Изобретение относится к медицине, а именно к оперативной гинекологии, и может быть использовано при выполнении операций в области абдоминальной хирургии и онкологии.
На стыке клинических специальностей и цифровых, информационных технологий разработаны и известны: моделирование хирургических вмешательств и навигационная хирургия, современные медицинские изображения, а также их обработка, компьютер-ассистированная диагностика, медицинское моделирование и электронное обучение, хирургическая навигация и робототехника, персонализированная медицина (А.А. Litvin, V.A. Kovalev, V.A. Litvin. International congress «Computer assisted radiology and surgery» (June 27-30, 2012, Pisa, Italy) Novosti Khirurgii. 2012; Vol 20 (5): 132-136).
В перечисленных технологиях недостаточно раскрыты и изучены методы построения и анализа медицинских изображений при проведении органосохраняющих хирургических вмешательств.
Из уровня техники также известен способ подготовки и выполнения хирургической операции с использованием дополненной реальности, включающий этапы планирования хирургической операции, хирургической навигации и хирургического вмешательства с использованием дополненной реальности, причем на этапе планирования хирургической операции пациенту проводят компьютерную или магнитно-резонансную томографию и формируют трехмерное растровое изображение индивидуальной анатомии пациента, которое передают на компьютер комплекса оборудования для осуществления хирургической операции с использованием дополненной реальности, отличающийся тем, что на этапе хирургической навигации выполняют построение контура и трехмерную реконструкцию всех анатомических структур, представляющих интерес для хирурга в предстоящей операции, путем установки трех ключевых точек на анатомических ориентирах, видимых на экране компьютера в виде трехмерной модели и также видимых или осязаемых на теле пациента, причем точки выбирают с возможностью образования ими треугольника, после чего выбирают траекторию и безопасные пределы хирургического доступа, определяют матрицу трансформации координат между системой координат стереокамеры комплекса и системой координат томографа, в котором пациент проходил диагностику, посредством установки кончиком навигационной указки комплекса на теле пациента тех же трех точек и в той же последовательности, что и на анатомической модели, и фиксации компьютером комплекса позиции точек, после установки трех ключевых точек, при необходимости устанавливают дополнительные точки, находящиеся на той же анатомической поверхности, после чего запускают процесс регистрации точек с точками на поверхности трехмерных моделей анатомии пациента, при этом на экране компьютера дополнительно отображают трехмерную модель навигационной указки, при этом положение и ориентация трехмерной модели навигационной указки относительно моделей анатомии пациента соответствует физическому положению указки относительно анатомической поверхности пациента, на этапе хирургического вмешательства используют навигационную указку для поиска интересующих анатомических структур, точки доступа к ним, направления их расположения относительно точки доступа, расстояния до них, а также для ограничения области хирургического доступа, при этом ориентируясь на изображение на экране компьютера или в очках дополненной реальности, в область хирургического доступа устанавливают навигационную указку таким образом, чтобы интересующая анатомическая структура находилась на линии продолжения указки, при этом на экране отображается расстояние до анатомической структуры в миллиметрах, а для ограничения области хирургического доступа, ориентируясь на изображение на экране компьютера или в очках дополненной реальности, перемещают навигационную указку таким образом, чтобы линия продолжения указки двигалась вдоль контура интересующей анатомической структуры, указку двигают по линии проекции интересующей анатомической структуры на поверхности тела и очерчивают область предстоящего хирургического доступа, после чего выполняют хирургическую операцию, в ходе которой при необходимости устанавливают новую точку доступа и корректируют область доступа (RU 2707369 C1, 26.11.2019). Данный метод может быть предложен в качестве ближайшего аналога.
Недостатком известного способа является отсутствие возможности работы с определенным органом независимо от реперных точек ориентированных по телу человека. Отсутствие динамического наложения предоперационной модели на интраоперационную модель выведенную на мониторы видеоэндоскопического комплекса для лапароскопических органосохраняющих вмешательств.
Техническим результатом предложенного решения является возможность удаления новообразований органов малого таза с минимальной травмой здоровой ткани органа, не требующей или требующей минимального применения методик коагуляции для остановки кровотечения. При операциях на яичниках техническим результатом также является сохранение здоровой ткани яичника и овариального резерва.
Технический результат достигается благодаря тому, что способ подготовки и выполнения органосохраняющей хирургической операции на органах малого таза с применением программно-аппаратного комплекса в составе медицинского оборудования, вычислительного оборудования и систем управления ими и специального программного обеспечения, включает этапы создания предоперационной персонифицированной трехмерной математической и графической модели (модель 1) органов и новообразований в них, планирования - симуляции органосохраняющей хирургической операции, хирургического вмешательства с импортом предоперационной трехмерной модели создавая интраоперационную модель (модель 2), в процессе оперативного вмешательства интраоперационная модель адаптируется к изменениям размеров органов и их топографии в реальном времени, причем на этапе планирования органосохраняющей хирургической операции пациенту проводят ультразвуковое исследование (УЗИ) или компьютерную (КТ) или магнитно-резонансную (МРТ) томографию и формируют предоперационную трехмерную математическую и графическую модель органов и новообразований в них, и план операции с хирургической навигацией, далее предоперационная модель во время хирургического вмешательства адаптируется на интраоперационные параметры органов и новообразований и формируется интраоперационная модель с хирургической навигацией, отличающийся тем, что на этапе построения предоперационной персонифицированной трехмерной математической и графической модели органов и новообразований в них, проводится моделирование новообразований в органах, имеющее интерес для хирурга в планируемой операции, благодаря чему возможно определить степень внедрения опухоли в здоровую ткань органа, границы новообразования относительно здоровой ткани органа, визуализировать подтканевые структуры, локализацию сосудистой сети вокруг новообразований, провести количественную и качественную оценку кровотоков вокруг новообразований, определить расположение органа с новообразованием относительно других органов в малом тазу, затем формируется предварительный план операции с обозначением навигационных меток для проведения разреза и удаления новообразования с минимальной травмой здоровой ткани органа, после чего проводится органосохраняющее лапароскопическое вмешательство, которое начинается с оценки топографии и размеров органов и новообразований в них и адаптации предоперационной трехмерной модели на интраоперационные параметры органов и новообразований, после которой с использованием программно-аппаратного комплекса на мониторах видеоэндоскопического комплекса предоставляется возможность оценить объемно новообразование в органе в режиме диалога, с визуализацией невидимых подтканевых структур и сосудов, после чего на адаптированной трехмерной модели появляются метки навигации, с помощью которых позиционируется место проведения разреза, после чего выполняют удаление новообразования из органа, в процессе оперативного вмешательства при пространственном смещении органов или изменении их геометрии вследствие удаления новообразований, повторная привязка модели происходит автоматически через фиксированные моменты времени, или с помощью системы управления компьютером вручную.
Краткое описание фигур и чертежей.
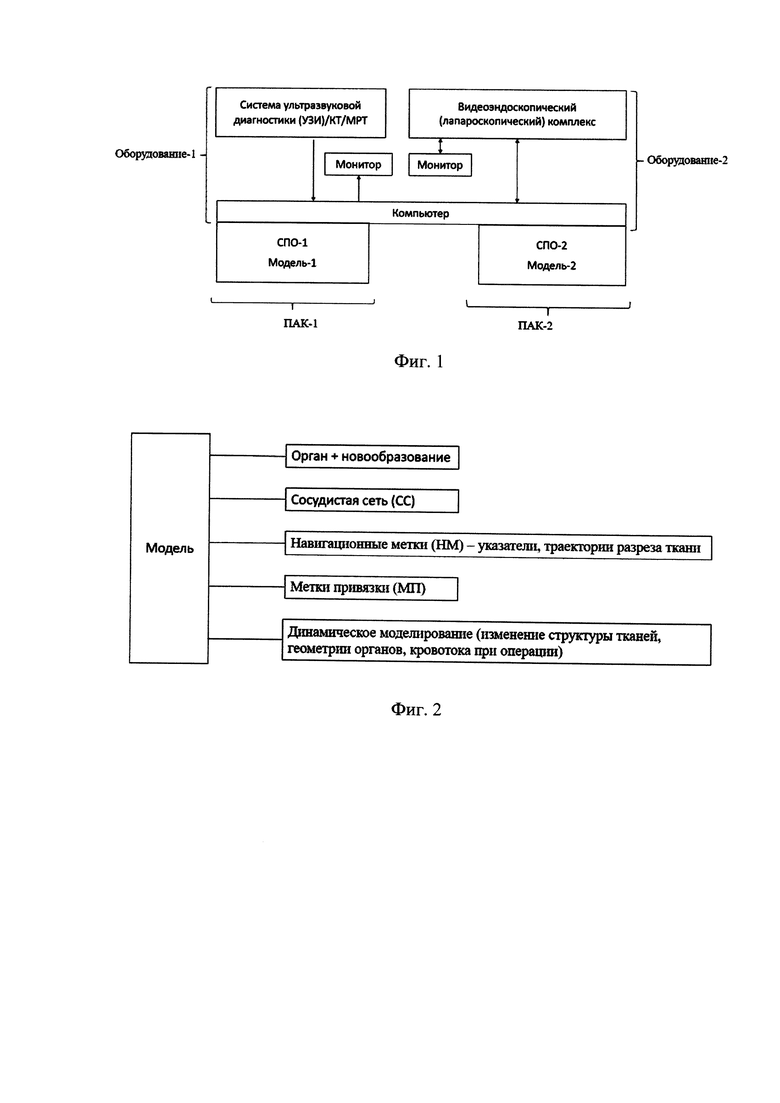
Фиг. 1 Принципиальная схема программно-аналитического комплекса для моделирования и хирургической навигации при лапароскопии.
Фиг. 2. Принципиальная схема математической модели.
Возможность осуществления предложенного способа поясняется следующим примером.
Для планирования оперативного вмешательства и интраоперационной хирургической навигации предложен программно-аналитический комплекс (ПАК) в составе медицинского оборудования, вычислительного оборудования и систем управления ими (Оборудование) и специального программного обеспечения (СПО). Комплекс состоит из двух взаимосвязанных частей (ПАК-1 и ПАК-2, см. Фиг. 1): ПАК-1=Оборудование-1+СПО-1, ПАК-2=Оборудование-2+СПО-2.
ПАК-1 позволяет создавать персонифицированную трехмерную математическую и графическую модель органов и новообразований в них и поэтапный план операции до ее фактического проведения (Модель-1), т.е. проводить предварительную симуляцию операции. ПАК-2 импортирует Модель-1 на интраоперационном этапе (создавая Модель-2), в процессе оперативного вмешательства адаптирует Модель-2 к изменениям органов в реальном времени, и накладывает Модель-2 на видеоизображение на экране видеоэндоскопического комплекса или на дополнительных мониторах, осуществляя хирургическую интраоперационную видеонавигацию. Использование во время операции готовой персонифицированной модели позволяет получить наложение изображений за приемлемое время без высоких требований к производительности оборудования.
Первая часть предлагаемого ПАК (ПАК-1, см. Фиг. 1) состоит из системы УЗИ или КТ или МРТ, компьютера, монитора, систем управления ими (Оборудование-1) и специального программного обеспечения (СПО-1). Системы управления включают в себя: клавиатуру, стилус, мышь, графический планшет. Основная задача первой части - моделирование новообразований, локализованных в органах, и планирование этапов оперативного вмешательства. Для этого с помощью СПО-1 создается пациент-специфическая персонифицированная трехмерная математическая и графическая модель органов и новообразований, на которых планируется операция (Модель-1). Разработка Модели-1 проводится на основе данных УЗИ или КТ или МРТ, которые представлены в формате DICOM (стандарт DICOM - медицинский отраслевой стандарт, регламентирующий создание, хранение, передачу и визуализацию цифровых медицинских изображений и метаданных, [https://www.dicomstandard.org/about/]) или в других стандартах. Преобразование изображения из медицинского отраслевого формата DICOM (или других медицинских форматов [Гогина, О.А. Основные стандарты и модели интеграции медицинских информационных систем / О.А. Гогина. - Текст: непосредственный // Молодой ученый. - 2017. - №18 (152). - С. 8-11. - URL: https://moluch.ru/archive/152/43122/ (дата обращения: 11.06.2020)]) в Модель-1 производится с помощью методов анализа и распознавания изображений, в том числе нейросетевых методов.
Для снижения степени травматичности оперативного вмешательства при создании Модели-1 применяются параметры оценки кровотока в органах вокруг новообразований. Поэтому, необходимым элементом Модели-1 является трехмерная математическая и графическая подмодель сосудистой сети, с оценкой кровотока в ней, вокруг и внутри рассматриваемых органов и вокруг новообразований в рассматриваемом органе, см. Фиг. 2. При 2D УЗ изображении оценивается размер, УЗ показатели структуры новообразования, локализация сосудов вокруг новообразования и по возможности их диаметр. При 3D УЗ изображении дополнительно оцениваются по внешний и по возможности внутренний диаметры сосудов, а также линейная и объемная скорости кровотока в них, эти параметры учитываются при построении Модели-1. При использовании 3D УЗИ модель сосудистой сети строится на основании качественных и количественных параметров кровотока: VI (индекс объемной васкуляризации), FI (объемный индекс потока) и VFI (интегральный перфузионный показатель). При 3D ультразвуковом сканировании матки и яичников для определения сосудистого кровотока, с помощью экспертных УЗ приборов с использованием трансабдоминального и трансвагинального датчиков 3,5 и 9,0 МГц проводят 3D сканирование сначала в серошкальном представлении, применяя технологию VCI модуль объемной визуализации с контрастированием, затем технологию HD-Flow и получают четкую прорисовку сосудов как в режиме серошкального представления, так и в режиме GlassBody 3D - реконструкцию изображения сосудов в режиме цветового допплеровского, после чего оценивают сосудистую архитектонику зоны интереса. Первым этапом исследования органов малого таза (матки и придатков) проводят 2D ультразвуковое исследование. При эхографии проводят серию продольных, поперечных и косых сканирований в режиме реального времени. Зону интереса подвергают детальному исследованию по оценке васкуляризации методом HD-Flow (высокочувствительная двунаправленная допплерография для исследования кровотока). Вторым этапом исследования проводят 3D сканирование сначала в серошкальном представлении, применятся технология VCI (модуль объемной визуализации с контрастированием, опция OmniView), что повышает контрастное разрешение и улучшает визуализацию области интереса в любой плоскости сечения, даже при исследовании структур неправильной формы. Модель кровеносной сети накладывается на модель соответствующих органов и новообразований. В результате получается управляемая персонифицированная 3D модель органов с новообразованиями и показателями кровотока (Модель-1, см. Фиг. 2).
Вторая часть предлагаемого ПАК (ПАК-2, см. Фиг. 1) состоит из видеоэндоскопического комплекса для лапароскопических вмешательств, компьютера, необходимого количества мониторов для комфортного визуального проведения операции, систем управления (Оборудование-2) и специального программного обеспечения (СПО-2). Системы управления включают в себя: клавиатуру, графический планшет, стилус, педаль, мышь, лапароскопический инструментарий, позволяющий выполнить функции указки. СПО-2 способна анализировать потоковое видеоизображение, передающееся с видеоэндоскопического комплекса на компьютер и монитор, с помощью методов анализа и распознавания изображений, в том числе нейросетевых методов. На интраоперационном этапе ПАК-2 импортирует Модель-1, созданную ПАК-1, создавая Модель-2 и адаптируя ее на интраоперационные параметры органов и новообразований в них. Во время проведения органосохраняющего лапароскопического вмешательства СПО-2 адаптирует Модель-2 к изменениям органов в процессе удаления новообразований, накладывает Модель-2 на видеоизображение на экране видеоэндоскопического комплекса (или на дополнительном мониторе - по выбору пользователя), демонстрируя хирургу подтканевые структуры и сосуды для проведения разрезов и удаления новообразований по заранее созданному в Модели-1 плану операции.
Использование предлагаемого ПАК осуществляется следующим образом. На предоперационном этапе пациенту проводится диагностика: УЗИ или КТ или МРТ. Ставятся реперы, или метки сегментации (МС), отмечающие контуры и размеры органов и новообразований. В результате исследования Оборудование-1 формирует файлы, содержащие геометрические параметры, необходимые для построения Модели-1: размеры органов и новообразований в серии продольных, поперечных и косых сечений; наборы МС в сечениях; данные по локализации сосудов; количественные и качественные параметры кровотока в сосудистой сети вокруг новообразований. Файлы данных представляют трехмерное изображение в медицинском отраслевом формате DICOM, либо подобные изображения в других форматах. Набор файлов передается на компьютер с установленным СПО-1 для формирования Модели-1 (см. Фиг. 1). СПО-1 имеет возможность формировать 3D Модель-1 также и в случае представления 2D изображений УЗ исследований на предоперационном этапе.
Разработка трехмерной математической и графической Модели-1 проводится автоматически с возможностью ручного управления и контроля пользователем промежуточных и итоговых результатов. Ручное управление заключается в возможности уточнения модели (изменение контуров органов и новообразований и показателей кровотоков) в получаемой Модели-1. Изменение данных модели включает изменение сетки и графов, представляющих органы с локализованными в них новообразованиями и сосудистой сетью.
Следующим этапом построения Модели-1 является моделирование операционного разреза (рассечения) на органе, что делается посредством установления указателей - меток навигации (МН). Предусмотрено моделирование нескольких вариантов разрезов посредством создания отдельных наборов МН, что позволяет сравнивать различный ход операции при ее планировании.
Построение Модели-1 завершается постановкой меток привязки (МП), с помощью которых будет осуществляться наложение модели на видеоизображение органов во время хирургического вмешательства. МП могут представлять собой системы точек, линий и контуров на видимых поверхностях органов и/или новообразований, с возможным обозначением топографии сосудов. Постановка и коррекция МП возможна автоматически или в ручном режиме во время или после создания Модели-1 (на любом этапе при подготовке к операции) с помощью системы управления компьютером.
При построении Модели-1 пользователь может управлять визуальными характеристиками модели, выделением границ новообразований и представлением топографии кровеносной сети. Включена возможность супервизии на каждом этапе. На основе построенной 3D Модели-1 хирург формирует этапы оперативного вмешательства с целью удаления новообразования при минимальной травматизации здоровых тканей органа.
На интраоперационном этапе происходит импорт Модели-1 в ПАК-2 и создание Модели-2 путем наложения Модели-1 на текущее интраоперационное видеоизображение и совмещения соответствующих МП. МП при текущем видеоизображении на мониторе отмечаются (касанием стилусом или мышью) в соответствии с аналогичными МП, выставленными на первом этапе при создании Модели-1. Предусмотрено также выставление МП с применением лапароскопического инструментария в брюшной полости на оперируемых органах и новообразованиях для передачи пространственных 3D координат в ПАК-2. В процессе операции при пространственном смещении органа или изменении его геометрии вследствие удаления новообразования повторная привязка модели происходит автоматически через фиксированные моменты времени, либо с помощью системы управления компьютером вручную.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сальпингэктомии | 2023 |
|
RU2825943C1 |
| Способ подготовки и выполнения хирургической операции с использованием дополненной реальности и комплекс оборудования для её осуществления | 2019 |
|
RU2707369C1 |
| Робот-ассистированный комплекс минимально инвазивной абдоминальной хирургии для автоматизированного выполнения операций методами локальной деструкции новообразований печени | 2023 |
|
RU2841089C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ АДЕНОМ ОКОЛОЩИТОВИДНЫХ ЖЕЛЕЗ ПРИ ПЕРВИЧНОМ ГИПЕРПАРАТИРЕОЗЕ | 2018 |
|
RU2688804C1 |
| Способ топической диагностики и визуализации аденом околощитовидных желез при вторичном и третичном гиперпаратиреозе | 2018 |
|
RU2683743C1 |
| СПОСОБ ПРЕДОПЕРАЦИОННОГО МОДЕЛИРОВАНИЯ И ИНТРАОПЕРАЦИОННОЙ НАВИГАЦИИ ОРГАНОСОХРАНЯЮЩЕГО ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ПАЦИЕНТОК С РАЗЛИЧНЫМИ ФОРМАМИ АДЕНОМИОЗА | 2024 |
|
RU2830339C1 |
| Способ регистрации пациента с его персонифицированной моделью в программном обеспечении хирургической навигационной системы при помощи рентгеновских изображений с использованием калибрующего устройства | 2023 |
|
RU2824966C1 |
| СПОСОБ ПРЕДОПЕРАЦИОННОЙ ПОДГОТОВКИ ПРИ МНОЖЕСТВЕННОЙ МИОМЕ МАТКИ | 2024 |
|
RU2837468C1 |
| Способ подготовки и выполнения хирургической операции на голове с использованием смешанной реальности | 2020 |
|
RU2754288C1 |
| СПОСОБ ОЦЕНКИ ВЕРОЯТНОСТИ НАЛИЧИЯ ТЯЖИСТОЙ ПАРАНЕФРАЛЬНОЙ ЖИРОВОЙ КЛЕТЧАТКИ, СПАЯННОЙ С КАПСУЛОЙ ПОЧКИ, ПРИ ПЛАНИРОВАНИИ ОРГАНОСОХРАНЯЮЩИХ ОПЕРАЦИЙ НА ПОЧКЕ | 2020 |
|
RU2736908C1 |
Изобретение относится к медицине, а именно к оперативной гинекологии, и может быть использовано при выполнении операций в области абдоминальной хирургии и онкологии. Предложен способ подготовки и выполнения органосохраняющей хирургической операции на органах малого таза с применением программно-аппаратного комплекса, который включает этапы создания предоперационной персонифицированной трехмерной математической и графической модели органов и новообразований в них, планирования - симуляции органосохраняющей хирургической операции, хирургического вмешательства с импортом предоперационной трехмерной модели создавая интраоперационную модель. Причем на этапе планирования операции пациенту проводят ультразвуковое исследование или компьютерную или магнитно-резонансную томографию и формируют предоперационную трехмерную модель органов и новообразований в них и план операции с хирургической навигацией. Далее предоперационная модель во время хирургического вмешательства адаптируется на интраоперационные параметры органов и новообразований и формируется интраоперационная модель с хирургической навигацией. На этапе построения предоперационной модели органов и новообразований в них, проводится моделирование новообразований в органах, имеющее интерес для хирурга в планируемой операции. Затем формируется предварительный план операции с обозначением навигационных меток для проведения разреза и удаления новообразования с минимальной травмой здоровой ткани органа. После чего проводится органосохраняющее лапароскопическое вмешательство, которое начинается с оценки топографии и размеров органов и новообразований в них и адаптации предоперационной трехмерной модели на интраоперационные параметры органов и новообразований, после которой с использованием программно-аппаратного комплекса на мониторах видеоэндоскопического комплекса предоставляется возможность оценить объемно новообразование в органе в режиме диалога, с визуализацией невидимых подтканевых структур и сосудов. После чего на адаптированной трехмерной модели появляются метки навигации, с помощью которых позиционируется место проведения разреза, после чего выполняют удаление новообразования из органа, в процессе оперативного вмешательства при пространственном смещении органов или изменении их геометрии вследствие удаления новообразований, повторная привязка модели происходит автоматически через фиксированные моменты времени, или с помощью системы управления компьютером вручную. Изобретение обеспечивает возможность удаления новообразований органов малого таза с минимальной травмой здоровой ткани органа, не требующей или требующей минимального применения методик коагуляции для остановки кровотечения. При операциях на яичниках техническим результатом также является сохранение здоровой ткани яичника и овариального резерва. 2 ил.
Способ подготовки и выполнения органосохраняющей хирургической операции на органах малого таза с применением программно-аппаратного комплекса в составе медицинского оборудования, вычислительного оборудования и систем управления ими и специального программного обеспечения, включающий этапы создания предоперационной персонифицированной трехмерной математической и графической модели органов и новообразований в них, планирования - симуляции органосохраняющей хирургической операции, хирургического вмешательства с импортом предоперационной трехмерной модели, создавая интраоперационную модель, в процессе оперативного вмешательства интраоперационная модель адаптируется к изменениям размеров органов и их топографии в реальном времени, причем на этапе планирования органосохраняющей хирургической операции пациенту проводят ультразвуковое исследование или компьютерную или магнитно-резонансную томографию и формируют предоперационную трехмерную математическую и графическую модель органов и новообразований в них, и план операции с хирургической навигацией, далее предоперационная модель во время хирургического вмешательства адаптируется на интраоперационные параметры органов и новообразований и формируется интраоперационная модель с хирургической навигацией, отличающийся тем, что на этапе построения предоперационной персонифицированной трехмерной математической и графической модели органов и новообразований в них, проводится моделирование новообразований в органах, имеющее интерес для хирурга в планируемой операции, благодаря чему возможно определить степень внедрения опухоли в здоровую ткань органа, границы новообразования относительно здоровой ткани органа, визуализировать подтканевые структуры, локализацию сосудистой сети вокруг новообразований, провести количественную и качественную оценку кровотоков вокруг новообразований, определить расположение органа с новообразованием относительно других органов в малом тазу, затем формируется предварительный план операции с обозначением навигационных меток для проведения разреза и удаления новообразования с минимальной травмой здоровой ткани органа, после чего проводится органосохраняющее лапароскопическое вмешательство, которое начинается с оценки топографии и размеров органов и новообразований в них и адаптации предоперационной трехмерной модели на интраоперационные параметры органов и новообразований, после которой с использованием программно-аппаратного комплекса на мониторах видеоэндоскопического комплекса предоставляется возможность оценить объемно новообразование в органе в режиме диалога, с визуализацией невидимых подтканевых структур и сосудов, после чего на адаптированной трехмерной модели появляются метки навигации, с помощью которых позиционируется место проведения разреза, после чего выполняют удаление новообразования из органа, в процессе оперативного вмешательства при пространственном смещении органов или изменении их геометрии вследствие удаления новообразований, повторная привязка модели происходит автоматически через фиксированные моменты времени, или с помощью системы управления компьютером вручную.
| Способ подготовки и выполнения хирургической операции с использованием дополненной реальности и комплекс оборудования для её осуществления | 2019 |
|
RU2707369C1 |
| US2016191887 A1 30.06.2016 | |||
| US2018168740 A1 21.06.2018 | |||
| КОЛСАНОВ А.В | |||
| и др | |||
| Виртуальное моделирование операции на печени на основе данных компьютерной томографии | |||
| АННАЛЫ ХИРУРГИЧЕСКОЙ ГЕПАТОЛОГИИ, 2016, т.21, no.4, сс.16-22. | |||

