Изобретение относится к медицине, а именно нейрохирургии, ультразвуковой диагностике, лучевой диагностике, и может быть использовано при проведении операций удаления патологических объектов малого размера и/или глубинно расположенных объектов (глубже 15 мм от коры головного мозга).
Известен способ безрамной ультразвуковой навигации с применением 3D ультразвукового изображения (Roth J. Real-time neuronavigation with high-quality 3D ultrasound SonoWand in pediatric neurosurgery / Roth J, Biyani N, Beni-Adani L, Constantini S // Pediatric Neurosurgery. - 2007. №43(3). P.185-191).
Для реализации способа используют рабочую станцию, создающую трехмерную виртуальную систему координат и поддерживающую при помощи специального дополнительного оборудования взаимосвязь с головой пациента, аппарата УЗИ, с возможностями получения 3D изображения.
Интраоперационно проводят ультразвуковое сканирование структур головного мозга, на основании которого рабочей станцией SonoWand создается трехмерная система координат. Проводят сопоставление виртуальной системы координат с головой пациента. Определяют положение новообразования по отношению к анатомическим структурам в операционной ране. При помощи специально маркированного оборудования производят планирование доступа к патологическому новообразованию в виртуальной системе координат. На основании полученного плана проводят введение специально маркированного инструмента в новообразование. При изменении взаимоположения анатомических структур и новообразования для обеспечения точности проведения контроля манипуляций необходимо создание новой виртуальной системы координат, затем вновь определяют положение новообразования по отношению к анатомическим структурам, соответственно произошедшим изменениям.
К недостаткам способа следует отнести:
- невозможность проведения контроля манипуляций в режиме реального времени;
- большие временные затраты на создание новой виртуальной системы координат для проведения контроля манипуляций;
- высокую стоимость используемого оборудования;
- необходимо наличие специально обученного персонала.
Наиболее близким к заявляемому является способ интраоперационной ультразвуковой навигации при внутримозговых новообразованиях (Комков Д.Ю. Интраоперационная ультразвуковая навигация объемных образований головного мозга: дис. канд. мед. наук / Д.Ю.Комков. - СПб, 2004. - 205 с.), принятый за прототип.
После проведения трепанации черепа проводят ориентировочное ультразвуковое сканирование структур головного мозга. Определяют положение новообразования в операционной ране по отношению к другим анатомическим структурам. Определяют расстояние до патологического образования из разных точек операционной раны. После вскрытия твердой мозговой оболочки определяют оптимальную зону проведения энцефалотомии. Определяют направление проведения доступа к новообразованию. В режиме реального времени, с использованием УЗИ изображения, визуализируют продвижение хирургического инструмента, находящегося в руке хирурга, через ткань мозга и попадание его в новообразование.
Недостатки прототипа:
- отсутствие точного расчета используемой траектории доступа к патологическому объекту;
- ориентировочное использование полученного направления доступа;
- удержание датчика и хирургического инструмента в разных руках.
Изобретение направлено на создание способа интраоперационной ультразвуковой навигации при внутримозговых новообразованиях, обеспечивающего определение точной траектории проведения энцефалотомии при проведении доступа к новообразованию.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном способе интраоперационной ультразвуковой навигации при внутримозговых образованиях, включающем определение положения новообразования по отношению к другим анатомическим структурам в операционной ране с использованием ультразвуковой эхолокации, определение направления проведения энцефалотомии и контроль манипуляций в режиме реального времени, особенность заключается в том, что предварительно с использованием специального биопсийного адаптера и режима сканирования «биопсия» проводят точное определение направления энцефалотомии из предполагаемой точки доступа до новообразования, с последующим введением специального направляющего хирургического инструмента в виде металлического стержня с закругленными концами с обеих сторон до новообразования по заданной траектории и контролем продвижения хирургического инструмента по заданной траектории.
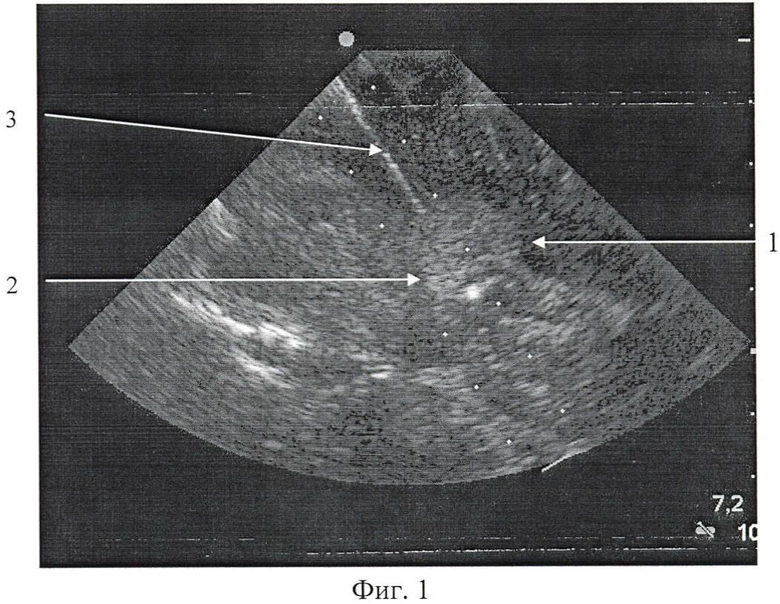
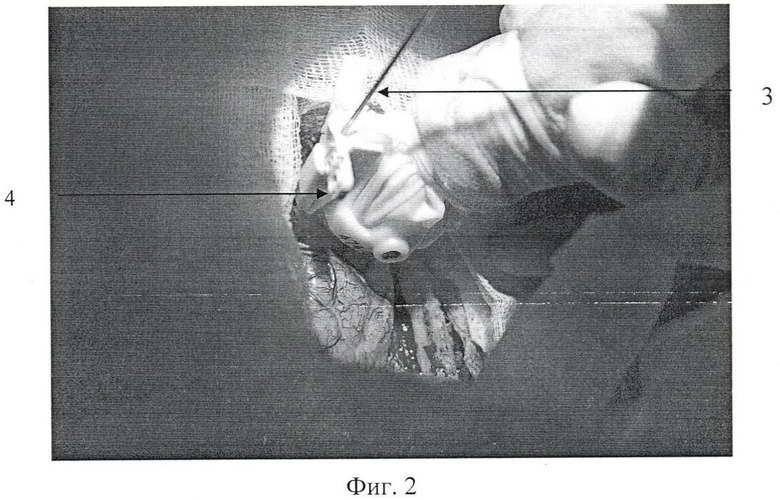
Сущность изобретения поясняется чертежами, где на фиг.1 представлено ультразвуковое изображение введенного в новообразование специального направляющего хирургического инструмента, на которой представлены: новообразование 1, отображенная на экране УЗИ сканера заданная биопсийным адаптером траектория доступа 2, изображенного направляющего хирургического инструмента 3, погруженного в новообразование. На фиг.2 представлен специальный направляющий хирургический инструмент 3, установленный в направляющую биопсийного адаптера 4.
Способ осуществляется следующим образом.
Проводят ориентировочное ультразвуковое сканирование после трепанации черепа через твердую мозговую оболочку в двух взаимно перпендикулярных плоскостях из разных точек. Определяют положение новообразования в операционной ране по отношению к другим анатомическим структурам. Определяют расстояние до патологического образования из разных точек операционной раны. После вскрытия твердой мозговой оболочки определяют место проведения энцефалотомии.
На используемый ультразвуковой датчик устанавливают биопсийный адаптер. Проводят эхолокацию с использованием специального режима сканирования, который, например, в ультразвуковом сканере Sonosite Micromaxx называется «Биопсия». Проводят сопоставление плоскости сканирования и угла наклона датчика таким образом, чтобы задаваемая биопсийным адаптером и отображаемая на экране монитора заданная траектория включала в себя запланированную для проведения энцефалотомии точку на поверхности мозга и точку на новообразовании. Проводят оценку анатомических структур, находящихся на траектории доступа. В направляющую биопсийного адаптера устанавливают специальный направляющий хирургический инструмент. По заданной траектории проводят введение направляющего хирургического инструмента в новообразование. Его продвижение по заданной траектории до новообразования проводят под контролем УЗИ изображения в режиме реального времени. Затем датчик с биопсийным адаптером снимают, а по введенному специальному направляющему хирургическому инструменту проводят энцефалотомию с минимальной травматизацией интактной ткани мозга.
Направляющий хирургический инструмент представляет собой металлический стержень с закругленными концами с обеих сторон, устойчивый к деформации, изготовленный из металла, который можно стерилизовать стандартными способами, например, хирургическая сталь. Диаметр направляющего инструмента обусловлен техническими характеристиками, заданными производителем биопсийного адаптера. Минимальная длина инструмента обусловлена техническими характеристиками, заданными производителями биопсийного адаптера и программного обеспечения используемого ультразвукового аппарата. Максимальная длина направляющего инструмента не ограничена и выбирается исходя из удобства его использования хирургом. Средний размер инструмента около 10-12 см.
Заявляемый способ разработан в ФГУ РНХИ им. проф. А.Л.Поленова и прошел клинические испытания при 7 операциях по удалению кавернозных мальформаций и глубинно расположенных опухолей глиального ряда. При поступлении состояние всех больных компенсированное. Клиническая картина представлена эпилептическим и/или гипертензионным синдромом. Очаговые неврологические выпадения минимальны. Во всех случаях при проведении оперативного вмешательства с использованием заявляемого способа проведено точное погружение направляющего хирургического инструмента в патологический объект с первой попытки. Для удаления новообразования проведена минимальная энцефалотомия. В раннем послеоперационном периоде нарастание очаговой симптоматики, соответственно месту оперативного вмешательства не было.
Приводим пример - выписку из истории болезни.
Больной С., 14 лет, И.Б.2433-10. Диагноз: Фибриллярная астроцитома правой височной доли. Симптоматическая эпилепсия.
При поступлении жалобы на наличие частых эпилептических припадков.
Из анамнеза известно, что припадки беспокоят с 3 летнего возраста. Противосудорожная терапия без должного эффекта.
Клиническая картина представлена эпилептическим синдромом. Очаговая неврологическая симптоматика минимальна, представлена легкой левосторонней пирамидной симптоматикой.
На МРТ от 15.09.10 определяется объемное образование, в проекции глубоких отделов средней части правой височной доли определяется опухоль кистозно-солидного строения 45×26×29 мм. Опухоль глиального ряда.
21.09.10 проведено оперативное вмешательство - костно-пластическая трепанация черепа в правой лобно-височной области, микрохирургическое удаление опухоли под УЗИ навигацией и электрофизиологическим контролем.
После проведения костно-пластической трепанации черепа в правой лобно-височной области проведена эхолокация. Выявлено патологическое образование, неоднородной эхоструктуры, представленной гиперэхогенным, однородной эхогенности фрагментом в передней части, с резкогиперэхогенным участком с акустической тенью (с признаками кальцификации) в задней части и кистозным компонентом. Новообразование неправильной формы, с ровными краями и четкими контурами. Передние отделы прилежат к костным структурам медиобазальных отделов средней черепной ямки, задние отделы - к намету мозжечка. Размеры новообразования 26×35×28 мм. Латеральные отделы новообразования располагались на глубине 15 мм от точки локации на ТМО. В режиме ЦДК выявлено наличие ветви задней мозговой артерии, прилежащие к опухоли. Патологических сосудистых образований не выявлено.
ТМО вскрыта Т-образным разрезом. При электрокортикографии выявлен очаг патологической активности в проекции средней и задней третей средней и нижней височных извилин. В проекции зоны эпилептического очага определена точка проведения энцефалотомии. Использован биопсийный адаптер на датчик Р10/8-4 и режим эхолокации «биопсия». Проведена эхолокация, при которой определена траектория погружения специального направляющего хирургического инструмента в новообразование. В точку для проведения энцефалотомии на коре полушария большого мозга с использованием биопсийного адаптера установлен специальный направляющий хирургический инструмент, представляющий собой стержень из хирургической стали с закругленными концами с обеих сторон длиной 10 см. При проведении непрерывного УЗИ мониторинга в режиме реального времени проведен контроль продвижения специального направляющего хирургического инструмента по заранее заданной траектории до новообразования. Кортикотомия по инструменту до новообразования.
Обнаружена опухолевая ткань серо-розового цвета, мягко-эластической консистенции, с кистой. Опухоль удалена субтотально. Электрокортикографический контроль - сохраняются очаги эпилептиформной активности. Выполнена субпиальная резекция очагов эпиактивности.
В послеоперационном периоде припадков у больной не отмечено. Отмечалась нейропатия правого VII нерва. Двигательных, чувствительных и речевых выпадений нет.
При контрольной МРТ от 24.09.10 определяются послеоперационные изменения в правой височной доле. Зон накопления контрастного вещества нет.
Больной выписан на амбулаторное лечение в удовлетворительном состоянии.
Использование заявленного способа позволяет обеспечить точный расчет энцефалотомии с минимальной травмой интактной ткани мозга и провести оперативное вмешательство с соблюдением принципа минимальной инвазивности в нейрохирургии.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ удаления бластоматозного образования медиобазальных отделов височной доли и/или таламуса | 2018 |
|
RU2687021C1 |
| СПОСОБ ИНТРАОПЕРАЦИОННОЙ НАВИГАЦИИ ПРИ ВНУТРИМОЗГОВЫХ НОВООБРАЗОВАНИЯХ | 2015 |
|
RU2598767C1 |
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ГЛИАЛЬНЫХ НОВООБРАЗОВАНИЙ ГОЛОВНОГО МОЗГА | 2008 |
|
RU2388415C2 |
| Комбинированная интраоперационная навигационная система с использованием генерации ультразвуковых изображений методом трассировки лучей | 2022 |
|
RU2816071C1 |
| Робот-ассистированный комплекс минимально инвазивной абдоминальной хирургии для автоматизированного выполнения операций методами локальной деструкции новообразований печени | 2023 |
|
RU2841089C1 |
| Способ подготовки и выполнения хирургической операции на органах малого таза | 2020 |
|
RU2736800C1 |
| СПОСОБ МАЛОИНВАЗИВНОГО УДАЛЕНИЯ ИНОРОДНЫХ ТЕЛ ИЗ ВЕЩЕСТВА ГОЛОВНОГО МОЗГА С ИСПОЛЬЗОВАНИЕМ НЕЙРОНАВИГАЦИИ И НАПРАВИТЕЛЯ | 2023 |
|
RU2814763C1 |
| Способ проекционной разметки хирургического доступа в нейрохирургии | 2022 |
|
RU2792552C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ИНСТРУМЕНТА В ХИРУРГИИ ПОЗВОНОЧНИКА НА ОТКРЫТОЙ РАНЕ | 2019 |
|
RU2726473C1 |
| СПОСОБ МАРКИРОВКИ ГОЛОВЫ ПАЦИЕНТА ПРИ РАБОТЕ С ИНТРАОПЕРАЦИОННОЙ БЕЗРАМНОЙ НЕЙРОНАВИГАЦИЕЙ | 2015 |
|
RU2607404C2 |
Изобретение относится к медицине, а именно нейрохирургии, ультразвуковой диагностике. Определяют положение новообразования по отношению к другим анатомическим структурам в операционной ране и направление проведения энцефалотомии. Для этого используют ультразвуковой сканер Sonosite Micromaxx, на датчик которого устанавливают биопсийный адаптер. Проводят эхолокацию из разных точек операционной раны в режиме сканирования «биопсия». Сопоставляют плоскость сканирования и угол наклона датчика таким образом, чтобы траектория включала в себя оптимальную точку для энцефалотомии на поверхности мозга и точку на новообразовании. В направляющую бипсийного адаптера устанавливают хирургический инструмент, представляющий собой металлический стержень с закругленными концами с обеих сторон, и продвигают его до новообразования по найденной траектории под контролем УЗИ изображения. Способ позволяет снизить травматичность операции, что достигается за счет определения оптимальной траектории энцефалотомии. 2 ил., 1 пр.
Способ интраоперационной ультразвуковой навигации при внутримозговых образованиях, включающий определение положения новообразования по отношению к другим анатомическим структурам в операционной ране с использованием ультразвуковой эхолокации, определение направления проведения энцефалотомии и контроль манипуляций в режиме реального времени, отличающийся тем, что используют ультразвуковой сканер Sonosite Micromaxx, на датчик которого устанавливают биопсийный адаптер, проводят эхолокацию из разных точек операционной раны в режиме сканирования «биопсия», сопоставляют плоскость сканирования и угол наклона датчика таким образом, чтобы траектория включала в себя оптимальную точку для энцефалотомии на поверхности мозга и точку на новообразовании; в направляющую бипсийного адаптера устанавливают хирургический инструмент, представляющий собой металлический стержень с закругленными концами с обеих сторон, и продвигают его до новообразования по найденной траектории под контролем УЗИ изображения.
| КОМКОВ Д.Ю | |||
| Интраоперационная ультразвуковая навигация объемных образований головного мозга: Автореф | |||
| дисс., СПб., 2004, с.8-23 | |||
| НЕЙРОНАВИГАЦИОННАЯ ЭНДОСКОПИЧЕСКАЯ СИСТЕМА | 2004 |
|
RU2290055C2 |
| US 20100063523 A1, 11.03.2010 | |||
| ИВАНОВА Н.Е | |||
| и др | |||
| Клинико-диагностические критерии кавернозных мальформаций головного мозга и результаты с применением ультразвуковой навигации | |||
| Журнал неврологии | |||

