Данное изобретение касается протезного устройства, содержащего закрепленный на бандаже с контролируемым натяжением натяжной элемент, который при приложении усилия натяжения приводит в действие подвижный компонент протезного устройства. Протезное устройство выполнено, в частности, как протез руки.
Протезы заменяют отсутствующие или утраченные конечности. Наряду с чисто косметическими протезами, которые заменяют отсутствующие конечности лишь по форме, в преобладающем количестве современных протезов делаются попытки заменить одну или несколько функций конечностей или обеспечить функциональность, подобную той, какую имеют природные конечности.
Протезы для нижних конечностей могут быть выполнены в виде протезов ступни, которые крепятся к приемной гильзе голени. Более сложные протезы заменяют коленный сустав, причем среди них имеются протезы различных степеней сложности от одноосевых коленных суставов с неподвижной опорой до многозвенных коленных суставов, управляемых с помощью компьютера пассивных коленных протезов и приводных коленных протезов. Кроме того, имеются протезные устройства для пациентов экзартикуляцией тазобедренного сустава.
Природные верхние конечности в состоянии выполнять множество движений. Захватывающая и удерживающая функции руки, различные вращательные движения предплечья, а также высокая подвижность внутри плечевого сустава делают возможным выполнение множества операций и движений, которые лишь с большим трудом могут воспроизводиться в искусственной системе. Имеются также протезные устройства верхних конечностей различной степени сложности, начиная от простых крюков, до захватных устройств и приводных протезов рук или протезов руки с моторным приводом, управляемых миоэлектрически.
Наряду с управляемыми с помощью компьютера и с использованием сенсоров протезными устройствами большой сложности по-прежнему существует потребность в сравнительно простых, механических протезных устройствах, которые приводятся в действие через так называемые бандажи с контролируемым натяжением. При этом подвижный компонент протеза верхней конечности приводится в действие движением плеча, например, плеча с контралатеральной, свободной стороны. При этом подвижный компонент может двигаться в одном направлении либо с преодолением силы тяжести, либо с преодолением противодействия, например, усилия пружины. Если активные функции протезного устройства запускаются только усилием с помощью бандажа с контролируемым натяжением, то такие протезы называют тяговыми (механическими) протезами (Eigenkraftprothesen). По сравнению с протезами с электрическими приводами тяговые (механические) протезы имеют возможность прямого управления и проприоцептивной обратной связи.
Обычное применение тяговых (механических) протезов заключается в том, что с помощью бандажа с контролируемым натяжением захватное устройство или захватный элемент раскрываются с преодолением противодействия, в частности, усилия пружины. Это противодействие может прикладываться посредством пружин сжатия, пружин, работающих на растяжение или резиновых колец, или пневматически, или иным образом и создает, тем самым, захватное усилие. Поскольку при многих видах деятельности предпочтительно большое захватное усилие, устанавливаются сравнительно мощные пружины или резиновые кольца, или элементы, создающие усилие. Такое противодействие должно преодолеваться при раскрытии захватного устройства, т.е. пациентом должно прикладываться усилие с помощью бандажа с контролируемым натяжением. Продолжительная работа с преодолением сравнительно высоких противодействующих усилий может привести к преждевременному утомлению или к вредным для здоровья пациента нарушениям.
Патент DE 2639143 C2 касается передачи для ортеза или протеза, обеспечивающей преобразование вращательного движения приводного агрегата в возвратно-поступательное движение подвижной части ортеза или протеза. Эта передача имеет конструктивный элемент, удерживаемый с возможностью вращения, соединенный с приводным агрегатом и снабженный резьбой, а также находящуюся в зацеплении с ним часть передачи, установленную в корпусе без возможности проворачивания. Конструктивный элемент состоит из открытого с одной стороны полого цилиндра с внутренней резьбой и с наружной резьбой, которые имеют противоположный шаг. Один конец тросиковой тяги или цепной тяги закреплен на взаимодействующем с внутренней резьбой установочном винте, а другой конец закреплен на взаимодействующей с наружной резьбой втулке. Эта передача выполнена по типу двойного шпинделя, благодаря чему по всему пути перемещения тяговые усилия, воздействующие на тросиковую или цепную тягу, остаются по существу постоянными.
Патент DE 821690 B касается протеза кисти с полым корпусом кисти, в котором расположен дисковый кулачок. С помощью рычажного механизма и накладок, работающих на растяжение, вращение дискового кулачка преобразуется в движение пальцев, чтобы вызывать раскрытие или сжатие кисти.
Патент DE 2607499 C3 касается приводного устройства для пальцев искусственной кисти, у которой подвижный большой палец и по меньшей мере один движущийся навстречу ему палец приводятся в действие от двигателя с помощью самотормозящейся передачи. Червяк находится в непосредственном зацеплении с закрепленными на подвижных пальцах и большом пальце зубчатых колесиках. Эти зубчатые колесики входят в зацепление с червяком с диаметрально противоположных сторон, причем червяк приводится в действие с помощью переключаемой передачи.
Заявка US 4,604,098 A касается протеза руки с узлом предплечья, локтевым шарниром с блокировочными элементами и запирающими элементами для предотвращения сгибания локтя, и с узлом плеча, который посредством локтевого шарнира соединен с узлом предплечья. С помощью мотора узел предплечья движется относительно узла плеча вокруг локтевого шарнира. С помощью деблокирующего механизма блокировочные средства могут выводиться из зацепления, чтобы сделать возможным движение. Сгибание, а также блокировка или разблокирование управляются электроникой.
Поэтому задача данного изобретения заключается в том, чтобы предложить протезное устройство, с помощью которого гарантируется возможность не вызывающей утомления работы и на пациента оказывается незначительная нагрузка.
Согласно изобретению эта задача решается в протезном устройстве с признаками независимого пункта формулы изобретения, а предпочтительные варианты выполнения и модификации изобретения раскрыты в зависимых пунктах формулы, в описании и на чертежах.
Предлагаемое изобретением протезное устройство, содержащее закрепленный на бандаже с контролируемым натяжением натяжной элемент, который при приложении усилия натяжения приводит в действие подвижный компонент протезного устройства, предусматривает, что натяжной элемент связан с сенсорным устройством, которое улавливает срабатывание натяжного элемента и запускает двигатель, связанный с подвижным компонентом. С помощью сенсорного устройства устанавливается, передаются ли и как тяговые усилия посредством бандажа с контролируемым натяжением на натяжной элемент. Сенсорное устройство измеряет величину прикладываемого усилия натяжения. Это сенсорное устройство передает выработанные сигналы сенсоров на управляющее устройство, которое связано с этим сенсорным устройством. С помощью этого управляющего устройства управляется двигатель, т.е. в зависимости от сигналов сенсоров приводится в действие, чтобы приводить в действие подвижный компонент или по меньшей мере поддерживать намеренное движение подвижного компонента. Через бандаж с контролируемым натяжением происходит непосредственная обратная связь с пользователем протезного устройства, так что сохраняются преимущества обычного тягового (механического) протеза. Одновременно снижается усилие, которое должно прикладываться посредством этого бандажа с контролируемым натяжением, так как для приведения в действие подвижного компонента с преодолением силы тяжести или с преодолением усилия пружины необходимо прикладывать всего лишь небольшое усилие, поскольку двигатель поддерживает целевое движение. В отличие от протезов, приводимых в действие исключительно от двигателя, здесь предпочтительно, чтобы на подвижный компонент и дальше посредством бандажа с контролируемым натяжением оказывалось усилие, приводящее в действие. Подобно тому, как это имеет место при рулевом управлении с сервомеханизмом, намеренное движение выполняется посредством натяжного элемента, и лишь уменьшается прикладываемое пациентом усилие.
Подвижный компонент может при этом быть выполнен предпочтительно как механический захватный элемент или захватное устройство, или как шарнирный компонент. Предпочтительно механическое захватное устройство раскрывается с преодолением противодействия, в частности, усилия пружины, а при снятии усилия натяжения и при поддержке от двигателя это механическое захватное устройство закрывается, так что для крепкого захватывания или фиксирования предмета не требуется прикладывать никакого дополнительного усилия. Удерживающее усилие создается элементом, прикладывающим предварительное натяжение или усилие. В принципе также можно предусмотреть, что закрывающее движение захватного устройства посредством бандажа с контролируемым натяжением и натяжного элемента согласно изобретению будет выполняться при поддержке от двигателя. При снятии усилия натяжения и поддержки от двигателя захватное устройство раскрывается под воздействием усилия пружины, а при другом варианте выполнения - с преодолением усилия пружины. В порядке альтернативы или дополнительно к чисто механическому захватному устройству предусмотрено, что таким же образом приводится в действие и шарнирный компонент протезного устройства. Предусмотрено смещение компонента протеза в определенном направлении, будь то против усилия пружины или против действия силы тяжести. Например, компоненты протеза могут быть смещены относительно оси поворота с преодолением усилий пружины, причем эти усилия пружины удерживают компонент протеза в исходном положении. В зависимости от направления усилия может иметь место угловое смещение или поворачивание этого компонента протеза в том или ином направлении. Это механическое захватное устройство может иметь два или более крючкообразных захватных элемента и, в частности, может быть выполнено в виде так называемого крюка. Помимо двухпальцевого захватного устройства можно предусмотреть также протез руки в виде захватного устройства.
Одной модификацией данного изобретения предусматривается, что вспомогательное усилие, приложенное посредством двигателя, пропорционально силе натяжения, прикладываемой посредством натяжного элемента. Благодаря этому обеспечивается прямая проприоцептивная обратная связь, и чем большее усилие прикладывается через бандаж с контролируемым натяжением, тем больше сила натяжения, прикладываемая к подвижным компонентам, с одной стороны, а с другой стороны, повышается вспомогательное усилие, дополнительно создаваемое посредством двигателя. В частности, при закрывании механического захватного устройства посредством усилия натяжения и при поддержке от двигателя обеспечиваются выраженные преимущества прямой обратной связи. Точно так же могут устанавливаться точка нажима и точка хвата.
Предпочтительно двигатель через передачу связан с натяжным элементом и/или с подвижным компонентом. Промежуточное включение одной или нескольких передач позволяет использовать маленькие, высокоскоростные и легкие двигатели, что особенно благоприятно с учетом предпочтительного применения в протезах верхних конечностей, поскольку там мало пространства для установки двигателей и аккумуляторов. В качестве передач могут использоваться тросиковая передача, зубчатая ременная передача, зубчатая передача, передача барабанного типа или фрикционная передача, или планетарная передача. В частности, предпочтительно применять тросиковые передачи, так как в обычных механических захватных устройствах передача усилия от контралатерального плеча к механическому захватному устройству происходит через тросиковую тягу, при необходимости с направляющими роликами.
Как передаточное число, так и коэффициент пропорциональности предпочтительно могут регулироваться, чтобы обеспечивать подгонку под различные цели применения. Точно так же предпочтительно коэффициент пропорциональности вспомогательного усилия может регулироваться с помощью двигателя, равно как и усиление мощности или мощность поддержки могут регулироваться с помощью двигателя. Так, если поддержка не требуется, на двигатель может подаваться меньше энергии, или он может отключаться, вследствие чего продолжительность использования протезного устройства увеличивается, поскольку доставляется лишь столько вспомогательной энергии, сколько требуется.
В одной модификации данного изобретения предусматривается, что к подвижному компоненту прикладывается усилие пружины, которое противодействует натяжному элементу и/или двигателю. Благодаря этому можно влиять на раскрытие или закрытие захватного устройства, или, соответственно, на сгибание или распрямление шарнирного компонента и, в частности, делать возможным в захватном устройстве определенное удерживающее усилие без дополнительного движения или дополнительного подвода энергии. За счет этого в шарнирных устройствах одно положение компонентов относительно друг друга может быть задано как предпочтительное положение, которое может быть изменено лишь путем приложения усилия, превышающего установленное пороговое значение.
Сенсорное устройство может содержать датчик силы в натяжном элементе или в направляющем ролике, чтобы можно было обеспечивать согласованное дополнительное усилие, которое, например, пропорционально усилию, прикладываемому пользователем. Коэффициент пропорциональности по усилию не обязательно должен быть линейным, дополнительное усилие посредством двигателя при возрастающем усилии может увеличиваться сверхпропорционально. Возможно также, что максимальное прикладываемое усилие ограничивается, т.е. что сумма усилия, передаваемого через натяжной элемент и усилия, передаваемого на подвижный компонент, ограничивается заданным максимальным значением.
В одном варианте выполнения изобретения сенсорное устройство или датчик силы выполнен как штыревой датчик силы. Этот сенсор предпочтительно выполнен как штыревой датчик силы внутри натяжного элемента, так что имеет место простое определение усилия, действующего внутри натяжного элемента. Посредством усилителя сигнала это усилие может измеряться, и дополнительно подводимое усилие от двигателя может прикладываться пропорционально силе натяжения. Помимо линейной пропорциональности могут быть предусмотрены также прогрессивная или дигрессивная пропорциональность, чтобы, например, при особенно высоких прикладываемых усилиях создавать посредством усилия натяжения особенно большую поддержку.
В порядке альтернативы или дополнительно к расположению сенсора прямо внутри натяжного элемента устройство измерения силы может быть расположено также в направляющем ролике или на передаточном элементе, чтобы там определять силу натяжения, прикладываемую через натяжной элемент или, соответственно, бандаж с контролируемым натяжением, и регулировать двигатель.
Двигатель через муфту может быть связан с натяжным элементом и/или подвижным компонентом, так что при останове двигателя или при разрядке аккумулятора подвижный компонент может как обычно приводиться в действие натяжным элементом. Таким образом, двигатель может подключаться между натяжным элементом и подвижным компонентом или при необходимости отключаться от них. Это соединение может быть реализовано, например, посредством центробежной муфты сцепления или подпружиненной разъединительной муфты.
С помощью муфты можно также создать модульное протезное устройство, т.е. предложить обычный тяговый (механический) протез с дополнительным компонентом в виде двигателя с управляющим устройством в качестве комплектующего компонента, чтобы обеспечить дополненную и улучшенную функциональность этого протезного устройства.
Этот подвижный компонент, в частности, это механическое захватное устройство, закреплено на протезном устройстве с возможностью замены, чтобы можно было обеспечивать различные функции для различных операций.
Натяжной элемент может быть выполнен как тросиковая тяга или ремень, который приводится в действие через бандаж с контролируемым натяжением. Тяговый тросик или натяжной элемент могут перемещаться в оболочке тросика или во втулке, причем концевой участок свободен и через направляющий ролик и при необходимости через подпорный ролик закреплен на подвижном компоненте, в частности, на механическом захватном устройстве.
Натяжной элемент по меньшей мере частично может быть пропущен внутри стакана протеза, причем подгонка натяжного элемента для каждого пациента или пользователя осуществляется техником-ортопедом. Как длина натяжного элемента, так и коэффициенты передачи и усиления индивидуально подгоняются под каждого пациента и могут регулироваться.
Двигатель может оказывать воздействие на натяжной элемент и тем самым повышать силу натяжения, передаваемую через этот натяжной элемент на подвижный компонент, т.е. использовать натяжной элемент в качестве единственного элемента, передающего усилие на подвижный компонент. В порядке альтернативы двигатель может быть отдельно соединен натяжным элементом с подвижным компонентом и, например, через зубчатую передачу или фрикционную передачу, при необходимости с промежуточно подключенной муфтой холостого хода может быть соединен прямо с подвижным компонентом. Передача усилия от двигателя на подвижный компонент в таком случае происходит не через натяжной элемент, а отдельно, благодаря чему не требуется никаких изменений в конструкции первоначального протезного устройства. Только сенсорное устройство должно быть связано с натяжным элементом, а вспомогательное устройство с двигателем, при необходимости с передачей, и управляющее устройство должны быть связаны с подвижными компонентами с передачей механического усилия.
Ниже приводятся примеры выполнения данного изобретения, подробно поясняемые с привлечением прилагаемых чертежей. На чертежах показано следующее.
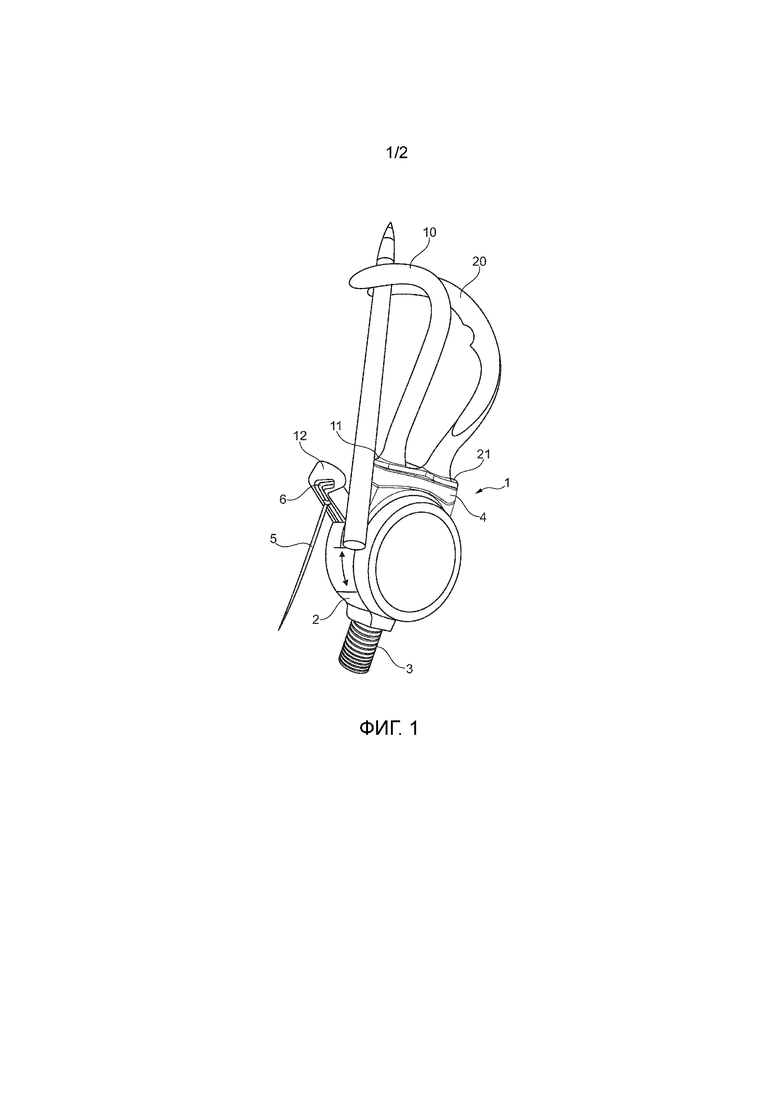
Фиг. 1 - подвижный компонент в форме захватного устройства; а также
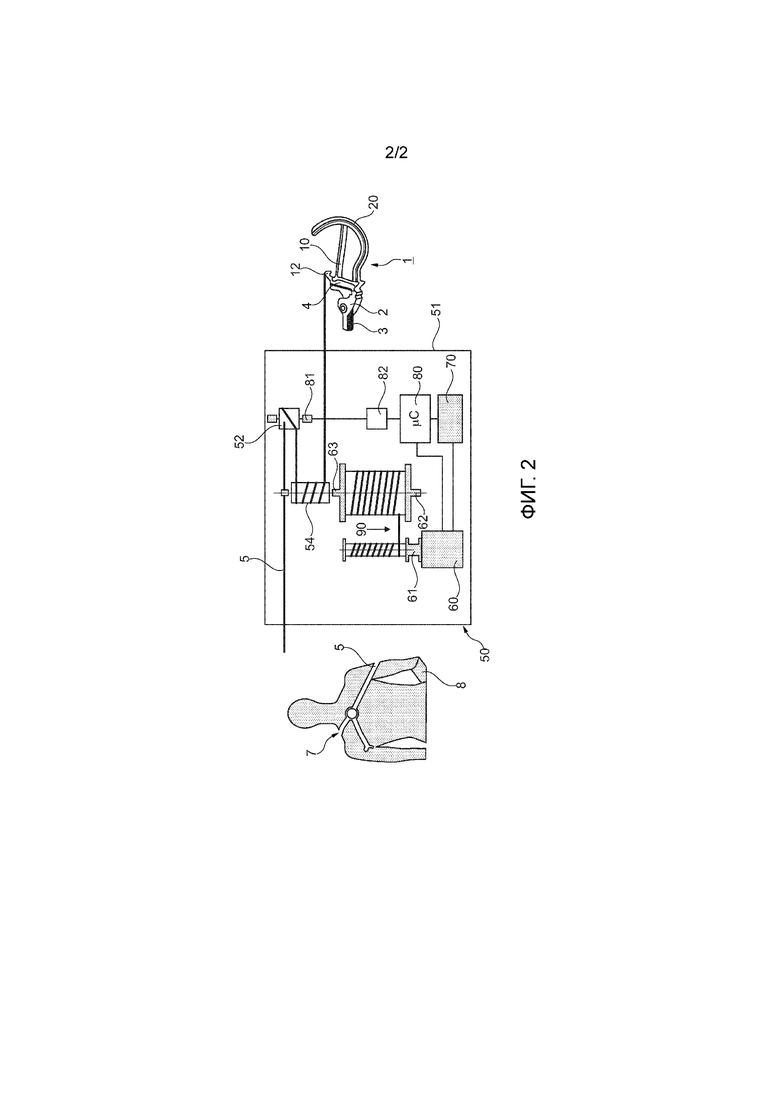
Фиг. 2 - схематичное изображение протезного устройства.
На Фиг. 1 отдельно показан подвижный компонент 1 в форме механического захватного устройства, которое выполнено в виде так называемого крюка. Это механическое захватное устройство 1 имеет основной корпус 2, на одном конце которого расположено или выполнено крепежное устройство 3 в виде резьбы для крепления к не показанному стакану протеза. На противоположном этому крепежному устройству 3 конце основного корпуса 2 закреплены две консоли 10, 20, выполненные крюкообразными с возможностью захватывания предметов, на Фиг. 1 в виде карандаша. Первая консоль 20 жестко закреплена на основном корпусе 2, а вторая консоль 10 установлена на основном корпусе 2 с возможностью поворота, причем не обозначенные поворотные оси выполнены таким образом, что вторая консоль 10 может отодвигаться от первой консоли 20, так что промежуток между обеими консолями 10, 20 может увеличиваться или, соответственно, уменьшаться. Такое перемещение второй консоли 10 от первой консоли 20 происходит с преодолением противодействия, которое позволяет обеим консолям 10, 20 прилегать друг к другу в не задействованном состоянии. Противодействие оказывается посредством резинового кольца 4, которое уложено вокруг соответствующего основания 11, 21 для второй консоли 10 или, соответственно, первой консоли 20. Резиновое кольцо 4 вставлено в пазы и таким образом уложено на обоих основаниях 11, 21 с возможностью замены. В зависимости от назначения и требуемого удерживающего усилия, которое должно прикладываться между обеими консолями 10, 20, в паз могут вставляться различные резиновые кольца 4. Если нужно лишь небольшое удерживающее усилие, то вставляется более податливое резиновое кольцо 4, а если требуется высокое удерживающее усилие, то применяется более стабильное резиновое кольцо 4 с небольшой растяжимостью и эластичностью, и, тем самым, оказывающее большее сопротивление отведению.
Консоли 10, 20 могут быть с возможностью замены закреплены на соответствующих основаниях 11, 21, например, привинчены или вставлены иным образом и зафиксированы с геометрическим замыканием.
Для движения второй консоли 10 от первой консоли 20 натяжной элемент 5 закреплен на третьей консоли 12, которая жестко соединена со второй консолью 10. Натяжной элемент 5 выполнен в виде ремня, работающего на растяжение, или кабеля или тросиковой тяги и с геометрическим замыканием размещен на третьей консоли 12 в выполненной на ней канавке 6. Канавка 6 проходит вдоль проксимальной стороны третьей консоли 12, т.е. той стороны, которая обращена к стакану протеза, и позволяет изменять отношение плеч рычага при передаче усилия от натяжного элемента 5 на вторую консоль 10. Чем дальше наружу перемещается натяжной элемент 5, тем больше ход рычага, благодаря чему обеспечивается уменьшение прикладываемого усилия при одновременном уменьшении раскрывающего пути между консолями 10, 20. Третья консоль 12 связана со вторым основанием 11 и отходит от него, так что за счет приложения усилия натяжения посредством натяжного элемента 5 второе основание 11, а тем самым и вторая консоль 10 поворачиваются вокруг оси поворота. Ось поворота ориентирована по существу перпендикулярно по существу кругообразной основной поверхности дискообразного основного корпуса 2. Если при натяжении натяжного элемента 5 третья консоль 12, а тем самым и вторая консоль 10 движутся в направлении стрелки вниз, то сила натяжения уменьшается, и третья консоль 12, а тем самым и вторая консоль 10 движутся в направлении стрелки вверх, так как резиновое кольцо 4 оказывает соответствующее противодействие. Подлежащий захватыванию предмет, в показанном примере выполнения это карандаш, удерживается между первой консолью 20 и второй консолью 10 и может быть опущен на третью консоль 12.
Приведение в действие натяжного элемента 5 в тяговом (механическом) протезе может осуществляться исключительно за счет перемещения части корпуса, например, плеча оснащенной или не оснащенной протезом руки.
На Фиг. 2 показано протезное устройство в схематичном представлении. На показанном схематично слева пациенте надет бандаж 7 с контролируемым натяжением, который связан со стаканом 8 протеза. Бандаж 7 с контролируемым натяжением закреплен на контралатеральном, свободном плече и петлеобразно обведен вокруг плеч. На спине, в области верхнего грудного отдела позвоночника эта петля закреплена в кольце, на котором закреплен натяжной элемент 5 в виде ремня, работающего на растяжение. Когда свободное плечо движется вперед, это вызывает оказание усилия натяжения на натяжной элемент 5. Натяжной элемент 5 проходит вдоль плеча со снабженной протезом стороны таким образом, чтобы этот натяжной элемент 5 проходил внутри стакана 8 протеза. В показанном варианте выполнения натяжной элемент 5 выполнен сначала в виде ремня, который затем внутри стакана 8 протеза соединен с тросообразным натяжным элементом 5, например, проволочным тросиком, тонким тросиком, жилой троса Боудена или т.п., или переходит в натяжной элемент 5 такого вида.
Внутри стакана 8 протеза расположено вспомогательное устройство 50, показанное схематично и в увеличенном масштабе. Вспомогательное устройство 50 может быть выполнено в виде модуля и иметь корпус 51, внутри которого проходит тросообразный натяжной элемент 5, приходящий от бандажа 7 с контролируемым натяжением. Натяжной элемент 5 проведен вокруг направляющего ролика 52, который связан с сенсорным устройством 81 в виде штыревого датчика силы. С направляющего ролика 52 натяжной элемент 5 пропущен по подпорному ролику 54, а после него закреплен на третьей консоли 12 подвижного компонента 1. На Фиг. 2 представлен альтернативный вариант выполнения этого подвижного компонента в виде механического захватного устройства 1, у которого основной корпус 2 выполнен не в виде круглого диска, а создающий противодействие элемент 4 является не резиновым кольцом, а имеет треугольный контур и представляет собой пружину, работающую на растяжение. Когда на натяжной элемент 5 посредством бандажа 7 с контролируемым натяжением прикладывается сила натяжения в направлении от механического захватного устройства 1, направляющий ролик 52 вращается, как и подпорный ролик 54, и за счет этого вызывает перемещение обеих консолей 10, 20 друг от друга.
Внутри вспомогательного устройства 50 установлен электродвигатель 60 с приводным валом 61. Двигатель 60 снабжает электрической энергией электрический аккумулятор 70. С двигателем 60 связано управляющее устройство 80, посредством которого двигатель 60 активируется или деактивируется. В показанном примере выполнения направляющий ролик 52 связан с сенсорным устройством 81 в виде штыревого датчика силы. Когда к натяжному элементу 5 прикладывается сила натяжения, на направляющий ролик 52 передается вращающий момент и усилие, которое измеряется посредством сенсорного устройства 81. Через усилитель 82 сигнала этот сигнал передается на управляющее устройство 80. Когда на направляющем ролике 52 детектируется сила натяжения внутри натяжного элемента 5, двигатель 60 активируется посредством управляющего устройства 80. Приводной вал 61 приводится в действие. С приводным валом 61 через тросиковую передачу 90 связан выходной вал 62. Приводной вал 61 наматывает тросик управления муфтой и за счет этого поворачивает выходной вал 62, который через муфту 63 соединен с подпорным роликом 54. Муфта 63 может быть выполнена как центробежная муфта сцепления или как подпружиненная зубчатая муфта. Возможно также, что эта муфта имеет торцевое зубчатое зацепление с зубьями пилообразной формы, которые ориентированы так, что передача усилия происходит только в направлении поддержки усилия натяжения натяжного элемента 5.
В представленном примере выполнения подпорный ролик 54 для раскрытия механического захватного устройства 1 должен вращаться влево, боковые стороны торцевых зубьев пилообразной формы в таком случае полого спадали бы вправо. Вместо показанной тросиковой передачи между двигателем 60 и подпорным роликом 54 могут применяться зубчатая передача, зубчатая ременная передача, передача барабанного типа или фрикционная передача, или планетарная передача. За счет различных диаметров приводного вала 61 и выходного вала 62 могут реализовываться различные передаточные числа тросиковой передачи 90, а подгонка может легко осуществляться путем замены соответствующих валов или барабанов на соответствующих валах 61, 62 и/или на подпорном ролике 54.
Вспомогательное усилие, создаваемое двигателем 60, может регулироваться посредством управляющего устройства 80. Эта регулировка может осуществляться в зависимости от запланированного назначения механического захватного устройства 1 или от личных предпочтений пользователя.
Вместо штыревого датчика силы 81 на направляющем ролике 52 может быть предусмотрено размещение сенсорного устройства 8 по ходу тягового тросика 5, например, в виде датчика натяжения, который определяет силу натяжения, действующую в натяжном элементе 5. Передача полученных данных с датчика на усилитель 82 сигнала может осуществляться беспроводным путем или по проводам. Натяжной элемент 5 на большей части длины должен проходить внутри оболочки, чтобы избежать трения натяжного элемента 5 о кожу или одежду пользователя.
Вспомогательное устройство 50 может быть выполнено в виде модуля и просто устанавливаться на имеющийся тяговый (механический) протез. Натяжной элемент 5 для встраивания должен быть лишь уложен вокруг направляющего ролика 2, а также подпорного ролика 54, что означает лишь незначительное удлинение натяжного элемента 5 по сравнению с прямым креплением к механическому захватному устройству 1. Если аккумулятор 70 разрядился или в двигателе 4 возник дефект, то протезное устройство может продолжать использоваться без риска ограничения его основных функций, снизится лишь комфорт.
Вместо приложения усилия с помощью двигателя 4 через натяжной элемент 5 в альтернативном варианте выполнения привод непосредственно соединяется с подвижной второй консолью 10. Вспомогательное устройство 50 может быть интегрировано в основной корпус 2 и через передаточное устройство, например, фрикционную передачу или зубчатую передачу соединено соответствующей муфтой 63 с передачей усилия соединено с этой подвижной консолью 10. В этом случае, когда с помощью сенсорного устройства 81, которое тоже может быть расположено прямо в натяжном элементе 5, детектируется усилие натяжения, это сенсорное устройство 81 может передавать эту информацию по кабелю или беспроводным путем на усилитель 82 сигнала или на управляющее устройство 80, в результате чего активируется двигатель 60. Таким образом можно отказаться от нагружения натяжного элемента 5 усилием, дополнительно прикладываемым от двигателя. Изменений в сочленении натяжного элемента 5 с механическим захватным устройством 1 не потребуется.
Вспомогательное устройство 50 предоставляется как отдельный механический компонент с двигателем 60 и встроенным управляющим устройством 80 вместе с аккумулятором 70 в виде предварительно изготовленного модуля, и его нужно лишь закрепить в основном корпусе 2 или на этом основном корпусе 2. В таком случае через подходящую муфту 63 усилие от двигателя 60 передается для приведения в действие подвижной консоли 10. Величина прикладываемого усилия, как и длительность задаются тяговыми усилиями, которые определяются в сенсорном устройстве 81. Может быть установлена линейная пропорциональность между прикладываемой силой натяжения через натяжной элемент 5 и дополнительно предоставляемым усилием от двигателя; возможны и альтернативные коэффициенты пропорциональности. Общим для этих примеров осуществления является то, что при отказе вспомогательного устройства 50 функциональность механического захватного устройства 1 сохраняется.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТЕЗНЫЙ ЗАХВАТНЫЙ МОДУЛЬ | 2008 |
|
RU2472470C2 |
| ПЕРЕКЛЮЧАЮЩАЯ МУФТА ДЛЯ ПРОТЕЗОВ | 2006 |
|
RU2429803C2 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ОБЕИХ РУК ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2749840C1 |
| ИСКУССТВЕННЫЙ ПАЛЕЦ | 2014 |
|
RU2667624C2 |
| УДЕРЖИВАЮЩЕЕ ГИЛЬЗУ ПРОТЕЗА УСТРОЙСТВО И СИСТЕМА ИЗ ГИЛЬЗЫ ПРОТЕЗА И УДЕРЖИВАЮЩЕГО ГИЛЬЗУ ПРОТЕЗА УСТРОЙСТВА | 2016 |
|
RU2687634C1 |
| Полиспастный привод подвижных элементов шарниров и схвата манипулятора робота | 2019 |
|
RU2737323C1 |
| ОРТОПЕДИЧЕСКОЕ УСТРОЙСТВО | 2013 |
|
RU2652893C2 |
| УСТРОЙСТВО НАТЯЖЕНИЯ РЕМНЯ ДЛЯ СИСТЕМЫ РЕМНЕЙ БЕЗОПАСНОСТИ В АВТОМАШИНАХ | 1992 |
|
RU2043937C1 |
| СИСТЕМА ПРОТЕЗНОЙ ГИЛЬЗЫ, А ТАКЖЕ ПРОТЕЗНАЯ ГИЛЬЗА И ВКЛАДЫШ | 2017 |
|
RU2728434C2 |
| СТАЦИОНАРНЫЙ ЗОНТ | 1992 |
|
RU2071714C1 |
Изобретение относится к медицине, а именно к протезам руки. Протез содержит закрепленный на бандаже с контролируемым натяжением натяжной элемент. Натяжной элемент при приложении усилия натяжения приводит в действие подвижный компонент протезного устройства. Натяжной элемент снабжен сенсорным устройством, которое детектирует срабатывание натяжного элемента и запускает двигатель. Двигатель прилагает к натяжному элементу усилие натяжения для приведения в действие или для поддержания движения подвижного компонента. Достигается возможность обеспечения не вызывающей утомления работы. 10 з.п. ф-лы, 2 ил.
1. Протез руки, содержащий закрепленный на бандаже (7) с контролируемым натяжением натяжной элемент (5), который при приложении усилия натяжения приводит в действие подвижный компонент протезного устройства, отличающийся тем, что натяжной элемент (5) снабжен сенсорным устройством (81), которое детектирует срабатывание натяжного элемента (5) и запускает двигатель (60), причем двигатель (60) прилагает к натяжному элементу (5) усилие натяжения для приведения в действие или для поддержания движения подвижного компонента (1).
2. Протез руки по п. 1, отличающийся тем, что подвижный компонент (1) выполнен в виде механического захватного устройства или шарнирного компонента.
3. Протез руки по п. 1 или 2, отличающийся тем, что вспомогательное усилие, приложенное с помощью двигателя (60), пропорционально силе натяжения, приложенной посредством натяжного элемента (5).
4. Протез руки по любому из предыдущих пунктов, отличающийся тем, что двигатель (60) через передачу (90) соединен с натяжным элементом (5) или с подвижным компонентом (1).
5. Протез руки по п. 4, отличающийся тем, что передача (90) выполнена в виде тросиковой передачи, зубчатой ременной передачи, зубчатой передачи, передачи барабанного типа, фрикционной передачи или планетарной передачи.
6. Протез руки по п. 4 или 5, отличающийся тем, что передаточное число и коэффициент пропорциональности являются регулируемыми.
7. Протез руки по любому из предыдущих пунктов, отличающийся тем, что вспомогательное усилие может регулироваться с помощью двигателя (60).
8. Протез руки по любому из предыдущих пунктов, отличающийся тем, что к подвижному компоненту (1) приложено усилие пружины, которое противодействует натяжному элементу (5) и/или двигателю (60).
9. Протез руки по любому из предыдущих пунктов, отличающийся тем, что сенсорное устройство (81) содержит датчик силы в натяжном элементе (5) или в направляющем ролике (52).
10. Протез руки по п. 9, отличающийся тем, что датчик силы (81) выполнен в виде штыревого датчика силы.
11. Протез руки по любому из предыдущих пунктов, отличающийся тем, что двигатель (60) через муфту (63) связан с натяжным элементом (5) и/или с подвижным компонентом (1).
| US 4258441 A1, 31.03.1981 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОТЕЗОМ ПЛЕЧА | 1992 |
|
RU2063194C1 |
| Протез верхней конечности | 1988 |
|
SU1627172A1 |
| Устройство для управления протезом руки | 1990 |
|
SU1806789A1 |
| US 20070250179 A1, 25.10.2007. | |||

