько согласованных фильтров внедрены в приемник, причем каждый из этих нескольких согласованных фильтров имеет импульсную характеристику, согласованную с сигналом синхронизации с различным соответствующим предполагаемым сдвигом частоты.
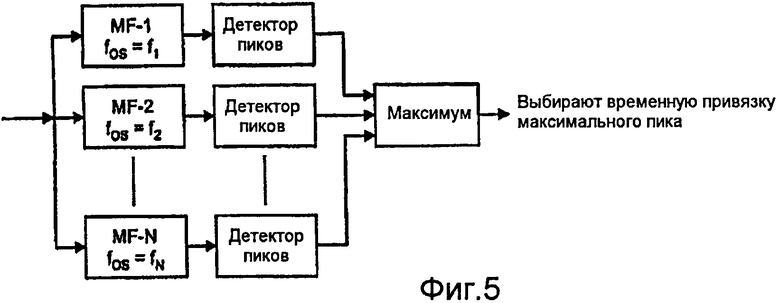
Фиг.5 является блок-схемой части приемника UE, которая имеет N согласованных фильтров MF-1, MF-2, …, MF-N и N соответствующих пиковых детекторов, которые предоставляют свои выходные сигналы в детектор Мах максимумов. N согласованных фильтров работают параллельно, при этом каждый фильтр предполагает различный соответствующий сдвиг fos частоты. Детектор Мах максимумов по существу сравнивает выходные сигналы всех согласованных фильтров и выбирает фильтр, имеющий наибольший пик, для использования в дальнейшем детектировании временной привязки P-SyS и синхронизации UE-базовая станция. Данные согласованные фильтры могут быть реализованы в аппаратных устройствах, таких как линии задержки с отводами; корреляторах, которые сравнивают входные последовательности с ожидаемыми последовательностями, и эквивалентных устройствах или как программные алгоритмы, исполняемые посредством программируемого процессора в UE. Например, патент (США) номер 7003022 авторов Urabe и др. описывает согласованные фильтры и приемники для систем мобильной радиосвязи.
Если частота гетеродина UE (не показан на фиг.5), который используется для того, чтобы конвертировать принимаемый сигнал UE из радиочастот в основную полосу, является идентичной частоте гетеродина базовой станции, который используется для того, чтобы генерировать передаваемый сигнал базовой станции, и если сдвигами доплеровской частоты можно пренебречь, выходной сигнал, формируемый посредством одного из согласованных фильтров приемника UE, может выглядеть, как на фиг.6. Шум не учитывается на фиг.6, которая является графиком амплитуды апериодической автокорреляционной функции P-SyS во времени. Следует отметить, что выходной сигнал, проиллюстрированный на фиг.6, обладает одним острым пиком, который просто детектировать, и обеспечивает надежное определение временной привязки P-SyS и хорошую синхронизацию UE-базовая станция.
Фиг.7 иллюстрирует выходной сигнал, который может быть сформирован согласованным фильтром в приемнике UE, когда предполагаемый сдвиг частоты согласованного фильтра отличается от сдвига частоты демодулированного сигнала в основной полосе наполовину от ширины полосы частот поднесущей OFDMA-сигнала. Вместо одного острого пика выходной сигнал согласованного фильтра содержит два значительных пика, один из которых располагается в надлежащий момент времени, а другой располагается на 9 временных единиц раньше. Пик в надлежащий момент времени может называться "главным" пиком, а пик, который смещен, может называться "вторичным" пиком. По сравнению с фиг.6 амплитуды как главных, так и вторичных пиков также уменьшаются, помимо других заметных различий.
В любом случае для UE невозможно решить, какой пик является корректным в автокорреляционном выходном сигнале (согласованного фильтра), как проиллюстрировано на фиг.7. Структура на фиг.5, в которой несколько согласованных фильтров работают параллельно с различными предполагаемыми сдвигами частоты, является одним способом решать эту проблему. Предполагается, что один из множества согласованных фильтров имеет предполагаемый сдвиг частоты, который находится близко к фактическому смещению, давая в результате наибольший выходной сигнал. Тем не менее, желательно исключать дополнительную сложность и другие недостатки приемника, имеющего множество согласованных фильтров.
Авторы изобретения обнаружили, что местоположение основного вторичного пика автокорреляции на фиг.7 является независимым от величины сдвига частоты, при условии, что эта величина имеет порядок ширины полосы частот поднесущей или менее. Если обобщить, авторы изобретения обнаружили, что вторичные пики в выходном сигнале автокорреляции возникают при n0±uL и n0±u(L-1), где L - это положительное целое число, которое является наименьшим кратным ширины полосы частот поднесущей df, которая превышает амплитуду |fos| сдвига fos частоты, u - это индекс ZC-последовательности, n0 - это позиция корректного пика, и fos ограничено следующим образом: (L-1)df≤|fos|≤Ldf. Знак сдвига частоты определяет, какой знак используется в вышеприведенных уравнениях.
В частности, для сдвига частоты меньше одной ширины полосы частот поднесущей (т.е. L=1), вторичный пик возникает при n0±u, который иначе является независимым от величины сдвига частоты. Если сдвиг частоты составляет ровно одну ширину полосы частот поднесущей (т.е. fos=df), главный пик при n0 исчезает, и только вторичный пик остается при n0+u или n0-u, в зависимости от знака сдвига частоты. Для сдвигов частоты, превышающих одну ширину полосы частот поднесущей и меньших, чем две ширины полосы частот поднесущей, дополнительный вторичный пик возникает со вторичным пиком вследствие сдвига частоты, равном двойной ширине полосы частот поднесущей (т.е. при n0±2u). Для сдвига частоты, равного двойной ширине полосы частот поднесущей (т.е. os=2df), вторичный пик вследствие сдвига частоты, равного одной ширине полосы частот (т.е. при n0±u), обращается в нуль, и только новый вторичный пик остается.
Как отмечено выше, в общем, для сдвига частоты, равного целому кратному ширины полосы частот поднесущей, только один пик существует в местоположении, полностью определенном посредством сдвига частоты и самой ZC-последовательности. Для сдвига частоты между (L-1) и L ширины полосы частот поднесущей вторичные пики корреляции состоят из пиков корреляции, присутствующих при сдвиге частоты в (L-1) и L ширины полосы частот поднесущей. Следует принимать во внимание, что предыдущее пояснение является верным только для сдвигов частоты, равных целым кратным ширины полосы частот поднесущей. Для других сдвигов частоты другие (гораздо более ослабленные) пики возникают в дополнение ко вторичным пикам, описанным выше, которые опускаются для понятности пояснения. Дополнительно следует принимать во внимание, что предыдущее пояснение является верным для сигнала периодической автокорреляции и является обоснованным приближением для случаев выходного сигнала апериодической автокорреляции согласованного фильтра.
Таким образом, авторы изобретения обнаружили, что расстояние между желаемой позицией главного пика и вторичными пиками в выходных сигналах согласованных фильтров в приемнике определяется посредством индекса u ZC-последовательности, то, опережает ли вторичный пик в или отстает от главного пика, определяется посредством знака сдвига частоты. Вторичные пики автокорреляционной функции находятся в (L-1u) и Lu (в смысле по-модулю-N) временных единицах относительно позиции истинного пика автокорреляции.
Фиг.8 иллюстрирует, что местоположения вторичных пиков определяются посредством индекса ZC-последовательности u. Для главного пика в момент времени n0 вторичный пик может возникать только либо в момент времени n0+u, либо в момент времени n0-u, предполагая, что сдвиг частоты меньше ширины полосы частот поднесущей. Независимо от того, какой пик сигнала корреляции обнаружен посредством пикового детектора, авторы изобретения обнаружили, что главный пик всегда может идентифицироваться посредством тестирования детектированного пика и позиций в ±u относительно детектированного пика. Если P-SyS интерполируется (к примеру, посредством использования IFFT размера М, который превышает длину ZC-последовательности N), смещение вторичных пиков - это ±round(u·M/N), где обозначение round() указывает функцию округления. Как можно видеть в примере по фиг.7, в котором индекс последовательности u=5, М=128 и N=71, вторичный пик локализуется при -round(5·128/71)=-9. Для сдвигов частоты, превышающих одну ширину полосы частот поднесущей, вторичные пики автокорреляции появляются при (L-1)u и Lu (в смысле по-модулю-N) относительно истинного пика при n0.
Таким образом, приемник в соответствии с этим изобретением может иметь меньшую сложность посредством замены набора согласованных фильтров на один согласованный фильтр в детекторе P-SyS, чтобы идентифицировать корректный пик и находить временную привязку P-SyS. Согласованный фильтр может быть коррелятором, согласованным с P-SyS, и этот коррелятор, который может быть реализован посредством надлежащим образом запрограммированного или сконфигурированного электронного процессора, линии задержки с отводами и т.д., используется в качестве устройства основной синхронизации. Если главный пик детектирован, позиция этого (предполагаемого) корректного пика (n0) вместе с позициями вторичных пиков (к примеру, при n0±u) тестируется, чтобы идентифицировать то, какой пик является корректным. Если сдвиги частоты, превышающие одну ширину полосы пропускания поднесущей, могут присутствовать, дополнительные гипотезы при n0±(L-1)u и n0±Lu (понимаемые в смысле по-модулю-N) тестируются с помощью гипотезы при n0.
Блок-схема последовательности операций процедуры для идентификации надлежащего пика на выходе согласованного фильтра проиллюстрирована на фиг.9. Способ начинается на этапе 902 с согласованной фильтрации (MF) сигнала, такого как P-SyS, например, посредством корреляции сигнала с локальным образцом, которая может быть сохранена, ожидаемого сигнала. Способ продолжается на этапе 904 детектированием пика в выходном сигнале, формируемом посредством этапа согласованной фильтрации. На этапах 906, 908, 910 детектированный пик тестируется или верифицируется в заранее определенных местоположениях, которые основаны на свойствах ожидаемого сигнала. Как описано выше для случая ZC-последовательности в качестве ожидаемого сигнала, заранее определенные местоположения - это n0±(L-1)u и n0±Lu, в общем, и n0 и n0±u в случае ожидаемого сдвига частоты меньше ширины полосы частот поднесущей. На этапе 912 максимум верификаций в заранее определенных местоположениях определяется, тем самым идентифицируя надлежащий пик.
Следует принимать во внимание, что, когда сдвиг fos частоты меньше ширины полосы частот поднесущей df, этими тремя местоположениями, чтобы тестировать, являются n0 и n0±u, а когда сдвиг частоты больше df, данные местоположения - это n0, n0±(L-1)u и n0±Lu. Если размер сдвига частоты неизвестен, приемник должен искать пики в (n0±Lu) для всех L, т.е. для l=1, 2, …, L.
Тестирование пиков при n0 и (n0±(L-1)u) и (n0+Lu) (этапы 906-910) может быть сделано несколькими способами. Один способ заключается в том, чтобы предположить, что каждый тестируемый определенный пик является корректным, и действовать в соответствии с этим предположением, к примеру, посредством инициирования детектирования S-SyS или другого сигнала в каждом из идентифицированных пиков. Как результат этого вида "слепого" детектирования, вероятно, что процессы детектирования S-SyS в "неправильных" пиках будут являться ошибочными или обладать гораздо меньшими уровнями доверия, чем детектирование S-SyS при корректном пике.
Другой способ тестировать пики состоит в том, чтобы тестировать каждый из них в сравнении с известными сигналами, предполагая, что текущий тестируемый пик является корректным. Например, если в определенное время после P-SyS известный сигнал, к примеру опорный сигнал, возникает, приемник в каждой гипотезе временной привязки коррелирует с известным сигналом. Этот способ тестирования пиков выходного сигнала согласованного фильтра проиллюстрирован посредством фиг.10. На фиг.10А передаваемый сигнал включает в себя P-SyS и, после интервала времени Т0, опорный сигнал RS. Фиг.10В иллюстрирует выходной сигнал согласованного фильтра приемника, демонстрирующий первичный пик во время n0 и вторичный пик во время n0-u. Фиг.10C иллюстрирует выходной сигнал согласованного фильтра приемника, когда фильтр отрегулирован так, чтобы коррелировать с опорным сигналом RS, показывая острый пик во время n0-u+T0. Фиг.10D иллюстрирует выходной сигнал согласованного фильтра приемника, когда фильтр отрегулирован так, чтобы коррелировать с опорным сигналом RS, демонстрирующим неопределенный сигнал во время n0+Т0. Фиг.10Е иллюстрирует выходной сигнал согласованного фильтра приемника, когда фильтр отрегулирован так, чтобы коррелировать с опорным сигналом RS, показывающим неопределенный сигнал в момент времени n0+u+T0. Для каждой из трех гипотез P-SyS принимаемый сигнал (после фиксированного интервала времени) коррелирует с известным сигналом. Корректная позиция - и тем самым также корректная позиция P-SyS - определяется посредством показателя самой сильной корреляции, т.е. наибольшего выходного сигнала из согласованного фильтра. Чтобы этот способ работал, должен существовать известный сигнал с фиксированной временной привязкой к P-SyS или эквивалентный сигнал синхронизации.
Этап тестирования пика может включать в себя декодирование второго принятого сигнала на основе временной привязки синхронизации, предполагаемой в каждом из множества заранее определенных местоположений. В случае устройства для идентификации корректного пика на выходе согласованного фильтра указанный выше этап тестирования может быть осуществлен процессором устройства. Дополнительно, в случае машиночитаемого носителя, кодированного с помощью компьютерной программы, компьютерная программа может побуждать компьютер осуществлять указанный выше этап тестирования.
Еще один способ верифицировать то, какой пик является корректным, состоит в том, чтобы тестировать каждую временную привязку P-SyS с помощью дифференциального коррелятора. В Е-UTRAN и других системах связи каждый OFDMA-символ содержит циклический префикс. Дифференциальный коррелятор, который имеет запаздывание, равное длине OFDMA-символа, и который имеет время интегрирования, равное длине циклического префикса, генерирует выходной сигнал, который имеет максимум, который возникает в конце циклического префикса. Таким образом, для каждой из гипотез временной привязки P-SyS, выход дифференциального коррелятора тестируется, и выбирается гипотеза временной привязки, приводящая к наибольшему выходному сигналу дифференциального коррелятора. Дифференциальные корреляторы - это устройства, которые известны в данной области техники, например патенты (США) номер 4964138 авторов Nease и др. и номер 4 800518 автора Miller, и множество дифференциальных корреляторов может использоваться.
Фиг.11 является блок-схемой примерной структуры части приемника, которая включает в себя согласованный фильтр MF, пиковый детектор, дифференциальный коррелятор, тестер выборок и устройство определения максимума, как описано выше. Для каждой гипотезы временной привязки P-SyS выходной сигнал дифференциального коррелятора, согласованный с циклическим префиксом, тестируется посредством тестера выборок. Корректная временная привязка P-SyS соответствует той позиции, где выходной сигнал дифференциального коррелятора максимальный. Тестер выборок выбирает три позиции (из выходного сигнала дифференциального коррелятора), определенные посредством пикового детектора. Таким образом, тестер выборок, пиковый детектор и устройство определения максимума выполнены с возможностью определять позицию, где выходной сигнал дифференциального коррелятора является максимальным. Чтобы улучшать производительность, выходной сигнал дифференциального коррелятора может сглаживаться, к примеру, посредством усреднения по нескольким OFDMA-символам с помощью надлежащего фильтра или другого модуля усреднения, включенного в тестер выборок. Использование этого способа не требует полного знания фактического передаваемого сигнала, поскольку используется дифференциальный коррелятор, хотя следует принимать во внимание, что необходимо знать то, что это OFDM-символ с определенной длиной СР. Точные значения передаваемого сигнала (т.е. передаваемые точки созвездия) необязательно должны быть известны.
Вместо использования циклического префикса и дифференциального коррелятора, согласованного с ним, может использоваться другой сигнал с повторением во временной области. Одна такая возможность - это опорный сигнал, описанный выше. В E-UTRAN опорные сигналы передаются по каждой шестой поднесущей, приводя к сигналу, который повторяет себя шесть раз в рамках OFDMA-символа. В настоящий момент считается, что достаточно того, что сигнал повторяет себя, и таким образом запаздывание, а также период интегрирования дифференциального коррелятора равны длине фундаментального периода сигнала, к примеру 1/6 периода OFDMA-символа.
По сравнению со структурой приемника, проиллюстрированной на фиг.5, компоновки, описанные выше в связи с фиг.9 и 11, имеют только один согласованный фильтр вместе с некоторыми схемами верификации. Как пояснено выше, такие схемы верификации могут быть либо коррелятором, который работает только по очень ограничиваемому отрезку времени, либо дифференциальным коррелятором. Так или иначе, схемы верификации требуют только операций с низкой сложностью, уменьшая требуемую площадь микросхемы для функций синхронизации приемника, а также энергопотребление таких схем синхронизации.
Фиг.12, 13 и 14 являются графиками вероятности детектирования P-SyS в сравнении с индексом ZC-последовательности, которые сравнивают производительность способов детектирования, описанных выше, с производительностью традиционного одного согласованного фильтра. На чертежах сдвиг частоты произвольно распределяется равномерно в диапазоне плюс или минус ширина полосы частот поднесущей для уровней SNR в -8 дБ, -4 дБ и 0 дБ, соответственно. Явное увеличение производительности может наблюдаться по всему диапазону SNR.
Следует принимать во внимание, что процедуры, описанные выше, выполняются многократно по мере необходимости, например, чтобы реагировать на изменяющийся во времени характер каналов связи между передатчиками и приемниками. Чтобы способствовать пониманию, многие аспекты этого изобретения описываются с точки зрения последовательности действий, которые могут выполняться, например, посредством надлежащим образом сконфигурированных элементов программируемой компьютерной системы. Также следует признавать, что различные действия могут выполняться посредством надлежащим образом сконфигурированных специализированных схем (к примеру, дискретных логических вентилей, соединенных между собой таким образом, чтобы выполнять специализированные функции, или специализированных интегральных схем), программных инструкций, выполняемых посредством одного или более процессоров, либо посредством комбинации вышеозначенного.
Кроме того, это изобретение дополнительно может рассматриваться как осуществленное полностью в любой форме машиночитаемого носителя хранения данных, сохраняющего соответствующий набор инструкций для использования в или связанных с системой, аппаратом или устройством выполнения инструкций, таким как компьютерная система, процессорная система или другая система, которая может извлекать инструкции из носителя и выполнять эти инструкции. При использовании в данном документе "машиночитаемый носитель" может быть любым средством, которое может содержать, сохранять, передавать, распространять или транспортировать программу для использования посредством или связанную с системой, аппаратом или устройством выполнения инструкций. Машиночитаемый носитель может быть, например, но не только, электронной, магнитной, оптической, электромагнитной, инфракрасной или полупроводниковой системой, аппаратом, устройством или средой распространения. Более специфические примеры (неполный список) машиночитаемых носителей включают в себя электрическое соединение, имеющее один или более проводов, переносную компьютерную дискету, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), стираемое программируемое ПЗУ (EPROM или флеш-память) и оптоволокно.
Таким образом, изобретение может быть осуществлено во многих различных формах, не все из которых описаны выше, и все эти формы рассматриваются как находящиеся в рамках объема изобретения. Для каждого из различных аспектов изобретения любая такая форма может упоминаться как "логика, выполненная с возможностью" осуществлять описанное действие, или альтернативно, как "логика, которая" выполняет описанное действие.
Следует подчеркнуть, что термины "содержит" и "содержащий" при использовании в данной заявке указывают наличие изложенных признаков, целых частей, этапов или компонентов и не исключают наличие или добавление одного или более других признаков, целых частей, этапов, компонентов или их групп.
Определенные варианты осуществления, описанные выше, являются просто иллюстративными и не должны рассматриваться ограничивающими в каком-либо смысле. Объем изобретения определяется посредством прилагаемой формулы изобретения, и все изменения и эквиваленты, которые находятся в пределах диапазона формулы изобретения, имеют намерение быть охваченными ей.

Изобретение относится к системе сотовой беспроводной связи и предназначено для повышения точности синхронизации. Изобретение раскрывает способы и устройства для идентификации корректных пиков в выходных сигналах согласованных фильтров в пользовательском оборудовании для систем связи. Принимаемый сигнал коррелируют с копией сигнала синхронизации, тем самым формируя выходной сигнал корреляции. Пики детектируют в выходном сигнале корреляции. Пик тестируется во множестве заранее определенных местоположений, которые основаны на свойствах сигнала синхронизации, тем самым формируя множество сигналов тестирования сигналов пиков. Максимум тестовых сигналов пиков определяется. 3 н. и 19 з.п. ф-лы, 18 ил.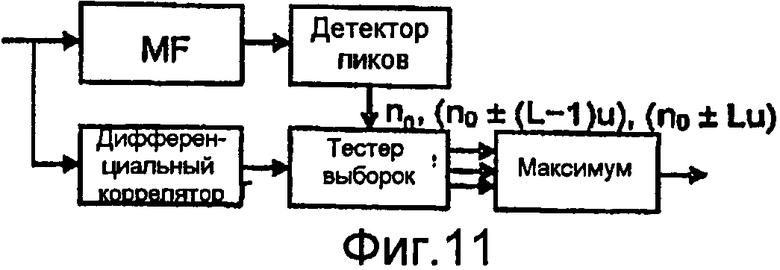
1. Способ идентификации корректного пика на выходе согласованного фильтра в пользовательском оборудовании для системы связи, содержащий этапы, на которых:
- коррелируют принимаемый мультиплексированный сигнал с ортогональным частотным разделением с копией сигнала синхронизации, тем самым формируя выходной сигнал корреляции;
- детектируют пики в выходном сигнале корреляции;
- тестируют пики во множестве заранее определенных местоположений, которые основаны на свойствах сигнала синхронизации, тем самым формируя множество сигналов тестирования пиков; и
- определяют максимум сигналов тестирования пиков.
2. Способ по п.1, в котором сигналом синхронизации является последовательность Задова-Чу, а заранее определенными местоположениями являются n0, n0±ul по модулю N и n0±u(l-1) по модулю N, где n0 указывает местоположение корректного пика; u - это индекс последовательности Задова-Чу; L - это положительное целое число, которое является наименьшим кратным ширины полосы частот поднесущей df, которая превышает амплитуду |fos| сдвига fos частоты пользовательского оборудования относительно принимаемого сигнала; l=1, 2, …, L; и (L-1)df≤|fos|≤Ldf.
3. Способ по п.1, в котором сигналом синхронизации является последовательность Задова-Чу, а заранее определенными местоположениями являются n0 и n0±u, где n0 указывает местоположение корректного пика; u - это индекс последовательности Задова-Чу; и амплитуда сдвига частоты пользовательского оборудования относительно принимаемого сигнала меньше или равна ширине полосы частот поднесущей.
4. Способ по п.1, в котором этап тестирования пика включает в себя декодирование второго принятого сигнала на основе временной привязки синхронизации, предполагаемой в каждом из множества заранее определенных местоположений.
5. Способ по п.1, в котором этап тестирования включает в себя этап, на котором коррелируют принимаемый сигнал с ожидаемым сигналом, который имеет известную позицию относительно сигнала синхронизации.
6. Способ по п.5, в котором корреляцию принимаемого сигнала с ожидаемым сигналом выполняют по заранее определенным местоположениям.
7. Способ по п.1, в котором этап тестирования пика включает в себя дифференциренциальную корреляцию принимаемого сигнала, тем самым формируя выходной сигнал дифференциальной корреляции.
8. Способ по п.7, в котором этап тестирования пика дополнительно включает в себя сглаживание выходного сигнала дифференциальной корреляции.
9. Способ по п.7, в котором принимаемый сигнал дифференциально коррелируют с циклическим префиксом, опорным сигналом или повторяющимся во временной области сигналом.
10. Устройство в приемнике для идентификации корректного пика на выходе согласованного фильтра, содержащее:
- согласованный фильтр, выполненный с возможностью коррелировать принимаемый мультиплексированный сигнал с ортогональным частотным разделением с копией сигнала синхронизации и тем самым формировать выходной сигнал корреляции;
- пиковый детектор, выполненный с возможностью детектировать пики в выходном сигнале корреляции; и
- процессор, выполненный с возможностью тестировать пики во множестве заранее определенных местоположений, которые основаны на свойствах сигнала синхронизации, и тем самым формировать множество сигналов тестирования пиков и определять максимум сигналов тестирования пиков.
11. Устройство по п.10, в котором сигналом синхронизации является последовательность Задова-Чу, а заранее определенными местоположениями являются n0, n0±ul по модулю N и n0±u(l-1) по модулю N, где n0 указывает местоположение корректного пика; u - это индекс последовательности Задова-Чу; L - это положительное целое число, которое является наименьшим кратным ширины полосы частот поднесущей df, которая превышает амплитуду |fos| сдвига fos частоты приемника относительно принимаемого сигнала; l=1, 2, …, L; и (L-1)df≤|fos|≤Ldf.
12. Устройство по п.10, в котором процессор выполнен с возможностью тестировать пики посредством декодирования второго принимаемого сигнала на основе временной привязки синхронизации, предполагаемой в каждом из множества заранее определенных местоположений.
13. Устройство по п.10, в котором процессор выполнен с возможностью тестировать пики посредством корреляции принимаемого сигнала с ожидаемым сигналом, который имеет известную позицию относительно сигнала синхронизации.
14. Устройство по п.13, в котором процессор выполнен с возможностью коррелировать принимаемый сигнал с ожидаемым сигналом по заранее определенным местоположениям.
15. Устройство по п.10, в котором процессор выполнен с возможностью тестировать пики посредством дифференциальной корреляции принимаемого сигнала, тем самым формируя выходной сигнал дифференциальной корреляции.
16. Устройство по п.15, в котором процессор дополнительно выполнен с возможностью тестировать пики посредством сглаживания выходного сигнала дифференциальной корреляции.
17. Устройство по п.15, в котором принимаемый сигнал дифференциально коррелирован с циклическим префиксом, опорным сигналом или повторяющимся во временной области сигналом.
18. Машиночитаемый носитель, кодированный с помощью компьютерной программы, которая, при исполнении компьютером, заставляет компьютер осуществлять способ идентификации корректного пика на выходе согласованного фильтра в пользовательском оборудовании для системы связи, при этом способ содержит этапы, на которых:
- коррелируют принимаемый мультиплексированный сигнал с ортогональным частотным разделением с копией сигнала синхронизации, тем самым формируя выходной сигнал корреляции;
- детектируют пики в выходном сигнале корреляции;
- тестируют пики во множестве заранее определенных местоположений, которые основаны на свойствах сигнала синхронизации, тем самым формируя множество сигналов тестирования пиков; и
- определяют максимум сигналов тестирования пиков.
19. Носитель по п.18, в котором сигналом синхронизации является последовательность Задова-Чу, а заранее определенными местоположениями являются n0, n0±ul по модулю N и n0±u(l-1) по модулю N, где n0 указывает местоположение корректного пика; u - это индекс последовательности Задова-Чу; L - это положительное целое число, которое является наименьшим кратным ширины полосы частот поднесущей df, которая превышает амплитуду |fos| сдвига fos частоты пользовательского оборудования относительно принимаемого сигнала; l=1, 2, …, L; H(L-1)df≤|fos|≤Ldf.
20. Носитель по п.18, в котором этап тестирования пика включает в себя этап, на котором декодируют второй принимаемый сигнал на основе временной привязки синхронизации, предполагаемой в каждом из множества заранее определенных местоположений.
21. Носитель по п.18, в котором этап тестирования включает в себя этап, на котором коррелируют принимаемый сигнал с ожидаемым сигналом, который имеет известную позицию относительно сигнала синхронизации.
22. Носитель по п.18, в котором этап тестирования пика включает в себя этап, на котором дифференциально коррелируют принимаемый сигнал, тем самым формируя выходной сигнал дифференциальной корреляции.
| СПОСОБ ОПРЕССОВКИ КОЛОННЫ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ НАГНЕТАТЕЛЬНОЙ СКВАЖИНЫ | 2007 |
|
RU2320868C1 |
| СПОСОБ ПОЛУЧЕНИЯ КЛЕТОЧНОЙ КУЛЬТУРЫ ХРУСТАЛИКА С ПРЕИМУЩЕСТВЕННЫМ СОДЕРЖАНИЕМ ЭПИТЕЛИАЛЬНЫХ КЛЕТОК | 2008 |
|
RU2396085C1 |
| US 7006587 B1, 28.02.2006 | |||
| RU 2003132515 A, 10.11.2003 | |||
| US 5594506 A, 14.01.1997 | |||
| US 2006050799 A1, 09.03.2006 | |||
| US 2001038667 A1, 08.11.2001. | |||

