Изобретение относится к протезному захватному модулю, содержащему основной корпус, на котором расположены соединительные средства для крепления на верхней конечности, из которого выступают вверх, по меньшей мере, два манипулятора, из которых первый манипулятор установлен с возможностью движения относительно второго манипулятора из отведенного в прилегающее положение. Изобретение относится, в частности, к так называемым крюкам, которые представляют собой простое и стабильное захватное устройство. При этом поворотная ось подвижного манипулятора ориентирована перпендикулярно основному корпусу, который имитирует пясть естественной руки.
Из уровня техники давно известны такие протезные захватные модули, например из GB 2109245 А1. Для перемещения установленного подвижно на основном корпусе манипулятора в направлении к неподвижному второму манипулятору, на проксимальном конце обоих манипуляторов расположена резиновая лента, размер которой выбран так, что оба манипулятора приводятся в прилегающее друг к другу положение. С помощью троса Боудена установленный подвижно манипулятор переводится в отведенное положение. За счет пружинной силы манипулятор перемещается в направлении к неподвижному манипулятору и может там удерживать предметы. Эти механические простые и надежные захватные устройства имеют тот недостаток, что сила захвата ограничена натяжением эластичной ленты. Кроме того, носителем протезного захватного модуля необходимо создавать относительно большие силы для отвода подвижного манипулятора.
Задачей данного изобретения является создание протезного захватного модуля, который более приятен при использовании пользователем протеза.
Эта задача решена согласно изобретению с помощью протезного захватного модуля с признаками пункта 1 формулы изобретения. Предпочтительные варианты выполнения и модификации изобретения приведены в зависимых пунктах формулы изобретения.
Протезный захватный модуль, содержащий основной корпус, на котором расположены соединительные средства для крепления на верхней конечности, из которого выступают, по меньшей мере, два манипулятора, из которых первый манипулятор установлен подвижно относительно второго манипулятора из отведенного в прилегающее положение и поворотная ось которого ориентирована перпендикулярно основному корпусу, предусматривает, что первый манипулятор приводится в движение с помощью мотора. За счет приведения в действие с помощью мотора подвижно установленного манипулятора обеспечивается возможность, независимо от упругого напряжения с помощью резиновой ленты, осуществлять быстрое и контролируемое приведение в действие, так что может достигаться большая захватная сила независимо от напряжения пружины. За счет этого пользователю больше нет необходимости прилагать соответствующую большую открывающую силу для захвата предмета с достаточно большой силой захвата. Моторный привод обеспечивает возможность быстрого приведения в действие, а также переключение по выбору захватного устройства в открытое или замкнутое исходное положение.
Если второй манипулятор жестко закреплен на основном корпусе или выполнен за одно целое с ним, то более простое конструктивное выполнение достигается за счет того, что лишь один манипулятор необходимо соединять с приводом. Однако в принципе может быть также предусмотрено, что второй манипулятор приводится в действие с помощью мотора, так что оба манипулятора установлены подвижно относительно друг друга.
Для обеспечения возможности согласования соответствующего манипулятора с желаемой целью применения или замены поврежденного манипулятора они закреплены на основном корпусе с возможностью замены, например привинчены или закреплены на нем с помощью карабинного замка. За счет этого можно устанавливать подходящий для цели применения манипулятор.
Основной корпус предпочтительно выполнен в виде корпуса для привода, так что внутри основного корпуса расположен привод. В качестве привода предусмотрен, в частности, электродвигатель, который предназначен для соединения или соединен непосредственно с подвижно установленным манипулятором. Подвижно установленный манипулятор можно соединять с приводом, соответственно электродвигателем, через передаточный механизм для обеспечения желаемого передаточного отношения и за счет этого согласования либо со скоростью перестановки, либо с силой захвата.
В экономящем место варианте выполнения изобретения предусмотрено, что привод в основном корпусе и первый манипулятор опираются на опору привода, чтобы тем самым обеспечивать возможно большую и стабильную опору для подвижного манипулятора.
Манипуляторы могут быть выполнены в виде крюка с целью обеспечения высокой вариабельности возможностей использования. Третий манипулятор может быть жестко закреплен на первом манипуляторе или сформирован на нем для обеспечения дополнительной возможности опоры для захватываемых предметов. Такой третий манипулятора предусмотрен, в частности, для опоры карандаша или другого инструмента, который зажимается между обоими манипуляторами. При этом первый манипулятор предпочтительно расположен между вторым и третьим манипуляторами и выступает вбок, например под прямым углом, от первого манипулятора. Третий манипулятор может быть также отогнут для предотвращения выскальзывания приложенного предмета.
На основном корпусе расположен приемный элемент для накопителя электрической энергии, так что можно легко выполнять замену накопителя. Накопитель энергии, например заряжаемая батарея, может быть легко соединен с основным корпусом, например, с помощью винтового механизма или карабинного замка, так что можно быстро заменять сменную батарею или сменный аккумулятор.
За счет приведения в действие установленного подвижно манипулятора с помощью двигателя обеспечивается возможность его управления с помощью миоэлектрических импульсов, для чего предусмотрено соответствующее миоэлектрическое управление привода. Таким образом, приведение в действие захватного модуля не требует широкого движения плеча, а может осуществляться с помощью миоэлектрических импульсов. Для обеспечения возможности работы привода, в частности двигателя, на основе миоэлектрических импульсов в основном корпусе расположено электронное управляющее устройство для привода, предпочтительно в капсуле, так что необходимо лишь выполнить соединение с электродами или датчиками миоэлектрических импульсов для приведения в действие протезного захватного модуля. Управляющее устройство может быть также расположено в накопителе энергии или же лежать внутри привода.
Как управляющий блок, так и привод заключены в непроницаемую для воды капсулу для обеспечения выполнения функций также при использовании протезного захватного модуля в неблагоприятных условиях.
Для достижения возможно более компактной конструкции приводная ось привода, соответственно двигателя, ориентирована параллельно, в частности, коаксиально поворотной оси первого манипулятора, так что возможно непосредственное соединение без отклоняющей передачи. Если необходимо включать промежуточную передаточную ступень, то её можно легко располагать и выполнять коаксиально.
Для обеспечения дальнейшей работы при выходе из строя двигателя, соответственно электроснабжения, привод выполнен с возможностью отсоединения от первого манипулятора. Для обеспечения необходимой захватной силы можно располагать вокруг манипулятора обычный накапливающий силу элемент, например, в виде эластичной ленты. Для этого на первом манипуляторе и на втором манипуляторе выполнены удерживающие приспособления для соответствующего пружинного элемента, например приемные элементы для эластичного кольца или для пружины растяжения.
В одной модификации изобретения на третий манипулятор установлен исполнительный рычаг, который через установленный с возможностью сдвига в продольном направлении трос Боудена соединен с носителем протезного захватного модуля. Через этот исполнительный рычаг можно осуществлять приведение в действие манипулятора привычным для пользователя протеза образом, если не предусмотрена миоэлектрическая связь. Установка с возможностью продольного сдвига обеспечивает возможность согласования с особенностями тела пользователя протеза. При этом приведение в действие осуществляется, как правило, с помощью движения плеча, так что для одного пользователя протеза с большим радиусом движения предпочтительным является расположение троса Боудена на дистальном конце третьего манипулятора, в то время как при ограничении подвижности или при небольшом радиусе движения на основе физиологических особенностей необходимо выбирать проксимальное расположение троса Боудена на рычаге.
В одной модификации изобретения предусмотрено, что имеется, по меньшей мере, один сенсорный блок для регистрации исполнительного элемента исполнительного рычага, соединенный с исполнительным рычагом, так что в зависимости от исполнительной силы и прикладываемых через исполнительный рычаг моментов можно осуществлять управление силой захвата. Чем больше исполнительные силы, тем больше устанавливается сила захвата, так что можно устанавливать согласованную силу захвата между обоими прилегающими друг к другу манипуляторами. Может также иметься датчик для определения фактической силы захвата, который передает обратное сообщение в управляющий блок и запирает привод или же обеспечивает сохранение силы захвата.
Для обеспечения возможности выполнения принципиальных регулировок силы закрывания или скорости поворотного движения на основном корпусе или на блоке накопителя энергии предусмотрены регулировочные приспособления, которые предпочтительно расположены на задней стороне захватного модуля, которая соответствует тыльной стороне кисти руки, с целью обеспечения легкого регулирования пользователем протеза. Привод выполнен реверсивным для обеспечения возможности открывания и закрывания захватного модуля. Могут быть также предусмотрены регулировочные приспособления или регулировочные устройства для переключения режима работы, при этом эти приспособления обеспечивают возможность переключения между различными видами управления, например между регулированием силы, регулированием положения, управлением EVO (electronic voluntary opening = электронное произвольное открывание) и управлением EVC (electronic voluntary closing = электронное произвольное закрывание). Регулировочные приспособления могут осуществлять как переключения режимов работы, так и регулирование силы или скорости.
Для отсоединения первого манипулятора от привода первый манипулятор соединен с приводом через смещаемый зубчатый венец, так что при выводе из зацепления зубчатого венца с приводом возможна перестановка независимо от привода.
В одной модификации изобретения предусмотрено, что привод имеет силовой ход и быстрый ход, между которыми можно переключаться механически или электрически. За счет этого можно обеспечивать возможность быстрого перемещения двух манипуляторов друг к другу сначала с большим передаточным отношением при приложении относительно небольшой силы захвата. При вхождении манипуляторов в контакт с подлежащим захвату объектом автоматически увеличивается сила захвата, в то время как скорость захвата уменьшается. Это переключение можно осуществлять чисто механически с помощью соответствующей системы переключательного сцепления или с помощью электронного управления.
Ниже приводится пояснение примеров выполнения изобретения со ссылками на прилагаемые чертежи, на которых одинаковыми позициями обозначены одинаковые или одинаково действующие конструктивные элементы, а именно на чертежах изображено:
фиг. 1 - частичный разрез захватного устройства;
фиг. 2 - первый вариант выполнения, в изометрической проекции сверху;
фиг. 3 - второй вариант выполнения, в изометрической проекции сверху;
фиг. 4 - захватное устройство согласно фиг. 2 с несмонтированным устройством накопителя энергии;
фиг. 5 - захватное устройство, в изометрической проекции снизу;
фиг. 6 - вариант выполнения согласно фиг. 2 с механизмом деблокирования; и
фиг. 7 - разрез опоры.
На фиг. 1 показан в частичном разрезе протезный захватный модуль 1 с основным корпусом 2, который изготовлен предпочтительно из металла, в частности легкого металла. На основном корпусе 2 предусмотрено соединительное средство 3 в виде резьбы в качестве нормированного соединения для протезного захватного модуля, например, на протезе предплечья или на приемном устройстве, которое закреплено на предплечье. Соединительное средство 3 выполнено, в частности, в виде винтовой резьбы. Соединительное средство может иметь другое выполнение, например в виде байонетного замка или т.п.
Внутри корпуса 2 расположен привод 4 в виде электродвигателя плоской конструкции. Основной корпус 2 образует раму или остов как для соединительного средства 3, так и для двух манипуляторов 10, 20, из которых в показанном примере выполнения первый манипулятор 10 установлен с возможностью поворота на основном корпусе 2. Второй манипулятор 20 закреплен неподвижно на основном корпусе 2, в частности привинчен или введен в приемный элемент и зафиксирован в нем. Привод 4 в виде электродвигателя установлен внутри основного корпуса 2 на подшипник 5, который одновременно представляет центральную опору для подвижного манипулятора 10.
В качестве альтернативного решения неподвижному расположению второго манипулятора 20 он может приводиться в действие также с помощью привода 4 и перемещаться относительно первого манипулятора 10. При этом поворотное движение происходит вокруг поворотной оси 14, которая проходит перпендикулярно опорной поверхности привода 4 и предпочтительно параллельно, в частности, коаксиально оси вращения привода 4. При этом поворотная ось 14 проходит перпендикулярно той поверхности, которая при естественной руке соответствовала бы ладони, соответственно тыльной стороне кисти руки. Оба манипулятора 10, 20 могут перемещаться в открытое положение или в прилегающее друг к другу положение для обеспечения возможности захвата объектов в положении прилегания друг к другу, соответственно зажимания между ними. Предпочтительно манипуляторы 10, 20 изогнуты на своих дистальных концах и тем самым выполнены в виде крюков, поскольку эта геометрия зарекомендовала себя особенно пригодной для простых захватных устройств.
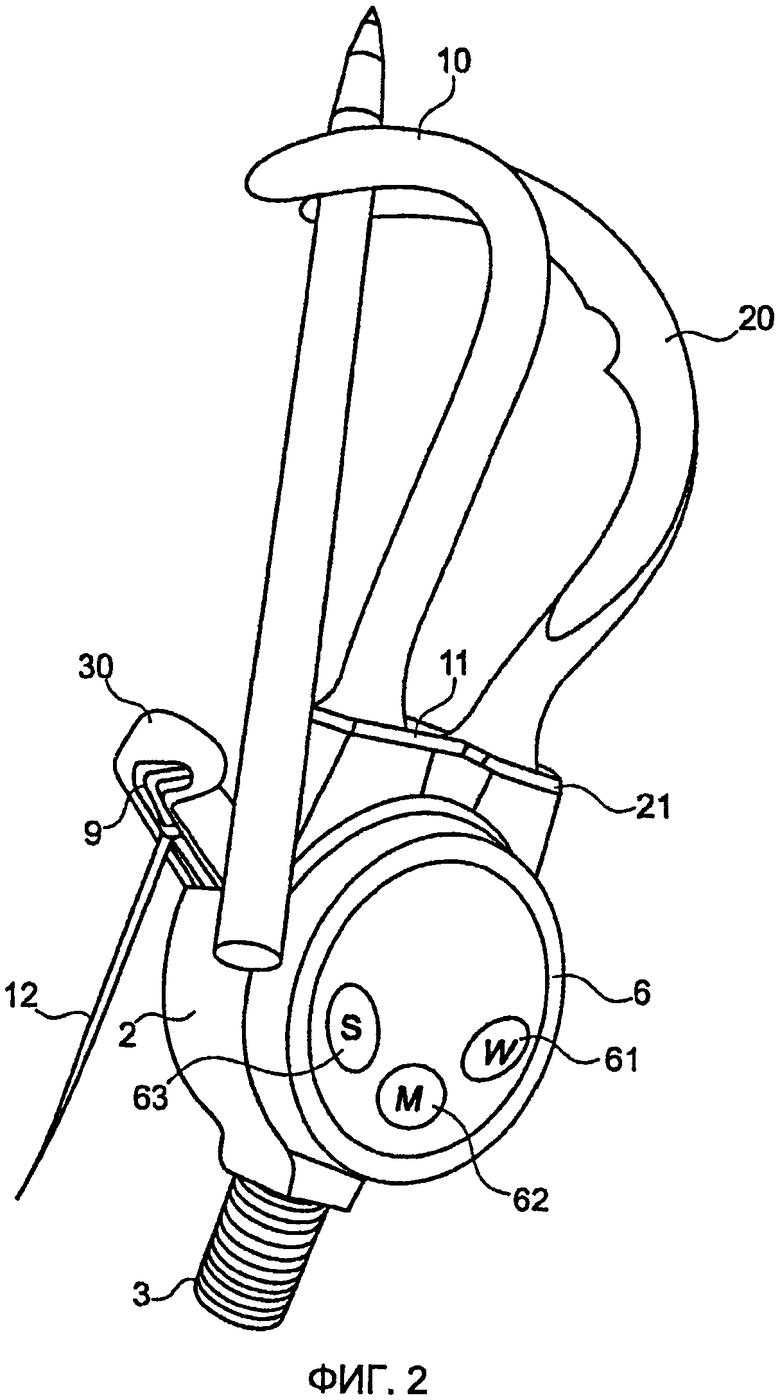
На верхней стороне основного корпуса 2 закреплена батарея 6, соответственно аккумулятор, который установлен с возможностью замены на основном корпусе 2. На сменном аккумуляторе 6 могут быть предусмотрены регулировочные приспособления, с помощью которых можно регулировать скорость перестановки, а также создаваемую между манипуляторами 10, 20 силу захвата. Позицией 30 обозначено острие третьего манипулятора, который не виден за основным приводом 4.
На проксимальных концах манипуляторов 10, 20 образованы выступы 11, 21, которые служат в качестве барьеров для эластичной ленты 8, так что она надежно удерживается на манипуляторах 10, 20 и защищена от соскальзывания в дистальном направлении.
На фиг. 2 показан в изометрической проекции сверху захватный модуль 1, так что можно видеть, что на первом манипуляторе 10 расположен третий манипулятор 30, который выполняет функцию большого пальца или соответственно манипулятора для подлежащего захвату предмета, в показанном примере выполнения карандаша. Третий манипулятор 30 вместе с первым манипулятором 10 установлен с возможностью поворота на основном корпусе 2, предпочтительно приемный элемент для первого манипулятора 10 вместе с третьим манипулятором 30 образует единый конструктивный элемент. В качестве альтернативного решения, третий манипулятор 30 может быть также привинченным или вставленным.
Второй манипулятор 20 в показанном примере выполнения закреплен неподвижно и с возможностью замены на основном корпусе 2.
Соединительное средство 3 можно заменять миоэлектрическим соединительным компонентом, в котором необходимо предусматривать дополнительные кабели к приводу 4. При миоэлектрическом соединительном компоненте кабели предпочтительно пропускаются через соединительное средство 3.
На верхней стороне протезного захватного модуля 1 и там на верхней стороне накопителя 6 энергии имеются сенсорные поверхности 61, 62, 63 в качестве регулировочных устройств для максимальной активной силы закрывания манипуляторов 10, 20 и, возможно, скорости закрывания.
Внутри третьего манипулятора 30 расположен исполнительный рычаг 9, который приводится в действие с помощью троса 12 Боудена, который установлен с возможностью сдвига и фиксации на исполнительном рычаге 9. Трос 12 Боудена расположен на предплечье или плече пользователя протеза и вызывает при движении плеча включение электродвигателя 4 и за счет этого закрывание манипуляторов 10, 12, соответственно их открывание. Открывание может происходить при повторном приведении в действие троса 12 Боудена. Для этого предусмотрено, что привод 4 выполнен реверсивным.
Вариант выполнения согласно фиг. 2 показан на фиг. 3, в этом варианте регулирование осуществляется не с помощью точкообразных сенсорных полей 61, 62, 63, а с помощью поворотного закрывающего колпачка 65. Возможность поворота в обоих направлениях обозначена двойной стрелкой. При повороте по часовой стрелке сила захвата увеличивается, при повороте против часовой стрелки сила захвата уменьшается.
Кроме того, на задней стороне аккумулятора 6 могут быть расположены другие сенсорные поля или другие возможности регулирования, например скорости перестановки или переключения режимов управления. Возможно также расположение сенсорных полей не на задней стороне, соответственно верхней стороне захватного модуля 1, а сбоку на корпусе 2.
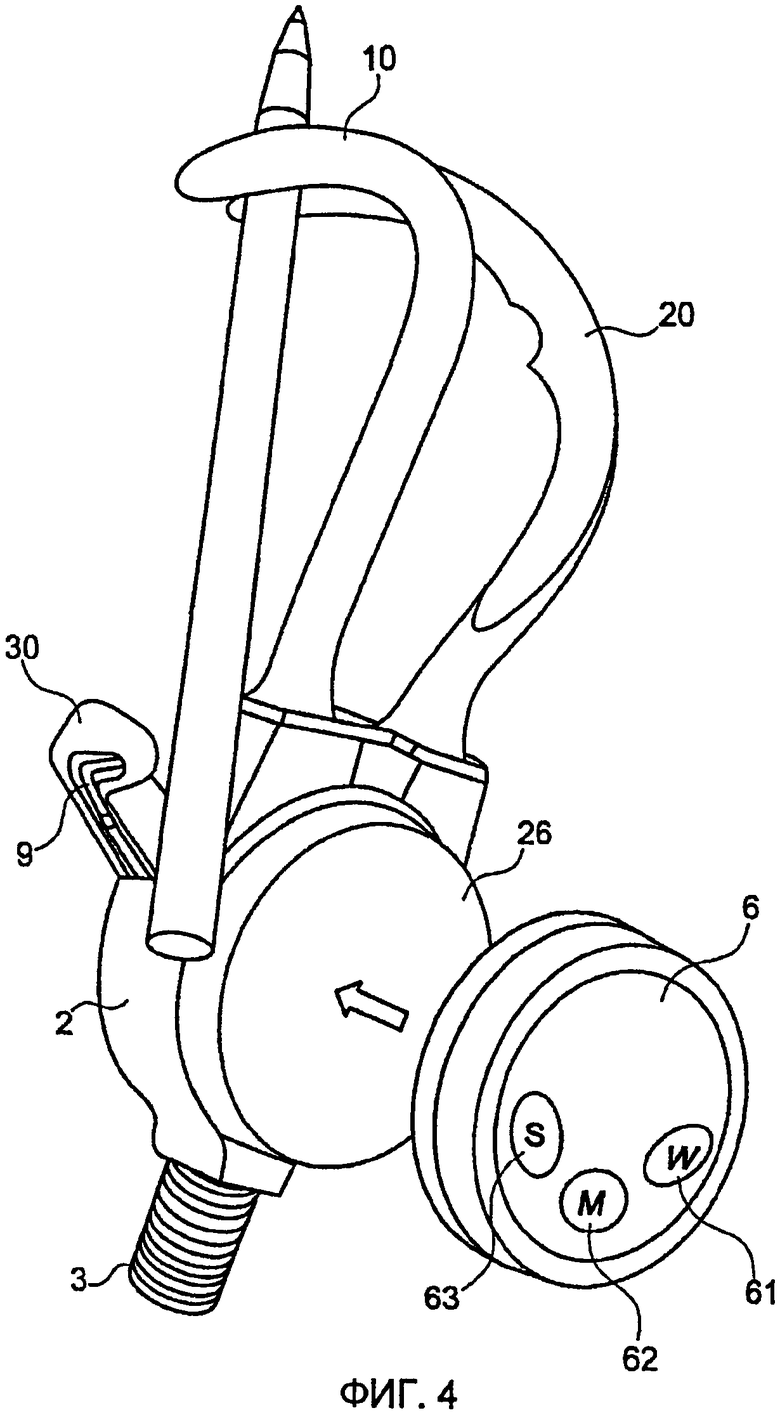
На фиг. 4 показан вариант фиг. 2, в котором накопительное устройство 6 для электрической энергии может быть прикреплено в виде заменяемой капсулы на задней стороне захватного модуля 1 к соответственно выполненному приемному элементу 26. Фиксация накопительного устройства 6 осуществляется за счет завинчивания или альтернативных видов крепления, в частности, с геометрическим замыканием. За счет возможности замены накопительного устройства 6 можно увеличивать независимость пользователя протеза, поскольку более длительное рабочее состояние обеспечивается за счет простой и быстрой замены аккумулятора 6. Сам аккумулятор 6 выполнен водонепроницаемым и имеет контакты для привода 4, которые также выполнены водонепроницаемыми. На задней стороне захватного модуля 1, соответственно в аккумуляторе 6, могут быть расположены дополнительные сенсорные элементы, при этом за счет расположения аккумулятора 6 на задней стороне не загораживается вид на захватываемый предмет.
За счет интеграции аккумулятора 6 в захватный модуль 1 можно создавать автономную захватную систему, которую можно легко заменять обычной механической захватной системой. Расположение троса 12 Боудена можно выбирать так, что нет необходимости в новой юстировке или отклонении тяг, так что обеспечивается возможность замены приводимого в действие двигателем захватного модуля 1 на обычную систему.
На фиг. 5 показана нижняя сторона захватного модуля 1 для иллюстрации исполнительного рычага 9 и принципа его действия. Трос 12 Боудена может быть установлен через имеющий форму шарика концевой элемент или зажимное приспособление с возможностью сдвига на исполнительном рычаге 9, как это обозначено двойной стрелкой. На исполнительном рычаге 9 предусмотрено также сдвигаемое крепление троса 12 Боудена. На нижней стороне корпуса 2 или внутри корпуса 2 расположено сенсорное устройство 13, которое измеряет исполнительный момент на исполнительном рычаге 9. Рычажное плечо L, которое образовано исполнительным рычагом 9, соответственно точкой приложения силы троса 12 Боудена вдоль его пути сдвига, обеспечивает то, что сигнал датчика 13, который возникает за счет силы растяжения внутри троса 12 Боудена, является независимым от позиции концевого элемента троса 12 Боудена на исполнительном рычаге 9. За счет этого можно создавать сигнал сенсорного устройства 13, который пропорционален силе растяжения троса 12 Боудена. Таким образом, точку приложения троса 12 Боудена можно выбирать в любом месте внутри зоны сдвига, при этом приемный элемент троса 12 Боудена в соединительной части, соответственно зажимном приспособлении, выбирается так, что возможна быстрая замена приводимого в действие двигателем захватного модуля 1 обычным захватным модулем. Вторая точка опоры исполнительного рычага 9 находится на загнутом вверх конце третьего манипулятора 30, в так называемом большом пальце.
На фиг.6 показан вариант выполнения изобретения, в который интегрировано защитное устройство, которое при выходе из строя электроснабжения обеспечивает возможность открывания вручную манипуляторов 10, 20. За счет сдвига регулировочного устройства выводится из зацепления плоский зубчатый венец внутри привода 4, так что освобождается подвижно установленный манипулятор 10 и тем самым третий манипулятор 30. Исполнительный элемент 16 действует в обоих направлениях сдвига, так что сдвигание можно выполнять также в обе стороны. После расцепления установленных с возможностью поворота манипуляторов 10, 30 от привода 4 может быть реализована возможность свободного движения. Для обеспечения возможности закрывания манипуляторов 10, 20 предусмотрен пружинный элемент 8 в виде эластичного кольца, соответственно в виде эластичной ленты, которая установлена в качестве резерва для обеспечения силы закрывания. Выступы 11, 21 предотвращают соскальзывание манипуляторов 10, 20. С помощью троса 12 Боудена и выполненного соответственно стабильным исполнительного рычага 9 можно приводить в действие захватное устройство 1 даже без электроснабжения, соответственно при электрической неисправности, так что осуществляется аварийный режим работы, хотя и с потерей преимуществ данного изобретения.
Внутри корпуса 2 могут быть расположены управляющие устройства для миоэлектрического управления, управляющее устройство может быть также отдельно интегрировано внутри аккумулятора 6. Регулирование силы захвата можно выполнять с помощью потенциометра, так же как регулирование скорости движения закрывания, соответственно открывания. В качестве альтернативного решения предусмотрено механическое управление посредством приведения в действие исполнительного рычага 9 и за счет движения плеча.
С помощью датчиков можно определять соответствующее положение манипуляторов 10, 20, так что при приложении миоэлектрического сигнала может осуществляться правильное согласование вращательного движения привода 4. Исходное положение захватного модуля можно выбирать произвольно, или открытое при отведенных друг от друга манипуляторах 10, 20 или закрытое. С помощью проприоцепторной сенсорной техники можно обеспечивать согласованную силу захвата. В то время как обычные механические захватные модули открываются за счет приложения через трос Боудена силы, противоположной силе пружины, это же можно осуществлять относительно просто с помощью мотора и простого сигнала. Чисто механическое открывание захватного модуля требует в 2-4 раза большей силы натяжения троса Боудена, чем создаваемая у вершины манипуляторов 10, 20 сила. Поэтому исполнительный путь соответственно небольшой и создается движением плеча. Достигаемая сила захвата при чисто механическом решении определяется силой пружины, соответственно резиновой ленты, и передаточным отношением рычага. С помощью привода от двигателя и зависящего от силы управления можно согласовывать подлежащие созданию на манипуляторах силы с исполнительными силами, однако разъединять по их величине. Большие силы на исполнительном рычаге 9 приводят к увеличенной силе закрывания, однако величину силы закрывания можно устанавливать независимо от величины исполнительной силы. За счет этого исполнительная сила не зависит от исполнительного пути, поскольку имеется сенсорная техника для измерения силы внутри троса 12 Боудена. Это важно для согласования с пациентом, поскольку можно учитывать различные физиологические особенности. Исполнительный путь для полного открывания манипуляторов 10, 20 определяется положением троса 12 Боудена на исполнительном рычаге 9. Для небольших пациентов или пациентов с ограниченной подвижностью точка соединения выбирается вблизи первого манипулятора 10, т.е. вблизи поворотного центра, для больших пациентов с большой подвижностью в области плеча можно предусматривать максимально дистальную точку соединения для троса Боудена.
Может быть предусмотрено соответствующее управление, при котором захватный модуль в принципе остается закрытым до достижения установленной силы, соответственно установленного момента. Эта установленная сила может в несколько раз превышать силу, которая обычна или возможна в известных механических захватных модулях.
На фиг.7 показана в разрезе опора подвижного манипулятора 10 на основной корпус 2. Внутри основного корпуса 2 установлен весь привод 4 с двигателем, который имеет статор 41 и ротор 42. Закрывающий колпачок 13 закрывает привод 4 снаружи. Ротор 42 вращается вокруг поворотной оси 14 и опирается на подшипник 43 ротора. Внутри основного корпуса 2 и привода 4 расположено электронное устройство 44 управления и двигателя, с помощью которого можно устанавливать различные режимы движения или скорости, соответственно силы захвата. Через эксцентрик 45 с соединительной частью с ротором 42 ротор соединен с циклоидным диском 46, который с помощью штифтов соединен с приводным диском 48. Приводной диск 48 установлен на наружном кольце 47 основного подшипника и соединен с диском 49, который установлен подвижно относительно основного корпуса 2 и на котором закреплен подвижный манипулятор 10. Диск 49 фиксирован на приводном диске 48 с помощью винта. Основной подшипник 47 удерживается в основном корпусе 2 с помощью держателя 40, который фиксирован с помощью винтов на основном корпусе 2. При этом держатель 40 давит на наружное кольцо основного подшипника 47.
Как показано в верхней части на фиг.2, неподвижный манипулятор 20 закреплен через цапфу на основном корпусе 2, например привинчен или зажат. Привод 4 и подвижный манипулятор 10 в показанном примере выполнения опираются совместно через основной подшипник 47 на основной корпус 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТЕЗНОЕ УСТРОЙСТВО | 2016 |
|
RU2735674C2 |
| ОПУСКНАЯ БАГАЖНАЯ СЕКЦИЯ С РАСПОЛОЖЕННЫМ С ЕЕ ТЫЛЬНОЙ СТОРОНЫ СИЛОВЫМ ВСПОМОГАТЕЛЬНЫМ МЕХАНИЗМОМ | 2003 |
|
RU2300485C2 |
| УСТРОЙСТВО ЭЛЕКТРИЧЕСКОГО ПУСКА ПРОЦЕССА СМЫВА С ПОМОЩЬЮ СМЫВНОГО БАЧКА ТУАЛЕТА | 2008 |
|
RU2461683C2 |
| ЗАМОК АВТОМОБИЛЬНОЙ ДВЕРИ | 2012 |
|
RU2621658C2 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| УСТРОЙСТВО РАЗБЛОКИРОВКИ | 2010 |
|
RU2516801C2 |
| ЗАМОК ДВЕРИ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2701241C2 |
| КОНСТРУКЦИЯ НАРУЖНОЙ ДВЕРНОЙ РУЧКИ ДЛЯ АВТОМОБИЛЯ | 2018 |
|
RU2710798C1 |
| ТОРМОЗНОЙ ЦИЛИНДР ПРУЖИННОГО АККУМУЛЯТОРА ЭНЕРГИИ | 2012 |
|
RU2605144C2 |
| ИСКУССТВЕННЫЙ ПАЛЕЦ | 2014 |
|
RU2667624C2 |





Изобретение относится к медицине. Протезный захватный модуль содержит основной корпус, на котором расположены соединительные средства для крепления на верхней конечности и из которого выступают, по меньшей мере, два манипулятора, из которых первый манипулятор установлен относительно второго манипулятора подвижно из отведенного в прилегающее положение, а поворотная ось ориентирована перпендикулярно основному корпусу, причем первый манипулятор приводится в движение с помощью мотора, модуль отличается тем, что привод установлен внутри основного корпуса посредством опоры и первый манипулятор опирается на эту опору привода. Изобретение обеспечивает возможность носителю протезного захватного модуля создавать относительно небольшие силы для отвода подвижного манипулятора. 22 з.п. ф-лы, 7 ил.
1. Протезный захватный модуль (1), содержащий основной корпус (2), на котором расположены соединительные средства (3) для крепления на верхней конечности и из которого выступают, по меньшей мере, два манипулятора (10, 20), из которых первый манипулятор (10) установлен относительно второго манипулятора (20) подвижно из отведенного в прилегающее положение, а поворотная ось (14) ориентирована перпендикулярно основному корпусу (2), причем первый манипулятор (10) приводится в движение с помощью мотора, отличающийся тем, что привод (4) установлен внутри основного корпуса (2) посредством опоры (5), и первый манипулятор (10) опирается на эту опору (5) привода (4).
2. Протезный захватный модуль по п.1, отличающийся тем, что второй манипулятор (20) жестко закреплен на основном корпусе (2).
3. Протезный захватный модуль по п.1, отличающийся тем, что второй манипулятор (20) приводится в действие с помощью мотора.
4. Протезный захватный модуль по любому из пп.1-3, отличающийся тем, что манипуляторы (10, 20, 30) закреплены на основном корпусе (2) с возможностью замены.
5. Протезный захватный модуль по любому из пп.1-3, отличающийся тем, что первый манипулятор (10) соединен с приводом (4) через передаточный механизм.
6. Протезный захватный модуль по любому из пп.1-3, отличающийся тем, что манипуляторы (10, 20, 30) выполнены в виде крюка.
7. Протезный захватный модуль по любому из пп.1-3, отличающийся тем, что третий манипулятор (30) жестко закреплен на первом манипуляторе (10) или сформирован на нем.
8. Протезный захватный модуль по п.7, отличающийся тем, что первый манипулятор (10) расположен между вторым и третьим манипуляторами (20, 30).
9. Протезный захватный модуль по любому из пп.1-3, отличающийся тем, что на основном корпусе (2) расположен приемный элемент (26) для накопителя (6) электрической энергии.
10. Протезный захватный модуль по любому из пп.1-3, отличающийся тем, что предусмотрено миоэлектрическое управление приводом (4).
11. Протезный захватный модуль по любому из пп.1-3, отличающийся тем, что в основном корпусе (2) расположено электронное управляющее устройство для привода (4).
12. Протезный захватный модуль по любому из пп.1-3, отличающийся тем, что управляющее электронное устройство расположено в приводе (4).
13. Протезный захватный модуль по любому из пп.1-3, отличающийся тем, что привод (4) заключен в непроницаемую для воды капсулу.
14. Протезный захватный модуль по любому из пп.1-3, отличающийся тем, что приводная ось (14) привода (4) ориентирована параллельно, в частности коаксиально поворотной оси первого манипулятора (10).
15. Протезный захватный модуль по любому из пп.1-3, отличающийся тем, что на основном корпусе (2) расположено регулировочное приспособление (61, 62, 63, 65) для силы закрывания и/или скорости поворотного движения.
16. Протезный захватный модуль по любому из пп.1-3, отличающийся тем, что на основном корпусе (2) расположено регулировочное приспособление (61, 62, 63, 65) для переключения режима работы.
17. Протезный захватный модуль по любому из пп.1-3, отличающийся тем, что привод (4) выполнен с возможностью реверсивной работы.
18. Протезный захватный модуль по любому из пп.1-3, отличающийся тем, что привод имеет силовой ход и быстрый ход, между которыми может осуществляться переключение механически или электрически.
19. Протезный захватный модуль по любому из пп.1-3, отличающийся тем, что привод (4) выполнен с возможностью отсоединения от первого манипулятора (10).
20. Протезный захватный модуль по любому из пп.1-3, отличающийся тем, что на первом манипуляторе (10) и втором манипуляторе (20) расположены удерживающие приспособления (11, 21) для пружинного элемента (8).
21. Протезный захватный модуль по любому из пп.1-3, отличающийся тем, что на третьем манипуляторе (30) установлен исполнительный рычаг (9), который через установленный с возможностью продольного сдвига трос (12) Боудена соединен с носителем протезного захватного модуля.
22. Протезный захватный модуль по п.21, отличающийся тем, что имеется сенсорный блок (13) для регистрации исполнительного момента исполнительного рычага (9).
23. Протезный захватный модуль по любому из пп.1-3, отличающийся тем, что первый манипулятор (10) соединен через установленный с возможностью смещения зубчатый венец с приводом (4), и предусмотрена возможность вывода зубчатого венца из зацепления с приводом (4).
| US 4685925 A, 11.08.1987 | |||
| US 4114464 A, 19.09.1978 | |||
| УСТРОЙСТВО ДЛЯ ТИСНЕНИЯ И/ИЛИ ПЕРФОРИРОВАНИЯ ЛИСТОВЫХ МАТЕРИАЛОВ ДЛЯ ТАБАЧНЫХ ИЗДЕЛИЙ | 2013 |
|
RU2640994C2 |
| US 4808187 A, 28.02.1989 | |||
| СИЛОВОЙ УНИВЕРСАЛЬНЫЙ ЗАХВАТ-НАСАДКА К РАБОЧИМ ПРОТЕЗАМ РУКИ | 1996 |
|
RU2110235C1 |
| Протез кисти | 1991 |
|
SU1836061A3 |
| 0 |
|
SU261276A1 | |
| US 5013326 A, 07.05.1991. | |||

